Projet : contrôle automatique - de l'écoute d'un voilier (modélisme) - Moodle
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
APP Périphérique
Projet : contrôle automatique
de l'écoute d'un voilier (modélisme)
Plan :
Présentation du thème « contrôle automatique de voile »
Petit lexique sur le thème de la voile
Allures d'un voilier
Découpage fonctionnel du banc d'essais
Les capteurs & actionneurs du banc d'essais
Spécifications
Slide 1
APP Périphérique Présentation du thème
« contrôle automatique de voile »
Bateau de modélisme télécommandé
40- 41 Mhz
Télécommande
écoute
Récepteur HF
servo-moteur
batterie
Slide 2APP Périphérique Présentation du thème
« contrôle automatique de voile »
Système réel voulu (navigation en eau):
Girouette
40- 41 Mhz
Télécommande
écoute
Récepteur HF
servo-moteur
Carte STM32
batterie
Slide 3APP Périphérique Présentation du thème
« contrôle automatique de voile »
Système réel voulu :
Seuls les éléments influants sur le
La girouette donne la direction du
bordage automatique de voile vent par rapport à la proue du bateau
sont montrés (Girouette – STM32 - Girouette Le servo-moteur de tension d'écoute
Servo-moteur d'écoute - batterie) règle l'angle de la voile en
conséquence :
Angle Loi de Angle
girouette commande voile θ
écoute α
servo-moteur
Carte STM32
batterie
Slide 4APP Périphérique Présentation du thème
« contrôle automatique de voile »
Système réel amélioré
(navigation en eau):
En plus de la commade automatique
des voiles, le STM32 sera capable 40- 41 Mhz
de renvoyer au pilote des informations
(angle du vent apparent, Télécommande
angle de roulis 433 Mhz
niveau de batterie...) Récepteur HF LCD
écoute
Pupitre de réception
Emetteur HF
servo-moteur
Série asynchrone
Carte STM32
batterie
Slide 5APP Périphérique Présentation du thème
« contrôle automatique de voile »
banc d'essais (ventilateur non représenté)
Rotation libre de l'axe : le
bateau peut rouler (giter)
Plateau pivotant,
motorisé
(moteur à
courant continu
+ réducteur)
Slide 6APP Périphérique
Petit lexique du moussaillon
proue
BABORD TRIBORD
c
poulie
fo
ile
vo
d-
écoutes
an
Gr
Bras commandé
θ , Angle d'ouverture
de voile
Slide 7APP Périphérique
Petit lexique sur le thème de la voile
Mât
Tribord = droite du bateau
dans le sens de déplacement
Babord = gauche du bateau
dans le sens de déplacement
Grand-voile Foc
Poupe Proue
pont
coque
Safran de
gouvernail
Quille
Slide 8APP Périphérique
Petit lexique sur le thème de la voile
la drisse de grand-voile
gréement
le point
la drisse de foc
de drisse
e)
ièr
a rr
an
ub
(h a
as
ta r
Grand-voile
pa
le
le point Foc
découte
la bôme de foc
i le
vo
n d- le hale-bas Pont du bateau
ra éco
eg ut e pivot du foc
ted la bôme de grand-voile le point d'amure du
o u fo c
éc
Slide 9APP Périphérique
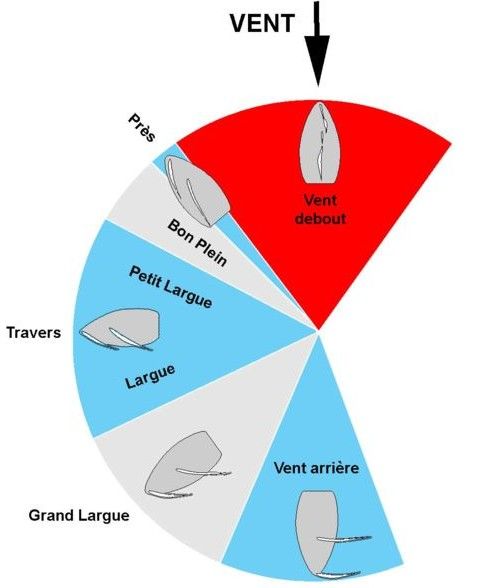
Allures
Le bateau ne peut pas remonter au vent (vent
debout)
A partir d'un angle α de 45° environ, la navigation
est possible (près serré). Les voiles sont alors
bordées au maximum ( θ = 0°)
Au fur et à mesure que l'angle α augmente (le
α bateau descend le vent), les voiles s'ouvrent de plus
en plus jusqu'à atteindre 90° en vent arrière.
Slide 10APP Périphérique
Découpage fonctionnel du banc d'essais
accéléromètre
Angle de roulis Servo-
Gestion bateau moteur Ecran Affichage
Carte LCD messages
Codeur
incrémental STM32 + Tendeur voile
carte de
commande UC
girouette Module Gestion
PIC?
RF messages
C167?
Accu
Emetteur asynchrone
7V2
433MHz
Module RF
Module Récepteur
Batterie Récepteur Moteur cc RF 433MHz
télécommande
40 / 41 MHz Rotation table
Pupitre pilote
Légende Embarqué sur Instrumentation pour Amélioration système
système réel (eau) bateau de table (retour d'informations)
Slide 11APP Périphérique
Les capteurs & actionneurs du banc d'essais
La télécommande de modélisme (40/41MHz) Module RF
4
Récepteur
télécommande
Période fixe, 20 ou 25ms, selon modèle 40 / 41 MHz
L'information transmise est contenue dans la durée de l'impulsion
Valeur mini 1ms
Valeur neutre 1,50 ms
Valeur maxi 2,0ms
Tension d'un
canal 1ms à 2.0ms environ
5V
20 ms
NB : toujours brancher la télécommande avant le
récepteur
Slide 12APP Périphérique
Les capteurs & actionneurs du banc d'essais
Le moteur à courant continu Moteur cc
4
Rotation table
Variation de vitesse :
Q4 et Q5 forment un push-pull pour piloter le
MOS de puissance.
D1 est la diode dite de « roue libre ». Elle
prolonge la circulation du courant moteur quand le
MOS Q2 est coupé (bloqué)
Structure (MOS + Moteur + Diode) de hacheur
simple quadrant : tension & courant moteur sont
positifs (impossibilité d'inverser la vitesse,
impossibilité de freiner)
Slide 13APP Périphérique
Les capteurs & actionneurs du banc d'essais
Le moteur à courant continu Moteur cc
4
Rotation table
Gestion du sens :
La ligne PWM contrôle toujours la tension
présentée sur l'induit du moteur (bornes de la diode)
L'interrupteur à 2 voies, S1, définie le sens :
S1 en haut : le courant (provenant du +12V)
circule dans le moteur de A vers B
S1 en bas : le courant circule dans le moteur de
B vers A
Slide 14APP Périphérique
Les capteurs & actionneurs du banc d'essais
Le moteur à courant continu: schéma complet Moteur cc
4
Rotation table
La gestion de sens se fait
par l'intermédiaire d'un
relais.
Slide 15APP Périphérique
Les capteurs & actionneurs du banc d'essais
Le servo-moteur
Servo-
3 moteur
C'est un actionneur qui reçoit 3 fils:
+5V L'actionneur est constitué
0V d'un corps et d'un disque
Commande PWM « servo » mobile en rotation. Un bras
vissé sur le disque permet de
Tension d'un tirer sur l'écoute donc de
canal 1ms à 2.0ms environ border la voile
5V
éc
o
ut
e
20 ms
L'angle (la position) du bras est une fonction affine de la
durée de l'impulsion (les extrema angulaires sont à vérifier
sur site)
Slide 16APP Périphérique
Les capteurs & actionneurs du banc d'essais
La girouette Codeur
3
incrémental
C'est un codeur incrémental. Il permet de
donner des informations d'angle ou de position
relatives.
Détecteur A
Principe général: Pistes en quadrature (voies
Détecteurs : A & B) : possibilité de
LED +
Photodiode + repérer le sens de
traitement déplacement
Déplacement
du disque
Détecteur B
5V ChA D Q Sens
Voie A
t ChB Ck
Voie B
t Exemple de
discriminateur de sens
Slide 17APP Périphérique
Les capteurs & actionneurs du banc d'essais
La girouette Codeur
Codeur utilisé : AEDB-9140 (Agilent) 3
incrémental
360 périodes sur 1 tour sur chaque voie
3 canaux : A ,B et I(ndex) Electronique de traitement
Slide 18APP Périphérique
Les capteurs & actionneurs du banc d'essais
La girouette Codeur
Dans le cas de ce capteur, ce ne sont pas les pistes qui incrémental
3
sont en quadrature, mais la multitude de capteurs
optiques qui créent la quadrature.
Pistes en quadrature (voies
A & B) : possibilité de
repérer le sens de
déplacement
Index, pour un repérage
absolu
Slide 19APP Périphérique
Les capteurs & actionneurs du banc d'essais
2
L'accéléromètre accéléromètre
C'est un accéléromètre 2 axes
But : mesurer l'inclinaison par lecture de
l'accélération de pesanteur sur les axes X et Y
Principe :
pont
quille
X
g Y
Bateau vu de face
Slide 20APP Périphérique
Les capteurs & actionneurs du banc d'essais
Le module RF de communication
Module
1
RF
Il permet d'établir une communication entre le
bateau et le pilote. Le type d'information transmise
est :
Niveau de tension batterie
Angle de roulis
...
Il travaille à une fréquence porteuse de 433 Mhz
Le protocole de transmission est classique :série
asynchrone, sans parité, 1 seul bit de stop, 9600
bauds
Slide 21APP Périphérique
Spécifications
Contrôle des voiles (foc et grand-voile)
A partir de l'angle du vent par rapport à la proue, α, (allure du bateau), imposer l'angle optimal des voiles, θ.
On propose la loi suivante :
A l'intervalle α ∈ [45° , 180°] correspond, suivant une loi affine, l'intervalle θ ∈ [0° , 90°], ceci
bien sûr pour les deux sens de rotations babord et tribord.
A l'intervalle α ∈ [0° , 45°] on ferme totalement l'angle des voiles, θ = 0°.
Contrôle du plateau
L'utilisateur doit pouvoir faire tourner le bateau (babord, tribord) à partir de la télécommande de modélisme.
Il doit y avoir proportionnalité entre la position du manche de commande et la vitesse de virage.
Surveillance du roulis du bateau et de la batterie
Si un angle (entre la verticale et l'axe du mât) dépasse 45°, les voiles ne doivent plus être bordées. Un
message doit être envoyé via la liaison 433MHz.
Si la tension de batterie a perdu 20% de sa valeur initiale, un message doit être envoyé via la liaison
433MHz.
Slide 22Vous pouvez aussi lire