VOYAGE AU CŒUR DES DONNÉES TEMPORELLES - de l'IGN 28es Journées de la Recherche
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
VOYAGE AU CŒUR
DES DONNÉES TEMPORELLES
28 es Journées de la Recherche
de l’IGN
18 et 19 avril 2019
http://recherche.ign.fr
#JRIGN2019
Code WIFI : Amphi Picard
https://authentification.ensg.eu
Identifiant : Forum
VOYAGE AU CŒUR
Mot de passe : Recherche2019
DES DONNÉES TEMPORELLES
Les 28es Journées de la Recherche de l’IGN
Marne-la-Vallée, 18 et 19 avril 2019
Session d’ouverture
Jeudi 18 avril 2019
Amphithéâtre IFSTTAR
09h15 . . . . . Ouverture des Journées de la Recherche.
S. LATARGET, Directeur général adjoint de l’IGN.
09h35 . . . . . Time Machine : Les big data du passé pour le futur de l’Europe. (p. 6)
F. KAPLAN, Directeur de Digital Humanities Laboratory (DHLAB), EPEFL.
................. 10h35 Pause
11h00 . . . . . Tout est question de temps.
F. FUCHS, Délégué scientifique et technique de l’IGN.
11h15 ..... Présentation de l’UMR LaSTIG.
M. PIERROT-DESEILLIGNY, Chef de l’UMR LASTIG.
11h35 . . . . . Présentations des posters. (p. 34-35)
................. 12h15 - 14h00 Buffet (Salle polyvalente)
Posters (Salle polyvalente et Hall Sud)
Code WIFI : Amphi IFSTTAR
Utiliser le réseau «Conférence»
Identifiant : hbaweuhb
Mot de passe : z6gAuwppzZ
2 3
JEUDI 18 AVRIL 2019 JEUDI 18 AVRIL 2019
Amphithéâtre IFSTTAR Amphithéâtre Picard
28es Journées de la Recherche de l’IGN 28es Journées de la Recherche de l’IGN
Base de données et processus temporels Analyses des risques humains et environnementaux
14h00 . . . . . Modérateur : 14h00 . . . . . Modérateur :
A. Le Bris. L. Landrieu.
14h10 . . . . . Venise Time Machine (p. 7) 14h10 . . . . . Polluscope : Observatoire participatif pour la surveillance de l’exposition
I. di Lenardo. individuelle à la pollution de l’air en lien avec la santé. (p. 13)
M. Chachoua, S. Srairi.
14h40 . . . . . Géoréférencement automatique d’images aériennes anciennes. (p. 8)
S. Giordano, A. Le Bris. 14h40 . . . . . Les formes possibles d’un îlot urbain : contraintes géométriques et
performance énergétique. (p. 14)
15h10 . . . . . Retour sur un exercice d’extraction de données géo-historiques de la Carte de France
P. Chapron.
de Cassini, 1750-1789. (p. 9)
J. Perret, S. Baciocchi, J. Chadeyron, P. Cristofoli, B. Duménieu. 15h10 . . . . . Géocubes à l’École. (p. 15)
O. Martin, J.-P. Souchon.
................. 15h40 Pause
................. 15h40 Pause
16h05 . . . . . Création d’une base de connaissances sur les redécoupages administratifs durant
la Révolution française : l’exemple des paroisses constitutionnelles. (p. 10) 16h05 . . . . . Signature gravitationnelle du séisme de Tohoku (11 mars 2011) dans
A. Keller, N. Abadie, B. Duménieu, S. Baciocchi, E. Kergosien. les géoïdes GRACE. (p. 16)
I. Panet, S. Bonvalot, C. Narteau, D. Remy, J.-M. Lemoine.
16h35 . . . . . Exploration des dimensions spatiale et temporelle de l’imagerie satellite pour
la classification de parcelles agricoles. (p. 11) 16h35 . . . . . Détection du vandalisme dans l’information géographique volontaire par
V. Sainte-Farge-Garnot, L. Landrieu, S. Giordano, N. Chehata. apprentissage automatique. (p. 17)
Q. T. Truong, G. Touya, C. de Runz.
17h05 . . . . . Homogénéisation de séries temporelles GNUSS du contenu intégré en vapeur d’eau
avec le package R GNUSSseg. (p. 12) 17h05 . . . . . Des expériences en réalité augmentée, embarquées sur smartphone pour
A. Quarello, O. Bock, E. Lebarbier. apprendre un territoire dans un contexte ludique. (p. 18)
B. Grelaud.
................. 17h35 Fin de la première journée
................. 17h35 Fin de la première journée
4 5
A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
jeudi 18 avril 09h35 jeudi 18 avril 14h10
Session d’ouverture Base de données et processus temporels
Time Machine : Les Big Data du passé pour le futur de l’Europe. Venice Time Machine.
F. Kaplan I. di Lenardo
Director, Digital Humanities Laboratory (DHLAB), EPFL Digital Humanities Laboratory (DHLAB), EPFL
Le projet Time Machine, présélectionné 1. Le développement des nouveaux axes La Venice Time Machine est un pro- Des milliers de sources primaires et
par la Commission européenne comme de recherche en intelligence artificielle et gramme de numérisation et de recherche secondaires ont été compilées pour
l’une des six initiatives à grande échelle technologie de l’information nécessaire lancé en 2012 par l’École Polytechnique créer un premier modèle 4D de la ville
(LSRI) pour les dix prochaines années, pour le traitement massif des données Fédérale de Lausanne (EPFL) et l’univer- de Venise, mettant en lumière le tissu
pousse les frontières de la recherche culturelles, géographiques et patrimo- sité Ca’Foscari. En six ans, des millions urbain et social sur une période de plus
scientifique dans le domaine des techno- niales ; de pages ont été numérisées à l’Archive de 1 000 ans. Les résultats du projet ont
logies de l’information et la communication, 2. La construction d’une infrastructure d’État de Venise et à la Fondation Giorgio donné lieu à une exposition à la Biennale
l’intelligence artificielle et les sciences paneuropéenne ancrée sur un modèle de Cini. Ces documents sont analysés par d’architecture de Venise en 2018 et le
humaines et sociales. Son ambition est développement durable, sur la base de des systèmes d’extraction et d’analyse projet prépare maintenant la numérisa-
de développer les sciences et les franchises (les Time Machines locales) automatique développés par le labora- tion de la ville dans son ensemble de
technologies pour l’extraction massive et l’organisation des communautés parti- toire en Humanités Numériques de l’EPFL façon à doter la municipalité d’un
de « Big Data du passé », un système d’in- cipant à son développement et exploitation ; et entraînés sur des annotations d’expert outil unique permettant d’envisager
formation distribué cartographiant en paléographie et en histoire de l’art. son futur à la lumière des données
3. Le développement de plateformes ap-
l’évolution sociale, culturelle et géogra- Leurs contenus textuels et iconogra- denses de son passé.
plicatives, notamment dans les domaines
phique de l’Europe. Cette infrastructure de phiques sont désormais accessibles via
des médias et de la culture, du tourisme,
numérisation et de traitement permettra un moteur de recherche ouvert.
des “smart cities” et de l’utilisation des
à l’Europe de transformer sa longue
sols et des politiques territoriales.
histoire, et sa richesse linguistique et
culturelle, en une ressource économique 4. Le développement du cadre structurel
et sociale vivante permettant d’inventer et légal permettant le développement du
ensemble un futur commun. Pour réaliser projet, le transfert technologique et un
ses objectifs, le projet Time Machine est ancrage durable en Europe.
structuré en quatre piliers :
6 7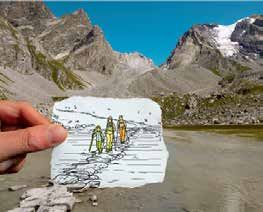
A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
jeudi 18 avril 14h40 jeudi 18 avril 15h10
Base de données et processus temporels Base de données et processus temporels
Géoréférencement automatique d’images aériennes anciennes. Retour sur un exercice d’extraction de données géo-historiques
S. Giordano , A. Le Bris
1 1 de la Carte de France de Cassini, 1750 - 1789.
Univ. Paris-Est, LASTIG STRUDEL, IGN, ENSG, F-94160 Saint-Mandé, France
1
J.Perret1, 3, S. Baciocchi1, J. Chadeyron2, P. Cristofoli1, B. Duménieu1
1
EHESS, CRH
En France, plus de 3 millions de pho- images. Nous proposons une méthode
2
Université de Clermont-Ferrand (UCA)
tographies aériennes anciennes sont de géoréférencement fin en deux étapes.
³
LASTIG STRUDEL, IGN, ENSG, Univ. Paris-Est
disponibles sur Remonter le temps. Leur Des orthoimages et MNS approchés sont
exploitation offre à des thématiciens la d’abord calculés à partir de métadonnées En construisant un système d’informa- d’un poster, les principales propriétés
possibilité de suivre finement les évolu- basiques associées aux images d’archives. tion géographique (SIG) dédié à l’étude cartographiques. Mais c’est aussi par
tions du paysage à des résolutions Une détection automatique de points de l’histoire du territoire français, nous la méthode mise en œuvre pour effec-
spatiales et sur des périodes de temps d’appui, robuste aux évolutions tempo- avons extrait des informations spatiales tuer ce travail que nous allons nous
inenvisageables jusqu’à présent. Ces relles du paysage, est ensuite réalisée en de la Carte de France de Cassini sous la intéresser. En effet, la mise en pratique
images sont pour l’instant seulement comparant la solution approchée à forme de données vecteur. Suite à un d’une approche résolument ouverte,
accompagnées d’informations très gros- une référence récente. Le géoréférence- premier travail d’analyse de la carte et interdisciplinaire et collaborative ouvre
sières de géolocalisation (~100m) ne ment fin est finalement produit avec une de construction d’une base de données des possibilités qui nous semblent
permettant pas de réaliser ces analyses. méthode d’aérotriangulation utilisant ces nationale principalement focalisée sur le nouvelles pour la construction de don-
Un géoréférencement fin (~1m) et la points d’appui. Nos expérimentations sur réseau routier et les zones urbanisées, un nées géo-historiques mais interrogent en
génération d’orthoimages et de Modèles plusieurs zones d’étude (urbaine et rurale) second travail, plus minutieux, a été mené permanence les pratiques des différentes
Numériques de Surface (MNS) est pos- montrent la validité de notre approche et sur la feuille numérotée 52 en collabora- disciplines impliquées, de la modélisa-
sible avec l’utilisation d’une chaîne de la bonne qualité des résultats, permettant tion avec l’université de Clermont-Ferrand. tion des données au rapport aux sources
traitements photogrammétriques mais ainsi l’exploitation des images anciennes Ce travail a notamment permis de mieux primaires en passant par les pratiques de
nécessite la saisie manuelle de points pour de nombreux cas d’application thé- comprendre le contenu de la carte et d’en description du travail effectué.
d’appui. Le principal verrou réside dans matique. Ces travaux s’inscrivent dans le restituer, notamment sous la forme
l’identification de ces points en densité contexte des projets ANR HIATUS (2019-22)
suffisante pour pallier les défauts des et FET Flagship Time Machine.
Fig.1 (a) une vue de la Carte de France de Cassini originale (feuille 52, 1759-1777).
Exemple de production automatique
d’orthoimages et MNS anciens sur la
commune de Fréjus (83).
Fig.1 (b) les données extraites cartographiées avec le style «Cassini» (2019).
8 9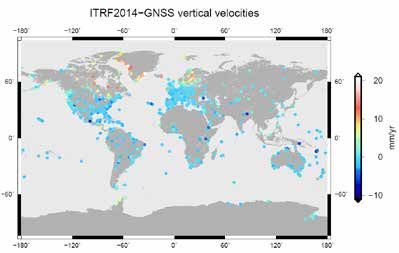
A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
jeudi 18 avril 16h05 jeudi 18 avril 16h35
Base de données et processus temporels Base de données et processus temporels
Création d’une base de connaissances sur les redécoupages Exploration des dimensions spatiale et temporelle de l’imagerie
administratifs durant la Révolution française : satellite pour la classification de parcelles agricoles.
l’exemple des paroisses constitutionnelles. V. Sainte-Farge-Garnot, L. Landrieu, S. Giordano, N. Chehata
A. Keller , N. Abadie , B. Duménieu , S. Baciocchi , E. Kergosien
1 2 3 3 4. Univ. Paris-Est, LaSTIG STRUDEL, IGN, ENSG, F-94160 Saint-Mandé, France
1
École Navale, Lanvéoc
2
LASTIG STRUDEL, IGN, ENSG, Univ. Paris-Est, Saint-Mandé Le recensement des cultures produites En effet, les réseaux de neurones artificiels
3
CRH, EHESS, Paris sur l’ensemble des parcelles agricoles ont prouvé leur capacité à exploiter la
4
GERiiCO, Université Lille 3, Villeneuve-d’Ascq, Lille du territoire français permet chaque année structure spatiale de données grâce aux
l’attribution des subventions aux agricul- architectures convolutionnelles ainsi que
teurs, ainsi que diverses autres applications la structure temporelle avec des archi-
Si les ressources cartographiques et icono- de l’Assemblée Constituante. Ce travail pour des problématiques de gestion en- tectures récurrentes.
graphiques anciennes sont de plus en plus propose une chaîne de traitement semi-au- vironnementale. Cette cartographie est La classification de parcelles agricoles
intégrées dans des Systèmes d’Information tomatique pour créer une base de connais- actuellement effectuée à la main par les sur des séries temporelles d’images
Géographique (SIG) historiques pour sances géoréférencées sur la réorganisation agriculteurs. L’arrivée dans les dernières satellites (STIS) nécessite le développe-
servir de référentiels géohistoriques, peu du maillage paroissial, structurée sous années de satellites d’observation four- ment d’architectures hybrides capable
de travaux en revanche se sont intéressés forme de graphe spatio-temporel conforme nissant des données publiques à des d’exploiter la structure spatio-temporelle
à l’extraction d’information géographique au modèle Snapshot et mettant à profit résolutions spatiales et temporelles de de ce type de données. Afin de créer les
à partir de textes anciens pour alimenter de les standards du Web de données pour la plus en plus fines, permet d’envisager architectures les plus pertinentes, nous
tels référentiels. Pourtant, certains textes structuration des connaissances extraites une automatisation, au moins partielle, explorons l’importance relative des
offrent des descriptions du territoire an- et l’explicitation des connaissances impli- de cette classification. dimensions spatiale et temporelle des
cien et de ses infrastructures très précises cites du texte. Pour y parvenir, les algorithmes d’intel- STIS pour la classification de parcelle à
et détaillées et constituent parfois la seule ligence artificielle dits ”d’apprentissage l’aide de réseaux de neurones artificiels.
source d’information disponible. Les utili- profond” semblent les plus prometteurs.
sateurs désireux de s’y référer doivent
alors découvrir et traiter manuellement ces
archives textuelles, imprimées ou manus-
crites, afin d’acquérir les connaissances sur
l’espace ancien nécessaires à leur analyse.
Ainsi, le remembrement des paroisses
religieuses d’Ancien Régime lors de la mise
en place de l’Église constitutionnelle (1790-
1793) est très précisément décrit dans
les archives des débats et délibérations
Évolution du statut des paroisses
de l’Ancien Régime dans le Puy de
Dôme, extraite des décrets de
l’Assemblée Nationale de 1791.
10 11
A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E P I C A R D
jeudi 18 avril 17h05 jeudi 18 avril 14h10
Base de données et processus temporels Analyses des risques humains et environnementaux
Homogénéisation de Séries Temporelle GNSS du contenu intégré Polluscope : Observatoire participatif pour la surveillance de
en vapeur d’eau avec le Package R GNSSseg. l’exposition individuelle à la pollution de l’air en lien avec
A. Quarello1, 2, O. Bock1, E. Lebarbier2 la santé.
1
IPGP, IGN, ENSG, Univ. Paris Diderot, Sorbonne Paris Cité, M. Chachoua1, S. Srairi2
UMR 7154 CNRS, Paris, France 1
École des Ingénieurs de la Ville de Paris – EIVP
2
AgroParisTech, UMR MIA 518, Paris, France 2
CEREMA
Les séries longues de contenu intégré en proposée. L’application aux données La pollution atmosphérique, aux origines à mesurer l’exposition réelle à l’échelle
vapeur d’eau (CIVE) mesurées par GNSS réelles est également présentée à l’aide diverses, est un défi à relever pour les individuelle. C’est dans ce contexte que
sont affectées par des inhomogénéités des données CIVE quotidiennes de 120 grandes métropoles, en raison des risques s’inscrit le projet ANR POLLUSCOPE.
liées aux changements d’équipements au stations GNSS réparties dans le monde encourus sur la santé et le bien-être Démarré en septembre 2016 pour une
cours du temps. L’homogénéisation de ces pour la période allant de janvier 1995 à des citadins. Les réseaux traditionnels durée de 5 ans, l’objectif de ce projet
séries est une étape cruciale pour leur décembre 2010. La méthode proposée est d’observation de la qualité de l’air, bien est d’étudier l’exposition individuelle
interprétation en termes de tendance et de implémentée dans le package R « GNSSseg » que relativement fiables, sont épars et ren- à la pollution au moyen de dispositif
variabilité climatique. Nous avons développé qui sera disponible sur le site du CRAN. voient des mesures moyennées sur une multicapteurs et de mettre en place une
un algorithme de segmentation dédié à la période assez longue. De plus, ces me- plateforme informatique de collecte et
détection de changements abrupts dans sures ne s’appliquent pas aux environ- d’analyse des informations transmises
la moyenne qui prend en compte un biais nements intérieurs. Afin de compléter par ces capteurs mobiles, mettant en
fonctionnel et une variance hétérogène ces réseaux traditionnels d’observation œuvre des méthodes et outils des
dans les différences entre les observations de la qualité de l’air, divers projets sciences des données et du Big Data. Le
GNSS, et la réanalyse ERA-Interim. Dans récents se sont orientés vers l’utilisa- projet Polluscope implique des partenaires
un premier temps, le nombre de ruptures tion d’une technologie émergente de de disciplines différentes, notamment
étant fixé, il estime de manière robuste la capteurs mobiles connectés ultralégers. les sciences environnementales, la santé,
variance mensuelle, puis de manière itérative Cette technologie vise à multiplier les les géosciences et l’informatique.
successivement : (i) le biais variable et (ii) lieux de mesure de la qualité de l’air et
les positions des points de rupture et les
moyennes du signal.
Dans la deuxième étape, le nombre opti-
mal de ruptures est choisi à l’aide d’une
méthode de sélection du modèle (trois Partenaires :
critères de pénalités sont proposés). Une DAVID (Porteur),
étude de simulations a été réalisée pour AIRPARIF,
évaluer les performances de la méthode Exemple de segmentation sur une série simulée. En rouge, nous CEREMA,
avons le signal périodique et la moyenne estimée, en orange IRENAV,
la moyenne du segment estimée et en pointillé bleu les points
de rupture détectés. EIVP,
EPAR/IPLESP,
ERES/IPLESP,
LSCE.
12 13
A M P H I T H É ÂT R E P I C A R D A M P H I T H É ÂT R E P I C A R D
jeudi 18 avril 14h40 jeudi 18 avril 15h10
Analyses des risques humains et environnementaux Analyses des risques humains et environnementaux
Les formes possibles d’un îlot urbain : contraintes géométriques Géocubes à l’École.
et performance énergétique. O. Martin1, J.-P. Souchon1
P. Chapron
1
LASTIG/ACTE, IGN, ENSG, Univ. Gustave Eiffel, Marne-la-Vallée
LASTIG, STRUDEL, IGN, ENSG, Univ. Paris Diderot, Sorbonne Paris Cité, Paris
L’Institut National de l’Information Géo- résolution/précision des capteurs, notions
graphique et Forestière (IGN) a dévelop- de statistiques... L’ambition est à terme
Les textes réglementaires (Plan Local cas il s’agit donc d’optimiser le volume
pé ces dernières années des géocubes, d’élargir ce réseau à d’autres établisse-
d’Urbanisme) qui encadrent le droit à la de la forme bâtie simulée. Nous nous
capteurs géolocalisés pour l’étude de ments scolaires hors de nos frontières.
construction précisent un certain nombre interrogeons sur la perspective de chan-
l’environnement. Le projet « Géocubes à
de contraintes géométriques sur la ger la fonction objectif, et d’y incorporer
l’École » a pour objectif de faire partager
dimension d’un bâtiment et son place- des mesures morphologiques reliées à la
à un réseau d’écoles en Île-de-France ces
ment sur la parcelle. Pour estimer le volume performance énergétique et de raisonner
avancées scientifiques et de faire contri-
constructible, le simulateur SimPLU3D à deux niveaux : celui de la parcelle indi-
buer les élèves à un projet de recherche
développé à l’IGN procède par une mé- viduelle et celui de l’îlot urbain. Ce chan-
en faisant d’eux des producteurs de données
thode d’optimisation itérative qui consiste gement de fonction objectif et la prise
environnementales et en les initiant à
à « remplir » au mieux l’espace délimité en compte de deux niveaux d’agrégation
l’analyse comparative de ces données.
par les contraintes réglementaires à l’aide posent plusieurs questions que nous
L’ambition du projet est de faire de chacun
de formes géométriques simples. Dans ce aborderons dans cet exposé.
de ces élèves un acteur de la recherche
scientifique et de susciter ainsi de l’inté-
rêt pour les matières scientifiques et pour
la recherche appliquée dans un domaine
sensible.
Un réseau d’établissements scolaires d’Île
-de-France (de l’école élémentaire au ly-
cée) seront équipés de géocubes 3G mul-
ticapteurs, outils de mesures sismiques,
environnementales et géographiques : me-
sures de qualité de l’air avec comptage de
particules, sonomètres, capteurs météo...
L’IGN accompagnera les enseignants dans
leur mission éducative, en leur apportant
Prototype du nouveau Géocube doté d’une couche
un complément de supports pédagogiques anémomètre à ultra-sons et d’une couche batterie.
adaptés et différenciés pour le primaire, le
collège et le lycée pour une meilleure com-
préhension des phénomènes observés :
données physiques observées, notions de
14 15
A M P H I T H É ÂT R E P I C A R D A M P H I T H É ÂT R E P I C A R D
jeudi 18 avril 16h05 jeudi 18 avril 16h35
Analyses des risques humains et environnementaux Analyses des risques humains et environnementaux
Signature gravitationnelle du séisme de Tohoku (11 mars 2011) Détection du vandalisme dans l’information géographique
dans les géoïdes GRACE. volontaire par apprentissage automatique.
I. Panet1, S. Bonvalot2, C. Narteau3, D. Remy2, J.-M. Lemoine4 Q. T. Truong1, G. Touya2, C. de Runz3
1
IPGP, IGN, Univ. Paris Diderot, Sorbonne Paris Cité, UMR 7154 CNRS, Paris, 1
Univ. Paris-Est, LASTIG MEIG, IGN, ENSG, F-94160 Saint-Mandé, France
France 2
Univ. Paris-Est, LASTIG GEOVIS, IGN, ENSG, F-94160 Saint-Mandé, France
2
GET, Université de Toulouse, IRD, UMR 5563 CNRS, CNES, Toulouse, France 3
Modeco, CReSTIC, Université de Reims Champagne-Ardenne, CS 30012,
3
IPGP, Univ. Paris Diderot, UMR 7154 CNRS, Sorbonne Paris Cité, Paris, France F-51687, Reims cedex 2, France
4
GET, Université de Toulouse, CNES, UMR 5563 CNRS, IRD, Toulouse, France
Le vandalisme dans la saisie collaborative au concept d’anomalie, nous présentons
de données géographiques est un les résultats de détection du vandalisme
Nous étudions l’apport des observations signaux extrêmes concentrés à proximité phénomène encore peu étudié, bien que dans OpenStreetMap par une approche
de gravimétrie spatiale pour la compré- de l’épicentre, nous détectons des varia- réel. En effet, puisque le système de non-supervisée. Nous discuterons alors de
hension des grands séismes de subduc- tions de gravité dans les mois précédant saisie collaboratif donne la possibilité aux l’intérêt de se tourner vers les méthodes
tion, des zones côtières qui peuvent être la rupture, à l’échelle régionale sur plus contributeurs d’éditer librement les élé- d’apprentissage supervisé pour résoudre
densément peuplées et sont le siège des de 2000 km le long de la subduction des ments cartographiés, il permet aux plus ce problème.
évènements les plus dévastateurs. Ce type plaques Pacifique et Philippine sous la malintentionnés de dégrader la base de
d’observation est en effet le seul sensible plaque Eurasie. Nos résultats suggèrent données, par exemple, en intégrant des
aux mouvements tout le long de l’inter- que la rupture géante fait partie d’une informations erronées ou fictives sur la
face de subduction, non seulement près déformation qui migre de la profondeur carte. Par conséquent, le risque de van-
de la surface mais aussi à de plus grandes vers la surface et même l’intérieur de deux dalisme de l’information géographique
profondeurs dans le manteau, et présente plaques océaniques, à travers tout le sys- volontaire constitue un frein à l’utilisation
une couverture homogène à terre comme tème de subduction. de ce type de données. Il est donc impor-
en mer. Les mouvements ainsi détectés dans les tant de pouvoir définir formellement ce
Dans ce contexte, nous présentons une géoïdes GRACE apparaissent considéra- qu’est le vandalisme cartographique afin
analyse originale des variations tempo- blement plus étendus que d’après les ob- de pouvoir le détecter.
relles du champ de gravité issues de la servations de mouvements crustaux et de Dans une démarche de qualification de
mission GRACE, dans une large fenêtre sismologie. Ces comparaisons soulignent l’information géographique volontaire,
spatio-temporelle autour du séisme de la nécessité d’intégrer la gravimétrie sa- nous cherchons à mettre en place une
Tohoku (Mw 9.0, mars 2011). Conduite à tellitaire aux autres types d’observations méthodologie de détection du vandalisme
des échelles spatiales et temporelles in- géophysiques et géodésiques pour décrire dans les données OpenStreetMap. En rap-
termédiaires (quelques centaines de ki- pleinement les déformations associées à prochant le vandalisme cartographique
lomètres, sur des périodes allant du mois une rupture géante.
à quelques années), elle nous permet de
mettre en évidence et replacer dans un
scénario global la séquence de transferts
de masses associés au séisme. En plus des
16 17
A M P H I T H É ÂT R E P I C A R D N OT ES
jeudi 18 avril 17h05
Analyses des risques humains et environnementaux ..........................................................................................................................
Des expériences en réalité augmentée embarquées sur smartphone ..........................................................................................................................
pour apprendre un territoire dans un contexte ludique. ..........................................................................................................................
B. Grelaud
Conseil départemental de l’Isère ..........................................................................................................................
..........................................................................................................................
Le Département de l’Isère développe, dans On veut étudier :
une logique R&D montée en partenariat L’utilisation conjointe des différents ..........................................................................................................................
avec l’Université Grenoble-Alpes et l’Institut capteurs équipant les outils mobiles (GPS,
National de l’Information Géographique et gyromètre, accéléromètre, magnétomètre, ..........................................................................................................................
Forestière (IGN), des applications mobiles caméra) pour visualiser des contenus
destinées à faire découvrir son territoire externes précisément positionnés dans ..........................................................................................................................
et son patrimoine, notamment naturel. Il la réalité.
..........................................................................................................................
s’agit d’utiliser la réalité augmentée (c’est La manière de penser les interfaces
à dire l’ajout d’une information visuelle ou utilisateurs en jouant à la fois sur l’in-
..........................................................................................................................
textuelle à ce qui est perçu en vrai) à des teractivité pour pallier à l’absence de
fins pédagogiques, pour inviter les utilisa- certains capteurs et/ou diversifier les ..........................................................................................................................
teurs à s’immerger dans les lieux où ils se usages, en proposant notamment
trouvent, à les observer différemment et différentes approches ludiques. ..........................................................................................................................
à en apprendre « l’invisible ». Le projet de
R&D consiste à élaborer puis tester auprès ..........................................................................................................................
de publics et d’acteurs socioprofession-
nels locaux ciblés, les premiers prototypes ..........................................................................................................................
de ces expériences en réalité augmentée.
..........................................................................................................................
Il comporte deux volets :
Sciences sociales : évaluation de la récep- ..........................................................................................................................
tion et de l’appropriation de ce genre de
médias par les usagers (touristes, locaux) ..........................................................................................................................
et les acteurs socioprofessionnels (guides,
gardes, gardiens), ainsi que sur leurs im- ..........................................................................................................................
pacts sur la sensibilisation à l’environne-
ment. ..........................................................................................................................
Technique :
L’outil devra permettre de déclencher au- ..........................................................................................................................
tomatiquement des contenus permettant
de visualiser une autre réalité, y compris © Parc national de la Vanoise - Marion Le Ralle, Lauriane Miara
Traversée du lac des Vaches (Pralognan-la-Vanoise), entre Tarentaise
dans des lieux déconnectés du réseau. et Maurienne.
18 19VENDREDI 19 AVRIL 2019 VENDREDI 19 AVRIL 2019
Amphithéâtre IFSTTAR Amphithéâtre Picard
28es Journées de la Recherche de l’IGN 28es Journées de la Recherche de l’IGN
Apprentissage automatique pour données spatiales Traitement large échelle et géovisualisation
09h00 . . . . . Modérateur : 09h00 . . . . . Modérateur :
C. Mallet. S. Christophe.
09h10 . . . . . Localisation basée image en conditions difficiles par apprentissage de modalités. 09h10 . . . . . Géovisualisation 3D Urbaine : Expérimentations en Réalité Augmentée et
(p. 22) Réalité Mixte In Situ. (p. 28)
N. Piasco, D. Sidibé, V. Gouet-Brunet, C. Demonceaux. A. Devaux, C. Hoarau, M. Brédif, S. Christophe.
09h40 . . . . . Segmentation supervisée de nuages de points 3D par apprentissage profond 09h40 . . . . . «50 nuances de Roboto : quelle typographie dans les cartes topographiques
de métrique. (p. 23)
multi-échelles». (p. 29)
M. Boussaha, L. Landrieu.
S. Biniek, G. Touya, G. Rouffineau.
10h10 . . . . . L’évaluation de modèles 3D reconstruits : l’étape oubliée. (p. 24) 10h10 . . . . . Simulations de télémétrie laser sur satellites pour le futur observatoire
O. Ennafii, A. Le Bris, F. Lafarge, C. Mallet.
géodésique fondamental de Tahiti dans le cadre du projet GÉODÉSIE. (p. 30)
................. 10h40 Pause D. Coulot, A. Pollet, V. Schott Guilmault, F. Deleflie, F. Reinquin, J.-C. Marty,
R. Biancale.
11h05 . . . . . ⍳0 - plane pursuit : approximation planaire par morceaux de données 3D 10h40 Pause
par optimisation sur graphes. (p. 25) .................
S. Guinard, L. Landrieu, L. Caraffa, B. Vallet. 11h05 . . . . . ForM@Ter le pôle de données et de services pour la Terre Solide
11h35 . . . . . Optimisation de tournées de véhicules avec informations incertaines. (p. 26) au sein de l’IR «Système Terre». (p. 31)
A. Le Guilcher, S. Martel, M. Brasebin. M. Diament, E. Deschamps-Ostanciaux, M. Mandea, O. Jamet.
12h05 . . . . . Caméra intelligente embarquée pour le suivi, robuste d’objets sur plateforme 11h35 . . . . . La signature des déglaciations passée et actuelle dans le repère international
mobile. (p. 27). de référence terrestre. (p. 32)
I. Salhi, V. Gouet-Brunet, E. Piriou, M. Ojail, M. Poreba. L. Métivier, Z. Altamimi, A. Sanchez, K. Chanard, P. Rebischung.
................. 12h35 Fin des Journées de la Recherche ................. 12h35 Fin des Journées de la Recherche
20 21A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
vendredi 19 avril 09h10 vendredi 19 avril 09h40
Apprentissage automatique pour données spatiales Apprentissage automatique pour données spatiales
Localisation basée image en conditions difficiles par Segmentation supervisée de nuages de points 3D par apprentissage
apprentissage de mobilités. profond de métrique.
N. Piasco1, 2, D. Sidibé1, V. Gouet-Brunet2, C. Demonceaux1 M. Boussaha1, L. Landrieu2
1
ImViA-VIBOT ERL CNRS 6000 Univ. Bourgogne Franche-Comté 1
LASTIG ACTE, IGN, Univ. Paris Est, Saint-Mandé 94160, France
2
LASTIG ACTE, IGN, ENSG, Univ. Paris Diderot, Sorbonne Paris Cité, Paris 2
LASTIG STRUDEL, IGN, Univ. Paris Est, Saint-Mandé 94160, France
La localisation basée image est cruciale Dans cet exposé, nous présenterons Nous proposons une nouvelle approche
dans de nombreux domaines comme un nouveau descripteur d’image appris d’apprentissage supervisée pour la
la navigation en milieu urbain, la robo- pour la localisation basée image en mi- sur-segmentation de nuages de points 3D
tique autonome, la réalité augmentée, lieu urbain. Cette nouvelle méthode se en super-points. Cette méthode opère en
etc. On peut assimiler cette approche base sur l’apprentissage de la géométrie deux temps : calcul de descripteurs des
de localisation à un problème d’indexation de la scène afin d’être robuste aux chan- points 3D par apprentissage profond, puis
d’images ou l’on cherche à géolocaliser gements visuels dus à l’illumination ou à partition du nuage de points en zones
une nouvelle donnée visuelle à partir l’évolution du paysage au cours du temps. uniformes, appelées super-points.
d’un ensemble d’images dont les posi- Au travers d’une évaluation exhaustive, Les descripteurs sont appris de telle sorte
tions sont connues a priori. Afin d’évaluer nous montrerons en particulier que ce qu’ils présentent de forts contrastes à l’in-
de façon efficace la similitude entre les nouveau descripteur est efficace pour terface des objets, assurant que la partition
images de référence et la requête à la localisation inter-saison et sur le long suit leurs vrais contours. Nos expériences
localiser, il est nécessaire de comparer terme. sur des scènes intérieures et extérieures
des descripteurs d’image qui produisent montrent la nette supériorité de notre
une signature compacte, robuste et approche sur l’état de l’art, qui restait
discriminante pour chaque image. jusque-là non supervisée.
En effet, à précision égale, notre algorithme
permet d’obtenir une diminution par plus de
5 du nombre de super-points nécessaires à
la segmentation d’une scène. Enfin, nous
montrons que notre approche peut être
combinée à un algorithme de classification
de super-points pour obtenir d’excellents
résultats en termes de segmentation
sémantique, améliorant ici aussi l’état de
l’art.
Illustration d’une scène compliquée avec un tableau blanc sur un mur
blanc : à partir du nuage de points rgb (a), on calcule des descripteurs
Schéma explicatif de notre nouvelle méthode d’indexation d’images pour la localisation par point (b) qui seront utilisés par notre méthode de sur-ségmentation
en milieu urbain en conditions difficiles. (c) tout en restant fidèle à la vérité terrain (d).
22 23A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
vendredi 19 avril 10h10 vendredi 19 avril 11h05
Apprentissage automatique pour données spatiales Apprentissage automatique pour données spatiales
L’évolution de modèles 3D reconstruits : l’étape oubliée. l0 - plane pursuit : approximation planaire par morceaux de
O. Ennafii , A. Le Bris , F. Lafarge , C. Mallet
1, 2 1 2 1 données 3D par optimisation sur graphes.
1
Univ. Paris-Est, LaSTIG STRUDEL, IGN, ENSG, Saint-Mandé, France S. Guinard1, L. Landrieu2, L. Caraffa1, B. Vallet1
2
Inria, TITANE, Sophia Antipolis, France 1
Univ. Paris-Est, LaSTIG ACTE, IGN, ENSG, F-94160 Saint-Mandé, France
2
Univ. Paris-Est, LaSTIG STRUDEL, IGN, ENSG, F-94160 Saint-Mandé, France
La modélisation automatique de scènes type forêt aléatoire, dans le but de prédire la
urbaines en 3D, à partir de données géos- qualité du modèle du bâtiment en ques- Nous proposons une nouvelle méthode problème d’optimisation non-convexe
patiales, a été étudiée pendant plus de tion. Nous avons testé cette approche pour l’approximation par morceaux de global grâce à une structure de graphe
trente ans. Cependant, les modèles sur trois zones urbaines françaises diffé- données 3D telles que les nuages de points sous-jacente. Ainsi, l’utilisation d’une heu-
résultants de telles méthodes demandent rentes. Les erreurs les plus fréquentes ou les maillages triangulés. Notre méthode ristique adaptée permet de résoudre effica-
des corrections manuelles fastidieuses. sont repérées avec un F-score compris est conçue pour traiter de grands jeux cement ce problème. Nous proposons une
Le but de ce travail est de proposer une entre 80% et 99%. Le passage à l’échelle, de données (contenant plusieurs millions méthode hiérarchique pour efficacement
nouvelle approche pour évaluer automa- en termes de transférabilité, généralisa- de points/triangles), et composés majori- résoudre ce problème : l0 - plane pursuit.
tiquement la qualité de modèles 3D de tion et représentativité, de cette méthode tairement de structures planaires (routes, Enfin, nous comparons nos résultats avec
bâtiments. Une taxonomie d’erreurs est de qualification a aussi été étudié. En gar- façades, …). De telles structures sont fréquentes une méthode de segmentation de type
proposée dans un premier temps. Dans un dant toutes les données multimodales dans les zones façonnées par l’homme, « croissance de région » et observons des
second temps, des attributs, basés sur extrinsèques, ainsi qu’en mélangeant les comme les zones urbaines. Notre approche améliorations importantes, aussi bien en
les propriétés géométriques intrinsèques modèles de différentes zones urbaines, est adaptative à la géométrie locale de la termes de précision de l’approximation,
des bâtiments ainsi, dans la mesure du la stabilité des taux de détection peut scène. Notre principale contribution est la que de temps de calcul.
possible, des images à hautes résolutions être garantie même avec peu de données formulation du problème d’approximation
et des cartes de profondeur, sont extraits. d’entraînement. planaire par morceaux sous la forme d’un
Ces attributs alimentent un classifieur de
Nuage de points Initialisation Itération Résultat final
24 25A M P H I T H É ÂT R E I FST TA R A M P H I T H É ÂT R E I FST TA R
vendredi 19 avril 11h35 vendredi 19 avril 12h05
Apprentissage automatique pour données spatiales Apprentissage automatique pour données spatiales
Optimisation de tournées de véhicules avec informations Caméra intelligente embarquée pour le suivi robuste d’objet sur
incertaines. plateforme mobile.
A. Le Guilcher1, S. Martel2, 3, M. Brasebin1. I. Salhi1, 2, V. Gouet-Brunet2, E. Piriou1, M. Ojail1, M. Poreba2.
1
LASTIG, IGN, ENSG, Univ. Paris-Est Marne-La-Vallée 1
CEA, LIST, 91191 Gif-sur-Yvette Cedex, France
2
LHSV, École des Ponts ParisTech, EDF R&D, Cerema 2
Univ. Paris-Est, LASTIG MATIS, IGN, ENSG, 94160 Saint-Mandé, France
3
CERMICS, École des Ponts ParisTech
Le suivi d’objets et plus généralement de différents types de données/capteurs).
Les épisodes d’inondations fragilisent difficile par les incertitudes entourant la localisation est un sujet complexe et Puisque la fusion des données multicap-
les territoires. Tous les acteurs doivent à la fois les quantités de déchets pro- crucial de recherche en systèmes embar- teurs donne accès à une information
alors s’organiser pour assurer le plus duites et la praticabilité des différentes qués autonomes (ex. lunettes intelligentes, globale plus fiable et complète, nous
rapidement possible un retour au fonc- voies du réseau. Pour aider à la résolution caméras intelligentes ou drones). nous focalisons ainsi sur l’exploitation
tionnement normal pour les services de ce problème, nous proposons une Ces systèmes imposent de fortes de plusieurs modalités pour améliorer
essentiels (santé, éducation, mobilité, …). approche résolvant en amont le problème contraintes en termes d’intégration, de le suivi d’objets dans un contexte em-
Dans ce cadre, la collecte des déchets est de tournées de véhicules simultanément consommation d’énergie et de complexité barqué. En particulier, nous passons en
un problème important car les inonda- pour différentes réalisations des aléas. calculatoire afin de pouvoir répondre revue différents algorithmes de suivi
tions occasionnent la création de grandes Lors d’une inondation, la tournée pré-
aux exigences de différentes applica- basés sur caméra seule, ou bien, sur son
quantités de déchets, et la collecte de calculée pour les paramètres les plus
celles-ci est indispensable, parfois pour proches de la situation réelle peut alors tions telles que la cartographie, la réalité couplage avec IMU (Inertial Measurement
dégager les voies, mais aussi pour des servir de base pour trouver rapidement augmentée, la navigation autonome, etc. Unit). Puis, nous étudions l’intégration
considérations visuelles et sanitaires. une solution de collecte efficace. Le suivi d’objets (points d’intérêt) pour d’approches complémentaires pondérant
L’optimisation de cette collecte est rendue la localisation peut être fait de manière complexité algorithmique et multimodalité
monomodale (un seul type de données/ pour pouvoir répondre avec optimalité à
capteurs), ou multimodale (un couplage différentes conditions applicatives.
Réseau routier étudié et deux solutions de tournées de véhicules.
Dans le deuxième cas, certaines voies sont submergées.
26 27A M P H I T H É ÂT R E P I C A R D A M P H I T H É ÂT R E P I C A R D
vendredi 19 avril 09h10 vendredi 19 avril 09h40
Traitement large échelle et géovisualisation Traitement large échelle et géovisualisation
50 nuances de Roboto : quelle typographie dans les cartes
Géovisualisation 3D Urbaine : Expérimentations en Réalité topographiques multi-échelles.
Augmentée et Réalité Mixte In Situ.
A. Devaux, C. Hoarau, M. Brédif, S. Christophe S. Biniek1, 2, G. Touya1, G. Rouffineau2
LASTIG GEOVIS, IGN, ENSG, Univ. Paris-Est 1
LASTIG GEOVIS, IGN, ENSG, Univ. Paris Diderot, Sorbonne Paris Cité, Paris
2
ESAD GRENOBLE VALENCE
Nous présentons dans cet exposé les mixée avec le virtuel. Ce mélange produit
résultats de nos récentes expérimenta- un nouvel environnement et des visuali- Le développement de cartes multi-échelles
tions en réalité mixte dans un contexte sations où les objets physiques du monde et multi-représentations nécessite de
majoritairement In Situ : la rue. En particulier, réel et numérique du monde virtuel penser les ressources et les protocoles
nous explorons comment adapter, voir coexistent et peuvent interagir en temps cartographiques dans une logique d’in-
créer de nouveaux concepts en géovisua- réel. Parmi les sujets investigués, l’aména- teropérabilité. Dans le domaine de la
lisation exploitables aujourd’hui à l’aide gement urbain, la visualisation à travers toponymie, cela nécessite, en particulier,
des récents périphériques de réalité mixte le sol, les murs, et enfin le voyage dans de réfléchir à leur organisation et leur
tel que l’Hololens permettant de projeter le temps. structuration avec plus de granularité.
sur la rétine de son utilisateur une réalité Partant du principe que la typographie, en
tant qu’outil de visualisation de l’information
toponymique, est un outil dont le potentiel
est encore sous-exploité, nous nous de-
mandons comment le domaine du design
typographique peut améliorer notre com-
préhension des catégories toponymiques
et aider à les structurer dans une logique
multi-échelle. L’approche adoptée pour
répondre à cette question consiste à
analyser différents géoportails pour trouver
les bonnes et les mauvaises pratiques,
en corrélant les entités géographiques
symbolisées et les variables visuelles
toponymiques employées.
Spécifications typographiques déduites de l’analyse comparative
de trois géoportails (IGN-FRance, OSM & GoogleMaps) au niveau
de zoom 14.
Image du haut : Visualisation In Situ en réalité mixte d’un portail temporel.
Image du bas : 4 étapes d’un cas d’utilisation de modification de bâtiment existant en Réalité Mixte In Situ.
28 29A M P H I T H É ÂT R E P I C A R D A M P H I T H É ÂT R E P I C A R D
vendredi 19 avril 10h10 vendredi 19 avril 11h05
Traitement large échelle et géovisualisation Traitement large échelle et géovisualisation
Simulations de télémétrie laser sur satellites pour le futur ForM@Ter le pôle de données et de services pour la Terre Solide
observatoire géodésique fondamental de Tahiti dans le cadre au sein de l’IR «Système Terre».
du projet GEODESIE. M. Diament1, E. Deschamps-Ostanciaux1, M. Mandea2, O. Jamet3
D. Coulot1, 2, 4, A. Pollet1, V. Schott Guilmault3, 1, F. Deleflie4, F. Reinquin5,
1
IPGP, Univ. Paris Diderot, Sorbonne Paris Cité, CNRS UMR 7154, GRGS, Paris
J.C. Marty5, R. Biancale6
2
CNES, Toulouse
1
IPGP, IGN, Univ. Paris Diderot, Sorbonne Paris Cité, CNRS UMR 7154, GRGS,
3
IPGP, IGN, Univ. Paris Diderot, Sorbonne Paris Cité, CNRS UMR 7154, GRGS, Paris
Paris
2
ENSG, Champs-sur-Marne
3
CNES, GRGS, Paris La création du pôle national de données ForM@Ter a pour ambition de s’inscrire
4
IMCCE, Observatoire de Paris, PSL Université Paris, CNRS UMR 8028, et de services pour la terre solide a été dans les paysages national, européen et
Sorbonne Université, Université de Lille, GRGS initiée par le CNES et le CNRS avec une international en articulation étroite avec
5
CNES/Géosciences Environnement Toulouse, Observatoire Midi Pyrénées, participation active de l’IGN. Aujourd’hui les infrastructures de recherche en place
GRGS, Toulouse plus d’une dizaine d’organismes sont ou en construction. Il participe à l’anima-
appelés à signer la convention fondatrice tion de la communauté utilisatrice et
6
GFZ, GRGS, Potsdam
de ce pôle. Fédéré au sein de l’Infrastruc- développe des services distribués dans
ture nationale de recherche « Données les domaines de la découverte et
Le projet GEODESIE (geodesie-anr.ign.fr) également un bref panorama du projet pour le Système Terre » avec les autres pôles du téléchargement de données et de
vise à poser les jalons pour la géodésie de GEODESIE. Les résultats des simulations Aeris, Odatis et Théia dédiés respective- produits, du traitement par des méthodes
demain, par une assimilation de données pour la technique VLBI seront présentés ment à l’atmosphère, l’océan et aux à l’état de l’art, et du support aux utili-
de géodésie spatiale sans précédent, per- dans le poster de Vladimir Schott Guilmault surfaces continentales, le pôle ForM@ter a sateurs non experts, notamment dans le
mettant notamment une prise en compte et ses collègues. pour objectif de faciliter l’accès aux don- domaine de l’observation de la forme et
de l’ensemble des liens possibles entre les nées spatiales et « in-situ » sur la Terre des mouvements du sol.
techniques spatiales mises en jeu et d’une interne et la géodésie, de contribuer à la
grande majorité des mesures disponibles création de nouveaux produits et de
depuis l’avènement de l’ère spatiale. Dans délivrer des services pour les communautés
ce cadre, l’équipe du projet a apporté sa scientifiques concernées.
contribution aux réflexions actuellement
en cours sur le futur observatoire géodé-
sique de Tahiti (Polynésie française). Cette
contribution repose sur des simulations
pour étudier l’intérêt de disposer d’une
antenne VLBI et d’une station de télémé-
trie laser rénovée sur ce site géodésique.
Dans cette présentation, nous présente-
rons les résultats de ces simulations pour Logo du projet GEODESIE. Crédits : David Coulot, IGN.
la télémétrie laser et nous proposerons
30 31A M P H I T H É ÂT R E P I C A R D N OT ES
vendredi 19 avril 11h35
Traitement large échelle et géovisualisation
..........................................................................................................................
La signature des déglaciations passée et actuelle dans le repère ..........................................................................................................................
international de référence terrestre.
..........................................................................................................................
L. Métivier1, Z. Altamimi1, A. Sanchez1, 2, K. Chanard1, P. Rebischung1
1
IPGP, IGN, ENSG, Univ. Paris Diderot, Paris ..........................................................................................................................
2
CNES, Paris
..........................................................................................................................
Le rebond postglaciaire (ou réajustement surpasser les effets du rebond postglaciaire ..........................................................................................................................
isostatique glaciaire) est connu pour être sur le mouvement des stations, à savoir la
une des sources géophysiques majeures fonte des glaces actuelle au Groenland, en ..........................................................................................................................
de mouvements verticaux sur le long Antarctique, et en Alaska, voire en Islande
terme des stations de géodésie spatiale et au Spitzberg. Nous étudions ici la part ..........................................................................................................................
autour du globe. Il affecte en particulier les de ces deux phénomènes dans les mou-
stations qui servent à construire le repère vements de stations du point de vue de ..........................................................................................................................
international de référence terrestre (ITRF l’ITRF, de ses différentes solutions. Nous
..........................................................................................................................
pour International Terrestrial Reference abordons aussi le problème de la prise
Frame), construction dont l’équipe de en compte des mouvements non-linéaires
..........................................................................................................................
géodésie de l’IPGP-IGN a la charge. Mais engendrés par la déglaciation actuelle
depuis quelques années un autre phéno- dans la construction de l’ITRF2020. ..........................................................................................................................
mène d’origine glaciaire semble vouloir
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
..........................................................................................................................
Vitesses verticales des stations GNSS de l’ITRF2014. Les stations présentant des déformations post-sismiques
importantes ou des déformations d’origine anthropogénique évidentes ne sont pas représentées sur la carte.
32 33LISTE DES POSTERS
Jeudi 18 avril 12h15 - 14h00 - Buffet (Salle polyvalente)
Posters (Salle polyvalente et Hall Sud)
Ana Sanchez Mattia Bunel
Contribution des déglaciations passées et actuelles sur les déformations et le champ Modélisation et raisonnement spatial flous pour l’aide à la localisation de victimes en
de pesanteur de la Terre : comment séparer les sources ? montagne
La doctorante Qualliscope : Souheir Mehanna
Raphael Sulzer
Data Quality: from Sensors to Indicators and Predictions
Reconstruction de bâtiments à partir de données image et LiDAR aériennes et terrestres
Anatol Garioud
Imane Fikri
Suivi de la dynamique des prairies permanentes par analyse des séries temporelles
Géoréférencement précis d’images terrestres d’un véhicule par hybridation de
multimodales
photogrammétrie aérienne et terrestre
Yilin Zhou Sébastien Giordano
Reconstruction 3D de scènes type corridor à partir d’images aériennes et de données gnss ANR HIATUS2019-2022 : Historical Image Analysis for Territory evolUtion Stories
Dimitri Gominski Clément Mallet, Arnaud Le Bris, Jordi Inglada, Mathieu Fauvel,
Utilisation des réseaux génératifs pour la recherche d’images basée contenu Nesrine Chehata
ANR MAESTRIA : Multi-modAl Earth obServaTion Image Analysis
Marie Ballère
Détection quasi temps-réel de la déforestation en Guyane à partir des séries Anouk Schleich et Hugo Boulze
temporelles Sentinel-1 Génération automatique de courbes de niveau à partir d’un MNT sur les plateaux
karstiques
Maïlys Lopes
Maxime Parant et Louis-Marie Gauer
Assessment of Sentinel-1 and Sentinel-2 time series to mapping natural vegetation
Géoréférencement de quadrillages issus de plans de pistes
in a West African protected area
Zacharie Aoulad-Lafikh et Manon Payoux
Gauthier Fillières-Rivau Caractérisation de la pollution lumineuse sur le territoire parisien
Relief map design tool for visually impaired people
Hubert Dupuy et Thomas Parsy
Pierre Biasutti Modèle de contruction d’isochrones lors de randonnées en montagne
Détection d’objets dans un nuage de points LiDAR en topologie capteur
Apolline De Wit et Hugo Senges
Evelyn Paiz-Reyes Représentation multiscalaire des relations matrimoniales au Nord-Est de l’Inde
Image-based rendering of large historical image collection
Hugo De Paulis et Lucas Tacito
Qasem Safariallahkheili GNSS cinématique pour la photogrammétrie
Style Exploration & Interpolation for 3D Geovisualization
Marie Bastien et Luc Béraud
Ibrahim Maidaneh Abdi Intégration de l’environnement urbain dans la mesure du potentiel de marche à pieds
Qualification de données collaboratives par comparaison avec des données d’autorité des territoires urbains : Application à la ville d’Olomouc en République Tchèque
34 35http://recherche.ign.fr
www.ensg.eu
ign.fr
jr@ign.fr
#JRIGN2019Vous pouvez aussi lire