Caractéristiques du produit - CRB 15000
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

ROBOTICS Caractéristiques du produit CRB 15000
Trace back information: Workspace Main version a397 Checked in 2021-04-01 Skribenta version 5.4.005
Caractéristiques du produit
CRB 15000
OmniCore
ID du document: 3HAC077390-004
Révision: A
© Copyright 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.
Les informations contenues dans ce manuel peuvent être modifiées sans préavis et
ne doivent pas être interprétées comme un engagement de la part d'ABB. La
responsabilité d'ABB ne sera pas engagée par suite d'erreurs contenues dans ce
manuel.
Sauf stipulation expresse du présent manuel, aucune des informations ne pourra
être interprétée comme une garantie d'ABB couvrant les risques de perte, de
dommages corporels ou matériels, l'adaptation à un usage particulier ou toute autre
garantie que ce soit.
En aucun cas, la responsabilité d'ABB ne pourra être engagée à la suite de dommages
fortuits ou liés à l'utilisation du présent manuel ou des produits décrits dans le manuel.
Le présent manuel ne doit pas être reproduit ou copié, intégralement ou en partie,
sans l'autorisation écrite d'ABB.
À conserver pour référence ultérieure.
D'autres exemplaires de ce manuel peuvent être obtenus auprès d'ABB.
Traduction de la notice originale.
© Copyright 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.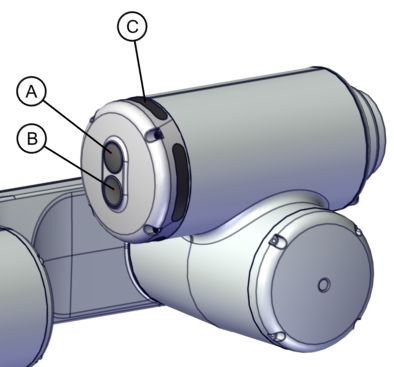
Table des matieres
Table des matieres
Vue générale de ce manuel .............................................................................................................. 7
1 Description 9
1.1 Structure ......................................................................................................... 9
1.1.1 Introduction ............................................................................................ 9
1.1.2 Les différents versions de robot ................................................................. 11
1.2 Normes standard .............................................................................................. 12
1.2.1 Normes applicables ................................................................................. 12
1.3 Installation ....................................................................................................... 14
1.3.1 Présentation de l'installation ...................................................................... 14
1.3.2 Caractéristiques techniques ...................................................................... 15
1.3.3 Configuration des trous et vis de fixation ..................................................... 20
1.3.4 Montage de l'équipement sur le robot (dimensions du robot) ........................... 22
1.3.5 Configurer l’interface côté bras .................................................................. 24
1.4 Étalonnage du robot .......................................................................................... 25
1.5 Diagrammes des charges ................................................................................... 26
1.5.1 Introduction ............................................................................................ 26
1.5.2 Schémas ............................................................................................... 27
1.5.3 Charge maximale et moment d'inertie pour mouvement d'axe 5 complet et limité
à la verticale ........................................................................................... 28
1.5.4 Couple de poignet ................................................................................... 29
1.5.5 Accélération TCP maximale ...................................................................... 30
1.6 Maintenance et dépannage ................................................................................. 31
1.7 Mouvements du robot ........................................................................................ 32
1.7.1 Rayon d’action ....................................................................................... 32
1.7.2 Performances conformes à la norme ISO 9283 ............................................. 35
1.7.3 Vitesse .................................................................................................. 36
1.7.4 Distances et temps d'arrêt du robot ............................................................ 37
1.8 Connexions du client sur le manipulateur .............................................................. 38
2 Spécifications des variantes et options 41
2.1 Présentation des variantes et options ................................................................... 41
2.2 Manipulateur .................................................................................................... 42
2.3 Câbles au sol ................................................................................................... 44
Index 45
Caractéristiques du produit - CRB 15000 5
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.Cette page a été volontairement laissée vierge
Vue générale de ce manuel
Vue générale de ce manuel
À propos de ces caractéristiques du produit
Ces caractéristiques de produit décrivent les performances du manipulateur ou
d'une famille complète de manipulateurs en termes :
• d'impressions structurelles et dimensionnelles ;
• de respect des normes, de la sécurité et de l'équipement de fonctionnement ;
• de diagrammes des charges, de montage d'équipement supplémentaire, de
mouvement et de position atteinte ;
• de caractéristiques de variante et d'options disponibles.
La spécification couvre la pince avec le système de commande OmniCore.
Utilisation
Les caractéristiques du produit permettent d'obtenir des informations sur les
performances d'un produit, par exemple pour décider quel produit acheter. Pour
savoir comment utiliser un produit, il faut consulter le manuel du produit.
Les caractéristiques sont destinées au :
• Chefs et personnel produit ;
• Personnel ventes et marketing
• Personnel commandes et service clientèle
Références
Les documents auxquels ce manuel fait référence sont répertoriés dans le tableau
ci-dessous.
Nom du document ID du document
Manuel du produit - CRB 15000 3HAC077389-004
Manuel du produit - OmniCore C30 3HAC060860-004
Circuit diagram - CRB 15000 3HAC074304-003
Manuel de référence technique - Paramètres système 3HAC065041-004
Conseil
Tous les documents sont disponibles via le portail commercial myABB,
www.abb.com/myABB.
Révisions
Révision Description
A Première édition.
Caractéristiques du produit - CRB 15000 7
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.Cette page a été volontairement laissée vierge
1 Description
1.1.1 Introduction
1 Description
1.1 Structure
1.1.1 Introduction
Généralités
Le robot CRB 15000 est un robot articulé à 6 axes, agile, léger et flexible avec une
charge utile de 5 kg, spécifiquement conçu pour les industries manufacturières
nécessitant une souplesse élevée en matière d'automatisation, notamment dans
l’informatique, la communication et l’électronique grand public. Il dispose d'une
structure ouverte spécialement adaptée à une utilisation souple. Il peut
communiquer longuement avec les systèmes externes.
Usage prévu
Le robot CRB 15000 d’ABB est conçu pour être utilisé dans des applications
industrielles. Pour d'autres domaines d'utilisation, vérifiez si ce robot répond aux
normes requises, voir Normes applicables à la page 12.
ATTENTION
L’intégrateur du système de robot doit procéder à une évaluation du risque pour
la santé humaine.
Protection
Manipulateur, protection standard classée IP54.
Système d'exploitation
Le robot est équipé du système de commande C30 OmniCore et du logiciel de
commande du robot, RobotWare. RobotWare prend en charge tous les aspects
du système de robot, notamment le contrôle des mouvements, le développement
et l'exécution des programmes applicatifs, la communication, etc. Voir Manuel
d’utilisation - OmniCore.
Sécurité
Les normes de sécurité répertoriées concernent le robot, le manipulateur et le
système de commande complets.
Contribuer à la sécurité
Solide mais sûr, conçu pour manipuler des charges utiles jusqu'à 5 kg, le CRB
15000 dispose de capteurs de couple intégrés dans chacune de ses six articulations,
offrant ainsi une puissance supérieure et des performances de limitation de force.
Ensemble, ils préviennent le risque de blessure en assurant un arrêt immédiat du
robot en cas de détection d'un contact avec un travailleur humain.
Suite page suivante
Caractéristiques du produit - CRB 15000 9
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction
Suite
Fonctionnalités complémentaires
En ce qui concerne les fonctionnalités supplémentaires, le robot peut être équipé
d'un logiciel optionnel pour la prise en charge d'applications, par exemple les
fonctions de communication réseau et de fonctions avancées comme le
fonctionnement multitâche, contrôle par capteur, etc. Pour obtenir la description
complète des logiciels optionnels, reportez-vous à Caractéristiques du
produit - OmniCore série C.
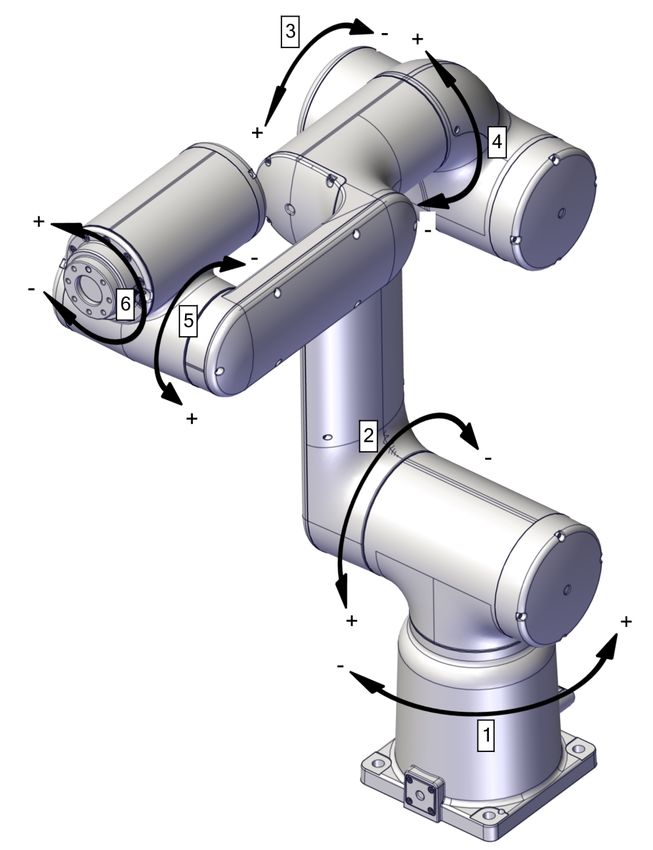
Axes du robot
xx2000002400
Rep Description Rep Description
1 Axe 1 2 Axe 2
3 Axe 3 4 Axe 4
5 Axe 5 6 Axe 6
10 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.1.2 Les différents versions de robot
1.1.2 Les différents versions de robot
Généralités
Le modèle CRB 15000 est disponible dans les versions suivantes.
Type de robot Capacité de manutention (kg) Portée (m)
CRB 15000-5/0.95 5 kg 0,95 m
Caractéristiques du produit - CRB 15000 11
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
1.2 Normes standard
1.2.1 Normes applicables
Remarque
Les normes indiquées sont valides au moment de la publication de ce document.
Les normes abandonnées ou remplacées sont retirées de la liste lorsque cela
est nécessaire.
Généralités
Le produit est conçu conformément à la norme ISO 10218-1:2011, Robots for
industrial environments - Safety requirements -Part 1 Robots, et aux parties
applicables des références normatives, telles que visées dans ISO 10218-1:2011.
En cas d'écarts par rapport à la norme ISO 10218-1:2011, ceux-ci sont répertoriés
dans la déclaration d'incorporation qui fait partie de la livraison du produit.
Règles normatives, ISO
Norme Description
ISO 9283:1998 Manipulating industrial robots - Performance criteria and related
test methods
ISO 10218-2 Robots and robotic devices - Safety requirements for industrial
robots - Part 2: Robot systems and integration
ISO 12100 Safety of machinery - General principles for design - Risk as-
sessment and risk reduction
ISO 13849-1:2006 Safety of machinery - Safety related parts of control systems
- Part 1: General principles for design
ISO 13850 Safety of machinery - Emergency stop - Principles for design
IEC 60204-1:2005 Safety of machinery - Electrical equipment of machines - Part
1: General requirements
IEC 62061:2005 Safety of machinery - Functional safety of safety-related elec-
trical, electronic and programmable electronic control systems
Normes et spécifications spécifiques à la région
Norme Description
ANSI/RIA R15.06 Safety requirements for industrial robots and robot systems
ANSI/UL 1740 Safety standard for robots and robotic equipment
CAN/CSA Z 434-14 Industrial robots and robot Systems - General safety require-
ments
Autres normes utilisées pour la conception
Norme Description
ISO 9787:2013 Robots and robotic devices -- Coordinate systems and motion
nomenclatures
Suite page suivante
12 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
Suite
Norme Description
IEC 61000-6-2 Electromagnetic compatibility (EMC) – Part 6-2: Generic stan-
dards – Immunity standard for industrial environments
IEC 61000-6-4 Electromagnetic compatibility (EMC) – Part 6-4: Generic stan-
(option 129-1) dards – Emission standard for industrial environments
ISO 13732-1:2008 Ergonomics of the thermal environment - Part 1
ISO 14644-1:2015 i Classification of air cleanliness
IEC 60529:1989 + A2:2013 Degrees of protection provided by enclosures (IP code)
ISO/TS 15066 Robots and robotic devices - Safety requirements - Industrial
collaborative workspace
i Uniquement les robots avec protection Clean Room.
Caractéristiques du produit - CRB 15000 13
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.1 Présentation de l'installation
1.3 Installation
1.3.1 Présentation de l'installation
Généralités
Les informations détaillées sur l’installation de CRB 15000 sur le site d’utilisation
se trouvent dans Manuel du produit - CRB 15000 et dans Manuel du
produit - OmniCore C30.
L'installation doit être effectuée par un personnel d’installation qualifié
conformément aux exigences de sécurité définies par les normes et réglementations
nationales ou régionales applicables.
Conseil
Tous les documents sont disponibles via le portail commercial myABB,
www.abb.com/myABB.
Charges supplémentaires
Voir Montage de l'équipement sur le robot (dimensions du robot) à la page 22.
Plus d’informations sur l’interface côté bras
L'interface côté bras dispose de boutons configurables et d’un cercle lumineux
qui indique l'état, voir Configurer l’interface côté bras à la page 24. Pour plus de
détails sur la procédure de configuration, consultez Manuel du produit - CRB
15000 .
Il est également possible de configurer une lampe externe ou similaire à l'aide de
signaux d'E/S. La description correspondante se trouve dans le manuel du produit
du système de commande (Manuel du produit - OmniCore C30), et dans les manuels
décrivant la configuration des E/S.
Plus d'informations sur la configuration de sécurité
La configuration de SafeMove est décrite dans Manuel sur les
applications - SafeMove.
Il incombe à l’intégrateur du robot de calculer, de concevoir et de vérifier les
mesures de sécurité telles que définies dans les normes ISO 10218-2 et ISO/TS
15066.
Remarque
Lors du démarrage du robot, un client FlexPendant ou RobotStudio connecté
indique s'il n'y a pas de configuration de sécurité validée.
14 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.2 Caractéristiques techniques
1.3.2 Caractéristiques techniques
Poids, robot
Le tableau indique le poids du robot.
Modèle de robot Masse
CRB 15000 28 kg
Remarque
Le poids n’inclut pas les outils et autres équipements installés sur le robot !
Charges sur la fondation, robot
La figure ci-dessous indique les directions des forces de contrainte des robots.
Les directions sont valables pour tous les robots au sol, sur table, au plafond et
suspendus.
Txy
Fz
Fxy
Tz
xx1100000521
Fxy Force dans un sens du plan XY
Fz Force dans un plan Z
Txy Couple de torsion dans un sens du plan XY
Tz Couple de torsion dans un plan Z
Suite page suivante
Caractéristiques du produit - CRB 15000 15
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.2 Caractéristiques techniques
Suite
Le tableau ci-dessous indique les forces et couples exercés sur le robot au cours
de divers types de fonctionnement.
Remarque
Ces valeurs de forces et de couples sont extrêmes et rarement atteintes en cours
de fonctionnement. Les valeurs n’atteignent également jamais leur maximum en
même temps.
AVERTISSEMENT
L'installation du robot est limitée aux options de montage indiquées dans les
tableaux de charges suivants.
Monté sur le sol
Force Charge d'endurance (en fonctionne- Charge maximale (arrêt d'urgence)
ment)
Force xy ±303 N ±1113 N
Force z +280 ±147 N +280 ±857 N
Couple xy ±246 Nm ±711 Nm
Couple z ±145 Nm ±334 Nm
Monté sur un mur
Force Charge d'endurance (en fonctionne- Charge max. (arrêt d'urgence)
ment)
Force xy +280 ±130 N +280 ±1000 N
Force z ±289 N ±944 N
Couple xy ±275 Nm ±768 Nm
Couple z ±162 Nm ±338 Nm
Suspendu
Force Charge d'endurance (en fonctionne- Charge max. (arrêt d'urgence)
ment)
Force xy ±303 N ±1113 N
Force z -280 ±147 N -280 ±857 N
Couple xy ±246 Nm ±711 Nm
Couple z ±145 Nm ±334 Nm
Exigences, fondation
Le tableau ci-dessous indique les exigences auxquelles doit répondre la fondation
supportant le poids du robot installé :
Exigences Valeur Remarque
Platitude de la surface 0,1/500 mm La valeur du nivellement est définie selon les
de fondation points d'ancrage de la base du robot.
Suite page suivante
16 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.2 Caractéristiques techniques
Suite
Exigences Valeur Remarque
Inclinaison maximum Aucune restric- Dans le cas des robots à montage mural, la zone
tion de travail pour l’axe 1 est fonction de la charge
utile et des positions des autres axes. Il est re-
commandé de procéder à une simulation dans
RobotStudio.
Fréquence de résona- 22Hz La valeur est recommandée pour une performa-
nce minimum nce optimale.
Re- En raison de la rigidité de la fondation, prenez
marque en compte l’équipement dans la masse du ro-
Le fait d’avoir bot. i
une fréquence de Pour des informations liées à la compensation
résonance plus des flexibilités de fondation, voir Application
faible que celle manual - Controller software OmniCore, rubrique
recommandée Mode de processus des mouvements.
peut affecter la
durée de vie du
manipulateur.
i La fréquence de résonance minimale donnée doit être interprétée comme la fréquence de la
masse/inertie du robot, le robot supposé rigide, lorsqu’une élasticité translationnelle/torsionnelle
de la fondation est ajoutée, p. ex. la rigidité du piédestal sur lequel le robot est monté. La fréquence
de résonance minimale ne doit pas être interprétée comme la fréquence de résonance du bâtiment,
du sol, etc. Par exemple, si la masse équivalente du sol est très élevée, cela n’affectera pas le
mouvement du robot, même si la fréquence est bien inférieure à la fréquence déclarée. Le robot
doit être monté aussi rigide que possible sur le sol.
Les perturbations des autres machineries affecteront le robot et la précision de l’outil. Le robot
possède des fréquences de résonance dans la zone de 10-20 Hz et les perturbations dans cette
plage seront amplifiées, bien qu’amorties quelque peu par le servo-contrôle. Cela pourrait être un
problème, en fonction des exigences des applications. Si c’est un problème, le robot doit être isolé
de l’environnement.
Conditions d'entreposage, robot
Le tableau ci-dessous indique les conditions d'entreposage préconisées pour le
robot :
Paramètre Valeur
Température ambiante minimale -40°C
Température ambiante maximale 70°C
Température ambiante maximale (moins de 24 h) 70°C
Humidité ambiante maximale 95% à température constante
(non destiné à un fonctionnement
avec condensation)
Altitude ambiante maximale 0-3 000 m (100-74 kPa)
Conditions de fonctionnement, robot
Le tableau ci-dessous indique les conditions de fonctionnement préconisées pour
le robot :
Paramètre Valeur
Température ambiante minimale 5°C i
Température ambiante maximale 35°C ii
Humidité ambiante maximale 95% à température constante
Suite page suivante
Caractéristiques du produit - CRB 15000 17
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.2 Caractéristiques techniques
Suite
Paramètre Valeur
Altitude ambiante maximale 0-2 000 m (100-84 kPa)
i À faible température < 10°C, comme pour toute autre machine, une phase de préchauffage est
recommandée. Sinon, le robot risque de s'arrêter ou de fonctionner à faible performance en raison
d'huile et de graisse dont la viscosité dépend de la température.
ii Higher ambient temperature may be possible, if duty cycle is reduced.
Classes de protection, robot
Le tableau présente les types de protection disponibles du robot, avec la classe
de protection correspondante.
Type de protection Classe de protection
Manipulateur, type de protection Standard IP54
Couples d'articulation
Dans les applications collaboratives, le couple d'articulation doit être pris en compte
dans l'analyse des risques. Le tableau suivant indique le couple maximal pour
chaque articulation. La valeur maximale peut être atteinte sur un axe à la fois.
Axe Couple d’articulation maximal
1 175,44 Nm
2 175,44 Nm
3 90,6 Nm
4 18,72 Nm
5 21,44 Nm
6 9,2 Nm
Autres informations techniques
Données Description Remarque
Niveau de bruit aérien Niveau de pression acoustique < 50,2 dB(A) Leq (conforméme-
en dehors de l'espace de tra- nt à la directive machine
vail. 2006/42/CE)
Mouvement : cube ISO (ISO
9283)
Vitesse TCP : 1500 mm/s
Consommation d'énergie pour une charge maximale
Remarque
La condition de tension minimale et la condition de tension maximale sont basées
sur une entrée de 230 V vers le système de commande.
Type de mouvement 5/0.95
Cube ISO (ISO 9283) 202
Vitesse max. (W)
Suite page suivante
18 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.2 Caractéristiques techniques
Suite
Robot en position d'étalonnage. 5/0.95
Freins engagés (W) 98
Freins desserrés (W) 136
E1 E2
E4 E3
A
xx1000000101
Rep Description
A 400 mm
Environnements explosifs
Le robot ne doit pas être placé ou manipulé dans un environnement explosif.
Limitations du rayon d'action
Il n'existe aucune limitation mécanique disponible.
Caractéristiques du produit - CRB 15000 19
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.3 Configuration des trous et vis de fixation
1.3.3 Configuration des trous et vis de fixation
Configuration des trous, base
Cette illustration représente la configuration des trous utilisée pour l'ancrage du
robot.
B B
+0,012 6.4
6 H7 0 7.5
135 4x 12
73 C
D
(214.8)
56
135
0 .018
C (2
)
+0
56
73
6
B-B
4
6.
D
xx2000002366
C Trou circulaire pour goujon de positionnement
Suite page suivante
20 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.3 Configuration des trous et vis de fixation
Suite
D Trou allongé pour goujon de positionnement
Vis de fixation
Le tableau ci-dessous indique le type de vis de fixation et de rondelle à utiliser
pour l'ancrage du robot dans la plaque d'assise/la fondation.
Vis appropriées M10x35
Quantité 4 pcs
Qualité 8,8
Rondelle appropriée 23/10,5/2,5 mm Acier
Goujons de guidage DIN6325, hardened steel Ø6x24 mm, 2 pcs
Couple de serrage 30 Nm ±10%
Exigences en matière de surface plane 0,1/500 mm
Caractéristiques du produit - CRB 15000 21
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.4 Montage de l'équipement sur le robot (dimensions du robot)
1.3.4 Montage de l'équipement sur le robot (dimensions du robot)
Remarque
Même après avoir fixé le robot à la fondation, ne vous appuyez pas sur celui-ci
ou ne placez pas de charges sur celui-ci, sauf ce qui est autorisé sur la bride
d’outil.
Dimensions du robot
La figure indique la dimension du robot.
470 101
80
110
444
265
xx2000002368
Montage de l'équipement sur le robot
Charge de l'équipement sur les bras du robot
Le bras du robot n’est pas conçu avec des trous de fixation pour les charges de
bras. Toutefois, pour les charges légères telles que les câbles, il est possible de
les monter directement sur le bras.
Remarques :
• Tout cheminement de câble externe le long du bras du robot doit être effectué
de manière flexible, en tenant compte du mouvement du robot et des dangers
associés au phénomène d’enchevêtrement.
Suite page suivante
22 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.4 Montage de l'équipement sur le robot (dimensions du robot)
Suite
• Les points de desserrage des freins sur chaque axe doivent être accessibles
dans l'application finale.
• Le bras supérieur peut manipuler une charge de 5 kg. Cela inclut le poids
des câbles, des outils et de la pièce (en cas de levage).
Bride d'outil
10.7
+0.015
6 H7 0 8 6.2
6.5 x 90
0.04
J
7 x M6 9
45°
0.2
+0.025
63 h7 -0.03
8x
0
0
31.5 H7
50
37
J J-J
xx2000002367
Qualité de la fixation sur la bride d’outil
Utilisez des vis d'une longueur et d’un couple de serrage adaptés à votre
application.
Des vis de classe de qualité 12,9 sont recommandées.
Caractéristiques du produit - CRB 15000 23
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.3.5 Configurer l’interface côté bras
1.3.5 Configurer l’interface côté bras
Introduction
L'interface côté bras est située sur l'axe 5, à l’opposé de la bride d'outil. La
configuration de l’interface côté bras s’effectue à l’aide de l’application Réglage
ASI sur le FlexPendant.
xx2000002420
A Bouton Haut (bouton convexe)
B Bouton Bas (bouton concave)
C Cercle lumineux
Conditions préalables
Une configuration de sécurité validée doit être configurée avant d'utiliser l'interface
côté bras. Voir Manuel sur les applications - SafeMove.
La charge utile doit être configurée avant de configurer l’interface côté bras. Voir
Manuel d’utilisation - OmniCore.
L'application Réglage ASI sur le FlexPendant doit être ouverte lorsque vous utilisez
les boutons.
24 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.4 Étalonnage du robot
1.4 Étalonnage du robot
Étalonnage du robot
Aucun étalonnage n’est nécessaire après l’installation.
L’étalonnage du décalage du capteur de couple après réparation est décrit dans
Manuel du produit - CRB 15000 .
Caractéristiques du produit - CRB 15000 25
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.5.1 Introduction
1.5 Diagrammes des charges
1.5.1 Introduction
AVERTISSEMENT
Il est primordial de toujours définir les données de charge réelle correctes et de
corriger la charge utile du robot. Des définitions incorrectes des données de
charge peuvent entraîner une surcharge du robot.
Si des données de charge et/ou des charges incorrectes (en dehors du
diagramme des charges) sont utilisées, les pièces suivantes peuvent être
endommagées par une surcharge :
• moteurs
• réducteurs
• structure mécanique
AVERTISSEMENT
La routine de service LoadIdentify est disponible dans le système de robot, ce
qui permet à l'utilisateur de définir automatiquement l'outil et la charge et de
déterminer les paramètres de charge appropriés.
Pour obtenir des informations détaillées, voir Manuel d’utilisation - OmniCore.
AVERTISSEMENT
Les robots fonctionnant avec des données de charge et/ou des charges en dehors
du diagramme de charges, ne seront pas couverts par la garantie du robot.
Généralités
Les diagrammes des charges comprennent une inertie de charge utile nominale
J0 de 0,012 kgm 2 .
Le diagramme de charge varie en fonction du moment d’inertie. Pour les robots
qui peuvent être montés inclinés, au mur ou inversés, les diagrammes de charge
tels qu’ils sont donnés sont valables.
La précision des fonctions de sécurité limitant la puissance et la force exige que
la charge utile soit correctement définie.
26 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.5.2 Schémas
1.5.2 Schémas
0.35
0.30
1.5 kg
0.25
2.0 kg
0.20
Z-distance (m)
2.5 kg
3.0 kg
0.15 3.5 kg
4.0 kg
4.5 kg
0.10 5.0 kg
5.1 kg
5.2 kg
0.05
0.00
0.00 0.05 0.10 0.15
L-distance (m)
Caractéristiques du produit - CRB 15000 27
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.5.3 Charge maximale et moment d'inertie pour mouvement d'axe 5 complet et limité à la verticale
1.5.3 Charge maximale et moment d'inertie pour mouvement d'axe 5 complet et
limité à la verticale
Remarque
Charge totale donnée en : masse en kg, centre de gravité (Z et L) en mètres et
moment d’inertie (Jox, Joy, Joz ) en kgm 2 . L= sqr (X 2 + Y 2 ), voir figure ci-dessous.
Mouvement complet de l'axe 5 (-180°/+180°)
Axe Type de robot Moment d'inertie maximal
5 CRB 15000-5/0.95 Ja5 = Load x ((Z+0.101)^2 + (L+0.08)^2)) + max (J0x, J0y) ≤
0.236 kgm 2
6 CRB 15000-5/0.95 Ja6 = Load x L 2 + J0Z ≤ 0.021 kgm 2
xx1400002028
Rep Description
A Centre de gravité
Description
Jox, Joy, Joz Moment d'inertie maximal autour des axes X, Y et Z au centre de gravité.
Suite page suivante
28 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.5.4 Couple de poignet
Suite
1.5.4 Couple de poignet
Remarque
Les valeurs sont indiquées à titre de référence uniquement et ne doivent pas
être utilisées pour le calcul du déport de la charge autorisé (position du centre
de gravité) dans le diagramme des charges, dans la mesure où elles sont limitées
par les couples des axes principaux et les charges dynamiques. De même, les
charges de bras influenceront le diagramme des charges autorisées.
Couple
Le tableau ci-dessous indique le couple maximum autorisé du fait de la charge
utile.
Type de robot Couple de poignet Couple de poignet Couple max. valide
max., axes 4 et 5 max., axe 6 en charge
CRB 15000-5/0.95 9,86 Nm 2,45 Nm 5 kg
Caractéristiques du produit - CRB 15000 29
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.5.5 Accélération TCP maximale
1.5.5 Accélération TCP maximale
Généralités
Des valeurs supérieures peuvent être atteintes avec des charges inférieures à la
charge nominale en raison de notre contrôle de mouvement dynamique
QuickMove2. Pour les valeurs spécifiques dans le cycle client unique ou pour les
robots non répertoriés dans le tableau ci-dessous, nous recommandons l'utilisation
de RobotStudio.
Accélération de conception cartésienne maximale pour les charges nominales
Type de robot Arrêt d'urgence Mouvement contrôlé
Accélération max. à la charge nomi- Accélération max. à la charge nomi-
nale COG [m/s 2 ] (valeur absolue) nale COG [m/s 2 ] (valeur absolue)
CRB 15000 61,6 36,9
Remarque
Les niveaux d'accélération pour l'arrêt d'urgence et le mouvement contrôlé
comprennent l'accélération due aux forces gravitationnelles. La charge nominale
est définie avec la masse nominale et le CdG avec un décalage max dans Z et
L (voir schéma de charge).
30 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.6 Maintenance et dépannage
1.6 Maintenance et dépannage
Généralités
En cours de fonctionnement, le robot requiert une maintenance minimale. Il a été
conçu pour un entretien aussi simple que possible :
• Des moteurs à courant alternatif ne nécessitant aucun entretien sont utilisés.
• De la graisse est utilisée pour les réducteurs.
• Le câblage est conçu pour une longue durée de vie et, en cas (peu probable)
de défaillance, sa conception modulaire facilite son remplacement.
Maintenance
Les intervalles de maintenance dépendent de l'utilisation du robot. Les opérations
de maintenance requises dépendent également des options sélectionnées. Pour
obtenir des informations détaillées sur les procédures de maintenance,
reportez-vous à la section Maintenance du Manuel du produit - CRB 15000 .
Caractéristiques du produit - CRB 15000 31
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.1 Rayon d’action
1.7 Mouvements du robot
1.7.1 Rayon d’action
Illustration, rayon d’action CRB 15000-5/0.95
Cette illustration représente le rayon d'action illimité du robot.
Pos 1
1216
Z
Pos 0
899
R951 R230.3
R199.4
287.6
Pos 6 Pos 8
Pos 4 272.7
Pos 2 265
0
X
Pos 5 179
Pos 7
Pos 3
686
0
951
507
470
507
951
230.2
198.1
xx2000002410
Positions au point d'intersection des axes 4-5-6 et à l’angle des axes 2 et 3
Position sur la fi- Positions au niveau du centre du Angle (en degrés)
gure poignet (mm)
X Z axe 2 axe 3
pos0 470 899 0° 0°
pos1 0 1216 0° -68°
pos2 951 265 90° -68°
pos3 0 -686 180° -68°
pos4 -951 265 -90° -68°
pos5 -507 -179 180° 22°
pos6 -230.2 272.7 180° 85°
Suite page suivante
32 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.1 Rayon d’action
Suite
Position sur la fi- Positions au niveau du centre du Angle (en degrés)
gure poignet (mm)
X Z axe 2 axe 3
pos7 507 -179 180° -158°
pos8 198.1 287.6 180° -225°
Rayon de rotation
+180°
Y
R199.4
X
R173.1
-180°
R951
xx2100000122
A Rayon de rotation minimal de l'axe 1
Rayon d'action
Axe Rayon d'action Remarque
Axe 1 ±180° Dans le cas des robots à montage mural, la
zone de travail pour l’axe 1 est fonction de la
charge utile et des positions des autres axes.
Il est recommandé de procéder à une simula-
tion dans RobotStudio.
Axe 2 ±180°
Suite page suivante
Caractéristiques du produit - CRB 15000 33
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.1 Rayon d’action
Suite
Axe Rayon d'action Remarque
Axe 3 -225°/+85°
Axe 4 ±180°
Axe 5 ±180°
Axe 6 ±180°
34 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.2 Performances conformes à la norme ISO 9283
1.7.2 Performances conformes à la norme ISO 9283
Généralités
Pour une charge nominale maximale, un décalage maximal et une vitesse de 1,6
m/s sur le plan de test ISO incliné, avec les six axes en mouvement. Les valeurs
du tableau ci-dessous correspondent au résultat moyen des mesures sur un petit
nombre de robots. Le résultat peut varier en fonction de la position du robot dans
le rayon d'action, de la vitesse, de la configuration de bras, du sens d'approche
de la position, du sens de la charge sur le système de bras. Les jeux dans les
réducteurs affectent également le résultat.
Les valeurs pour AP, RP, AT et RT sont mesurées conformément à l'image
ci-dessous.
xx0800000424
A Position programmée
B Position moyenne durant l'exécution du programme
AP Distance moyenne de la position programmée
RP Tolérance de la position B à l'exécution répétée du programme
D Trajectoire réelle à l'exécution du programme
E Trajectoire programmée
AT Ecart maximal entre E et la trajectoire moyenne
RT Tolérance de la trajectoire à l'exécution répétée du programme
CRB 15000 5/0.95
Répétabilité de pose, RP (mm) 0,05
Caractéristiques du produit - CRB 15000 35
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.3 Vitesse
1.7.3 Vitesse
Vitesse maximale des axes
Type de robot Axe 1 Axe 2 Axe 3 Axe 4 Axe 5 Axe 6
CRB 15000-5/0.95 125 °/s 125 °/s 140 °/s 200 °/s 200 °/s 200 °/s
Une fonction de surveillance permet d'éviter toute surchauffe dans le cas
d'applications qui provoquent des mouvements intensifs et fréquents (cycle de
fonctionnement élevé).
Résolution d'axe
0,001° à 0,005°.
36 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.7.4 Distances et temps d'arrêt du robot
1.7.4 Distances et temps d'arrêt du robot
Introduction
Les distances et temps d'arrêt pour les arrêts de catégorie 0 et 1, conformément
à la norme EN ISO 10218-1 Annex B, sont répertoriés dans Product
specification - Robot stopping distances according to ISO 10218-1
(3HAC048645--001).
Caractéristiques du produit - CRB 15000 37
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.8 Connexions du client sur le manipulateur
1.8 Connexions du client sur le manipulateur
Introduction
Les câbles du client sont acheminés en interne avec le faisceau de câbles du
manipulateur.
Câbles du client
Connexion du Spécification Référence Classement da- Remarque
client des câbles ns chaque fil i
Customer power Le câble brut est Voir Manuel du 24V ii 2A Acheminé en in-
(CP) une paire torsa- produit, pièces terne avec le fais-
dée 1x2xAWG24 détachées - CRB ceau de câbles
15000 du manipulateur.
Customer signal Câble Voir Manuel du 24V iii 500mA Acheminé en in-
(CS) 2x2xAWG26 en produit, pièces terne avec le fais-
4x2XAWG26 détachées - CRB ceau de câbles
15000 du manipulateur.
i Les contraintes supérieures à la limite peuvent endommager le manipulateur de manière irréversible.
ii 24 V nominale, 30 V max
iii 24 V nominale, 30 V max
Connecteurs du client sur le manipulateur
Connecteurs sur la base
Le R1.MP sur la base sert à transférer le bus CC, EtherCat et les signaux du client
(CP/CS).
xx2100000228
Suite page suivante
38 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.8 Connexions du client sur le manipulateur
Suite
Rep Type de connecteur Implantation
R1.MP Connecteur mâle rotatif à angle de 2 4
réception avec boîtier et insert.
1 5
M23 x 1
3 6
D A
C B
PE
xx2100000221
- La fiche avec connecteur femelle 5
4 2
1
comprend un boîtier et un insert. 6 3
28
A D
B C
PE
xx2100000229
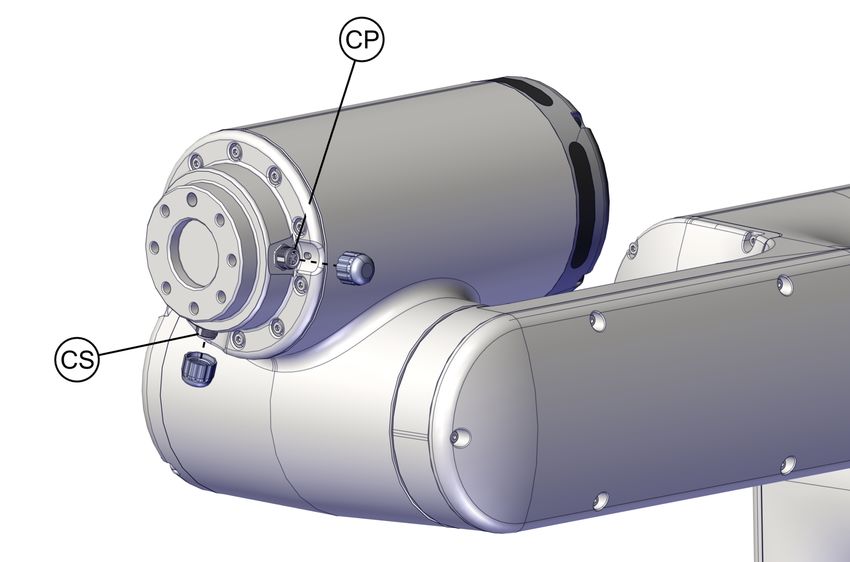
Connecteurs sur la bride d'outil
xx2100000125
ATTENTION
Utilisez toujours des capuchons de protection sur les connecteurs non utilisés
du client afin de protéger le connecteur et de recouvrir les bords tranchants du
connecteur.
Remarque
Vérifiez toujours que le connecteur n'est pas sale ou endommagé avant de le
connecter. Nettoyez ou remplacez toutes les pièces endommagées.
Suite page suivante
Caractéristiques du produit - CRB 15000 39
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.1 Description
1.8 Connexions du client sur le manipulateur
Suite
Rep Type de connecteur Couple d’accou- Implantation
plement/désac-
couplement
CP Fil M8 femelle 3 broches, 0,4 Nm Pin3
Pin4
Pin1
M10x0.75
200 mm, droit
(Deux broches à utiliser,
une broche de rechange)
M8x1
xx2100000220
CS Fil M8 femelle 4 broches, 0,4 Nm Pin4 Pin2
200 mm, droit M10x0.75 Pin3 Pin1
M8x1
xx2100000219
40 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.1 Présentation des variantes et options
2 Spécifications des variantes et options
2.1 Présentation des variantes et options
Généralités
Les différentes variantes et options du CRB 15000 sont décrites dans les sections
suivantes. Les numéros d'options utilisés ici sont les mêmes que ceux utilisés
dans la fiche technique.
Les variantes et options relatives au système de commande du robot sont décrites
dans les caractéristiques de produit du système de commande du robot.
Caractéristiques du produit - CRB 15000 41
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.2 Manipulateur
2.2 Manipulateur
Variantes de manipulateur
Option Variante Capacité de manutention Portée (m)
(kg)
3300-19 CRB 5 0,95
15000-5/0.95
Protection de manipulateur
Option Description
3350-540 Base 54, IP54
Garantie
Pendant la période sélectionnée, ABB fournira des pièces de rechange ainsi que
de la main d'œuvre pour réparer ou remplacer la partie non-conforme de
l'équipement sans frais supplémentaires. Durant cette période, il est nécessaire
de faire intervenir ABB pour effectuer une Maintenance préventive annuelle
conformément aux manuels ABB. Si, en raison de restrictions du client, aucune
donnée ne peut être analysée dans le module ABB Ability Condition Monitoring &
Diagnostics pour les robots équipés de systèmes de commande OmniCore, et
qu’ABB doit se déplacer jusqu’au site, les frais de déplacement ne sont pas
couverts. La période de garantie étendue commence toujours le jour de l’expiration
de la garantie. Les conditions de la garantie s'appliquent comme défini dans les
conditions générales.
Remarque
La description ci-dessus n’est pas applicable pour l'option Stock warranty [438-8]
Option Type Description
438-1 Garantie standard La garantie standard est de 12 mois à compter de la
date de livraison au client ou au plus tard 18 mois après
la date d'expédition d'usine (selon la première éventua-
lité à survenir). Les conditions générales de la garantie
s'appliquent.
438-2 Garantie standard + 12 Garantie standard étendue 12 mois à compter de la date
mois de fin de garantie standard. Termes de la garantie et
application des conditions. Contactez le service client
en cas d'autres exigences.
Suite page suivante
42 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.2 Manipulateur
Suite
Option Type Description
438-8 Garantie de stock Le début de la garantie standard peut être différé de
maximum 6 mois, à partir de la date d'expédition
d'usine.Veuillez noter qu'aucune réclamation ne sera
acceptée pour les garanties qui ont eu lieu avant la fin
de la garantie de stock. La garantie standard commence
automatiquement après 6 mois à compter de la date
d'expédition d'usine ou à partir de la date d'activation
de la garantie standard dans WebConfig.
Remarque
Des conditions spéciales sont applicables ; voir les dire-
ctives de garantie robotique.
Caractéristiques du produit - CRB 15000 43
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.3 Câbles au sol
2.3 Câbles au sol
Longueur de câble du manipulateur
Option Longueurs
3200-2 7m
Câble secteur
Option Longueurs Description
3203-1 Câble secteur UE, 3 m Ensemble câble avec connecteur
CEE7/VII côté secteur
3203-5 Câble secteur CN, 3 m Ensemble câble avec connecteur
CPCS-CCC côté secteur
3203-6 Câble secteur AU, 3 m Ensemble câble avec connecteur
AS/NZS 3112 côté secteur
44 Caractéristiques du produit - CRB 15000
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.Index
Index Interface côté bras
description, 24
A M
ancrage du robot dans la fondation, vis de fixation, 21 mise en place, équipement, 22
ASI, 14, 24 montage, équipement, 22
C N
catégorie 0, arrêt, 37 normes, 12
catégorie 1, arrêt, 37 ANSI, 12
charges sur la fondation, 15 CAN, 12
classes de protection, 18 EN IEC, 12
conditions d'entreposage, 17 EN ISO, 12
conditions de fonctionnement, 17 normes de sécurité, 12
couples sur la fondation, 15 normes des produits, 12
D O
dimensions options, 41
robot, 22
distances d'arrêt, 37 P
poids, 15
E
équipement, robot, 22 R
équipement supplémentaire, 22 rayon d'action, 33
ERSH, 9 rayon de rotation, 33
évaluation du risque pour la santé humaine, 9 Rayon d’action du
exigences sur la fondation, 16 robot, 32
réglage ASI, 24
F robot
fondation classe de protection, 18
exigences, 16 dimensions, 22
équipement, mise en place, 22
G rayon d’action, 32
garantie, 42
types de protection, 18
garantie de stock, 42
garantie standard, 42 T
température ambiante
H entreposage, 17
humidité
fonctionnement, 17
entreposage, 17
températures
fonctionnement, 17
entreposage, 17
humidité ambiante
fonctionnement, 17
entreposage, 17
temps d'arrêt, 37
fonctionnement, 17
type de protection, 18
I U
installation
usage prévu, 9
équipement, 22
instructions d'assemblage, 14 V
instructions d’assemblage, 14 variantes, 41
interface côté bras, 14
Caractéristiques du produit - CRB 15000 45
3HAC077390-004 Révision: A
© Copyright 2021- ABB. Tous droits réservés.ABB AB
Robotics & Discrete Automation
S-721 68 VÄSTERÅS, Sweden
Telephone +46 (0) 21 344 400
ABB AS
Robotics & Discrete Automation
Nordlysvegen 7, N-4340 BRYNE, Norway
Box 265, N-4349 BRYNE, Norway
Telephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.
Robotics & Discrete Automation
No. 4528 Kangxin Highway
PuDong District
SHANGHAI 201319, China
Telephone: +86 21 6105 6666
ABB Inc.
Robotics & Discrete Automation
1250 Brown Road
Auburn Hills, MI 48326
USA
Telephone: +1 248 391 9000
abb.com/robotics
3HAC077390-004, Rev A, fr
© Copyright 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.Vous pouvez aussi lire