Dossier de montage pour RBMM Robot moustaches à motoréducteurs
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Dossier de montage pour RBMM
Robot moustaches à motoréducteurs
Nomenclature
Désignation Quantité
Base usinée du robot 1
Motoréducteur assemblé 2
Ensemble vis diam2x12mm + écrou M2 + rondelles 8
Carte électronique Rooby 1
Borniers à vis 2
Support CI 16 broches 1
CI L293D 1
Interrupteur à glissière ON/OFF 1
Barrette mâle 3 points 2
Ensemble vis diam3x8mm + écrou M3 2
Ensemble vis diam3x12mm + écrou M3 + entretoises 4
Roues 2
Ensemble vis diam3x40mm + 2 écrous M3 1
Coupleur de piles 1
Fil rouge 1m 1
Fil noir 1m 1
Contacts fin de course 2
Moustaches droites et gauches 2
Ensemble vis 2x12mm + écrou M2 + rondelles 4
Ensemble vis 2x9mm + écrou M2 + rondelles 4
1. Dégrapper les pièces de la base du robot.
Ces pièces sont utilisées uniquement pour les robots comportant des servomoteurs (Réf : RBSA et
RBSB)
Pièces à dégrapper
(support pour servomoteurs)
1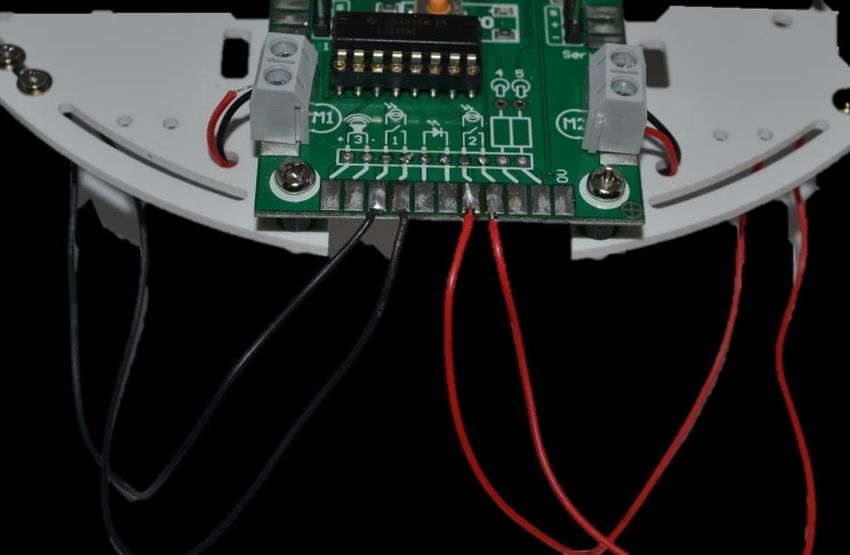
2. Monter les deux motoréducteurs avec les 8 vis (diam2x12mm) comme indiqué ci-
dessous.
Trous de fixation du
motoréducteur 1.
Ensemble vis
diam2x12 mm+
écrous + rondelles
(quantité : 8)
omenclature :
Trous de fixation du
motoréducteur 1.
Trous de fixation du
motoréducteur 2.
Trous de fixation du
Motoréducteurs
Quantité : 2
motoréducteur 2.
Mettre une rondelle
entre la tête de vis et
la base. (x4)
Mettre une rondelle
entre la tête de vis et
la base. (x4)
Vue du dessus
2
Mettre une rondelle
et un écrou pour
chaque fixation. (x4)
Mettre une rondelle
et un écrou pour
chaque fixation. (x4)
Vue du dessous
3. Montage de la carte électronique
Souder tous les composants ci-dessous sur la carte électronique en respectant les indications
suivantes :
Borniers
branchement
motoréducteurs.
(M1 et M2)
CI pour pilotage des
motoréducteurs.
Implanter les Support CI
picots les plus
petits dans la Borniers
carte. branchement
servomoteurs.
Interrupteur
ON/OFF.
3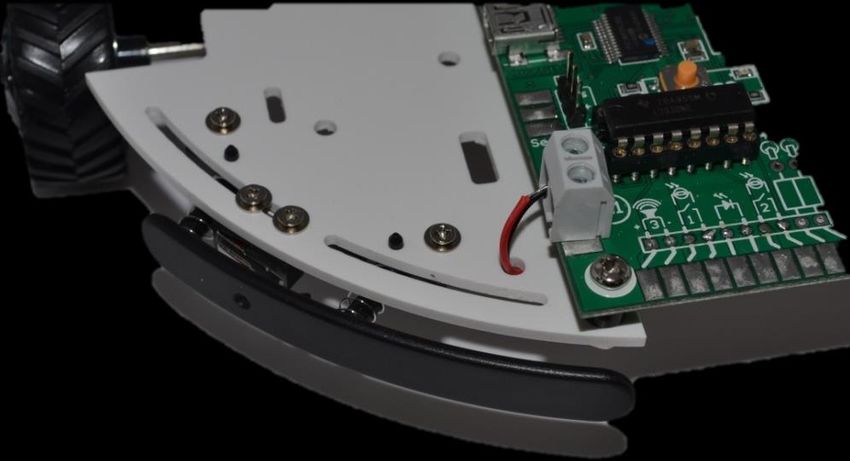
Attention à
bien respecter
le sens du CI
imposé par
l’encoche.
4. Montage du support de piles sur la base avec l’ensemble vis (diam3*8mm) + écrous ci-
dessous.
Trous de fixation
du support de piles
Ensemble vis diam3x8 mm +
écrous
(quantité : 2)
Respecter le sens d’implantation du coupleur de piles. Il est nécessaire de le positionner au maximum
à l’arrière du robot, en butée.
Passer les fils du
coupleur de piles
comme indiqué ici
Vue de dessus
4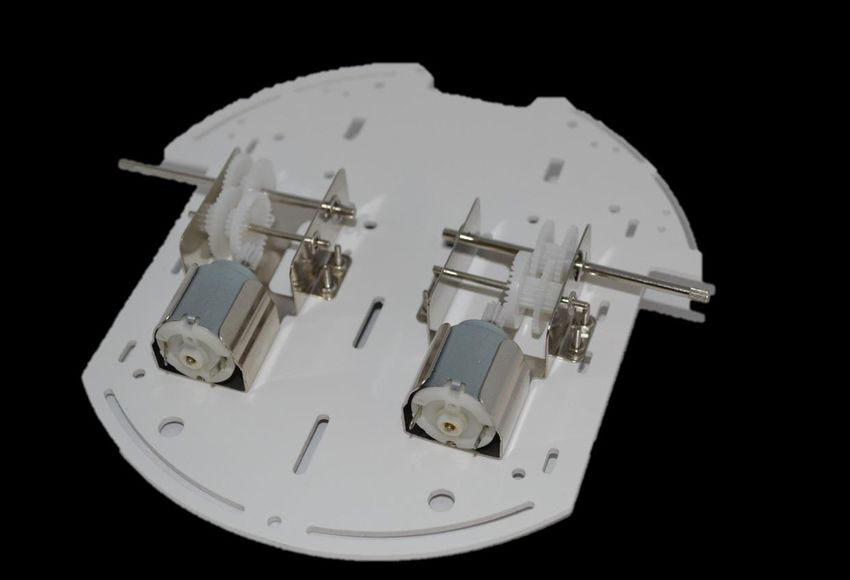
Vue de dessous
5. Fixer la carte électronique sur la base avec l’ensemble vis (diam3*12mm) + écrous +
entretoises ci-dessous
Ensemble vis diam
3x12mm + écrous +
entretoises
Quantité : 4
Avant de fixer la carte, passer les fils
du support de piles dans les trous
présents sur la carte. Fil rouge vers le
+ et fil noir vers le -.
Trous de fixation
de la carte vue de
dessous
5
Positionner les entretoises Fil noir
entre la carte et la base
comme indiqué ci-contre. Fil rouge
Vue de dessus
Souder les fils du
support de piles sur
la carte.
6. Monter les roues
Emboiter les roues
en force jusqu’en
butée.
6
7. Monter la vis de guidage (diam3x40mm)
Trou pour vis de guidage
Ensemble vis diam3x40 mm
+ écrous
Quantité : 1
Mettre un écrou de
part et d’autre de la
base
Tête de vis
Régler la hauteur de la vis de manière à ce que le robot soit parallèle au sol.
Vous pouvez utiliser un niveau à bulle (réf : BULLE).
7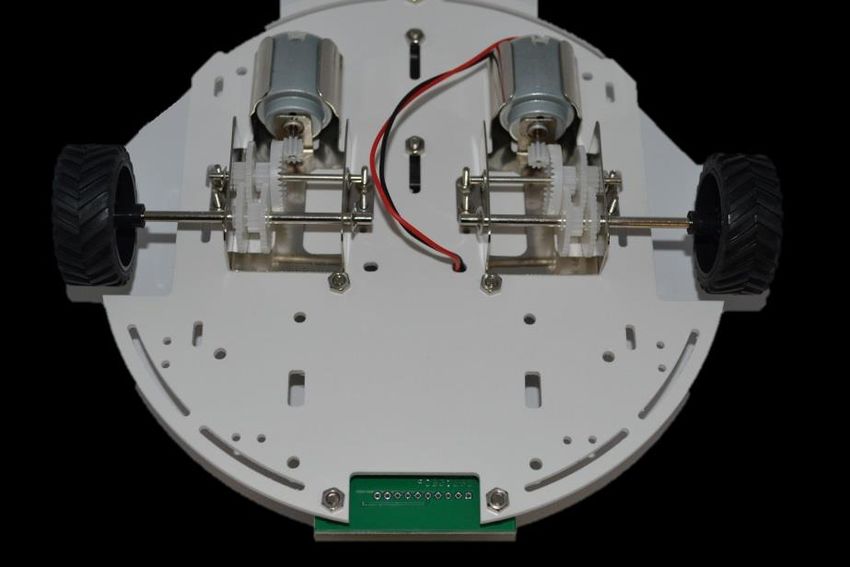
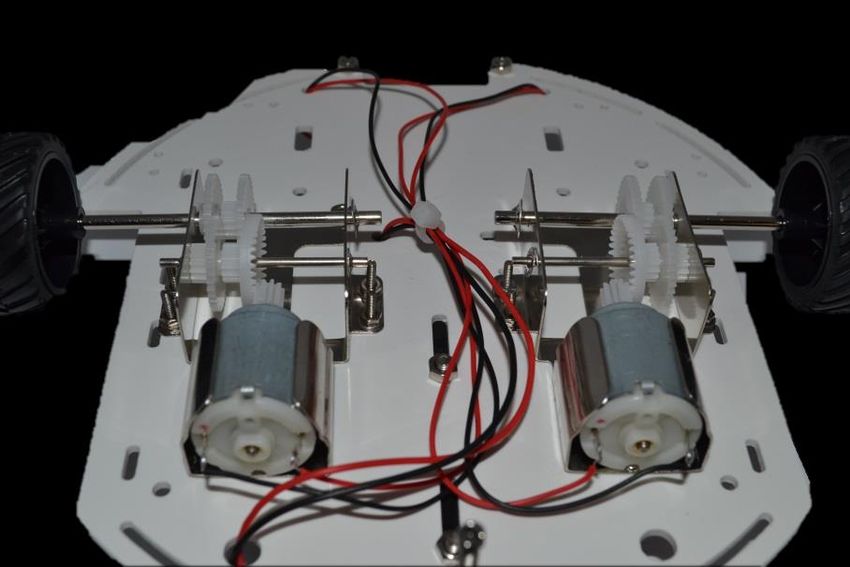
8. Câbler les moteurs
Couper deux fils rouge et deux fils noirs de 20 cm.
Dénuder et étamer chaque bout de fil.
Souder le fil rouge sur le
+du moteur et câbler le fil
noir sur le – du moteur.
Repère + présent sur le Faire la même chose pour le
moteur. Attention il n’est deuxième moteur.
pas en couleur sur vos
moteurs.
Passer les fils de
chaque moteur dans les
trous comme indiqué
ci-contre en respectant
une logique moteur
droit / moteur gauche.
Fil noir
Fil noir
Fil rouge
Fil rouge
Câbler les moteurs
sur les borniers
8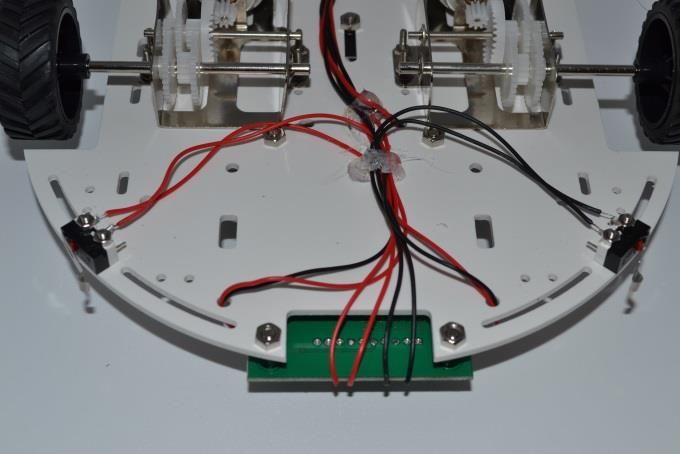
9. Câbler et monter les contacts fin de course avec l’ensemble vis diam2x12mm + écrous +
rondelles
Vue de dessus
Ensemble vis
diam 2x12mm +
écrous + rondelles
Quantité : 4
Fixer le contact fin de course avec Attention le contact fin de course
les vis 2x12mm. Mettre une rondelle doit être mis en butée pour un
de part et d’autre de la base. Faire la fonctionnement optimal. Faire la
même chose pour l’autre côté. même chose pour l’autre côté.
Couper deux fils rouges et deux fils noirs de 10 cm.
Dénuder et étamer chaque fil.
Pour faciliter la compréhension, prendre une couleur de fil par contact.
Ex : rouge pour contact gauche et noir pour contact droit.
Vue de dessous
Souder les deux
fils sur ces bornes.
Faire de même
pour l’autre fin de
course.
Fin de course opposé
9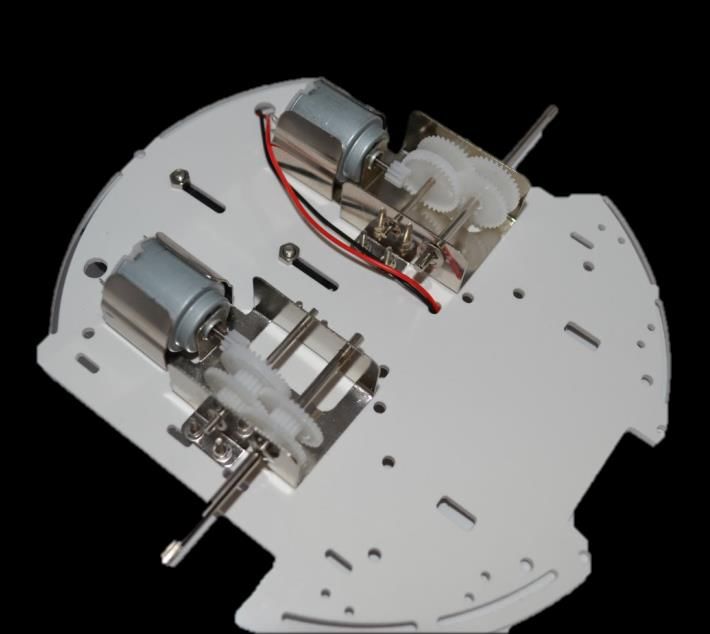
Souder le capteur de fin
de course droit comme
indiqué ici. Souder le capteur de fin
de course gauche comme
indiqué ici.
Fil noir
Fil rouge
10. Astuce
Sous le robot, vous pouvez coller ou attacher les câbles avec un collier.
11. Monter les moustaches avec l’ensemble vis 2x8mm +° écrous + rondelles
Ensemble vis 2x8mm +
écrous + rondelles
Quantité : 4
Le positionnement de la moustache
est imposé par deux petits ergots.
Fixer la moustache avec les vis
2x8mm. Mettre une rondelle de part
et d’autre de la base. Faire la même 10
chose pour l’autre côté.Mise en route du robot
1/ Télécharger un exemple de programme. Pour cela, connectez-vous sur notre site internet
www.technologieservices.fr puis utiliser l’outil de recherche en haut à droite et saisir la référence du
robot (par exemple je saisis « RBMM » pour le robot programmable moustaches RoobY®).
Sélectionner le robot dans la liste des résultats de recherche. Dans l’onglet ressources associées,
téléchargez l’exemple de programme.
A l'ouverture du programme, une fenêtre de confirmation vous demandera si vous voulez conserver ou
écraser la configuration du logiciel.
Cliquer sur OUI
2/ Configuration
a/ Basculer l’interrupteur du circuit imprimé sur ON.
b/Brancher le câble mini USB entre le robot et le PC.
Vitesse mini
selon votre
robot Vitesse maxi
Attention régler les curseurs selon votre robot. Ne pas selon votre
se fier à ces réglages !! robot
c/ Pour la vitesse maximale, faire en sorte que le robot avance en gardant son cap sans tourner
à gauche ou à droite, pour cela faire varier le curseur du moteur de gauche ou de droite.
Régler la vitesse minimale de telle sorte que le moteur soit à l’arrêt et ne force pas. Attention, le
moteur peut être alimenté et ne pas tourner. Il est indispensable de bien régler le seuil bas pour éviter que le moteur
force et chauffe inutilement. Utiliser les flèches haut et bas du clavier pour affiner le réglage.
Astuce : approcher le moteur de votre oreille au moment du réglage. Il est possible d’entendre si le moteur force ou
pas.
Attention suivant les moteurs livrés les cages d’engrenages sont plus ou moins serrées, ce qui peut faire
énormément varier la vitesse maximale de rotation des roues.
Nous vous conseillons dans un premier temps de vérifier la dureté des engrenages en les faisant tourner à la main.
Si ces derniers sont trop bloqués, écartés la cage d’engrenages pour laisser un degré de liberté plus important.
d/ Ne cocher pas « inverser le sens de rotation », les étapes préalables de câblage des moteurs
font avancer le robot dans le bon sens.
113/ Télécharger le programme dans le robot et appuyer sur GO (circuit imprimé).
Remarque :
Cette action est possible uniquement lorsque la carte est connectée et sous tension.
Des fenêtres d'informations indiquent le statut du transfert en cours.
Une fois le programme transféré, le simulateur se met en mode automate .
Pour exécuter le programme il faut soit:
Appuyer sur le bouton "Go" de la carte, le programme se lance.
Remarque :
Un second appui sur le bouton "Go" arrêtera le programme si celui-ci est en cours d'exécution.
Il est possible d’exécuter le programme en mode debug en cliquant sur l'icône et à tout moment,
interrompre le programme , l'exécuter en mode pas à pas , ou l'arrêter définitivement .
12Vous pouvez aussi lire