La Cobotique : un domaine pluridisciplinaire émergent utile à l'ergonome - Self
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
La Cobotique : un domaine pluridisciplinaire
émergent utile à l’ergonome.
Théo MOULIERES-SEBAN, David BITONNEAU, Jean-François THIBAULT, Jean-
Marc SALOTTI, Bernard CLAVERIE
Laboratoire IMS, 351 Cours de la libération, 33405 Talence cedex,
theo.moulieres-seban@u-bordeaux.fr, david.bitonneau@u-bordeaux.fr,
jean-marc.salotti@ensc.fr, bernard.claverie@ensc.fr
SAFRAN, 46 rue Camille Desmoulins, 92130 Issy-les-Moulineaux,
jean-francois.thibault@safran.fr
Résumé.
Dans l’industrie, l’optimisation des postes de travail pour améliorer la sécurité, la santé et la
performance des opérateurs est un enjeu déterminant. Dans cette communication, la cobotique
(robotique collaborative) est décrite comme une nouvelle solution au travers d’une démarche
pluridisciplinaire de recherche appliquée, initiée et pilotée par le groupe SAFRAN. Cet article
propose d’abord une grille de lecture des nouvelles technologies cobotiques comme une ré-
ponse aux problématiques des situations de travail difficilement automatisables. Puis il pose
les bases d’une démarche méthodologique issue à la fois de l’ergonomie dans les projets de
conception, de la cognitique dans la conception des interactions homme-robot et de la robo-
tique dans la conception du système mécatronique. Cette méthodologie est illustrée par un cas
pratique pour lequel aucune solution d’amélioration n’avait été trouvée jusqu’alors.
Mots-clés : Robotique collaborative, Ergonomie, Robotique industrielle, Conception de postes de tra-
vail.
Cobotics : an emerging multidisciplinary field useful for the ergonomist
Abstract.
In the industry, designing workstations to improve health, safety and performance for the
operators is a major issue. In this paper, cobotics (collaborative robotics) is shown as a new
solution through an innovative multidisciplinary approach developed by SAFRAN Group.
This article firstly proposes keys for understanding how cobotics technologies can provide an
answer when working situations cannot be automated. Then we lay the foundations of a
methodology coming from ergonomics in design projects, from cognitics in designing human-
robot interaction and from robotics in designing mechatronics systems. This methodology is
illustrated with a practical case for which no solution could have been found before.
Keywords: Collaborative robotics, Ergonomics, Industrial Robotics, Workstation design.
*Ce texte original a été produit dans le cadre du congrès de la Société d’Ergonomie de Langue Française qui s’est tenu à Marseille du 21 au
23 septembre 2016. Il est permis d’en faire une copie papier ou digitale pour un usage pédagogique ou universitaire, en citant la source
exacte du document, qui est la suivante :
T héo MOULIERES-SEBAN, David BITONNEAU, Jean-François T HIBAULT , Jean-Marc SALOT T I, Bernard CLAVERIE (2016). La
Cobotique : un domaine pluridisciplinaire émergent utile à l’ergonome, Actes du 51 ème Congrès de la SELF, Marseille, 21-23/09/16.
1
612 sciencesconf.org:self2016:95667
SELF 2016
Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
1. INTRODUCTION son poste de travail. De nouvelles problé-
L’optimisation des postes de travail est un matiques peuvent donc être traitées, comme
enjeu déterminant dans l’industrie. Elle peut l’intervention d’un opérateur dans un envi-
d’une part être motivée par des problèmes ronnement hostile en traitant en temps réel
de santé, de sécurité pour les opérateurs liés les variabilités et aléas de la situation. Ainsi
à des risques physiques : port de charge, sur un même poste en fonction de
efforts, répétitivité, maintien statique de l’expertise et les capacités de chacun, cer-
postures, vibrations, environnement dange- taines actions sont réalisées soit conjointe-
reux (pyrotechnique, radioactif, risque de ment par l’opérateur et le système, soit par
chute/collision, etc.) ; ou à des facteurs l’opérateur seul ou par le système en auto-
d’ambiance physique (température, humidi- nomie.
té, poussière, etc.). D’autre part, elle peut Par exemple, sur un poste de ponçage, la
être motivée par le besoin ou la volonté pièce peut être positionnée par l’opérateur
d’améliorer la performance au poste, en seul en utilisant un pont roulant, puis
termes de rapidité, de force, de précision, l’opérateur se saisit d’un bras robotique
d’amplitude de mouvement, mais aussi de muni d’une ponceuse et ponce la pièce.
répétabilité, de qualité, et de fiabilité. L’opérateur applique l’effort qu’il souhaite,
effectue le nombre de passages qu’il juge
Sur ces postes, il y a plusieurs voies pos- nécessaire et suit la trajectoire la plus adap-
sibles. La première, la plus classique, est la tée selon lui. Le bras robotique l’aide à por-
transformation de la tâche réalisée par ter son outil et absorbe les vibrations.
l’opérateur en modifiant ses outillages ou Cette nouvelle voie présente des spécifici-
son poste ; et en maintenant l’ensemble de tés qui, au premier abord, peuvent com-
son expertise. La seconde, de plus en plus plexifier le projet :
empruntée du fait des progrès techniques et - Habituellement, la conception de
des enjeux de productivité, est postes robotiques prend peu en compte
l’automatisation (ou robotisation) du poste. l’opérateur et ses variabilités.
Elle nécessite un transfert des savoirs et - Les solutions cobotiques (robots, sys-
savoir-faire de l’opérateur vers un système tèmes de sécurité, moyens
automatisé sur des postes généralement d’interaction) sont en perpétuelle évo-
répétitif et/ou routiniers. lution . Ainsi l’étude de faisabilité est
Cependant sur certains postes ou dans cer- souvent difficile à mener compte tenu
tains contextes, les cycles de production ne du peu de retours d’expérience sur la
permettent pas d’investir sur une automati- collaboration homme robot sur des
sation complète pour plusieurs raisons. Par postes industriels
exemple quand l’opération est ponctuelle et - Il faut intégrer les facteurs humains à
complexe, l’automatisation s’avère souvent la simulation du poste robotique
peu rentable. De plus, certains gestes pro- (Maurice, 2015), avec tout ce que cela
fessionnels et traitements cognitifs réalisés implique en incertitude (variabilités in-
par des opérateurs experts, en particulier ter et intra opérateur, divers moyens
pour réguler les variabilités, sont difficiles à d’interaction avec le robot, etc.).
automatiser.
Depuis quelques années, une troisième A partir d’une démarche pluridisciplinaire
voie est explorée : la cobotique. Le principe de recherche appliquée, initiée et pilotée par
est d’apporter à l’opérateur une assistance le groupe SAFRAN, ce papier propose : a)
robotique avec laquelle il peut interagir sur une grille de lecture des nouvelles techno-
2
613 sciencesconf.org:self2016:95667
SELF 2016
Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
logies cobotiques comme une réponse plu- techniques et en cognitique pour les IHR
ridisciplinaire aux problématiques des situa- (Interactions Homme-Robot).
tions de travail difficilement automati- L’expression « système cobotique » ne
sables ; b) puis pose les bases d’une dé- couvre pas uniquement le type de robot
marche méthodologique issue à la fois de appelé « cobot » par les industriels, il
l’ergonomie dans les projets de conception, couvre tous les systèmes robotiques avec
de la cognitique dans la conception des in- lesquels un opérateur peut interagir direc-
teractions homme-robot et de la robotique tement ou à distance.
dans la conception du système mécatro-
nique. 3. LES TECHNOLOGIES COBO-
TIQUES
2. DEFINITIONS Un robot peut prendre des formes très va-
2.1. Cobot riées suivant le besoin du poste de travail, le
L’origine du mot est le terme « cobot » is- besoin technique et les besoins d’IHR :
su de « collaborative » et « robot » (Peshkin - Robots séries : qui comportent classi-
& Colgate, 1999), employé au départ pour quement entre 3 et 7 axes. Ils sont po-
désigner un robot passif avec lequel un opé- lyvalents et permettent d’exécuter des
rateur interagit dans le même espace de tâches de plus en plus complexes avec
travail. Aujourd’hui, les industriels nom- rapidité, répétabilité et précision. Sui-
ment « cobot » des systèmes robotiques ne vant les modèles, leur portée peut être
nécessitant pas de barrière physique (carté- supérieure à 3 mètres et leur charge
risation) empêchant la présence de utile peut dépasser la tonne.
l’opérateur dans son espace de travail. - Robots parallèles : leur espace de tra-
2.2. Cobotique
vail, plus limité que les robots séries,
est compensé par de meilleures per-
Le champ de la robotique couvre la con-
formances en précision et rapidité.
ception et la réalisation de robots. De la
- Robots cartésiens : basés sur des dé-
même manière, dans l’industrie, la cobo-
placements linéaires, ils peuvent tra-
tique désigne la conception et la réalisation
vailler sur des espaces plus grands
de système cobotiques, c’est-à-dire non
(jusqu’à plusieurs dizaines de mètres)
seulement du robot en lui-même, mais aussi
et soulever des charges de plusieurs
et surtout du futur poste de travail de
tonnes.
l’opérateur à partir des interactions homme-
robot (Claverie, Le Blanc, & Fouillat, La - Robots mobiles/drones : terrestres (à
roues, à chenille ou pattes), marins,
Cobotique, 2013). De ce fait, l’ergonome
sous-marins ou volants. Ils permettent
doit travailler de concert avec d’autres spé-
d’effectuer diverses opérations (ins-
cialistes dans le processus de cobotisation
pection, maintenance, etc.), dans des
tout au long de la conduite du projet : de
milieux dangereux ou difficilement ac-
l’analyse préliminaire (analyse de l’activité
cessibles à l’homme.
des opérateurs dans les situations existantes
- Exosquelettes : robots revêtus par
et/ou de référence), aux simulations et ex-
l’homme (cf. 3.3).
périmentations (Thibault, 1998), en passant
- Solutions hybrides : il est possible de
par la conduite du projet et les choix tech-
combiner les avantages des différentes
niques de conception mécatronique du sys-
architectures précédentes par des solu-
tème. Dans une démarche cobotique,
tions hybrides, notamment pour des
l’ergonome peut ainsi s’appuyer sur des
besoins en mobilité (augmenter
compétences en robotique pour les aspects
3
614 sciencesconf.org:self2016:95667
SELF 2016
Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
l’espace de travail ou utiliser le sys- tif haptique, manipulation d’une ré-
tème en différents lieux). Par plique du robot ou de son effecteur.
exemple : - Des moyens tactiles : sur un écran ou
o Un robot série monté sur un une simple surface.
robot cartésien permet d’allier - Des moyens de capture du mouve-
grandeur d’espace de travail ment : eyetracking, capture du doigt,
avec polyvalence pour obtenir de la main, du bras, du corps entier.
de grandes trajectoires com- - Des moyens visuels (retours visuels
plexes, avec rapidité et préci- d’information) : écran, lunettes (réalité
sion. virtuelle, augmentée ou mixte), comp-
o Un robot série monté sur un teur, voyant.
robot mobile peut donner une - Des moyens sonores : commande vo-
troisième main capable de sou- cale, alarme, communication orale.
lever des charges importantes
et déplaçables entre les postes.
Nous allons développer ci-dessous trois
caractéristiques clés que l’on peut retrouver
dans les systèmes cobotiques.
3.1. Le pilotage à distance (téléopé-
ration)
La téléopération est « un ensemble de
techniques qui permettent à l’homme de
transposer ses capacités d’action (observa-
tion, manipulation) en temps réel à distance Figure 1 : Exemple de téléopération, manipulation d'une
réplique du robot (source : cea.fr).
grâce à des retours sensoriels » (Garrec, et
al., 2010) (de type retours visuels, d’efforts 3.2. La manipulation directe (coma-
et sonores). Elle peut être effectuée depuis nipulation parallèle)
un poste de commande éloigné (ex. salle de Le terme comanipulation est employé pour
commande, cf. Figure 1) mais aussi sur un désigner la manipulation directe du robot
poste déporté dans l’atelier (ex. pupitre par l’opérateur. L’opérateur se saisit direc-
dans l’atelier). Une donnée importante de la tement, à l’aide de poignées, ou par
téléopération est comment l’opérateur va se l’effecteur (cf. Figure 2) du robot pour pou-
représenter depuis son poste de pilotage, la voir le piloter. Le comanipulateur peut être
tâche effectuée par le robot dans l’atelier. aussi équipé de moyens de contrôle comme
Pour ce faire, il doit disposer des données des boutons de commande ou des écrans
techniques et sensorielles, et des moyens de suivant le besoin. Un poste en comanipula-
contrôle nécessaires au bon déroulement de tion nécessite une analyse des risques en
la tâche. La téléopération a été explorée sécurité complexe pour éviter que
notamment pour le nucléaire et la médecine l’opérateur subisse des chocs et des com-
(Pennel, Ferrel, Coello, & Orliaguet, 2002; pressions. Le pilotage doit être conçu pour
Barbé, 2008). être adapté à l’activité de l’opérateur : con-
A distance, il existe divers moyens trôle visuel, manipulation simple et intui-
d’interagir avec un robot comme : tive, position de confort, etc. Le plus sou-
- Des moyens physiques : bouton, mo- vent, la comanipulation sert à augmenter les
lette, joystick, souris, manette, disposi- efforts fournis par l’opérateur, à compenser
le poids, les inerties ou à guider avec des
4
615 sciencesconf.org:self2016:95667
SELF 2016
Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
chemins et surfaces virtuelles (Maurice,
2015).
Figure 3 : Exemple d'exosquelette d’aide au ponçage de la
marque Lockheed M artin (source : lockheedmartin.com).
4. DEMARCHE METHODOLOGIQUE
DE COBOTISATION
Figure 2 : Exemple de comanipulation avec le bras cobo- L’objectif de cette démarche méthodolo-
tique Kuka LWR (source : kuka-robotics.com).
gique n’est en aucun cas de concevoir un
3.3. L’assistance par un exosquelette système cobotique quel que soit le besoin et
Un exosquelette est un robot revêtu par le contexte de l’étude. Au contraire,
l’opérateur. Généralement, ils assistent les l’objectif est, à partir d’une analyse du
membres inférieurs, les membres supérieurs poste existant, de déterminer quelle solution
ou les deux (cf. Figure 3). Le plus souvent, d’amélioration est la plus adaptée, en envi-
ils sont utilisés pour diminuer les efforts sageant potentiellement la cobotique
fournis par les opérateurs, lors de manuten- comme opportunité. Dans cette partie, les
tions par exemple. Ils peuvent également étapes du processus de conception sont dé-
servir pour aider au maintien statique de crites, de l’analyse préliminaire à la mise en
l’opérateur. Par contre, ils ne sont actuelle- service (cf. Figure 4).
ment pas utilisés pour guider l’opérateur sur
les bonnes trajectoires.
Ce type de système cobotique est celui qui
est à ce jour le moins mature et le plus
complexe à mettre en œuvre. La première
raison est l’absence de connaissance sur les
potentiels effets de leur utilisation à long
terme, qui peuvent être problématiques no-
tamment du point de vue du report de
charge sur le corps de l’opérateur (Atain
Kouadio, Sghaier, & Picot, 2014). Il y a en
outre des problématiques complexes
comme par exemple l’attache de
l’exosquelette sur le corps, la batterie, les
articulations qu’il faut adapter à celles de
l’homme (Sylla, Bonnet, Venture,
Armande, & Fraisse, 2014a; 2014b), le
temps mis pour le revêtir ou encore le cali- Figure 4 : Processus global de conception d’un système
brage de l’assistance. cobotique industriel.
5
616 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
Nous allons illustrer chaque étape métho- Ainsi, à partir des connaissances en ergo-
dologique de la démarche à partir d’un pro- nomie, cognitique et robotique, des solu-
jet Safran de « cobotisation » qui servira de tions peuvent être directement écartées et
fil conducteur. Ce projet de cobotisation est d’autres sérieusement envisagées sans im-
le nettoyage d’une cuve cylindrique, souil- médiatement opter pour une seule solution
lée de produit visqueux et collant. précise. Bien que les compétences en robo-
4.1. Analyse de l’existant tique soient précieuses pour dégager des
contraintes techniques sur le poste et son
Analyse de l’activité de l’opérateur contexte, il faut éviter d’opter trop tôt pour
au(x) à poste(s)
une solution ou un emplacement dans
La première étape est bien entendu l’atelier par exemple. Par exemple, on pour-
l’analyse de l’activité de l’opérateur au(x) ra connaître les besoins du poste en ampli-
poste(s) de travail concerné(s). Une série tude de mouvement, en mobilité, en ca-
d’entretiens et d’observations permettent de dence, mais aussi en termes de gestes pro-
dégager un synoptique précis de l’activité, fessionnels (précision, variabilités, etc.) et
qui comprend l’intégralité des opérations en termes de complexité des traitements
avec les déterminants et conséquences pour cognitifs (anticipation, prise d’informations,
chacune d’elles, et qui intègre autant que etc.). Il convient d’aborder le problème plus
possible l’ensemble des variabilités (dues globalement en intégrant à l’étude tech-
au produit, au matériel, à l’environnement nique des données mises en valeur par les
et au contexte de travail, mais aussi les va- compétences en ergonomie et cognitique.
riabilités intra et inter opérateurs). Ainsi Ainsi, le système peut finalement être placé
tous les modes de fonctionnement du poste dans un autre atelier pour des raisons logis-
doivent être pris en compte, non seulement tiques, ou effectuer la tâche de manière to-
le fonctionnement nominal, mais aussi les talement différente compte tenu des capaci-
modes transitoire (phases de nettoyage et de tés nouvelles du système homme robot.
maintenance) et dégradé (dysfonctionne- Le résultat de cette première étape
ment d’un outil par exemple). Les étapes de d’analyse est la formalisation de tous les
production en amont et en aval du(des) éléments dans un cahier des charges fonc-
poste(s) étudié(s) doivent également être tionnel, ce qui permettra de démarrer les
incluses dans le périmètre de l’analyse. échanges avec des experts extérieurs à
De plus, lors de cette étape, il est impor- l’équipe projet.
tant d’identifier les attentes de la hiérarchie
Analyse de situations de référence
et des opérateurs sur l’amélioration du
poste, et de les compléter avec les résultats L’analyse de situations de référence est un
de l’analyse de l’activité. Avec ces élé- retour d’expérience sur des postes de travail
ments, l’ergonome va pouvoir reformuler ayant des similarités avec le probable futur
les objectifs du projet. poste. Cela peut être, par exemple, l’analyse
En effet, tout au long de l’analyse de de postes de commande dans la même en-
l’activité, les solutions pour l’amélioration treprise pour en connaître les standards, les
doivent être envisagées afin de recueillir au avantages et les inconvénients, ou encore
mieux tous les éléments nécessaires à la l’analyse d’un poste dans une autre usine
conception. L’expertise de l’opérateur, pour lequel le procédé utilisé est très proche
constituant le cœur de son activité, doit être du probable futur procédé. L’analyse de
mise en valeur, et les phases de l’activité où situations de référence permet, que ce soit
il n’y a pas de valeur ajoutée également. sur le plan organisationnel, technique, et
des interactions homme/système, d’obtenir
6
617 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
des indications sur ce qui fonctionne ou d’anticiper ses problématiques et de gérer
non, sur des bonnes pratiques et sur des les risques associés.
points de vigilance. Exemple projet cobotique Safran :
Exemple projet cobotique Safran : Le premier essai technique réalisé a été
L’analyse de l’existant du nettoyage des celui de l’hydrogommage, une technolo-
cuves a permis de dégager un ensemble gie jamais utilisée jusqu’alors pour ce
de variabilités concernant par exemple le type de problématique. L’essai a révélé
produit et son état, l’état des cuves lors que l’hydrogommage décolle bien le pro-
de leur arrivée, et les différentes mé- duit, mais que son utilisation n’est pas
thodes employées par les opérateurs pour compatible avec le cycle de production et
le nettoyage. Plusieurs technologies ont la géométrie de la cuve. Ainsi des essais
été envisagées suite à cette étude, dont de raclage robotique, technique similaire
principalement le raclage robotique et à celle employée manuellement par les
l’hydrogommage (projection d’eau et de opérateurs, ont permis de dimensionner la
granules sur les parois de la cuve). solution technique en termes de force,
d’amplitude de mouvement, et d’obtenir
4.2. Essais techniques
des éléments sur les trajectoires de ra-
En parallèle de l’analyse de l’activité et
clage.
tout au long de la conception, des essais
techniques jalonnent le processus de con- 4.3. Options générales de concep-
ception. Ces essais sont liés : tion
soit aux procédés industriels utili- Après les principaux essais techniques et
sés sur le poste de travail : traite- l’analyse de l’activité, il convient, notam-
ment de surface, peinture, net- ment par la consultation d’experts (de four-
toyage, polissage, soudage, assem- nisseurs potentiels, par exemple), de conce-
blage, découpe, démoulages, voir un principe de solution, c’est-à-dire de
broyage, mélange, contrôles non déterminer la forme globale de la solution
destructifs, etc. ; et son fonctionnement sommaire.
soit aux outils et technologies envi- La méthodologie n’a pas pour but de pré-
sagés sur le futur poste : visseuse coniser l’installation d’un système cobo-
dynamométrique, contrôleur phy- tique quel que soit le besoin, mais
sique à retour d’effort, écran de ré- d’envisager l’ensemble des possibilités
alité augmentée, préhenseur, effec- (automatiques, mécaniques, robotiques,
teur robotique, etc. organisationnelles, et cobotiques plus spéci-
Le but de ces essais est de déterminer les fiquement) et d’opter pour celles qui répon-
possibilités d’automatisation des procédés dent le mieux à la problématique du poste.
industriels ou d’évaluer l’apport d’outils et Dans le cas d’une orientation vers un sys-
technologies alternatives à celles employées tème cobotique, une attention particulière
sur le poste actuel. Ils permettront doit être portée à la répartition des tâches
d’orienter les futurs choix de conception entre l’homme et le robot en fonctionne-
technique en donnant des éléments de fai- ment nominal, transitoire et dégradé, afin de
sabilité technique. réguler les variabilités de façon optimale
Pour un système industriel, la maturité suivant les capacités et l’expertise de cha-
technique est déterminante. A l’issu de cette cun. Cette répartition des tâches s’appuie
étape, le système technique doit être suffi- sur les compétences de l’ergonome pour la
samment éprouvé pour permettre prise en compte de l’activité de l’opérateur,
7
618 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
du cogniticien pour la conception des IHR rents modes de fonctionnement, issus de
et du roboticien pour la faisabilité technique l’analyse de l’activité et des options géné-
de la solution. rales de conception. Les compétences en
A cette étape, pour convaincre les déci- jeu peuvent également servir à réaliser les
deurs et avoir une représentation commune maquettes numériques, notamment en robo-
et rapide de la solution, il peut être oppor- tique pour la partie informatique et simula-
tun de réaliser une maquette numérique tion numérique du robot. De nombreuses
sommaire du poste (qui peut par exemple pistes existent en ce qui concerne la réalisa-
être réalisée par le roboticien) afin de dé- tion de maquettes : la maquette sur plan,
crire les grands principes de la solution. 3D, carton, en réalité virtuelle, réalité aug-
Exemple projet cobotique Safran : mentée ou réalité mixte. Pour chacune
d’entre elles, il faut faire des choix suivant
Suite aux essais et échanges avec des
les hypothèses à tester, sur l’interactivité de
experts, le principe retenu pour nettoyer
la maquette, la simulation ou non de
les cuves est un bras robotique suspendu
l’opérateur, du robot, de l’objet de la tâche
sur une poutre robotisée au-dessus de la
et de l’environnement. Il est donc important
cuve. Le bras peut effectuer des cycles
de réaliser la maquette ayant le meilleur
semi-automatiques de nettoyage, où soit
compromis entre le temps de mise en œuvre
il est en autonomie complète, soit il est
et de modification, la représentativité sou-
piloté directement par l’opérateur (qui se
haitée et les types d’hypothèses à valider
trouve dans un poste de commande à dis-
(Thibault, 1998).
tance pour des raisons de sécurité pyro-
La simulation sur maquette permet ainsi
technique). Une maquette numérique
non seulement de tester les hypothèses de
sommaire a été réalisée pour présenter départ, mais aussi de discuter avec toutes
ces principes de solution.
les parties prenantes du projet sur une
4.4. Etude de base : conception même représentation du poste futur. Elle
technique et maquettage améliore l’acceptabilité de la solution
Dans cette étude, la conception passe par puisque tout le monde participe à son élabo-
la réalisation de scénarios de l’activité fu- ration.
ture et de maquettes souvent numériques Le résultat de l’étude de base est la consul-
plus élaborées. Au départ, le scénario et la tation de fournisseurs sur la base d’un ca-
maquette ne sont pas très détaillés, ils si- hier des charges d’un prototype qui servira
mulent les situations de travail futures, et de démonstrateur et sera l’artefact central
sont mis à l’épreuve par les différentes par- de l’étude de détail.
ties prenantes du projet. La deuxième série
Exemple projet cobotique Safran :
est plus précise et ainsi de suite jusqu’à
obtenir une maquette et un scénario précis, Les maquettes réalisées à cette étape
validés par toutes les parties prenantes. pour le projet nettoyage de cuves sont dé-
Pour l’élaboration des scénarios, les com- taillées au §5. La consultation de fournis-
pétences en ergonomie, cognitique et robo- seurs pour le prototype est en cours au
tique sont encore une fois essentielles, pour moment où cet article est rédigé.
la prise en compte de l’opérateur, la con- 4.5. Etude de détail
ception des IHR et la faisabilité (les con- L’étude de détail suit le même principe
traintes techniques). La construction de que l’étude de base, elle en est la suite lo-
scénarios cohérents et robustes passe par gique. Les simulations qui accompagnent
l’intégration des variabilités et des diffé- l’étude de détail se basent sur un prototype
8
619 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
(version non définitive du système). Ce dispose de l’ensemble des données pour que
prototype peut être installé dans les locaux la solution prenne en compte tous les résul-
du fournisseur choisi suite à la consultation tats issus des études précédentes pour ré-
de l’étude de base, en bénéficiant ainsi de pondre au besoin (l’ergonome a de ce point
toute la logistique du fournisseur (outils de vue un rôle primordial).
robotiques, compétences spécifiques, …). Enfin, le nouveau système cobotique est
Pour mettre le prototype à l’épreuve, la par- installé, réglé et qualifié pour être mise en
ticipation des opérateurs est une plus-value service. Les opérateurs utilisant le système
déterminante pour l’évaluation des scéna- doivent obligatoirement être formés à son
rios, de la pertinence de la solution face aux utilisation. La formation est à ce moment
différents modes de fonctionnement, no- cruciale, en particulier dans l’acceptation du
tamment les modes dégradés, et pour système par ses futurs utilisateurs. Par con-
l’acceptabilité du système. séquent, elle ne doit pas se contenter de la
Ainsi, il n’est pas nécessaire d’investir sur théorie, mais bien être centrée sur la pra-
du matériel avant la réalisation. Le résultat tique à savoir la maîtrise des futures situa-
de cette étude est un cahier des charges tions de travail.
technique précis ainsi qu’une étude Si besoin, il doit être possible par le four-
d’implantation et des changements organi- nisseur ou en interne dans l’entreprise,
sationnels (dont l’accompagnement par les d’assurer des retouches finales vis-à-vis du
formations). système cobotique et surtout de pouvoir le
Exemple projet cobotique Safran : maintenir dans de bonnes conditions. En-
core une fois l’ergonome s’assurera lors de
Dans le cadre du prototype de net-
l’étape de réglages et de qualification que le
toyage, il est prévu, dans les locaux du poste est adapté à l’ensemble des opérateurs
fournisseur, d’installer un robot racleur et
(production, maintenance, …) aussi bien
une réplique de cuve afin de tester plus
d’un point de vue caractéristiques phy-
finement scénarios et les interactions
siques que sur les méthodes de travail à
prévues lors de l’étude de base. Les at-
mettre en œuvre. A ce stade, des formations
tentes sur ce prototype sont d’obtenir la
complémentaires peuvent être si besoin
confirmation d’une faisabilité opération-
implémentées.
nelle de la solution, des spécifications
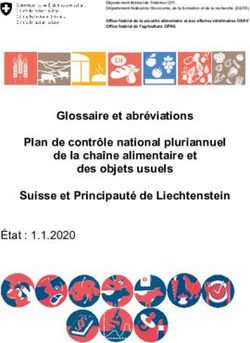
techniques du moyen de nettoyage, avec 5. EXEMPLE DE SIMULATION LORS
des séances de simulations intégrant les DES ETUDES DE BASE : CAS
opérateurs. PRATIQUE
4.6. Réalisation et mise en œuvre Dans le cadre d’une démarche cobotique
Cette dernière étape va permettre de réali- dans le groupe Safran, nous avons mis en
ser une consultation de fournisseurs à l’aide œuvre une simulation qui illustre bien la
du cahier des charges technique afin pluridisciplinarité et l’intérêt de la méthode.
d’industrialiser le nouveau système cobo- Comme précédemment spécifié, le sujet est
tique. Un fournisseur est choisi suivant plu- le nettoyage d’une cuve cylindrique, souil-
sieurs critères (qualité de la solution, coût, lée de produit visqueux et collant.
expérience sur le sujet, capacité à avoir un Suite à l’analyse de l’activité et à l’avant-
suivi sur le long terme pour les mainte- projet sommaire, nous sommes arrivés au
nances, etc.) dans le but d’industrialiser la principe de solution suivant : un bras robo-
solution. L’équipe projet quant à elle suit la tique suspendu sur une poutre robotisée au-
réalisation en s’assurant que le fournisseur dessus de la cuve. Le bras peut effectuer
9
620 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
des cycles semi-automatiques de nettoyage,
lors desquels soit il est en autonomie, soit il
est piloté directement par l’opérateur qui se
trouve dans un poste de commande à dis-
tance.
Suite à cela, une maquette a été réalisée
pour tester :
- Le positionnement des caméras dans
l’atelier
- La pertinence et la réponse au besoin
des données affichées à l’opérateur
- L’organisation de ces données Figure 6 : Capture d’écran lors d’un test utilisateur sur la
- Le moyen de pilotage du robot par maquette réalisée avec le logiciel V-REP®.
l’opérateur
- Un scénario complet de nettoyage con- 6. CONCLUSION
tenant quelques situations singulières La démarche méthodologique présentée
comme des dysfonctionnements dans cette communication préfigure une
Tout en échangeant sur leur sujet à tout démarche globale dans le groupe Safran.
moment au cours de la réalisation, le cogni- Elle mérite d’être affinée suivant le retour
ticien et l’ergonome ont maquetté l’écran de d’expérience des projets en cours, en parti-
retour d’informations, le moyen culier sur la formation des opérateurs, qui
d’interaction (joystick et/ou interface hap- pourra débuter grâce au démonstrateur
tique) et conçu les scénarios issus de avant la réalisation du système final. De
l’analyse de l’existant. Le roboticien a pro- plus, au-delà du cas d’application de net-
grammé un comportement pour un robot toyage des cuves, cette démarche méthodo-
virtuel dans un environnement virtuel, et a logique va être appliquée sur un autre poste
ajouté la possibilité de le piloter directe- de travail afin d’être éprouvée, complétée et
ment par exemple avec un (cf. Figure 6 & améliorée.
Figure 6). Au besoin, suivant les résultats Les résultats principaux de la démarche
des tests utilisateurs, d’autres moyens de sont l’intérêt de la prise en compte pluridis-
pilotage pourront être couplés à la maquette ciplinaire de l’activité de travail, la cons-
pour être essayés, avec un temps truction mentale des futures situations de
d’adaptation court. travail lors des simulations et l’élaboration
en parallèle d’une faisabilité technique.
L’interfaçage de l’ergonomie, de la cogni-
tique et de la robotique nous apparaît dé-
terminant dans la conception centrée hu-
main de systèmes cobotiques (cf. Figure 7).
En effet, l’ergonomie nous apparait fon-
damentale (Barcellini, Van Belleghem, &
Daniellou, 2013; Garrigou, Thibault,
Jackson, & Mascia, 2001) dans :
- la gestion du projet industriel,
- l’analyse de l’activité,
- la prise en compte de l’opérateur et de
Figure 5 : Photographie de la maquette d'un système l’organisation du travail,
cobotique en cours d'utilisation.
10
621 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
- la conception des interactions lors des 229-244). Secaucus, NJ, USA:
simulations ou directement sur le nou- Springer-Verlag New York, Inc.
veau poste de travail. Aries, S., Le Blanc, B., & Ermine, J.
De plus, la cognitique nous apporte des (2008). MASK : une méthode
éclairages très pertinents (Boy, 2013; Lini, d'ingénierie des connaissances pour
2013; Claverie, 2005; Aries, Le Blanc, & l'analyse et la structuration des
Ermine, 2008) vis-à-vis de : connaissances. Dans Traité IC2,
- l’expertise de l’opérateur, de ses gestes Série Management et Gestion des
professionnels, et des processus cogni- STIC.
tifs mis en jeu, Atain Kouadio, J. J., Sghaier, A., & Picot,
- l’élaboration des IHR ou des interac- D. (2014). Les Robots d'assistance
tions homme/simulateur, physique : fonctionnement et modes
- le développement conjoint de l’analyse d'utilisation en industrie. 50ème
et de la solution technique pour assister Congrès de la SELF, (pp. 560-567).
l’opérateur. Barbé, L. (2008). Téléopération avec
Pour finir, les compétences en robotique retours d'efforts pour les
(Angeles & Park, 2007; Naveen Kumar & interventions percutannées (Thèse
Shivraj Narayan, 2011) permettent : de doctorat). Université Louis
- l’analyse des besoins techniques et Pasteur - Strasbourg I, 2007.
fonctionnels, Barcellini, F., Van Belleghem, L., &
- le dimensionnement du système, Daniellou, F. (2013). Les Projets de
- l’évaluation des solutions techniques en conception comme opportunité de
fonction des possibilités technolo- développement des activités.
giques, sur un secteur en perpétuelle Ergonomie Constructive, (pp. 191-
innovation, 206).
- la réalisation de simulations, Boy, G. (2013). Orchestrating Human-
- le suivi technique du projet. Centered Design. Springer.
Claverie, B. (2005). Cognitique : Science et
pratique des relations à la machine
à penser. L'Harmattan.
Claverie, B., Le Blanc, B., & Fouillat, P.
(2013). La Cobotique. Presses univ.
de Bordeaux | « Communication &
Organisation », vol.2 n° 44, 203-
214.
Garrec, P., Measson, Y., Gelin, R.,
Friconneau, J. P., Desbats, P., &
Figure 7 : Schéma des compétences mises en jeu dans la Riwan, A. (2010). Téléopération: les
méthodologie de "cobotisation". applications en zone contrôlée.
Techniques de l'ingénieur, S7812 1-
7. BIBLIOGRAPHIE S7812 15.
Angeles, J., & Park, F. C. (2007). Garrigou, A., Thibault, J. F., Jackson, M.,
Performance Evaluation and Design & Mascia, F. (2001). Contributions
Criteria. Dans B. &. Siciliano, et démarche de l'ergonomie dans les
Springer Handbook of Robotics (pp. processus de conception. PISTES,
vol.3 n°2.
11
622 sciencesconf.org:self2016:95667
SELF 2016Archivé électroniquement et disponible en ligne sur :
51ème Congrès International
Société d’Ergonomie
de Langue Française https://www.ebscohost.com/corpor
www.ergonomie-self.org ate-research/ergonomics-abstracts
Texte original*.
Lini, S. (2013). L’anticipation et sa
représentation dans les interfaces
homme-système en aéronautique
(Thèse de doctorat). Université
Bordeaux I.
Maurice, P. (2015). Virtual Ergonomics for
the design of collaborative robots
(Thèse de doctorat). Université
Pierre et Marie Curie, Paris IV.
Naveen Kumar, P., & Shivraj Narayan, Y.
(2011). Simulation in Robotics.
National Conference on Recent
Advances in Manufacturing
Engineering & Technology, (pp. 24-
30).
Pennel, I., Ferrel, C., Coello, Y., &
Orliaguet, J. P. (2002). Contrôle
sensori-moteur en situation de
téléopération : données théoriques et
perspectives ergonomiques. Le
travail humain, vol.65 n°1, 29-58.
Peshkin, M., & Colgate, J. (1999). Cobots.
Industrial Robot: An International
Journal, vol.26 n°5, 335-341.
Sylla, N., Bonnet, V., Venture, G.,
Armande, N., & Fraisse, P. (2014a).
Assessing neuromuscular
mechanisms in human-exoskeleton
interaction. 36th International
Conference of Engineering in
Medicine and Biology Society (pp.
1210-1213). Chicago, IL, USA:
EEE, Engineering in Medicine and
Biology.
Sylla, N., Bonnet, V., Venture, G.,
Armande, N., & Fraisse, P. (2014b).
Human arm optimal motion analysis
in industrial screwing task. 5th
International Conference on
Biomedical Robotics and
Biomechatronics (pp. 964-969). São
Paulo, Brazil: IEEE RAS & EMBS.
Thibault, J. (1998). Instrumenter les
simulations. Performances n°97, 14-
22.
12
623 sciencesconf.org:self2016:95667
SELF 2016Vous pouvez aussi lire