Un prototype pour la trajectographie PPP (Positionnement Ponctuel Précis) à l'IGN - Samuel BRANCHU Service de Géodésie et Nivellement
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Un prototype pour la
trajectographie PPP
(Positionnement
Ponctuel Précis) à l'IGN
Samuel BRANCHU
Service de Géodésie et Nivellement
1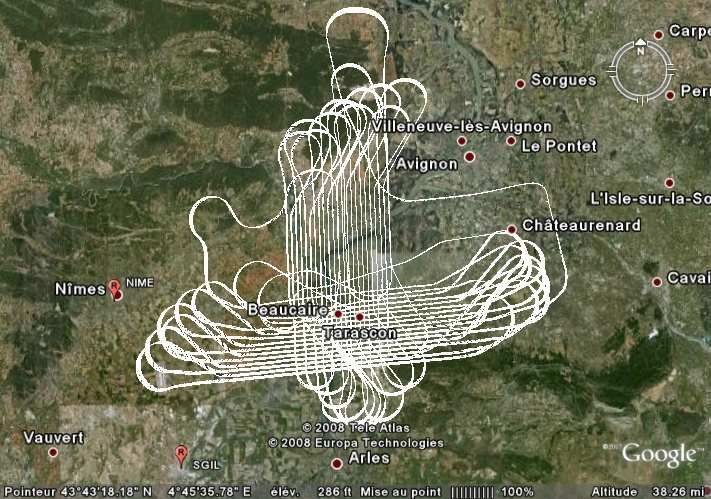
Un prototype pour la
trajectographie PPP
Contexte : L’IGN producteur de données géolocalisées.
Large utilisation des GNSS en mode différentiel :
• Développement du Réseau GNSS Permanent
• Cinématique (trajectographie)
Missions aériennes : prise de vues et lidar
Levés linéaires pour la mise à jour des Bases de données
etc.
• Statique
Positionnement géodésique
Points d’appui pour l’aérotriangulation
etc.
2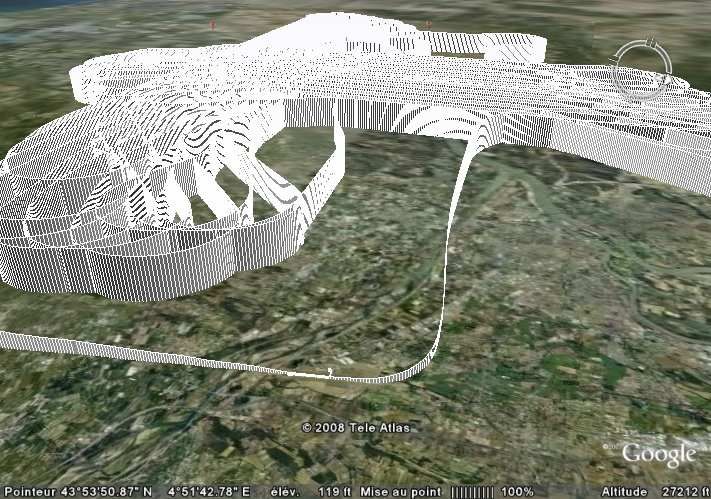
Un prototype pour la
trajectographie PPP
Contexte : L’IGN producteur de données géolocalisées.
Utilisateur de logiciels …
Calculs de réseaux de référence : Bernese GPS Software
(actuellement 5.0) futur Bernese GNSS Software (5.2)
Autres calculs : logiciels type Leica Geo Office
offre du marché
• calculs GPS différentiels bien maîtrisés (GNSS ?).
• PPP en développement depuis plusieurs années.
2007 : offre PPP insuffisante
3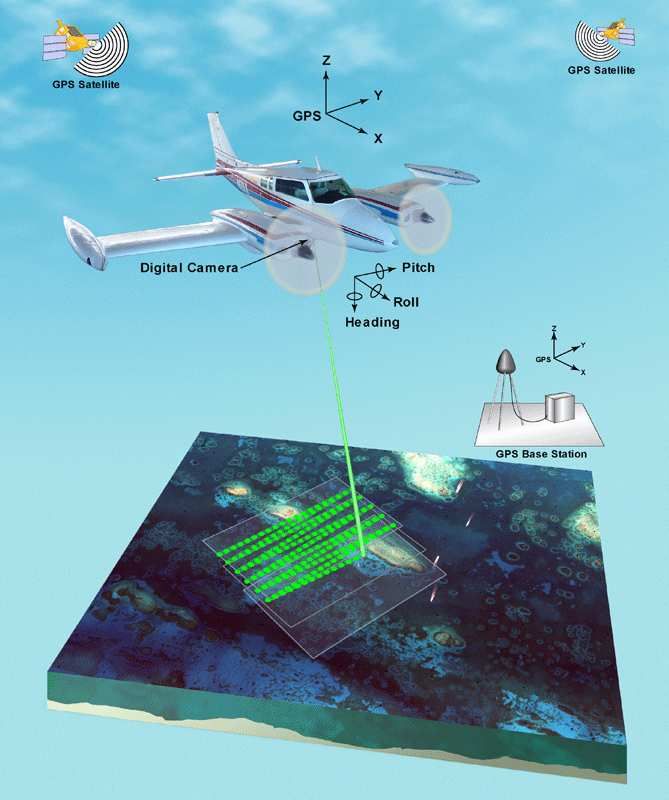
Un prototype pour la
trajectographie PPP
Antenne Contexte : Prise de vues
GPS aériennes & calcul
d’aérotriangulation (Service des
Activités Aériennes et Service
des Bases de Données Image)
Sommet de
prise de vue Trajectographie :
-Positionnement cinématique de
l’antenne GPS
- Interpolation du positionnement
de chaque sommet de prise de
vue (non synchronisé)
4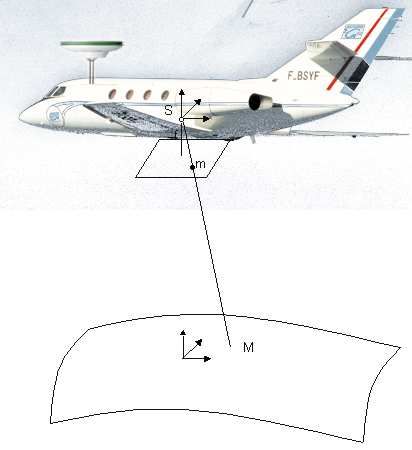
Un prototype pour la
trajectographie PPP
Antenne
GPS • Processus en 2007
- Ancien, à moderniser
- traitement différentiel (si station
sol …)
Sommet de
prise de vue
• But du développement du
PPP :
Remplacer ce processus
5
Un prototype pour la
trajectographie PPP
Contexte : LIDAR litto3D
• Trajectographie :
- Positionnement cinématique
du centre de phase de l’antenne GPS
• Processus en 2007 :
- Traitement différentiel (stations sol)
- Chaîne POSPac d’Applanix
• But du développement du PPP :
Valider le processus
6Un prototype pour la
trajectographie PPP
7Un prototype pour la
trajectographie PPP
Qu’est-ce qu’une observation GPS ?
1 satellite – 1 récepteur
centre de masse du satellite
centres de phase du satellite
émission époque
trajet
MESURES DE CODE ET DE
PHASE
réceptio époque
n
centres de phase de
l’antenne
point de référence de
l’antenne
8Un prototype pour la
trajectographie PPP
Du côté du satellite
centre de masse du satellite éphémérides
décalages ERP
centres de source
phase commune
centres de phase du satellite
émission époque décalages
d’horloge
Ephémérides et horloges des satellites ; paramètres d’orientation de
la Terre
Contraintes :
• utiliser les 3 produits d’une même source (corrélations, biais …)
• calculs PPP en temps différé … mais pas trop
• la meilleure précision (=> horloges prédites impossibles, erreurs
métriques)
• horloges échantillonnées à 30 secondes pour interpolation 9Un prototype pour la
trajectographie PPP
Du côté du satellite
centre de masse du satellite éphémérides
décalages ERP
centres de source
phase commune
centres de phase du satellite
émission époque décalages
d’horloge
Solution 1 :
CODE (Center for Orbit Determination in Europe)
Solution 2 :
IGN : développement des orbites SGU ; possibilité de calcul rapide
dans les heures qui suivent
10Un prototype pour la
trajectographie PPP
Entre parenthèses … Pourquoi développer l’orbitographie à l’IGN ?
But : Calculer en temps réel les éphémérides des satellites GPS et
leurs paramètres d’horloge
Besoins :
• Possibilité de calculer la trajectographie « à la descente de
l’avion »
• Centre opérationnel du Réseau GPS Permanent, pour les calculs
de paramètres troposphériques horaires
• Participation de l’IGN comme centre d’analyse de l’IGS
11Un prototype pour la
trajectographie PPP
Les décalages d’horloge
émission époque décalages
d’horloge
trajet
MESURES DE CODE ET DE
PHASE
réceptio époque décalages
n d’horloge
Equation d’observation : terme en δi – δk (horloge satellite – horloge
récepteur)
GPS différentiel :
• Simple différence sur 2 satellites (SD) : disparation du terme en δk,
reste δi - δj.
• Double différence sur 2 satellites et 2 récepteurs (DD) : disparition
de tous les termes d’horloges.
12Un prototype pour la
trajectographie PPP
Les décalages d’horloge
émission époque décalages
d’horloge
trajet
MESURES DE CODE ET DE
PHASE
réceptio époque décalages
n d’horloge
PPP : les termes d’horloge restent.
Les décalages d’horloge des satellites sont tous fixés en PPP.
Ils sont interpolés à chaque époque d’observation.
Les décalages d’horloge des récepteurs : 1 inconnue par époque.
13Un prototype pour la
trajectographie PPP
Du satellite au récepteur
émission époque
Délai ionosphérique
délai ionosphérique
trajet Valeur importante (métrique)
mais solution simple en GPS
bifréquence
réfraction ionosphérique
MESURES DE CODE ET DE
approximativement
PHASE
réceptio époque proportionnelle à 1/f2
n → délai iono sur L2 proportionnel
au délai iono sur L1
combinaison linéaire des
observations « iono-free » L3
14Un prototype pour la
trajectographie PPP
Du satellite au récepteur
émission époque
Délai troposphérique
délai ionosphérique
trajet
délai
Valeur importante (métrique)
troposphérique modélisée (Saastamoinen + dry
Niell).
Corrections (déci- ou
centimétriques) au modèle : 1
MESURES DE CODE ET DE
PHASE paramètre toutes les 5 minutes.
réceptio époque
n
15Un prototype pour la
trajectographie PPP
Du côté du récepteur
émission époque Autres effets …
délai ionosphérique
trajet
délai
troposphérique
( phase wind up )
( multi-trajet )
( bruit du récepteur
)
MESURES DE CODE ET DE
PHASE
réceptio époque
n
AERAT2775_43 NONE
16Un prototype pour la
trajectographie PPP
Du côté du récepteur : Les ambiguïtés
émission époque Limitation du PPP :
ambiguïtés réelles.
délai ionosphérique
trajet
délai
ZD : ambiguïté réelle
troposphérique
( phase wind up )
= biais dû au satellite
( multi-trajet )
+ biais dû au récepteur
( bruit du récepteur
+ ambiguïté entière
)
MESURES DE CODE ET DE ambiguïtés SD : élimination des termes dus au
PHASE
réceptio époque récepteur
n
DD : élimination des termes dus aux
récepteurs et aux satellites
17Un prototype pour la
trajectographie PPP
Du côté du récepteur : Les ambiguïtés
émission époque PPP : Il n’y a pas de
« fixation » des ambiguïtés.
délai ionosphérique
trajet
délai
Les solutions sont plus longues à
troposphérique
( phase wind up )
converger.
( multi-trajet )
Axes de recherches depuis
( bruit du récepteur
) quelques années : Méthodes de
MESURES DE CODE ET DE ambiguïtés fixation des ambiguïtés en SD ou
PHASE ZD (différence des observations sur
réceptio époque
n
les deux fréquences).
18Un prototype pour la
trajectographie PPP
Du côté du récepteur
Calibrations d’antenne.
réceptio époque
n
centres de phase de
l’antenne
décalages
centres de
phase
point de référence de positions
l’antenne
19Un prototype pour la
trajectographie PPP
Lissage des observations
Observations bifréquences de code et de phase.
• Détection des observations hors-normes (avec un
seuil assez élevé du fait de l’utilisation du code, alors
qu’en différentiel on utilise la phase),
• Détection des sauts de cycle,
• Lissage des mesures de code, qu’on peut alors
considérer comme des observations de phase dont
les ambiguïtés ont été résolues approximativement.
20Un prototype pour la
trajectographie PPP
Paramètres à déterminer
émission époque
A chaque époque :
trajet
•1 position tridimensionnelle
délai •1 décalage d’horloge
troposphérique
Communs à plusieurs
époques successives :
MESURES DE CODE ET DE ambiguïtés • ambiguïté satellite-
PHASE récepteur (entre deux sauts
réceptio époque décalages
n d’horloge
centres de phase de de cycle)
l’antenne
• délai troposphérique
(toutes les 5 minutes)
point de référence de positions
l’antenne
21Un prototype pour la
trajectographie PPP
Paramètres à déterminer
émission époque
Résolution :
trajet
• équations d’observation
délai posées époque par époque
troposphérique
• pré-élimination des
paramètres d’époque
• résolution des ambiguïtés
MESURES DE CODE ET DE ambiguïtés
et de la troposphère
PHASE
réceptio époque décalages
• back-substitution et
n
centres de phase de
d’horloge résolution des paramètres
l’antenne d’époque
D’où la trajectographie de
point de référence de
l’antenne
positions l’ARP
22Un prototype pour la
trajectographie PPP
Sommet de
Prise de Vue
Observation GPS sous-échantillonnée (3s)
Calcul Bernese cinématique
Observation GPS densifiée (0.6s)
Calcul « Bernese » (développement IGN)
Top Prise de Vue
Position interpolée
23Un prototype pour la
trajectographie PPP
Développements Bernese IGN (Alain Harmel)
DENSIFICATION
?
0.0 s 0.6 s 1.2 s 1.8 s 2.4 s 3.0 s 3.6 s 4.2 s 4.8 s 5.4 s 6.0 s
24Un prototype pour la
trajectographie PPP
Une trajectographie : quel point, quelle référence ?
point de référence de positions
l’antenne
rattachement
sommet de prise de vue
correction de marée terrestre
correction de surcharge océanique
coordonnées finales en IGSxx
époque
Mise en référence
locale
coordonnées finales dans le système officiel
local
25Un prototype pour la
trajectographie PPP
Rattachement du sommet de prise de vue
1. Rattachement temporel
X(t)
INTERPOLATION
TOPS PVA
X(t)
Interpolation de Lagrange sur n points
⇒ Polynôme de degré n-1
En pratique : 4 points ( 3ème degré)
La dérivée (vecteur vitesse) est prise en compte pour le
rattachement antenne GPS → capteur 26Un prototype pour la
trajectographie PPP
zA
Rattachement du sommet de prise de vue
2. Rattachement spatial
Position sommet PVA = xA
Position antenne GPS
+ [ (vecteur antenne-caméra au sol
+ stabilisation en vol) /avion ] /sol
Quel est le temps de pose ?
(10 ms × 100 m/s = 1 m)
yA
Non résolu ? => biais / bande,
estimé à l’aérotriangulation
27Un prototype pour la
trajectographie PPP
Corrections
• marée terrestre
• surcharge océanique
Sol instantané (marées…)
Sol moyen (celui qu’on cartographie!)
28Un prototype pour la
trajectographie PPP
Correction de marée terrestre
• amplitude : jusqu’à quelques décimètres
• désactivée dans le calcul Bernese
• éphémérides du JPL DE200
• calcul de correction de position due à la marée (attraction du
Soleil et de la Lune)
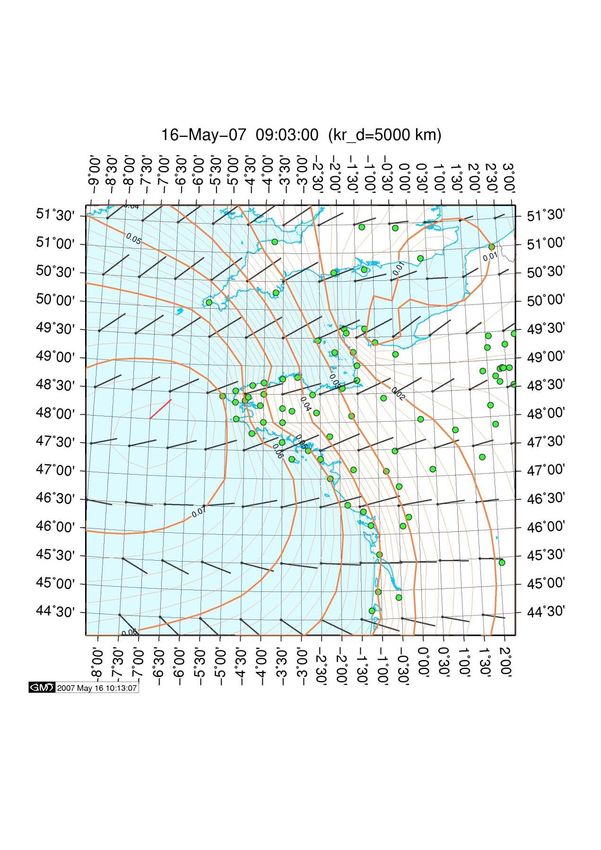
Correction de surcharge océanique
• amplitude : jusqu’à quelques centimètres
• désactivée dans le calcul Bernese
• les coefficients de la surcharge sont connus en des points
bien répartis
• ils sont interpolés par krigeage à chaque position (époque)
• la correction de position en est déduite
29Un prototype pour la
trajectographie PPP
Amplitude des corrections
de surcharge océanique
30Un prototype pour la
trajectographie PPP
Une trajectographie : quel point, quelle référence ?
point de référence de positions
l’antenne
rattachement
sommet de prise de vue Mise en référence locale
correction de marée terrestre Application de
correction de surcharge océanique
paramètres de
coordonnées finales en IGSxx transformation
époque
Mise en référence
locale
coordonnées finales dans le système officiel
local
31Un prototype pour la
trajectographie PPP
Utilisation du logiciel
• Calculs de trajectographie de PVA / lidar de production
pour comparaison avec la méthode différentielle.
• Calculs de trajectographie de PVA / lidar de production où
la méthode différentielle est impossible (pas de station de
référence) (IFI).
• (2009) Stage ENSG IT3 M. A. EL YAHMADI "Traitement
et Analyse des délais troposphériques issus des données
d’un récepteur GPS bifréquence embarqué sur un navire"
(Marseille-Ajaccio, projet VAPIMED de l'INSU).
• Trajectographie de véhicules automobiles terrestres (unité
de Travaux Spéciaux, SGN).
32Un prototype pour la
trajectographie PPP
Limitations du logiciel
Obligatoire : observations GPS bifréquences .
Pour obtenir la meilleure précision :
• conditions ionosphériques et troposphériques modérées
• au moins deux heures d’observations continues ; la perte
de réception de satellites masqués est à éviter (problème
pour véhicules terrestres).
33Un prototype pour la
trajectographie PPP
Bilan provisoire
• le prototype est resté prototype
• le SAA utilise des progiciels : solutions tout intégrées
différentiel mono/multi bases et PPP
• question d'assurance qualité
• mais il reste utile entre des mains expertes …
Futur
• couplage inertiel / GNSS
• Bernese 5.2 (Glonass …)
• PPP maison
• progiciels
• intégration des nouveaux algorithmes de résolution des
ambiguïtés entières.
34Un prototype pour la
trajectographie PPP
L’interface
Options Options
PVA LIDAR
3536
Vous pouvez aussi lire