Cours d'introduction sur la technologie Lidar - Le Système d'Information du Territoire Neuchâtelois - Géoportail du SITN
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Département du développement territorial et de l’environnement - Service de la Géomatique et du Registre Foncier
Le Système d’Information du Territoire Neuchâtelois
Cours d’introduction sur la technologie Lidar
Marc Riedo - Mai 2019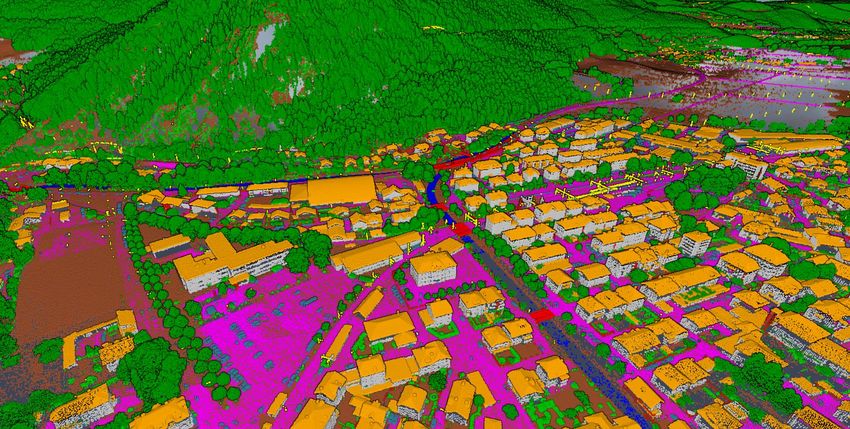
Objectifs du cours
• Connaître le principe général de fonctionnement d’un système LiDAR (Light Detection and Ranging)
• Avoir une bonne connaissance des caractéristiques d’un nuage de points et ses produits dérivés
• Avoir une vue d’ensemble des solutions pour exploiter les données LiDAR
• Connaître le potentiel des nuages de points (pointclouds) pour votre domaine
2
Après ce cours vous saurez sculpter les nuages
3
Plan du cours
• Le contexte du Lidar : historique, marché, acteurs
• Caractéristique d’un système de mesure LiDAR
• Caractéristiques des données LiDAR : densité, précision, classification, retour, intensité, etc.
• Quelques produits dérivés du LiDAR
• Les logiciels pour gérer et exploiter les données LiDAR et démonstrations
• Exemples d’applications dans le domaine du développement territorial
4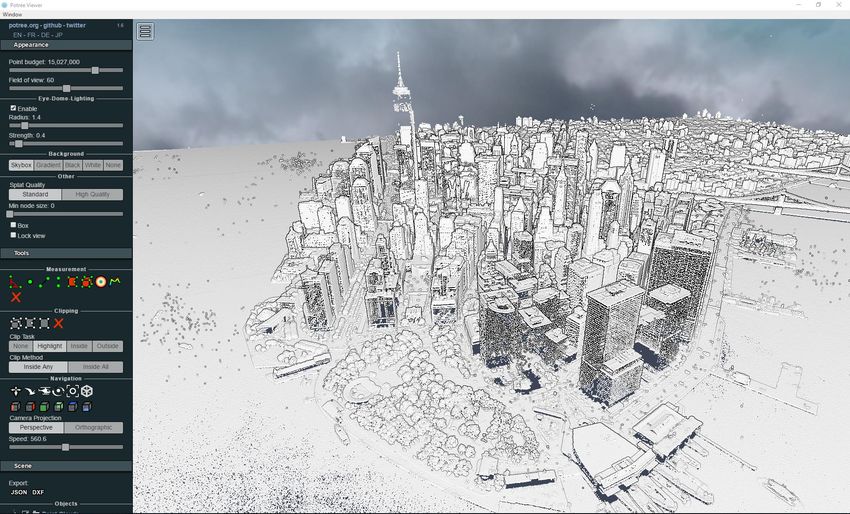
Historique du Lidar aérien
1980: premiers systèmes LiDAR altimétriques (NASA AOL et ATM) et utilisations militaires
1995: premier système LiDAR aéroporté commercial
1996 : 1ères expériences avec des données LiDAR à l’EPFL (hydrologie) et l’ETHZ
2000 : couverture de la Suisse (projet MNT-MO). Swisstopo et cantons. Fin en 2008.
2002 : 1er relevé du canton de Neuchâtel (MNT-MO)
2010 : 2ème relevé du canton de Neuchâtel par SITN - Swissphoto
2014 : Swisstopo propose aux cantons de refaire un vol LiDAR sur toute la Suisse.
2015 : Swisstopo 1er lot (Suisse romande). Projet abandonné suite à un recours.
2016 : 3ème relevé du canton de Neuchâtel par SITN – Flotron & SFS
2016 : Swisstopo 2ème lot (ZH, Suisse orientale) mandat Milan
2018 : Swisstopo 3ème lot (Suisse romande) mandat Milan & Swissphoto
5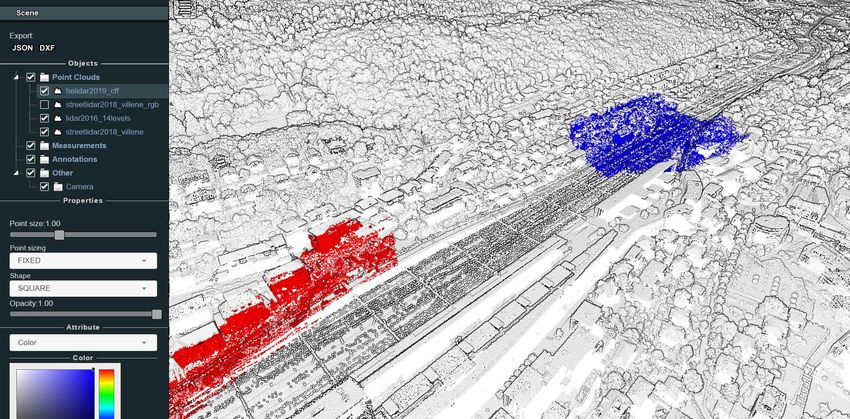
Le marché du LiDAR
• 1.2 milliards $ en 2017, estimation à 2.4 milliards en 2022
• Selon une étude de l’USGS (US Geological Survey)1 modèle altimétrique LiDAR disponible
sur l'entier du territoire américain = économie de l’ordre de 13 milliards de $/an
[Global Market Insights]
[National Enhanced Elevation Assessment]
6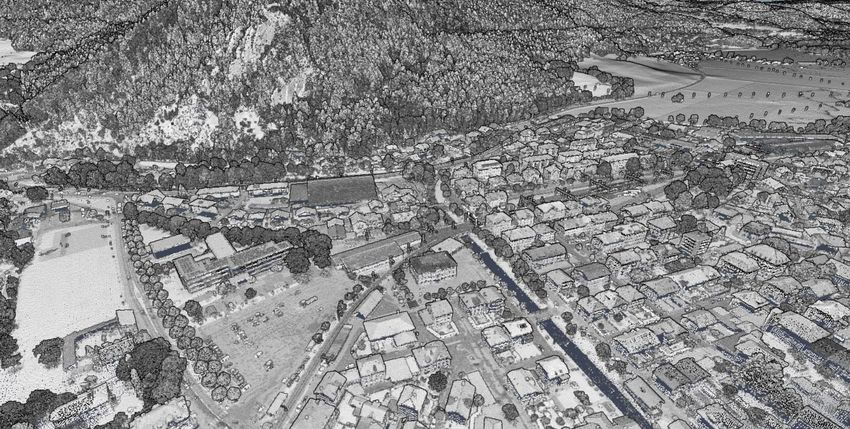
Le marché du LiDAR : relevé de l’ensemble des Etats-Unis
3DEP Lidar USA (piloté par USGS)
• Depuis 2015, plus de 200 agences fédérales,
états, locales et non gouvernementales
collaborent pour l’acquisition de 1.5 million de
km2, soit l’ensemble des USA, dans le cadre du
projet 3DEP.
• Les données sont déjà disponibles pour 50% du
territoire.
• Toutes les données sont gratuites et facilement
téléchargeables.
• L’objectif est de couvrir le territoire en 8 ans
(2016-2023), supeficie 250x la Suisse
• Ce sont plus de 12’000 milliards de points (12
trillion US = 12 billions en français)
• Cela représente plus de 1.8 millions de tuiles
kilométriques en format LAS (LAZ)
• Les données proviennent de plus de 1200
projets à travers les USA
7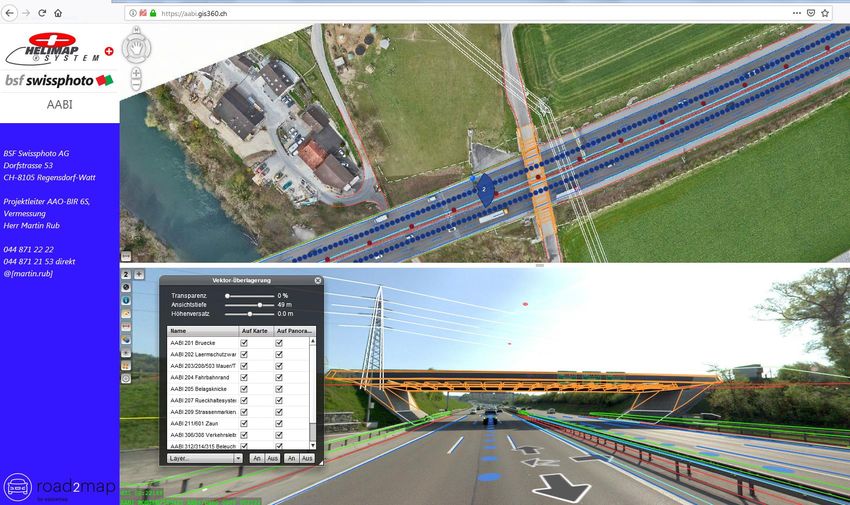
8

Les acteurs du LiDAR aérien
• Constructeurs de système LiDAR : Riegl (Autriche), Optech (USA), Harris (USA), Velodyne (USA),
SigmaSpace (USA)
• Quelques sociétés spécialisées
– En europe : Milan (DE), Grunder (DE), Geophenix (FR), COWI (DK), Aerodata (NL), BLOM
(DE), Avineon (FR), Sintegra (FR)
– En Suisse : Swissphoto (ZH), Flotron (BE), Swiss Flight Service (NE), Helimap (VD)
• Quelques administrations actives dans le domaine du LiDAR
– Swisstopo
– Cantons : GE, NE, VD
• Recherche en Suisse
– EPFL : LASIG (Thèses LiDAR forêts), TOPO (Scan2Map)
– Université de ZH : RSL (Remote sensing Lab) - LidarLab
– WSL (Institut forêt neige et paysage)
9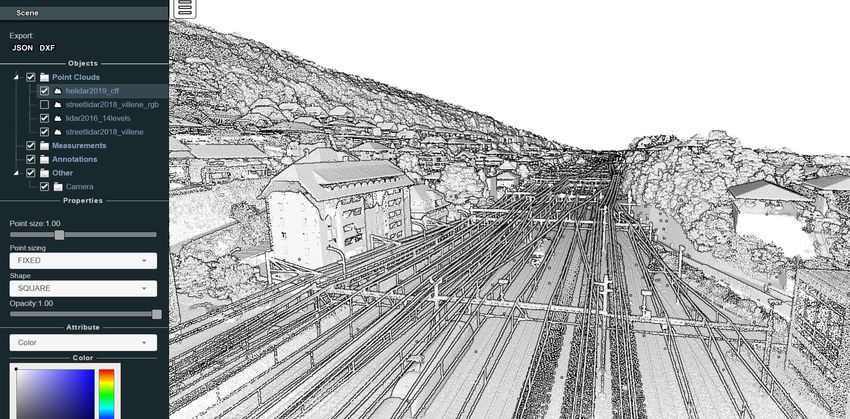
Les différents types de capteurs Lidar
Avion Hélicoptère Drones Mobile Terrestre Miniature
Surfaces étendues Terrains Surfaces Levés linéaires Surfaces réduites Surfaces très
accidentés moyennes (réseau routier, (Levé aérien Levé hélico
Levé mobile
11Relevé altimétrique LiDAR 2010 du canton
12Relevé altimétrique LiDAR 2016 du canton
Planification du vol et vol effectif
14Le LiDAR bathymétrique
Relevé par bâteau sonar
Relevé par lidar bathymétrique (prof. < 10m)
RIEGL VQ-880-G II utilisant le LiDAR vert, longueur d’onde 532 nm (contre 1064 nm pour le LiDAR terrestre)
15Levés ciblés par hélicoptère
Cartographier les effets d’une tempête en milieu
forestier. Plus de 2000 arbres déracinés en 2 minutes.
Cartographie des dangers de chute de blocs sur la falaise
au-dessus de Noiraigue.
Analyse du glissement de Travers
16Relevé LiDAR 2018 mobile et caméra 360° combiné (projet pilote)
18
LiDAR terrestre : levé pour le patrimoine ou la gestion des bâtiments
20LiDAR terrestre : levés de géomètres
Exemples de relevés
Relevé et modélisation des zones
du tracé H18, comprenant :
- les PI de l'Hôtel de Ville et du
Reymond
- la ligne aérienne Vitéos aux Petites
Crozettes
Client
Service des ponts et chaussées (SPCH)
Scanner utilisé
SX-10 de Trimble
Logiciels 3D
3D Reshaper et Rhino3D
21LiDAR terrestre : levés de géomètres (TRN – pont du Seyon)
22Relevé Lidar terrestre : dans le contexte du BIM
Relevé Lidar terrestre : dans le contexte du BIM
Source
VALLORBE GARE
PROJET PILOTE openBIM-RÉNOVATION
Bernard Cherix Architecte
COMPILATION DE NUAGES : 50 Go
Architecture inverseQuel type de scanner Lidar pour les bâtiments ?
“Les solutions GeoSLAM changent la manière de
relever des bâtiments. Nous pouvons maintenant
créer des plans de bâtiments 10x plus rapidement que
lorsque nous utilisions des stations totales ou de
l’équipement classiques de relevé” Morten Thoft,
COWI, Denmark
25Caractéristiques du système LiDAR aérien
Principe d’un LiDAR : Scanner (émetteur-récepteur, système de balayage, horloge de précision) +
GPS & station inertielle (référencement direct) + ordinateur (stockage)
Fréquence de balayage : par ex. Riegl MS Q 1560 : 550 Khz, 550’000 impulsions/seconde (1560i :
plus de 1.3 millions de points au sol par seconde !)
Hauteur de vol : jusqu’à 5000m pour Riegl 1560i
Type de balayage : simple, double, linéaire, rotationnel, etc.
Divergence du faisceau : définit la taille de la tâche au sol du point LiDAR selon la hauteur de vol
FOV (field of view) : angle d’ouverture
Longueur d’onde utilisée : infrarouge, vert, multispectral
Couplage avec caméra: oui ou non, résolution de la caméra
Qualité de la calibration
26Principes de fonctionnement du LiDAR aérien
[Source Airborne and terrestrial laser scanning, Vosselman, Maas]Capacité de pénétration de la végétation du LiDAR
Faisceau lidar
Retour unique
1er écho
1 à 2 retours
2éme écho
1 à 3 retours
3éme écho
Dernier écho
1 à 7 retours
[Source Gilles Gachet]Comparaison nuage de points LiDAR et photogrammétrique (autocorrélation)
Caractéristiques du relevé LiDAR 2016 du canton de Neuchâtel • Divergence du faisceau : µ
Caractéristiques d’un relevé LiDAR aérien
Période de vol : avec ou sans feuilles
Hauteur de vol : entre 700 et 2500m (vol 2016 700m sur sol, vol 2019 1200m sur sol)
Planification du vol : recouvrement latéral (10% en 2016)
Tâche au sol : 15 cm
Densité : 1 pts/m2 à 100 pts/m2
Précision : < 10 cm en altimétrie (vol 2016, erreur moyenne 4 à 6 cm sur les points de calage)
Classification : nombre de classes pour les points (15 classes)
Qualité de la classification : % par classe, algorithme vs manuel
Qualité du filtrage des données : bruit, points bas, points hauts, objets mobile, etc.
31Choix de la période de vol pour un relevé LiDAR aérien
Le choix de la période d’acquisition dépend:
• des produits désirés
• du type de forêt (feuillus – conifères)
• des contraintes topographiques et météo
Sans feuilles
- bon MNT
- structure du branchage
- classification feuillus/conifères aisées
Avec feuilles
- moins bon MNT
- bon modèle de la canopée
- perte d’information en sous-bois
[Source Matthew Parkan, Thèse EPFL 2019]
32Caractéristiques des données LiDAR
Composants ou attributs des points LiDAR
LiDAR point
Coordonnées planimétriques : XY
X 2543645.234
Altitude : Z
Y 1543234.234
Classification : 1 à 100 (sol, végétation, voitures, lignes HT, eau, grues, etc.)
Intensité : intensité de retour du signal (réflectance de la surface) Altitude +954.345
Radiométrie : si image disponible, valeurs RGB Class 2
Retour : 1 à 15 Intensity 21607.0
Angle : angle d’incidence du rayon Return 1
Date : date du vol GPS Time 146234543.3
Temps GPS : date précise du relevé du point
Line 18
Ligne : Ligne de vol
Scan angle -18.234
33Format standard pour les données LiDAR : LAS (ou LAZ)
• C’est le format le plus courant LAS Standard 1.4 Valeur
Created, never classified 0
• Il est supporté par tous les logiciels LiDAR Unclassified 1
• C’est un standard international (ASPRS) Ground 2
Low Vegetation 3
• Version actuelle LAS 1.4 Medium Vegetation 4
High Vegetation 5
• On peut le comprimer en LAZ 1.4 (sans perte)
Building 6
• Il définit les attributs : XYZ, classification, GPSTime Low Point (noise) 7
Reserved 8
• Il définit les métadonnées : projection Water 9
• Il définit les principales classes -> Rail 10
Road Surface 11
Reserved 12
Wire – Guard 13
Wire – Conductor 14
Transmission Tower 15
Wire-structure Connector 16
Bridge Deck 17
18 High Noise 18
Reserved 19-63
User definable 64-255
34Relevé 3D Lidar aérien : volume de données x 1 million en 20 ans
Année Points / m2 Nb de points Quantité de données CHF / million de points
1998 0.0016 1million 20 MB
LiDAR
2001 1 700 millions 0.2 TB 360.-
2010 7 5 milliards 2 TB 40.-
2016 30 30 milliards 20 TB 5.-Un des enjeux des données LiDAR : la maîtrise des gros volumes et les algorithmes
• Logiciels performants de visualisation et
d’analyse
• Algorithmes de simplification : par ex.
keypoints (points importants)
• Algorithmes pour l’extraction d’objets en 3D :
bâtiments, arbres, lignes aériennes, pylônes,
signalisation
• Calculs de produits dérivés : ombrage, modèle
numérique de terrain, modèle numérique de
surface, etc.
38Les produits d’un relevé LiDAR
Nuage de points bruts Nuage de points lidar classifiés Nuage de points lidar colorisés
Modèle numérique de surface (MNS) Modèle numérique de terrain (MNT) Orthophoto brute 10cm
3940
41
42
43
Démonstrations
44Nuage de points géoréférencé
Nuage de points
géoréférencé
Points solNuage de points
géoréférencé
Points sol
Points bâtimentsNuage de points
géoréférencé
Points sol
Points bâtiments
Points végétationNuage de points
géoréférencé
Points sol
Points bâtiments
Points végétation
Ponts, lignes, …Nuage de points
ombré (shadevis)
Points sol
Points bâtiments
Points végétation
Ponts, lignes, …Nuage de points
géoréférencé
Points sol
Points bâtiments MNS
Points végétation
Ponts, lignes, …Nuage de points
géoréférencé
Points solNuage de points
géoréférencé Keypoints
Points solNuage de points
géoréférencé Keypoints TIN
Points sol MNTNuage de points
géoréférencé Keypoints TIN Courbes de niveaux
Points sol MNTNuage de points
géoréférencé Keypoints TIN Courbes de niveaux
Points sol MNT OmbrageNuage de points
géoréférencé
Extraction bâtiments
Points bâtimentsNuage de points
géoréférencé Keypoints TIN
Points sol Extraction bâtiments
Points bâtiments Modèle 3D
Points végétation
Ponts, lignes, …Les produits d’un relevé Lidar : MNT, MNS, MNC
Modèle numérique de surface Modèle numérique de terrain Modèle numérique de hauteur
59Evolution des données 1998-2001-2016 : modèle numérique de terrain
Comparaison 2001-2010-2016
61Comparaison 2001-2010-2016
Démonstrations
65Mise en évidence des façades des bâtiments
Balcons
Tuiles faîtières
Gouttière
Profil sur un toitCartographie des différences entre les relevés 2016 et 2010
6768
Impact des caractéristiques de vol sur le MNT et l’extraction d’informations
Les logiciels du SITN pour gérer et exploiter les données LiDAR
Terrascan http://www.terrasolid.com
La référence pour la gestion des données brutes, filtrage, traitement, classification, calculs de produits
dérivés, etc.
FME (Safe) http://www.safe.com
La référence pour la transformation de données SIG : assemblage, découpage, transformation,
publication. Intégration du type de données Pointcloud et traitement associés
Rhino Terrain (City – Capture) http://www.rhinoterrain.com
Pour créer des maquettes 3D
Cloudcompare http://www.cloudcompare.org
Permet d’analyser et comparer des nuages de points (analyse de différences)
70Diffusion des données LiDAR avec FME
Périmètre projet
3080 tuiles LiDAR 1km x 1km
30 milliards de points
71Les logiciels du SITN pour gérer et exploiter les données LiDAR
Potree http://www.potree.org
Permet de visualiser des milliards de points de manière optimale
PotreeConverter pour optimiser le stockage (indexation 3D)
PotreeDesktop et PotreeViewer (internet) pour visualiser et analyser les points
FugroViewer https://www.fugro.com
Permet de visualiser un nuage de points, calculer des profils
Géoportail du SITN http://sitn.ne.ch
Permet de consulter les produits dérivés et offre des fonctions comme les profils
Géoportail LiDAR http://sitn.ne.ch/lidar basé sur Potree http://www.potree.org
Permet de travailler directement avec le nuage de points
Les logiciels de CAO
Autocad, Archicad, Microstation, Rhino, etc. intègrent désormais les nuages de points
Si votre logiciel 3D ne gère pas les nuages de points -> changez de logiciel :O)
72Autres logiciels pour exploiter les données LiDAR
Topodot https://www.certainty3d.com/
Logiciel spécialisé pour l’extraction d’information des données LiDAR : routes, lignes aériennes, rail, signalisation,
ponts, etc.
Orbit https://orbitgt.com/
Logiciel permettant l’exploitation combinée de données LiDAR et images obliques
3D Reshaper https://www.3dreshaper.com/
3DReshaper est un logiciel simple d'utilisation et polyvalent dédié au traitement de n'importe quel nuage de point
pour de nombreuses applications. Du nuage de point aux livrables, de l'ingénierie au patrimoine, de la
topographie à l'industrie
73Représentation par nuage de points uniquement
74Les données LiDAR sont largement exploitées à Neuchâtel
Mensuration officielle Routes et dangers naturels
Détection des chemins en forêt pour la mensuration officielle Avant-projets routiers – A5, H20
Calcul des hauteurs de bâtiments – cadastre du bruit Cartographie des inondations, laves torrentielles et érosion
Couche altimétrique de la mensuration Cartographie des affaissements, dolines, glissements de terrain et
Relevé automatique de la limite de la nature « forêt » (RALF) chutes de blocs
Production d’orthophotos (par ex. orthophoto 2006, 2016) Cadastre du bruit
Détermination des courbes de niveau
Végétation et ombrage du plan d’ensemble Environment et energie
Calcul des pentes des routes pour modélisation de la pollution
Agriculture Impact des antennes de téléphonie mobile
Calculs automatique des taux de boisements (pâturages boisés) Analyses d’impact visuel des éoliennes
Calculs de pentes et rayonnement pour la viticulture Extraction 3D des lignes électriques
Calculs des pentes pour subventions agricoles Potentiel bois-énergie
Analyse d’ombre portée de bâtiments sur la zone viticole Détermination de tracés du réseau hydrographique cantonal
Suivi de l’extraction des matériaux (gravières)
Forêts et nature
Plans de martelage en foresterie Infrastructures et aménagement
Inventaire forestier Données de base pour l’aménagement urbain
Cartographie des peuplements Planification et conception des réseaux routier et ferré
Localisation de grands arbres Maquettes 3d de communication
Visualisation et détermination des structures forestières verticales Réseaux d’assainissement, d’approvisionnement en
Cartographie des dolines et murs de pierres sèches énergie
Analyse du potentiel bois-énergie
Cartographie des dégâts en forêt suite aux intempéries
75Algorithmes complexes pour exploiter ces données : extraction des arbres
Relevé 2016
Relevé 2010
Relevé 2001
76Perspectives : reconstruction automatique des arbres
Efficient Tree Modeling from Airborne LiDAR Point Clouds (Shaojun Hu et autres)
77 77Cas d’utilisation du Lidar en urbanisme : canton
Maquettes de communication de grands projets
• Projets ferroviaires – projet RER 2030
• Projets routiers – H10, H18
• Pôles de développement économique
• Evolution urbaine
• Renaturation de cours d’eaux
Ex. maquette 3D de communication du projet de pôle de développement économique (décembre 2018)
• Utilisation dans le groupe technique de projet
• Utilisation pour la communication à la population
78Le SITN se projette en 3D
VirtualCity Neuchâtel : combinaison bâti3D et LiDAR
• MNT (LiDAR) • Autres éléments
• Bâtiments --> Cadastre 3D des bâtiments
• Végétation (LiDAR) Ouvrages d’art
(ponts, tunnels)
Petits ouvrages
(murs, escaliers, trottoirs
…)
Réseaux humains
(routes, voies ferrées,
lignes électriques,
conduites)
Mobilier urbain
(lampadaires, arrêts de
bus, bancs, statues …)
MNT
Bâtiments
80VirtualCity.LiDAR Neuchâtel : uniquement LiDAR 100%
81Cas d’utilisation du Lidar en urbanisme : communes
Ville de Neuchâtel
Service d’urbanisme de la ville de Neuchâtel : maquette 3D pour un projet de densification (novembre 2018)
• Maquette 3D pour le projet « Edouard-Dubois, Charmettes, Deurres »
• Le secteur en question comprend plusieurs terrains construits ou libres de construction qui sont destinés à être repensés dans
une optique de densification
• Organisation d’un workshop pluridisciplinaire réunissant architectes, architecte-paysagiste, ingénieur circulation et urbaniste.
• Le workshop a pour objectif de fournir la matière première à l’élaboration d’une vision directrice pour les quartiers concernés
Service de travaux publics : relevé 3D Lidar héliporté avec Helimap (janvier 2019)
• Réaménagement de l’axe et gabarits du quai max-petitpierre RC5 (enrobé en bout de course) : passage routes, tram, promenade
avec différents niveaux
• Disposer de profils extrêmement précis pour imaginer les variantes
• Vol combiné avec un relevé pour la Place Pury et le réaménagement de la route Prébard-Ecluse + relevé de la gare pour les CFF
82Le SITN se projette en 3D
Cas d’utilisation du Lidar en urbanisme : secteur privé
• carte de visibilité (parc éolien, test de tour ou autres objets
visibles de loin)
• profils altimétriques pour études test paysagère,
implantation de quartier, relevé ponctuels de hauteur de
végétation ou constructions, voire de mur ou objet plus
petit, pour les projets d'espaces publics.
• maquette 3D sur un contexte existant d'un nouveau
quartier ou projet divers d'urbanisme (modelé de terrain,
constructions) ou de "communication" pour illustrer
/animer un projet en cours (ex: delta du Rhône)
• photomontage : intégration d'un projet dans le modèle
issu du LIDAR pour "caler" un photomontage réaliste 3Dok
- Ex: nouveau quartier, mur de soutènement de CFF, tour
d'habitation, silo, usine de biogaz
85Conclusions et discussion
• Les données LiDAR sont désormais largement disponibles en Suisse et particulièrement à Neuchâtel
• Elles sont la base pour la modélisation de la topographie depuis 20 ans
• Le potentiel de ces données est énorme
• Les volumes conséquents de données effraient encore parfois les utilisateurs potentiels
• L’utilisation de données LiDAR pour la réalisation de maquettes 3D pour le développement territorial
se généralise
• Le SITN est à votre disposition pour tout besoin concernant le LiDAR
• Pour aller plus loin : livre Airborne and Terrestrial Laser Scanning
86Contenu clé USB
FugroLasViewer Presentation
Logiciel simple et gratuit pour visualiser des fichiers LAS Présentation powernpoint Lidar SITN utilisée pour la formation
Permet de visualiser selon les différents attributs (RGB, intensité
Lidar Video
Echantillons de données Lidar pour tester la visualisation avec Courte vidéo (10 min) de présentation de la technologie LiDAR
les logiciels fournis sur la clé
PotreeConverter PotreeDesktop
Logiciel gratuit (open source) pour convertir les données Logiciel gratuit très efficace pour visualiser les données Lidar
Lidar LAS ou LAZ dans un format très efficace pour la Nécessite de convertir les données LAS en format Potree avec
visualisation PotreeConverter
La transformation se fait par une simple ligne de commande cf. La conversion permet un découpage en tuiles et indexation 3D pour un
exemple fourni : accès rapide
PotreeConverter.exe ..\lidar\las\2559500_1203500.las -o Pas besoin d’installer le logiciel sur le PC. Il suffit de lancer le fichier
clouds\nelidar2016_serrieres2 -a RGB CLASSIFICATION PotreeDesktop.bat directement depuis la clé
INTENSITY RETURN_NUMBER On peut aussi copier le contenu du dossier sur son PC pour l’installation.
Il suffit de copier un fichier cloud.js créé depuis PotreeConverter dans la
fenêtre du logiciel pour le visualiser
Markus Schutz, Technical University Vienne (AT), développeur de potree
87Réparation des coûts d’un projet LiDAR Projet Suisse Romande : 5500 km2 Coûts : 750 KF, soit ~ 140.-/km2 Coût relevé LiDAR - vol : 300 KF Classification : 300 KF Orthophoto scratch : 30 KF Produits dérivés MNT, MNS : 50 KF Autres : 70 KF
Cas d’utilisation du Lidar en urbanisme : secteur privé
89Démonstrations
• http://sitn.ne.ch/lidar/
• http://www.helimap.ch/sample_data/AABI.html
• http://www.helimap.ch/sample_data/ALLC/ALLC.html
90Précision des données LiDAR et Jargon lidar Quelle est la précision des données Lidar fournies ? «Les données ici ont été calées sur des GCP. Si les données du 1560 colle à 2-3cm, c'est la norme. A 700m sur sol avec un AP60, la trajectoire est précise à 3-4cm en Z - estimateur d'Applanix et ensuite les angles ont des erreurs de max 0.01° sur le heading, soit propagés à 700m en bord de swath à environ 5-6cm d'erreur planimétrique. En roll/pitch, on est plutôt vers 2cm d'erreur alti/plani»
Principales sources d’erreur des données Lidar
1. Les erreurs de la détermination directe des paramètres d’orientation (géoréférencement direct) –
trajectoire GPS – 3 à 15 cm
2. Les erreurs propres au capteur laser lors des mesures de distance (nature du sol & atmosphère – 20
à 30 mm)
3. Les erreurs relatives aux changements de géométrie lors du processus de balayage des impulsions
4. L’amplitude du signal retour (dépend de la hauteur de vol, de l’angle d’incidence des impulsions et
de la réflectivité de la cible)
5. L’imbrication des échos retours en raison de la structure verticale de la cible
6. Présence de cibles multiples à l’intérieur de l’emprunte au sol
7. Les conditions atmosphériques
8. La divergence du rayon – distance mesurée est le résultat de l’intégration de différents retours sur
l’emprunte au sol
92Vous pouvez aussi lire

















































