Nouveau robot SCARA i4-H - Support Omron
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Février 2021 / Fernando Vaquerizo traduction Sylvain Etienne
Nouveau robot
SCARA i4-H
OMRON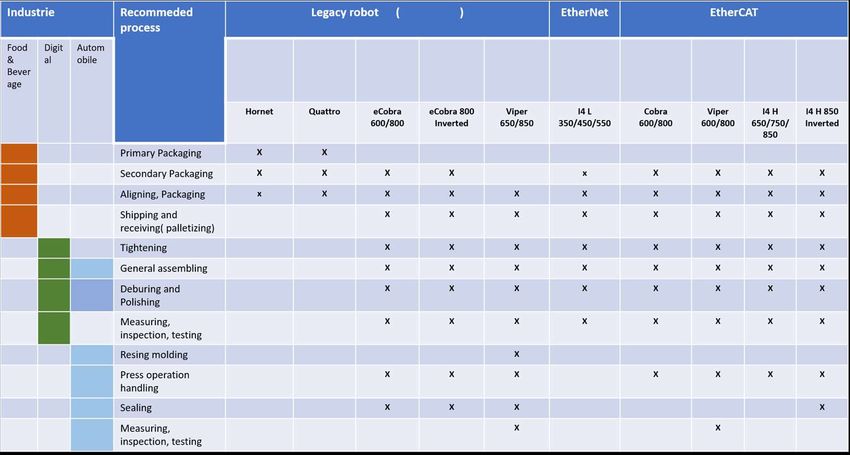
Contenu 1. Introduction et tendance sur les SCARA 2. Rappel sur l’offre robotique fixe 3. Détails de la solution SCARA i4-H
Introduction
▪ Les utilisateurs finaux réfléchissent et adaptent leurs usines de
fabrication pour surmonter certains défis sur le marché.
Pénurie de main-
d’œuvre Personnalisation de masse
▪ La pénurie de main-d’œuvre, la personnalisation de masse et
dernièrement l’effet COVID, montre aux fabricants qu’ils doivent avoir
une fabrication plus résiliente pour assurer la continuité des affaires
pendant des crises comme celle-ci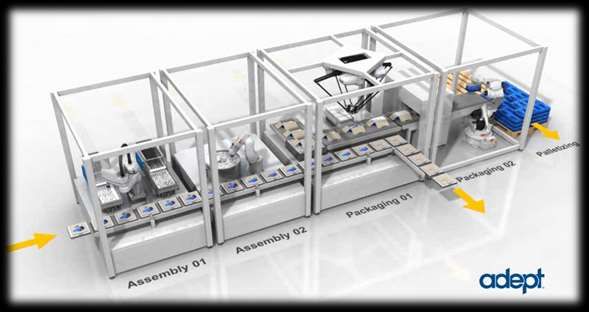
Introduction L’automatisation et la robotique sont l’une des réponses clés à ces défis. Les robots offrent toujours une solution beaucoup plus flexible et réutilisable, en dehors des avantages tels que la performance, la qualité et la réduction drastique du coût total de possession (maintenance réduite, disponibilité de la machine, etc...).
Tendances du marché
Le prix des robots SCARA est en baisse, ce qui contribue à utiliser de
plus en plus de robots SCARA dans un plus large éventail d’applications
qui étaient auparavant résolues manuellement ou avec des actionneurs
linéaires :
Opérations manuelles
Systèmes linéaires XYZ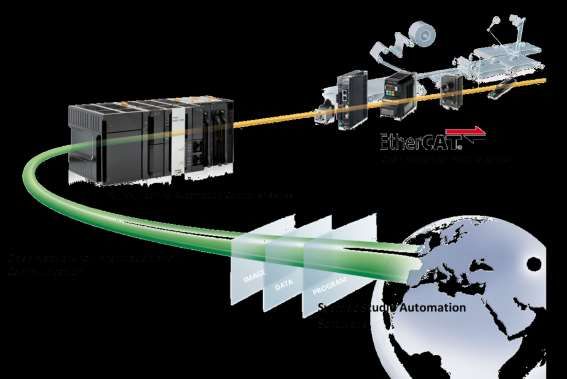
Omron apporte la bonne réponse Le marché exige des performances concurrentielles et un coût total d’exploitation de plus en plus faible Omron sort le nouveau robot i4-H SCARA, la Formule 1 des robots. Il apporte des fonctionnalités de maintenance performantes et avancées qui aideront les utilisateurs finaux ainsi que le contrôleur intégré à améliorer leurs lignes de fabrication et à réduire considérablement le coût total d’exploitation.

Contenu 1. Introduction et tendance sur les SCARA 2. Rappel sur l’offre robotique fixe 3. Détails de la solution SCARA i4-H
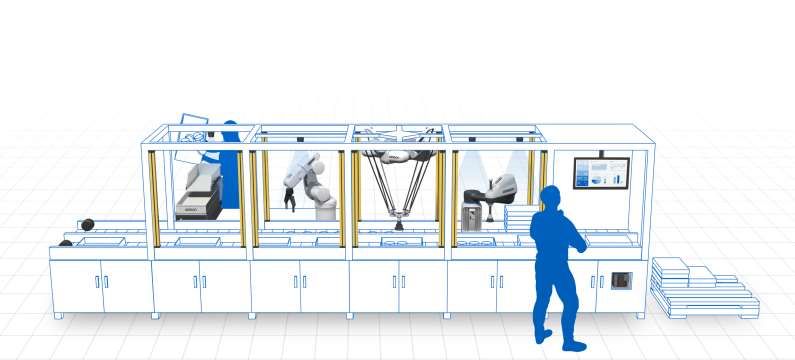
Aperçu d’ensemble, les robots fixes
Industrie Héritage par l’acquisition Adept Ethernet EtherCAT
Processus
électronique
Automobile
alimentaire
recommandé
Digitale
Agro-
Packaging primaire
Packaging secondaire
Mise en ligne, pack.
Expédition/réception
palettisation
Vissage
Assemblage général
Ebavurage et
polissage
Mesure, inspection
test fonctionnel
Moulage résine
Manipulation des
opérations de presse
Scellage
Mesure, inspection
test fonctionnel
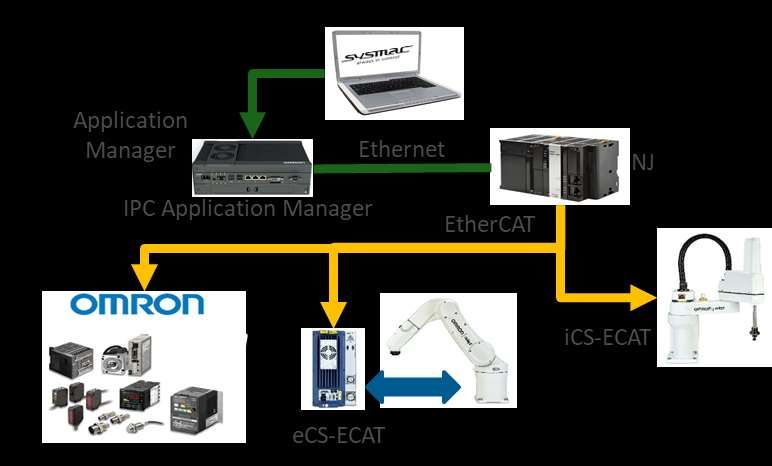
Contrôleurs robots intégrés et i4-H ECAT
Pick & Place /
Manipul-
ation des
opérations
de presse
Assemblage NJ5-R
Emballage
ACE4.2
secondaire
Scellage
RE V1.43
Mesure,
inspection,
essais
(Programmation FB et/ou V+ iCS, eCS, i4-H ECAT
et configuration)
Distribution flexible Expédition
et réception
Mise en
ligne
(Programmation
FB et/ou V+ et App
Controller NJ5-R
Vissage configuration)
GigE
Manut-
Tracking ention
Application Manager
Vision Manager
Montage RE V1.43 Pack Manager
ACE4.2
Serveur, client iCS, eCS, i4-H ECAT
Assembla-
ge général
Runtime
Contenu 1. Introduction et tendance sur les SCARA 2. Rappel sur l’offre robotique fixe 3. Détails de la solution SCARA i4-H
Aperçu du produit - i4H (EtherCAT)
Nouveau look Omron & apparence (Modèle Standard)
I4-850H I4-750H I4-650HAperçu du produit - i4H (EtherCAT)
Nouveau look Omron & apparence (Modèle inversé)
La seule différence entre standard et inversé est le bras intérieurVideo: des robots Les liens vers le site https://industrial.omron.eu/en/products/i4H https://industrial.omron.eu/en/products/i4H#videos
Aperçu du produit
(i4-H ECAT et Ethernet)
▪ Le robot comprend des amplificateurs et un contrôleur robot dans la
base.
▪ Deux contrôleurs robot sont fournis :
▪ L’iCS-ECAT (Contrôleur esclave EtherCAT)
▪ L’iCS-ENET (Contrôleur Ethernet autonome)
iCS-ECAT
(EtherCAT contrôleur esclave)Aperçu du produit - i4H (EtherCAT) Spécifications
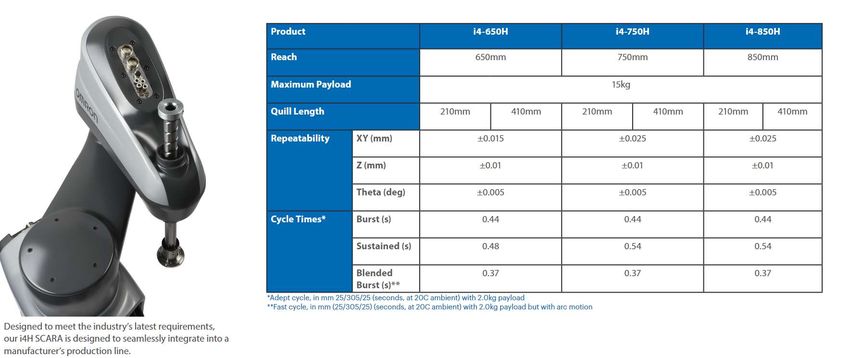
Aperçu du produit - i4H (EtherCAT)
Les differences sur les modèles
3 gammes, 5 variations, 2 longueurs Z différentes et 3 options de montage
Size i4-650H i4-750H i4-850H
Mount Floor, celling, wall* Floor, celling, wall* Floor, celling, wall*
210 mm Z Standard Jan’21
410 mm Z Option
IP65 Option
Cleanroom Option
ESD Option
Food Grade Option
*Le montage mural nécessite une option de support mural supplémentaire pour être lancé en juin 2021Aperçu du produit - i4H (EtherCAT)
Résumé des caractéristiques
▪ SCARA haute performance : bonne répétabilité pour l’assemblage de
précision
▪ Montages sur base/table de modèle standard, avec le support en option
de montage de mur et la version inversée pour le montage au plafond.
▪ Empreinte au sol minimaliste avec contrôleur embarqué
▪ Portée de 650, 750 mm et 850 mm
▪ 210 ou 410 mm pour l’options
de l’axe Z
▪ Charge utile maximale 15 kg
▪ Poids entre 50.4 et 51.6 Kg
▪ Logiciel Sysmac Studio V1.44Aperçu des Scara – Les références
Les références intègrent :
▪ Bras robot SCARA RS4-206XX0X
▪ Contrôleur eCAT iCS
▪ Câble XSYSTEM w/ PORT ENET, câbles avec
jumpers (13323-100)
▪ Kit façade avant (92546-10358)
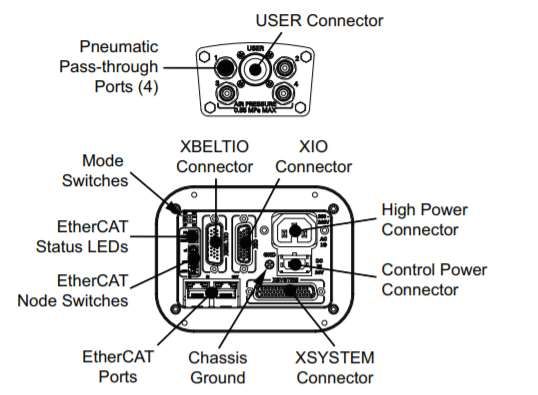
Exemple BOMComposants mécaniques Utilisez l’image ci-dessous pour identifier les composants mécaniques du robot et les panneaux d’interface du robot :
Façade de commande
La façade de commande est un dispositif qui
fournit la télécommande et les fonctions Sélection de
mode
d’état lorsqu’il est monté une distance de Puissance élevée
Interrupteur
Indicateur
sécurité à l’extérieur de l’espace de travail du
robot. Le panneau avant fournit les fonctions Puissance de
contrôle
suivantes. Indicateur
▪ Réglage du mode robot en mode manuel ou LED
automatique.
▪ Indiquant l’état de puissance de puissance et de
Puissance élevée
puissance de contrôle du robot. Activer le bouton Bouton
▪ Activation du robot High Power. d’arrêt
d’urgence
▪ Activation d’un arrêt d’urgence et désactivation
du robot High Power.Commande d’interface primaire
Le connecteur UTILISATEUR fournit des Les ports de passage Pneumatique
signaux électriques de passage du fournissent des lignes aériennes de
panneau d’interface primaire au panneau passage du panneau d’interface primaire
d’interface secondaire (généralement au panneau d’interface secondaire. Les
utilisés pour la détection et le contrôle de ports de passage pneumatiques sont
l’outillage de bout de bras). généralement utilisés pour le contrôle de
l’outillage en bout de bras.
Le connecteur XBELTIO donne
accès aux entrées encodeur 1 Le connecteur XIO donne accès
et 2, expansion I/O, capteur de à l’I/O intégré du robot (12
force et RS-232 entrées, 8 sorties).
Le connecteur XSYSTEM fournit
Le port EtherCAT fournit des des connexions à des
communications pour la équipements externes tels
programmation et la qu’un panneau avant, un
configuration. pendent Teach et des
dispositifs de sécurité fournis
par l’utilisateur
La commande d’interface primaire est situé sur la base du robot.Câble XSYSTEM ▪ Ce câble est fourni avec le robot ▪ Le câble XSYSTEM fournit des connexions à des équipements externes tels que la façade avant, un pendent Teach et des dispositifs de sécurité fournis par l’utilisateur.
Câble adaptateur XBELTIO
▪ Le câble XBELTIO donne accès aux signaux
suivants :
▪ Entrées d’encodeur 1 et 2
▪ Capteur de force
▪ RS-232 (en)
▪ Extension I/O
Les unités IO Blox sont disponibles pour
augmenter la capacité I/O du robot et peuvent
être connectées au câble XBELTIO
▪ Chaque unité offre 8 entrées et 8 sorties.
▪ Jusqu’à 4 unités IO Blox peuvent être ajoutées
au robot.
IO BloxCâble XIO Le câble XIO donne accès à l’I/O intégré du robot (12 entrées, 8 sorties).
Contrôle & connecteur de puissance
Le connecteur HIGH-POWER est utilisé pour
fournir 200-240VAC aux amplificateurs servo
internes.
Lorsque l’alimentation est fournie à ce
connecteur et que la haute puissance a été
activée, le robot est prêt à se déplacer.
Un connecteur d’accouplement est fourni
avec le robot.
S8VKS-24024
24VDC / 240W
Le connecteur CONTROL POWER est utilisé pour fournir
24 VDC (5A) aux circuits logiques des robots.
Lorsque l’alimentation est fournie à ce connecteur, le
robot démarre et des fonctions de contrôle telles que la
programmation et la configuration sont possibles.
Un connecteur d’accouplement est fourni avec le robot.Interface de raccordement secondaire
▪ Le connecteur USER fournit des signaux électriques de passage de la
base du robot jusqu’à l’extrémité du bras. Les signaux électriques de
passage sont généralement utilisés pour la détection et le contrôle de
l’outillage en bout de bras.
▪ Le connecteur Tool EtherCAT fournit des communications EtherCAT
aux appareils fournis par l’utilisateur qui peuvent être montés sur le
lien externe ou l’outillage en bout de bras
Connecteur utilisateur ➔
Tous les signaux qui passent
à travers les connecteurs
USER ne sont pas associés à
des commandes de robot,
des circuits d’arrêt d’urgence
ou de la puissance du robot.
Le panneau d’interface secondaire est situé au-dessus de la liaison externeSystème de sécurité
Exemple de diagramme de connexion Multi-Robot :
Contrôleur intégré
Robot 1 Robot 2
CPU de sécurité
Pour plus d’informations sur la sécurité, veuillez consulter l’annexe 2 jointe à la fin de cette présentationAccessoires
▪ Mêmes accessoires que eCobra actuel (pendent, façade avant, kit de
suivi du convoyeur, caméras, IO Blox).
▪ Sauf les câbles firewire et Smart Controller EX.
Note. - Un kit de
soufflets, supports de
montage d’appareil
photo, et kit solénoïde
sera ajouté peu de temps
après la première version
SmartController EX (TBD)Accessoires
Un support de montage de caméra peut être utilisé pour attacher une caméra à la liaison
extérieure du robot. Ceci est fixé au bas de la liaison extérieure, près de la sortie de l’axe Z.
Lors de l’fixation d’une caméra Basler ou Sentech, une plaque d’adaptateur doit être utilisée
22295-000
pour attacher l’appareil photo au support de montage de la caméra. 18908-000
Une plaque d’adaptation est disponible pour monter le robot sur une surface de montage
conçue pour un type de robot eCobra 600/800. Cet adaptateur est placé entre le robot et la 21636-000
surface de montage et adapte les trous de montage sur la surface pour s’adapter à la bride de
montage robot.
Un support de montage mural est disponible lorsque le robot doit être monté sur une surface 20089-000
verticale. Ce support est compatible avec toutes les configurations de robot.
Soutien sw prévu au 1er trimestre-FY21Accessoires
Contrôleur d’application IPC
▪ La version I4-H EtherCAT peut être utilisée ensemble pour le contrôleur
d’application IPC (AC1-152000)
Le contrôleur intégré est toujours le
maître EtherCAT pour i4-H
▪ Cela signifie une compatibilité totale avec Vision Manager et Pack
ManagerProgrammation
Intégré (EtherCAT)
▪ Programmable via IEC 61131-3, ainsi que le reste des
produits Omron SYSMAC
▪ fonctionnalité et programmation eV+3.0 préservées
▪ Programmation basée sur les assistants pour la vision
et l’emballage (plus à venir)
▪ Sysmac Studio V1.44 (i4H, IC DB, iX3, support iX4)
disponible via Auto-Update à partir du 6 janvierValeur ajoutée pour les clients
i4H: Nouvelle génération
de robot SCARA
Maximiser la
Performances de haut Intégration simple disponibilité
niveau Les fonctionnalités de
Pour les applications Nouveau contrôleur maintenance interactive
exigeant des charges utiles EtherCAT/Ethernet intégré intégrées éliminent les
élevées dans la plate-forme Omron temps d’arrêt imprévus
Une famille de produits, plus de 100 variantes de produits, une vision d’usinei4-H SCARA - Avantages
A B C
Hautes performances Intégration simplifiée Maximiser la disponibilité
B
Simplifiez la conception d’outils
complexes en utilisant le module
Omron EtherCAT connecté
directement sur le bras robotisé.
C
Maintenance interactive
en tant que fonction
A intégrée hors du boitier
B
Nouvelle génération de technologie de
contrôleur embarquée.
Temps de cycle → Moins d’espace
Charge utile lourde rapide → Moins d’entretienPerformances de haut niveau Hautes
performances
Fonctionnalités avancées
Disponible en longueurs de portée 650, 750, 850mm
▪ Le robot i4H SCARA offre une charge utile et des performances plus lourdes
par rapport à son prédécesseur.
▪ Charge utile plus élevée, inertie, et temps de décantation inférieur par
rapport à ses concurrents.
▪ Axe Z plus long par rapport aux modèles eCobra précédents.
210 / 410 mm 210mmIntégration simplifiée
Intégration simple
Connectivité EtherCAT & Ethernet
Contrôleur intégré Sysmac via EtherCAT
Solution mono-multi-robots, EtherCAT
Simplifiez l’évolutivité en permettant
des ensembles de robots facilement
déployés et synchronisés via le
contrôleur NJ. La connexion directe aux
NJ permettra de déployer et de
synchroniser facilement plusieurs
robots tout en réduisant la complexité
et le temps de programmation et la
mise en place.Intégration simplifiée
Intégration simple
Intégration simple par application
Montages au sol/table avec des modèles standards, avec le support en
option de montage de mur et la version inversée pour le montage au
plafond.
Dans un deuxième temps d’ici avril 2021, nous commercialiserons des
versions ip65, CR & ESD et Food Grade. NSF-H1
IP65 Available Available
Available AvailableMaximiser la disponibilité Maximiser la
disponibilité
Affichage LCD et anneau lumineux LED
L’indicateur d’anneau lumineux LED autour de
l’articulation 1 du robot fournit un état visuel du
robot. Les indications LED et les états de robot
associés sont décrits ci-dessous.
L’écran LCD sur la base du robot fournit les messages
suivants:Avantages pour les clients utilisateurs Évaluation plus rapide (Intégrateur système et équipementier) Calcul du retour sur investissement précoce et validations de conception grâce à la simulation ▪ Les améliorations de changement des futurs produits peuvent être validées par simulation. ▪ Le coût de l’investissement peut être calculé à l’avance. ▪ Estimation du temps de cycle. ▪ Améliorer la conception et la planification (Il est moins coûteux de modifier un modèle 3D pendant la phase de conception que de modifier la station physique pendant la phase de mise en œuvre).
Avantages pour le client
Temps de mise en service inférieur (Intégrateur système & OEM)
▪ Moins de câblage grâce au contrôleur à l’intérieur
▪ Réduire le temps d’intégration avec la programmation hors ligne
I. Moins vous passez de temps sur place, mieux c’est. Surtout en ce
moment!
II. Programmez autant que possible dans le confort de votre bureau ou de
votre maison.
▪ Les modules Xpert réduisent le temps d’intégration et
la courbe d’apprentissage.
▪ Réduire la charge de conception mécanique
et électrique en imitant les cellules complètes
à travers la plate-forme Sysmac.Avantages pour le client Coût de possession et d’exploitation inférieur (utilisateurs finaux) ▪ La synchronisation en temps réel entre le robot et le PLC (commande de mouvement et les autres appareils ECAT) améliore la productivité. ▪ Recipe Manager facilite les modifications et minimise le changement de produit au fil du temps. ▪ La fonctionnalité SQL permet de connecter et de collecter dans une base de données toutes les informations sur les robots et les appareils d’EtherCAT. ▪ Une petite empreinte permet d’économiser de l’espace dans l’usine (Espace = Or) ▪ Maintenance facile : Maintenance interactive avec fonctions de service intégrées pour éviter les temps d’arrêt imprévus.
Omron Avantage concurrentiel
Avantage concurrentiel Scara i4-H ▪ La performance moyenne est supérieure à nos principaux concurrents ▪ Le portefeuille et la gamme d’applications sont très importants. ▪ La combinaison avec Sysmac Integrator Controller le rend unique et maximise la valeur client à un niveau qui dépasse les attentes des clients.
Avantage concurrentiel Sysmac IC + i4-H ▪ Sysmac IC permettra de déployer et de synchroniser facilement plusieurs applications robotisées tout en réduisant la complexité de configuration, le temps de programmation, le temps de mise en service et maximiser les performances. ▪ Facile à déployer des applications haut de gamme avec des modules logiciels et un gestionnaire d’applications ▪ Facile à utiliser : Fonctionnalités de maintenance interactives avec des fonctions de service intégrées maximisant la disponibilité.
Avantage concurrentiel ▪ Programmez et intégrez facilement l’i4H dans votre Machine, aux côtés du reste des appareils OMRON (vision, mouvement, IO, sécurité, capteurs, ...), à l’aide du logiciel de programmation One d’OMRON, Sysmac Studio, à l’aide de One Controller Sysmac IC. ▪ Le logiciel Sysmac est capable de simuler l’ensemble de votre machine/ligne, ce qui réduit le temps de développement, le temps de dépannage et vous permet d’atteindre des niveaux très élevés de synchronisation et de performance entre tous les appareils, robots multiples ou robots et servos, tous connectés à l’aide d’Un Réseau EtherCAT.
Avantage concurrentiel Omron
Permettre aux systèmes de fabrication d’être véritablement intégrés et
flexibles et qui tirent parti de l’interaction entre les humains et les machines
R: Robotique
O: Drive S: Sécurité
I: Détection
L: ContrôleServices
Les services suivants doivent être promus comme complément de
l’offre dès la première visite au client.
▪ Prolongation de la garantie : 24 mois après l’enregistrement du robot
▪ Contrats d’entretien
▪ Service de location
▪ Services PoC (Proof of Concept)
▪ Services de sécurité (évaluation des risques, ...)
▪ Réparation interne
▪ Location de robots (lorsque le client n’a pas de système de sauvegarde et a
besoin de réparer son robot)
▪ Pièces détachéesVous pouvez aussi lire