La robotique agricole : Une opportunité pour repenser la mécanisation agricole - M. Berducat (Irstea) - C. Huyghe (Inra) - Wedia
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

La robotique agricole : Une opportunité pour
repenser la mécanisation agricole
M. Berducat (Irstea) - C. Huyghe (Inra)
Mercredi 2 mars 2016 (15 h à 17h)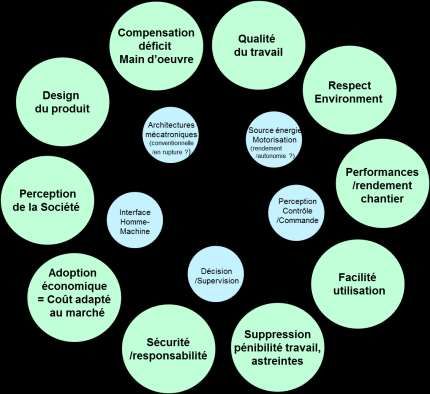
Définition : C’est quoi un robot ?
Définition 1 : (source Wikipédia)
« Systèmes dotés d’une souplesse d’utilisation capables d’exécuter sans relâche
des tâches pénibles et fastidieuses (voir dangereuses) »
Exemples empruntés à la Robotique Manufacturière
dans l’industrie: robots de peinture, soudage, parachèvement,… 02
Déclinaison pour l’agriculture : le robot de traite
un réel succès depuis les premiers développements dans les années 90
Marché mondial:
5000 robots/an
(Source : Fédération
Internationale de Robotique
2013)
Réduction des travaux répétitifs, de la pénibilité du travail
Bénéfices Sociaux Economiques Environnementaux Zootechniques 03
Définition : C’est quoi un robot ?
Définition 2 :
« Systèmes dotés d’un certain degré d’intelligence et des moyens de perception et
de commande associés permettant de réagir seuls à un changement de
circonstance (dont situations imprévues) dans l’environnement de travail »
Exemples empruntés à la Robotique de Service à Usage Grands Publics
aspirateurs, robots d’assistance aux personnes,… 04
Déclinaison toujours dans le secteur de l’élevage
Robots mobiles évoluant dans des espaces structurés que sont les bâtiments d’élevage
Années 2010 :
- Robots distribution
d’aliments
Années 2000 :
- Robots de nettoyage
- Robots pousse-fourrage
Réduction des travaux répétitifs, de la pénibilité du travail
Bénéfices Sociaux Economiques Environnementaux Zootechniques 05
Systèmes robotiques actuels :
surtout « robotique coopérative centrée utilisateur »
Définition Cobotique :
«Interaction réelle, directe ou téléopérée entre un opérateur et un système
robotique qui permet de travailler avec l’homme, de l’accompagner et de l’aider
dans des tâches ou des situations particulières »
Exemples empruntés à la Robotique de Service à Usage Professionnelle
06
Drones d’observations, Robots d’interventions médicales, Exosquelettes…
Systèmes «robotisés» pour l’agriculture en espaces ouverts
semi ou non structurés : encore un challenge !!
Offres technologiques actuelles aux stades du prototype….
Exemples :
Ladybird Rowbot BoniRob2
Australian Center for Field Robotics (ACFR) Rowbot Systems LLC + Carnegie Robotics LLC Applied Sciences Osnabruck Univ
Univ Sydney - Australie + (Univ Carnegie Mellon) + AMAZONE + BOSH
USA Pennsylvanie - USA (Allemagne) 07
Ladybird.wmv Rowbot.wmv BoniRob.wmv
Systèmes «robotisés» pour l’agriculture en espaces ouverts
semi ou non structurés : encore un challenge !!
…ou offres commercialisées en quelques unités
Exemples :
Vitirover Oz robot Cäsar robot
Source : Vitirover SAS Naïo Technology RAUSSENDORF Gmbh
(France) (France) Univ Dresde – Fraunhofer Ml
(Allemagne)
Naio.wmv
Casar.wmv 08
Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
de véritable besoins du terrain !!
Exemple : Robots pour la protection phytosanitaires des cultures
Protection de la santé des opérateurs (réductions à l’exposition des produits, aux TMS)
Maitrise fine des intrants par de nouveaux outils intelligents associés
Bénéfices Sociaux Economiques Environnementaux Agronomiques 09
Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
des réponses à dimensionner p/r aux types de chantiers
Exemple des robots pour le désherbage mécanique
Source : Illinois Univ - USA Source Univ Osnabrük - A Bonirob (Amazone, Bosh, Osnabrük) - A
un rapide calcul :
Rendement de chantier : 1m/s x 0,5m x 3600s = 1 800 m2 (0,18 ha/h) => 1,8 ha/10 heures
10Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
des réponses à dimensionner p/r aux types de chantiers
Exemple des robots pour le désherbage mécanique en comparaison avec solutions plus classiques
un rapide calcul :
Rendement de chantier : 3m/s x 12 m x 3600s = 129 600 m2/1h => 130 ha/10 heures
Robocrop.wmv 11Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
des réponses à dimensionner p/r aux types de chantiers
Vers des propositions de solutions bien adaptées pour les robots de binage :
Exemple de Exemples de
solution pour solutions pour
Exploitations exploitations
maraichères maraichères
de petites de grandes
surfaces surfaces
Oz robot Anatis
Naïo Technology Carré
(France) (France) PUMAgri
Sitia & Co
(France)
Techniques alternatives à l’usage des herbicides
Bénéfices Sociaux Economiques Environnementaux Agronomiques 12Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
des réponses à dimensionner p/r aux types de chantiers
Vers des propositions de solutions bien adaptées pour les robots de binage :
Exemple de
solution pour
les grandes
cultures :
Coopération de
machines
intelligentes de
tailles moyennes
RHEA (2010-2014):
Robot Fleets Highly for Effective Agriculture
and Forestry Management
(Spain)
Réduction de la compaction des sols par les machines
Bénéfices Sociaux Economiques Environnementaux Agronomiques RHEA.wmv
13Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
Opportunité de solutions en rupture avec le «toujours plus gros» !!
Exemple de
solution pour
les grandes
cultures :
Coopération de
machines
Limitations « gros engins»:
- compaction du sol
intelligentes de
- difficulté du contrôle grandes largeurs tailles moyennes
de travail par rapport à certains profils du
terrain en mode convoi
- «hors gabarit» / réseau routier rapproché Convoi.wmv
Réduction de la compaction des sols par les machines
Bénéfices Sociaux Economiques Environnementaux Agronomiques 14Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
Possibilité de repenser l’architecture des véhicules
Exemples de pistes :
- transmission
- motorisation électrique (hybride, pile à combustible,..)
petite/moyenne puissance : possibilité de bénéficier
plus facilement des retombées des futurs composants
de l’automobile
Réduction de la compaction des sols par les machines
Bénéfices Sociaux Economiques Environnementaux Agronomiques 15Systèmes «robotisés» pour les espaces ouverts semi ou non structurés :
Tailles des matériels compatibles avec de nouvelles pratiques
Ex: Potentiel de nouvelles pratiques culturales au service de l’agro-écologie (ex cultures associées)
Bénéfices Sociaux Economiques Environnementaux Agronomiques 16Robotique & Agriculture : Niveaux de complexité
Cas des productions végétales :
- Absence de contact physique :
- Opérations de suivis des cultures, transports, pulvérisation…
- Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
Source: A. Bechar
- Avec contact physique et actions de préhension ARO Volcani Center - Israel
- cueillette de fruits, taille, (trans)plantation….
17Robotique & Agriculture : Nécessité de faire «preuve de réalisme»
BAUDET-ROB.wmv
Exemple : BAUDET-ROB - plateforme d’assistance logistique
18Robotique & Agriculture : Autres retombées / rôles à jouer
Exemples :
- Compenser la raréfaction de la main d’œuvre qualifiée
- Favoriser l’attractivité du secteur d’activité agricole par l’intégration des Nouvelles Technologies
- ….
Bénéfices Sociaux Economiques Environnementaux Agronomiques 19Robotique & Agriculture: Pas seulement une dimension technologique !!
20Merci pour votre attention
Vous pouvez aussi lire