DS 1 : Machine de rééducation
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
MP 2021-2022 DS1 1 DS 1 : Machine de rééducation Durée : 2 heures L’usage des calculatrices est autorisé. Un soin particulier sera apporté à la présentation et la rédaction de la copie (des points pourront être enlevés si nécessaire). Le numéro de la question traitée sera clairement indiqué, les résultats seront encadrés. Les différentes parties étant totalement indépendantes. Figure 1 – Sys-Reeduc en utilisation. 1 Présentation du système Le Sys-Reeduc est destiné à aider à la rééducation des membres inférieurs chez les patients ayant été victime d’un accident. Ce système permet deux types de rééducation : - une rééducation passive qui vise à récupérer la mobilité des jambes en termes d’amplitude du mouvement. La machine impose un déplacement aux jambes du patient qui ne résiste pas. - une rééducation active, ce qui signifie que l’on cherche à renforcer les muscles et la coordination musculaire. Le patient ne se laisse pas conduire par le système mais résiste au mouvement imposé par la machine. Les exercices en chaîne fermée (rééducation active) permettent au patient de récupérer beaucoup plus rapidement. Le système Sys-Reeduc a l’avantage de proposer des exercices combinant la flexion de la jambe à la rotation du pied de manière à solliciter parfaitement les muscles souhaités. Dans le cadre du fonctionnement du système, le kinésithérapeute peut aider à la rééducation des membres inférieurs du patient en agissant sur : - la flexion – extension du genou ; - la « vrille » de la cheville (rotation interne-externe). 1 Librement adapté du sujet CCP PSI 2013 page 1/11

MP 2021-2022 DS1 Le système doit aussi permettre la flexion – extension de la cheville et s’adapter à la morphologie des patients. Enfin, pour des raisons de sécurité, le système ne doit pas blesser le patient. Le système doit répondre (entre autres) aux exigences suivantes : Exigences Critères Niveaux Permettre au kinésithérapeute Angle de rotation de la cuisse De 0° à 150° de rééduquer les membres Effort du patient Jusqu’à 20 N inférieurs du patient Pilotage asservi du mouvement • écart de position Nul • rapidité T5% < 0,2 s S’adapter à la morphologie des Longueur de la jambe De 0,6 à 1,2 m patients Ecartement du bassin 370 à 600 mm Distance plat du pied - cheville Ne pas blesser le patient Sécurité Bloquer le fonctionnement en fonction de la taille du patient 2 Architecture du système – Analyse interne Afin de réaliser le mouvement souhaité, le choix effectué du mécanisme de la machine SYS-REEDUC suppose que la hanche est fixe par rapport au bâti et que le mouvement est engendré par un support mobile sur lequel repose le pied. ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 2 4 = 2 + 3 4 Figure 2 - Schéma du Sys-Réduc La chaîne cinématique, présentée sur la figure 2, se compose du bâti 0 (le haut du corps du patient est supposé lié au dossier du bâti), du support mobile 1, du support intermédiaire 2, du support de pied 3, de la cuisse, de la jambe et du pied. Un seul côté est représenté mais la machine réelle permet de travailler sur les deux jambes en même temps si cela est nécessaire. page 2/11

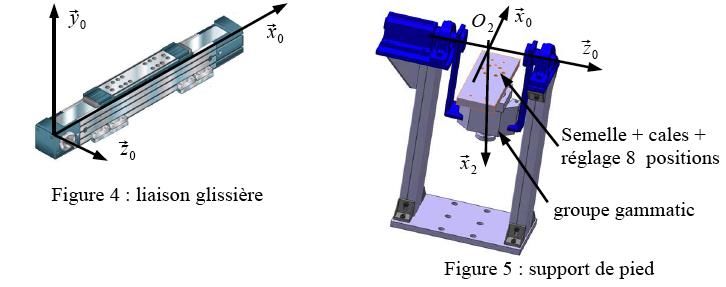
MP 2021-2022 DS1 Le graphe des liaisons correspondant à ce système est proposé figure 3. Sphérique (ou rotule) Glissière Bâti et dos de centre 0 0 du patient 0 Support mobile Cuisse 1 Pivot Pivot ( 1 , 0 ) ( 2 , 0 ) Support Jambe intermédiaire 2 Pivot Support de Sphérique (ou rotule) ( 3 , 3 ) pied et pied de centre 2 3 Figure 3 – Graphe des liaisons du Sys-Réduc avec son utilisateur • Le mouvement de rotation interne-externe du pied est caractérisé par l’angle 23 = ( 2 , 3 ) = ( 2 , 3 ). • le support intermédiaire 2 est en liaison pivot d'axe (O2 , z0 ) avec le support mobile 1. Notons qu'un système de cale de réglage permet d'aligner la cheville avec l'axe de cette liaison pivot. Cette liaison permet de réaliser le mouvement de dorsi-flexion du pied par rapport à la jambe caractérisé par l’angle 02 = ( 0 , 2 ) = ( 0 , 2 ). • le support mobile 1 est en liaison glissière avec le bâti 0 suivant la direction x0 . Le paramètre de cette liaison glissière est notée x (t ) . Elle permet le déplacement longitudinal des membres inférieurs. page 3/11
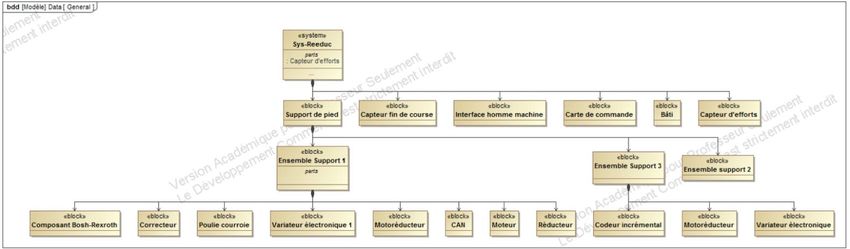
MP 2021-2022 DS1 La liaison glissière de la figure 4 est réalisée par un composant standard. Sa course utile est de 1,3 m. On lui associe un moteur et un réducteur permettant de supporter un effort de 1 500 N suivant la direction de translation pour une vitesse maximale de 2 m/s. Ces valeurs permettent de travailler avec un profil de rééducation à faible charge ou avec un profil de rééducation sportif. Un dispositif poulie-courroie permet de transformer la rotation en sortie du réducteur en translation du plateau supérieur. Les deux modules linéaires sont montés sur des rails permettant d’ajuster leur écartement afin d’adapter le système à la morphologie de chaque utilisateur, sa variation est comprise entre 370 mm et 600 mm. La figure 5 présente le support mobile réalisé pour chacun des pieds. Il permet la motorisation du mouvement de rotation interne-externe du pied (autour de l'axe (O2 , x2 ) ). Ainsi, le pied repose sur une semelle mise en rotation par un moteur-réducteur. Celui-ci permet d’engendrer un couple maximal de 20 N.m pour une vitesse maximale de 10 tour.s-1. Cette semelle est ajustable en profondeur (par un ensemble de cales) afin de pouvoir aligner l’axe de dorsi-flexion/flexion plantaire de la cheville avec l’axe de rotation permettant le réglage de l’inclinaison du pied (axe (O2 , z0 ) ). Cette semelle permet également le réglage de l’inclinaison du pied grâce à une tige de fixation à huit positions comprises entre – 20 °et 50 °, conformément aux limites angulaires de la dorsi-flexion/flexion plantaire de la cheville. Enfin, une fixation, qui n’est pas présentée ici, permet de maintenir le pied en contact avec le support mobile. La rotation de chaque moteur est mesurée à l'aide de codeurs incrémentaux permettant ainsi la mesure du déplacement x (t ) et de la rotation 23 (t ) . De plus, des capteurs de fin de course situés sur les axes permettent d'arrêter l'exercice en cas de problèmes liés à la commande (la position de ces capteurs est réglable pour s'adapter au patient). Deux capteurs d'efforts tridimensionnels permettent de mesurer les forces et couples appliqués par le patient sur la machine. Ils permettent : - d'évaluer l'efficacité, la performance et l'amélioration des aptitudes motrices ; - de mesurer l'effort que le patient oppose au mouvement afin d'imposer un couple adapté sur les axes moteur. Enfin, les moteurs sont alimentés par des variateurs électroniques pilotés par une carte de commande qui génère les lois de commande en fonction du retour des capteurs. Figure 5 bis : diagramme BBD du SYS REEDUC Le kinésithérapeute peut régler le système grâce à une interface homme/machine. page 4/11
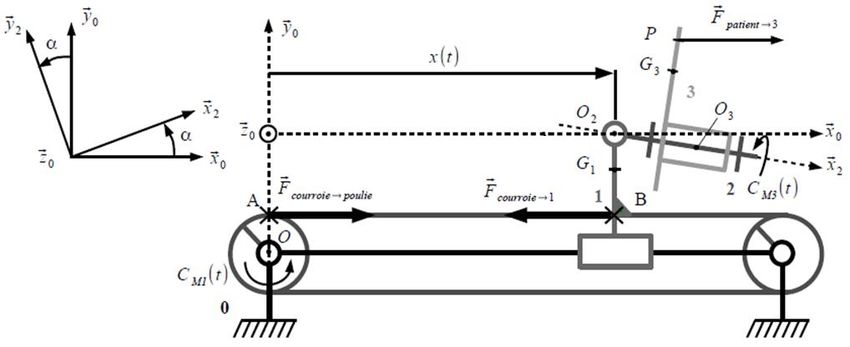
MP 2021-2022 DS1 Question 1 - Compléter le schéma fonctionnel faisant apparaitre la chaine d’information et la chaine d’énergie du système. 3 Modélisation et performances du système de rééducation 3.1 Approche géométrique et cinématique On reprend le paramétrage donné sur la figure 2. Pour les questions Q2 et Q3 uniquement, on ne prendra pas en compte le mouvement de rotation interne-externe du pied : 23 (t ) = 0 rad . On fera alors l'hypothèse d'un mouvement plan dans le plan (O0 , x 0 , y 0 ) . Question 2 - Déterminer la loi entrée-sortie x (t ) en fonction de 0c et L . On rappelle que l'angle de flexion de la hanche vaut 0c + étant donné le paramétrage. On prendra = 60° pour les applications numériques. Question 3 - Effectuer l'application numérique permettant de connaître x la variation de longueur de x (t ) entre la position d'angle minimum de flexion de la hanche où on aura 0c,min = 0° et la position d'angle maximum de flexion de la hanche où on aura 0c,max . Conclure quant au choix du composant réalisant la liaison glissière vis-à-vis de sa course utile. On souhaite connaitre la vitesse et l’accélération du point 4 situé à l’extrémité de la pièce 3. Question 4 - Exprimer, en tenant compte uniquement du sys-réduc et pas de son utilisateur, la vitesse ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ ̇ ̇ 4 ,3/0 en fonction de ( ), 02 et 23 (on pose 02 = ( 0 , 2 ) = ( 0 , 2 ) et 23 = ( 2 , 3 ) = ( 2 , 3 )). Question 5 - Exprimer, en tenant compte uniquement du sys-réduc et pas de son utilisateur, l’accélération ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ Γ 4 ,3/0 . 3.2 Comportement statique du système Figure 6 – Modèle de la chaîne de transmission page 5/11
MP 2021-2022 DS1 Nous adoptons la modélisation de la figure 6 avec : • Le moteur 1, entraînant la translation du support mobile 1, délivre un couple moteur tel que : 1 ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 1→1 = 1 . ⃗⃗⃗ 0 . Le moteur 1 entraîne un réducteur 1 de rapport 1 = 10. La sortie du réducteur est liée à la poulie de rayon = 46,1 . On note ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ →1 = − 1 . ⃗⃗⃗⃗ 0 . • La courroie est supposée indéformable. • Le moteur 2, entraînant la rotation du support de pied 3 par rapport au support intermédiaire 2, délivre un couple moteur tel que : ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 2→3 = 3 . ⃗⃗⃗⃗ 2 . • Le patient exerce une action mécanique considérée connue sur le support de pied 3 modélisée par un glisseur passant par le point P tel que : ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ →3 = . ⃗⃗⃗⃗ 0 . • Les masses sont négligées. • Les liaisons sont considérées parfaites. • ⃗⃗⃗⃗⃗⃗⃗⃗ 2 = ( ) ⃗⃗⃗⃗0 + ℎ2 ⃗⃗⃗⃗ 0 • 2 = ℎ4 ⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ 2 + ( ) ⃗⃗⃗⃗3 Question 6 - Proposez un graphe des liaisons du mécanisme. Question 7 - Proposer une démarche permettant de calculer le couple moteur 1 : 1 en fonction de l’action du patient sur le support de pied 3 : et des données de l’énoncé. Aucun calcul n’est demandé. Question 8 - Mettre en œuvre la démarche proposée à la question précédente et donner l’expression de 1 en fonction de et des données de l’énoncé. 3.3 Pilotage du SYS-REEDUC L'objectif de cette partie est de modéliser l'asservissement du système, puis de paramétrer le correcteur pour répondre aux exigences présentées page 2. Lors des séances de rééducation passive, le patient n’exerce aucun effort résistant sur le support de pied. Ses jambes se déplacent en suivant le mouvement imposé par le chariot. Le système est composé d'un générateur de consigne qui, à partir de la mesure de l'action du patient et de la mesure des paramètres du système, va générer la consigne adéquate pour piloter le système. Nous n'étudierons pas la partie générateur de consigne mais uniquement le système asservi piloté par celui-ci. L'asservissement en déplacement longitudinal a pour consigne de déplacement (en mètres). Ce déplacement est transformé en un nombre d'incréments de consigne à l'aide d'un convertisseur analogique/numérique. Ce nombre d'incréments de consigne est comparé à l'image du déplacement angulaire du moteur , obtenu avec le codeur incrémental, pour former un écart noté . Cet écart est ensuite adapté à l'aide d'un correcteur (carte électronique) pour former la tension moteur (en volts). Le moteur tourne ensuite à une vitesse (en radians par seconde), la position angulaire est notée (en radians). Cette position angulaire est réduite à l'aide d'un réducteur et on note l'angle de l'axe de sortie du réducteur, qui est lié à un dispositif poulie-courroie entraînant le support, dont on note le déplacement . Ce dispositif est contenu dans le composant Bosh-Rexroth. Question 9 - Compléter le schéma bloc fonctionnel du document réponse en indiquant dans chaque bloc le nom du composant correspondant. page 6/11
MP 2021-2022 DS1 Le réducteur est représenté sur les figures 7 et 8. 7 8 On note : • 0 = 90 le nombre de dents de la couronne 0, liée au bâti ; • 1/0 la vitesse de rotation du pignon 1 par rapport à 0 ; • Z1 = 10 le nombre de dents du pignon 1 ; • 2 /0 la vitesse de rotation du pignon 2 par rapport à 0 ; • Z 2 = 15 le nombre de dents du pignon 2 ; • 3/0 la vitesse de rotation du solide 3 par rapport au bâti 0. Question 10 - Déterminer la relation entre les vitesses de rotation 1/0 et 3/0 en fonction de Z 0 et Z1 . Question 11 - Les solides 1 et 3 du réducteur sont liés soit à l'axe moteur, soit à l'axe de la poulie. Définir en le justifiant quel solide est relié à quel axe. page 7/11
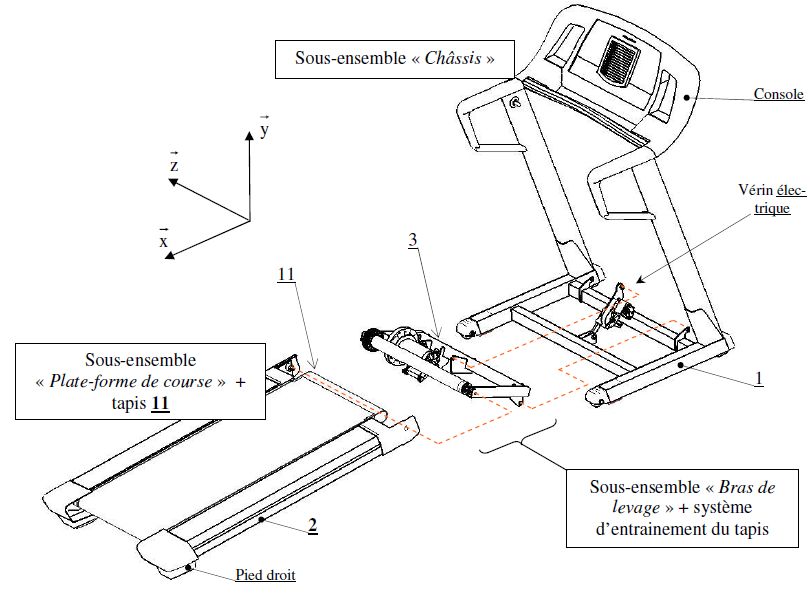
MP 2021-2022 DS1 4 Etude d’un tapis de course Après plusieurs séances de rééducation, le kinésithérapeute complète les séances sur le système Sys-Reeduc par l’utilisation d’un tapis de course. Figure 11 – Tapis de course étudié Ce système permet au patient de s’entraîner sur un tapis pouvant défiler à différentes vitesses et prendre une inclinaison variable. Le kinésithérapeute a la possibilité, par l’intermédiaire de la console, d’imposer une vitesse de défilement du tapis. Celle-ci peut varier de la valeur minimale de 1,6 Km/h à la valeur maximale de 16 Km/h. L’inclinaison de la plate-forme de course est motorisée et réglable. En position basse, la plate-forme n’est pas horizontale mais possède une inclinaison de 1°. En position haute, l’inclinaison est maximale est vaut 12°. Figure 12 – Positions extrême du tapis de course page 8/11
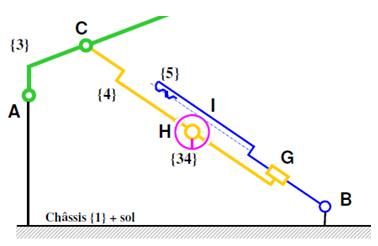
MP 2021-2022 DS1 Figure 13 – Les trois sous-ensembles principaux Le tapis de course étudié est principalement composé de trois grands sous-ensembles : • le sous-ensemble « Châssis » repéré 1. Il comprend la base sur laquelle est fixée, entre autres, la console par l’intermédiaire de deux montants (gauche et droit). Ce sous-ensemble est immobile durant l’utilisation du tapis. • le sous-ensemble « plate-forme de course » constitué entre autre d’un plateau 13 solidaire d’un cadre mécano-soudé 2. Ce sous-ensemble est articulé par rapport au bras de levage 3 à une extrémité, et en appui sur le sol par l’intermédiaire de deux pieds à l’autre extrémité. • le sous-ensemble « bras de levage » repéré 3. Ce sous-ensemble pivote par rapport au châssis 1 lorsque l’utilisateur désire incliner le tapis. Le bras de levage 3 est mis en mouvement par le vérin de tige 4 et de corps 5. Le schéma cinématique du mécanisme d’inclinaison est donné ci-dessous : page 9/11
MP 2021-2022
DS1
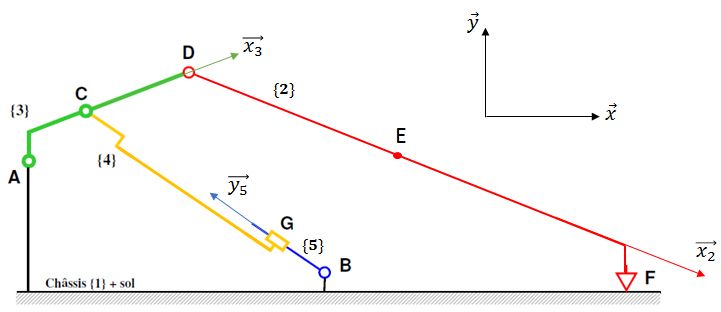
Figure 14 – Schéma cinématique du mécanisme d’inclinaison
Données et hypothèses :
• L’action mécanique du poids de l’ensemble {patient + plate-forme} est modélisée par un glisseur
appliqué en E. La masse de l’ensemble {patient + plate-forme} est notée = 200 .
• Le poids des autres pièces est négligé.
• Les liaisons mécaniques sont considérées parfaites.
• Le problème est considéré plan dans le plan ( , ).
• = ( , 3 ) = ( , 3 ) = 45°
• = ( , 5 ) = ( , 5 ) = 45°
• = ( , 2 ) = ( , 2 ) = −12°
• ⃗⃗⃗⃗⃗
= − ⃗⃗⃗⃗2
• ⃗⃗⃗⃗⃗ = −
⃗⃗⃗⃗2
• ⃗⃗⃗⃗⃗ = +
⃗⃗⃗⃗3
• ⃗⃗⃗⃗⃗
= + ⃗⃗⃗⃗3
• ⃗⃗⃗⃗⃗ = ( )
⃗⃗⃗⃗5
Question 12 - Proposer un graphe des liaisons du mécanisme complété avec les données de l’énoncé.
Question 13 - A partir du bilan des actions mécaniques extérieures exercées sur le vérin {4+5}, donner la
forme des torseurs d'action mécanique transmissible par :
• la liaison pivot de centre B entre les pièces 0 et 5 ;
• la liaison pivot de centre C entre les pièce 3 et 4.
Quelle relation peut-on écrire entre ces torseurs ? Aucune équation n'est nécessaire pour répondre à cette
question.
Question 14 - En isolant le cadre 2, déterminer les composantes de la résultante de l'action mécanique
transmise par la liaison pivot entre le cadre 2 et le bras de levage 3 en fonction du poids de l’ensemble
{patient + plate-forme}.
Question 15 - En isolant le bras de levage 3, déterminer les composantes de la résultante de l'action
mécanique transmise par la liaison pivot entre le bras de levage 3 et la tige du vérin 4 en fonction du
poids de l’ensemble {patient + plate-forme}.
page 10/11MP 2021-2022
DS1
Le vérin {4+5} est un vérin électrique dont le schéma cinématique est donné ci-dessous :
Un moteur électrique, suivi d’un réducteur, actionne un pignon 34 qui engrène avec la crémaillère 5 permettant
la mise en mouvement de la tige 4.
Données et hypothèses :
• Le paramétrage du système est que sur la figure 14
• Le rayon du pignon est : = 10
• Le rapport de réduction est : = 1/25
• La résultante de 3 sur 4 est : ⃗⃗⃗⃗⃗⃗⃗⃗⃗
3→4 = 34 ⃗⃗⃗⃗
5 avec 34 = 5000
Question 16 - Calculer la valeur du couple à la sortie du réducteur en fonction de 34 et des données
de l’énoncé.
Question 17 - En déduire la valeur du couple moteur nécessaire à la mise en mouvement de
l’ensemble. Le constructeur a choisi un moteur électrique ayant un couple de 5 Nm. Conclure vis-à-vis
du choix du constructeur.
page 11/11Vous pouvez aussi lire