Campagne de recrutement sur contrats doctoraux 2019 Institut P'
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Campagne de recrutement sur contrats doctoraux 2019
Institut P’
Développement d’un bras à câble pour robots humanoïdes – Application à la marche
robotisée
Institut/Département : Institut Pprime / Génie Mécanique et Systèmes Complexes
Equipe : ROBIOSS
Directeur(s) de thèse : T. MONNET
Co-encadrant(s) : A. EON
Contact pour information :
Antoine EON – Maître de Conférences, IUT de Poitiers, Institut Pprime
antoine.eon@univ-poitiers.fr
Tony MONNET – Maître de Conférences HDR, FSS, Université de Poitiers, Institut Pprime
tony.monnet@univ-poitiers.fr
Mot-clés: Robotique humanoïde, Conception mécanique, Synthèse optimale, Biomécanique
Contexte.
La conception et la mise en œuvre de robots humanoïdes est encore un challenge pour la
communauté scientifique internationale. Peu de robots possèdent actuellement des capacités
de déplacement réellement compétitives en environnement incertain. On peut citer les robots
des sociétés Boston Dynamics et Schaft comme étant les réalisations les plus avancées dans
ce domaine. Ces bonnes capacités résultent d’une conception mécanique saine et robuste
d’une part, et d’autre part d’algorithmes de contrôle-commande performants, aptes à rejeter
rapidement une perturbation extérieure. La conception doit prendre en compte l’intégration
mécatronique mais également une répartition optimale des masses. Une solution
technologique intéressante, notamment pour la réalisation des bras est l’utilisation de
mécanismes à câbles. Ce type d’architecture n’est pas ou peu représenté dans la littérature et
présente une voie de recherche à développer.
Le sujet de thèse proposé ici s’intègre dans les activités de recherche du thème «Humanoïde et
humain : synthèse de mouvements dynamiques» de l’équipe Robioss (Robotique
Biomécanique Sport et Santé) du département Génie Mécanique et Systèmes Complexes de
l’institut PPrime de Poitiers. Ce thème s’inscrit dans la continuité des travaux initiés au début
des années 90 qui portent sur le développement de codes de calcul symbolique et de
générateurs de mouvements optimaux pour robots sériels et humanoïdes. Ces travaux ont
parallèlement conduit à la conception du robot marcheur BIP (cf. fig. 1), à 15 Degrés De
Liberté (DDL), qui fut présent à l’exposition universelle de Hanovre en 2000 et d’un système
locomoteur de petite taille, TIDOM (cf. fig. 2) à 12 DDL.
Programme de l’étude, moyens mis en oeuvre
Actuellement, la mise à jour du robot BIP (cf. fig. 3), avec l’implantation de nouveaux
moteurs et le passage du contrôle-commande sous l’environnement industriel B&R
Automation, est terminée (cf. Gastebois2017). La plateforme, de taille humaine adulte (deux
jambes à six degrés de liberté chacune et un ensemble pelvis/tronc à trois degrés de liberté)
est opérationnelle. Elle dispose d’un simulateur permettant la génération et la validation de
trajectoires et de lois de commande. Un stabilisateur postural innovant a été proposé pour une
jambe à 4DDL (cf. Gastebois2017). Ce dernier se base sur le placement du robot dans le
champ gravitationnel, à l’aide de forces de répulsion de type électrostatique, appliquées à un
modèle virtuel dégradé du robot. Cette approche est extensible au corps complet. Un
contrôleur orienté objet a été développé spécifiquement afin d’accompagner la
complexification du robot (15ddl pour l’appareil locomoteur complet actuellement à 23 ddl
minimum pour le robot avec ses bras). Cette conception mécanique très saine constitue donc
une base idéale au développement d’un robot plus complexe, enrichi de nouvelles
fonctionnalités.
Fig. 3. Robot humanoïde BIP V2
Fig. 1. Robot humanoïde BIP Fig. 2. Robot humanoïde TIDOM
Des travaux précédents ont permis de montrer l’influence des bras dans la maîtrise de la
dynamique du robot, et celle de son contact au sol (Eon2009) lors de mouvements à forte
dynamique (marche rapide, saut). La première partie du travail proposé dans cette thèse sera
donc la conception de deux bras, destinés au robot BIP, permettant ainsi d’explorer ces
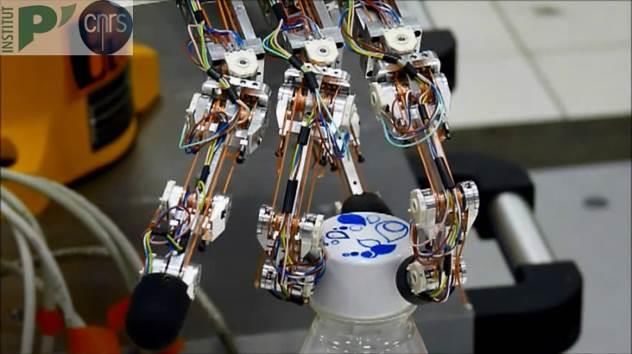
phénomènes expérimentalement. Du point de vue technologique, les bras s’inspireront de
l’architecture cinématique des doigts à transmission par câbles développés dans l’équipe (cf.
fig. 4 et 5, Mnyusiwalla2016, brevet mondial CNRS – Université de Poitiers). Cette dernière a
pu montrer son haut niveau de performance en termes de compacité, de minimisation des
frottements et des couplages mécaniques grâce notamment à un routage spécifique des câbles
de transmission. La compliance naturelle des câbles favorise également l’interaction sûre avec
l’environnement et permet la perception des efforts de contact en fonction de l’allongement
des câbles.
Fig. 4. Doigt modulaire Fig. 5. Nouvelle main ROBIOSS à 16 DDL
La deuxième partie du sujet s’attachera à développer un générateur de mouvements optimaux
pour le robot équipé de ses bras, basé sur les travaux précédents de l’équipe (cf. Seguin2003,
Fatoux2014). L’analyse du mouvement humain (mesuré à l’aide de la plateforme HuManS de
l’équipe Robioss, cf. fig. 6) permettra de valider les approches et les critères retenus en
confrontant les mouvements synthétisés et ceux mesurés chez l’humain. Des travaux récents
(Pontzer2009, Meyns2013) ayant montré le caractère passif de ce mouvement des bras chez
l’humain lors de la marche et la course, ce mode de fonctionnement pourra être envisagé et
comparé par rapport à un mouvement actif pour l’architecture retenue.
Fig. 6. Plateforme d’analyse du mouvement HuManS
Profil du candidat, prérequis
De formation universitaire de haut niveau ou issu d’une grande école d’ingénieur, le candidat
recruté devra présenter un fort goût pour la technologie ainsi que de solides compétences en
conception mécanique, en robotique et en biomécanique. Rigueur et bonne capacité
rédactionnelle sont exigées.
Bibliographie :
Gastebois2017 : J. GASTEBOIS, « Contribution à la commande temps réel des robots
marcheurs - Application aux stratégies d’évitement des chutes », Thèse de doctorat,
Université de Poitiers, 2017 ;
Mnyusiwalla2016 : H. Mnyusiwalla, P. Vulliez, J. P. Gazeau and S. Zeghloul, "A New
Dexterous Hand Based on Bio-Inspired Finger Design for Inside-Hand Manipulation," in
IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 46, no. 6, pp. 809-
817, June 2016.
Fatoux2014 : J. FATOUX, « Mise en œuvre d'un robot humanoïde et contribution à la
génération de marches dynamiques optimales», Thèse de doctorat, Université de Poitiers,
2014 ;
Eon2009 : A. EON, « Contribution à la génération de mouvements dynamiques pour les
robots humanoïdes et au dimensionnement de leurs actionneurs », Thèse de doctorat,
Université de Poitiers, 2009 ;
Seguin2003 : P. SEGUIN, « Développement d'une technique d'optimisation paramétrique
pour la synthèse de mouvements à dynamique régulière : application à la marche», Thèse
de doctorat, Université de Poitiers, 2003 ;
Pontzer2009 : Herman Pontzer, John H. Holloway, 4th, David A. Raichlen, Daniel E.
Lieberman, Control and function of arm swing in human walking and running, Journal of
Experimental Biology 2009 212: 523-534; doi: 10.1242/jeb.024927
Meyns2013 : Pieter Meyns, Sjoerd M. Bruijn, Jacques Duysens, The how and why of arm swing during human walking, Gait & Posture, Volume 38, Issue 4, 2013, Pages 555-562, ISSN 0966-6362, https://doi.org/10.1016/j.gaitpost.2013.02.006. Brevet Mondial CNRS – Université de Poitiers : WO2016059121 (A1) - MODULAR ROBOTIC FINGER FOR GRASPING AND DEXTEROUS HANDLING Chaîne Youtube : https://www.youtube.com/channel/UCfRa9sm-Yk-Fbenh3UGUR7A
Vous pouvez aussi lire

















































