Le siècle de la voiture intelligente
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Le siècle de la voiture
intelligente
© Transvalor – Presses des MINES, 2009 60 boulevard Saint Michel – 75272 Paris cedex 06 – France email : presses@mines-paristech.fr http://www.ensmp.fr/Presses © photos de couverture : Centre de Robotique, Intempora. ISBN : 978-2-911256-10-3 Dépôt légal 2009 Achevé d’imprimer en 2009 (Paris) Tous droits de reproduction, de traduction, d’adaptation et d’exécution réservés pour tous les pays.
Claude Laurgeau
Le siècle de la voiture
intelligente
Collection Mathématiques et informatique
Dans la même collection
Le traité de la réalité virtuelle
Direction P. Fuchs, Coordination générale : G. Moreau
Coordination du volume : S.Donikian
Le traité de la réalité virtuelle, volume 5
Les humains virtuels
Coordination du volume : B. Arnaldi et P. Guitton
Le traité de la réalité virtuelle, volume 4
Les applications de la réalité virtuelle
Coordination du volume : G. Moreau et J. Tisseau
Le traité de la réalité virtuelle, volume 3
Outils et modèles informatiques des environnements virtuels
Coordination du volume : J-M. Burkhardt et S. Coquillart
Le traité de la réalité virtuelle, volume 2
L'interfaçage, l’immersion et l’interaction en environnement virtuel
Coordination du volume : A. Berthoz et JL. Vercher
Le traité de la réalité virtuelle, volume 1
L’homme et l’environnement virtuel
Edited by John Cagnol and Jean-Paul Zolesio P.
Information Processing
Recent Mathematical Advances in Optimization
François Goulette
Modélisation3 D automatique
Outils de géométrie différentielle
PREMIERE PARTIE
Les systèmes de transport
intelligents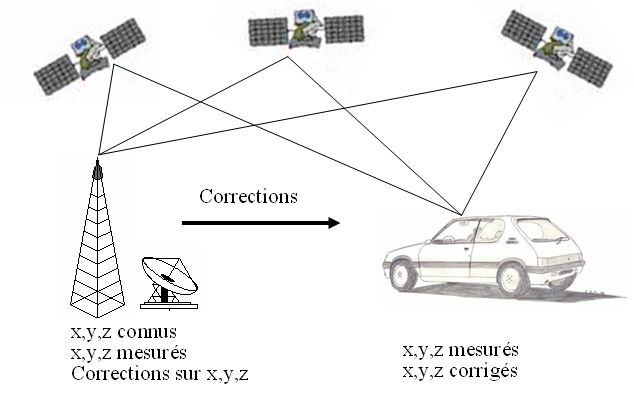
INTRODUCTION
Cet ouvrage n’accédera pas à la postérité, car il en est ainsi dans le monde des
nouvelles technologies, qui évoluent très vite : ce qui est écrit aujourd’hui sera
obsolète dans quelques dizaines d’années et même avant. Il faut positiver et trouver
à cela au moins un avantage, c’est la certitude que les lecteurs et l’auteur ont été
contemporains le temps de quelques décennies, qu’ils ont un même vécu et peuvent
partager un même contexte, conditions impossibles à rassembler un siècle plus tard.
Les lecteurs de ce futur lointain pourraient difficilement imaginer l’importance des
mutations techniques que notre génération a connues pendant les vingt dernières
années.
Ce document a été rédigé pendant l’été 2009, à l’occasion du vingtième
anniversaire du Centre de Robotique de l’Ecole des Mines de Paris. Ce laboratoire
créé ex nihilo en 1989, a orienté ses activités de recherche autour du thème de la
robotique autonome communicante. Bien que plusieurs thèmes de recherche
différents aient été abordés sur ces vingt années, l’essentiel de l’activité s’est centrée
sur la voiture intelligente, regardée comme un robot mobile ayant déjà son
autonomie énergétique mais pas encore son autonomie décisionnelle.
Le mémoire comprend deux parties :
• Une première partie dédiée aux systèmes de transports intelligents au sens
large permettant au lecteur de se familiariser avec l’environnement technique
du sujet.
• Une seconde partie où sont décrites les principales actions de recherches
conduites au Centre de Robotique sur ce sujet.
L’auteur tient à remercier ses collègues chercheurs du Centre de Robotique pour leur
contribution à la rédaction de la seconde partie.
LES « TIQUE S » ET LES « TIC S »
L’ère des « TIQUE s »
L’ère des IQUE s va couvrir une période d’une quinzaine d’années, de 1975 à 1990
environ. Toute une génération de mots recouvrant des concepts liés à l’innovation
dans un domaine d’activité humaine apparaît. Certains de ces mots vont survivre,
d’autres vont être effacés par le temps. Citons en vrac : robotique, mécatronique,
productique, bureautique, télématique, transitique, domotique, constructique,
agriotique, ….
Certains de ces mots sont entrés dans les dictionnaires, un grand nombre font l’objet
d’un article dans Wikipédia, de plus ou moins grande qualité en fonction des
contributeurs.
La robotique a fait son apparition en France dans les années 1970, associée à des
bras manipulateurs se substituant à l’homme dans des opérations répétitives de8 Les systèmes de transport intelligents manutention d’outils ou de pièces, opérations telles que le chargement ou déchargement des machines, le soudage, la peinture…on parle alors de robotique manufacturière. Puis le concept s’est étendu à la robotique dite de service dans laquelle le robot devient une machine autonome capable de se déplacer, de comprendre et d’agir sur son environnement. Dès lors, la robotique est un sur- ensemble de la perception avancée (reconnaissance et interprétation de scènes visuelles, reconnaissance et synthèse des sons), des sciences du raisonnement (méthodes d’apprentissage, intelligence artificielle) et de l’action (systèmes de contrôle avancés, logiciels temps réel). Le néologisme « productique » a été créé en 1979 par la société Philips pour désigner les applications informatiques dans le domaine de la production industrielle. Il provient de l'amalgame des mots « production » et « informatique ». La productique est donc a priori un sur-ensemble de la Conception Assistée par Ordinateur (CAO), des Machines Outils à Commande Numérique (MOCN), de la robotique manufacturière et de la gestion de production. La productique a surtout établi l’importance et même la prééminence de l’organisationnel sur le tout technologique. Rien ne sert d’investir dans la haute technologie si l’organisation technique et humaine est défectueuse. La mécatronique qui a fait son apparition dans le Larousse en 2005 est un concept d’origine japonaise. Il puise dans la mécanique et dans l’électronique dont il fait l’amalgame. Peu usité pendant de nombreuses années, il est remis en lumière aujourd’hui en France par plusieurs des pôles de compétitivité. La bureautique, apparue vers 1980, correspond à l’automatisation des opérations de bureau. Il faut se replonger dans le contexte de l’époque avec les machines à écrire à mémoire, le papier carbone pour les copies, les premières machines à photocopier, les télex…. pour comprendre la révolution qui a résulté du déploiement massif de la micro-informatique. Le bureau de secrétariat du passé était composé de trois parties : le plan de travail proprement dit sur lequel étaient produits les documents (lettres, devis) avec l’aide de machines à écrire et à calculer, deux casiers pour l’arrivée et le départ des courriers et des armoires pour le rangement et l’archivage. Les logiciels bureautiques d’aujourd’hui reprennent cette même organisation qu’ils dématérialisent et à laquelle ils ajoutent une totale flexibilité. La production des documents est assurée par les traitements de texte, les tableurs, les grapheurs. La communication se fait par le courrier électronique avec une éventuelle assistance du fax, et l’archivage est assuré par les bases de données. Mais bien d’autres fonctions d’assistance sont offertes telles que les dictionnaires en ligne, les corrections orthographiques et grammaticales intégrées, la traduction automatique, la gestion d’agendas, et même les téléréunions avec l’écrit, l’image et le son. Le terme Télématique a été inventé par Simon Nora et Alain Minc dans le livre L'informatisation de la Société (La Documentation Française, 1978). Il résulte clairement de l’hybridation des mots télécommunication et informatique. Les auteurs imaginent les potentialités résultant de la connexion de terminaux permettant la visualisation de données informatiques stockées dans des ordinateurs à travers les réseaux de télécommunication. La mise en œuvre du concept va donner naissance au
Introduction 9
Minitel et au réseau Télétel reconnu dans le monde entier comme le premier réseau
télématique grand public.
Le relatif succès du Minitel sera
toutefois éclipsé par l’avènement de
l’Internet et le terme télématique sera
de moins en moins usité. Il est
intéressant de noter qu’il est remis au
goût du jour par les constructeurs
automobiles qui parlent d’unité
télématique pour définir un système
embarqué comprenant un navigateur
GPS, une carte SIM, un lecteur mp3,
le tout capable de communiquer avec
des systèmes nomades via Bluetooth
Le Minitel en 1982 ou vers l’infrastructure via DSRC. La
télématique routière existe.
La transitique est un sous-ensemble de la productique et de la logistique. Elle
concerne l’automatisation des fonctions de manipulation et de transfert de pièces, de
produits finis, ou d’outils au sein même de l’entreprise de production. La transitique
recouvre aussi l’identification des objets à manipuler par les technologies RFID ou
code barres, les outils logiciels de pilotage et de supervision des flux physiques.
C’est donc la logistique interne à l’entreprise.
La domotique rassemble les innovations qui résultent des nouvelles technologies au
service de l’habitat. La domotique offre des fonctions comme le contrôle programmé
ou à distance de l'éclairage, du chauffage, la gestion d'énergie, la sécurité des biens
ou des personnes, et la communication. On peut y ajouter les ouvertures et
fermetures à distance des portes de garages, des volets roulants, l’arrosage des
jardins et aussi la robotique d’assistance à l’intérieur des maisons (robots aspirateurs
ou assistance aux handicapés) et à l’extérieur (robot de tonte des pelouses).
Mécatronique = Mécanique Électronique
Productique = Production Informatique
Bureautique = Bureau Informatique
Télématique = Télécommunications Informatique
Transitique = Transferts Informatique
Constructique = Construction Robotique
Agrotique = Agriculture Informatique
D’autres termes ont existé de manière éphémère dans les années 1990 comme
Agrotique couvrant la robotisation des activités agricoles (taille automatique de la
vigne, robot de traite des vaches, machines agricoles guidées par GPS …) ou10 Les systèmes de transport intelligents
Constructique traduisant l’apparition dans l’industrie du bâtiment de la robotique
de chantier et de la domotique dans l’habitat.
L’auteur de ce livre a lui-même créé le terme de « Novotique » en 1983 pour parler
de manière générale des technologies innovantes issues des sciences de
l’information et de la communication, et créé une collection d’ouvrages du même
nom.
De manière surprenante, les termes les plus anciens Automatique et Cybernétique
sont assez peu utilisés pour parler des nouvelles technologies.
L’ère des « TIC s »
L’ère des TIQUEs aura duré une vingtaine d’années avant d’être supplantée par l’ère
des TIC s. Les TIQUES avaient l’avantage de décliner des domaines applicatifs des
nouvelles technologies dans des secteurs de l’activité humaine. Le X-TIQUE est
relativement bien cerné et compris aussitôt que la variable X est définie. Avec les
TICs, cela est beaucoup moins vrai.
Le premier spécimen des termes en TICs est le sigle NTIC pour Nouvelles
Technologies de l’Information et de la Communication. Il faut avouer que l’on
s’élève là au niveau des métas concepts et que cela ne parle guère au citoyen
ordinaire. Il y a d’abord le N de nouveau mais dix ou quinze ans après, faut-il
continuer à parler de NTIC ou simplement de TIC ? Il y a ensuite le I de information
et le C de communication, mais il s’agit de « information » et non « informatique »
et de « communication » et non de « télécommunication ». Le T est celui de
« technologie » et non de « technique ». Bref nous pouvons dire que cela est assez
flou et même assez technocratique.
Mais nous ne pouvons faire abstraction des TIC s car elles s’imposent à nous au
niveau des instances de gouvernance nationale et surtout européenne. Elles dérivent
de leurs homologues en anglais, l’I S pour Information Society, l’IT pour
Information Technology, NICT pour New Information and Communication
Technologies ou simplement ICT pour Information and Communication Technolgy.
Au-delà des mots, qu’y a-t-il de nouveau pour justifier le passage de TIQUE à TIC ?
Posons nous une question simple : quelles sont les quatre innovations qui ont le plus
modifié la société tout entière sur les quinze dernières années ?
Sans chercher longtemps, nous allons annoncer : la téléphonie mobile GSM,
l’ordinateur individuel et portable, l’Internet, et le GPS.
À dire vrai tout le monde trouve rapidement les trois premiers sans préciser l’ordre.
Toutefois, les gens pensent moins spontanément aux systèmes de localisation et de
navigation GPS.
• La téléphonie mobile ou GSM : Le Bi Bop fut de 1993 à 1997 le premier
réseau de téléphonie mobile en France. Il fut rapidement remplacé par le GSM
(Global System for Mobile communication). En 1995, le taux de pénétration
du téléphone mobile en France était de 3 %. Il a connu, comme dans tous les
pays du monde une très forte croissance. En octobre 2008, ce taux est passé àIntroduction 11
88% avec plus de 52 millions d’utilisateurs. Malgré ce résultat impressionnant,
la France se situe à la dernière place européenne puisque la moyenne de
l’EU27 est de 119%, avec 129% en Allemagne et 152% en Italie. Cela signifie
que de nombreux européens ont plusieurs téléphones mobiles à usage privé ou
professionnel. Jamais, dans l’histoire de l’humanité, une innovation
technologique ne s’est disséminée aussi vite et aussi massivement.
• Le PC (Personal Computer) fixe ou portable : il n’y a pas d’organisme
officiel en France, pour le suivi du parc informatique. Mais l’Université de
Sherbrooke au Canada établit à partir des données de la banque mondiale des
modèles de prédiction fiables, selon lesquels la France compte, en 2008, 81
ordinateurs pour 100 habitants.
• Internet : selon l’ARCEP (Autorité de Régulation des Communications
Electroniques et des Postes), le nombre d’abonnés Internet en France fin mars
2009 était de 18,350 millions. La croissance sur un an a été de 13% soit 2,1
millions d’abonnés supplémentaires. Tout en étant largement dépassé par la
téléphonie mobile, la diffusion de l’accès à Internet est aussi très
impressionnante.
• Navigateur GPS : il est plus difficile de trouver pour la France des statistiques
sur la pénétration des systèmes de navigation mobiles autonomes ou intégrés
dans les smart phones. En 2005, il s’était vendu 5,8 millions d’unités en
Europe et 4,3 millions d’unités pour le seul premier trimestre 2006. En France,
il s’est vendu 2,5 millions de navigateurs nomades en 2007 et trois millions en
2008. Sans atteindre les niveaux du GSM et de l’Internet, ces taux de
croissance sont considérables et supérieurs à la progression de la photo
numérique par exemple.12 Les systèmes de transport intelligents
LES GRANDS PROBLEMES DE L’AUTOMOBILE AU DEBUT DU VINGT
ET UNIEME SIECLE
Quatre problèmes principaux interpellent aujourd’hui la société : l’énergie,
l’environnement, la sécurité et la congestion. Il y a encore quelques années, l’ordre
aurait été sécurité, congestion, énergie, impact climatique... mais en peu de temps, la
société a pris conscience des importances relatives des problèmes et a réordonné les
priorités.
L’énergie
Toutes les énergies fossiles (charbon, pétrole, gaz) résultent de la transformation sur
des millions d’années des organismes vivants végétaux ou animaux. Or, en moins
d’un siècle, l’humanité a déjà quasiment épuisé ces ressources. Quand on dit
l’humanité - ce n’est pas exact. Il y a sur la micro planète « Terre » un peu plus de
six milliards d’humains et environ un milliard de véhicules, mais ceux-ci ne sont
pas distribués de manière homogène parmi les populations. Les pays riches, c'est-à-
dire l’Amérique du Nord, l’Europe de l’Ouest et l’Asie de l’Est possèdent plus de
six cents millions de véhicules (soit 60% du parc mondial) alors que leur population
représente moins d’un milliard de personnes, soit 15% de la population mondiale.
Pour amener la Chine aux mêmes taux d’équipement que nos pays il faudra
fabriquer l’équivalent du stock total de véhicules qui existent aujourd’hui sur la
terre.
La capacité de production de la vingtaine de grands constructeurs automobiles
mondiaux est d’environ 70 millions de voitures par an. C’est à la fois peu, puisque
cela ne fait qu’une voiture neuve fabriquée par an et pour cent habitant, mais c’est
bien trop, quand on sait que les matières premières et l’énergie vont manquer pour
les fabriquer, ainsi que le carburant pour les faire rouler…
L’environnement
On a popularisé récemment un indicateur d’empreinte carbone des voitures en
utilisant la masse de CO2 produite par kilomètre, par exemple 120g/km pour un
petit véhicule récent et performant. Mais il serait plus parlant de parler en volume
car le CO2 ne se trouve pas à l’état solide à la sortie des pots d’échappement.
Une mole de CO2 pèse 44 g et occupe 22,4 litres à l’état gazeux, ce qui signifie
qu’une voiture avec un indice de 176g/Km envoie 8,9 m3 de CO2 dans l’atmosphère
pour 100 Km parcourus, en ayant détruit le même volume d’oxygène.
L’essence que nous brûlons dans nos voitures n’est pas un corps chimique pur mais
un mélange de plusieurs dizaines de molécules dont l’une des plus représentatives
est l’octane. On a d’ailleurs longtemps apprécié la qualité d’une essence par son
indice d’octane.
C8H18 + 12,5 O2 8CO2 + 9H2O
Quand on brûle une mole d’isooctane de masse 114 g, on détruit 12,5 moles soit 280
litres d’oxygène et on rejette 8 moles de CO2 soit 179,2 litres et 162g d’eau (201,6Introduction 13 litres à l’état vapeur qui se condense rapidement). Ce sont ces volumes considérables de CO2 relâchés dans l’atmosphère qui ne peuvent plus être absorbés par les forêts ou dissous dans les océans qui produisent l’effet de serre entraînant le réchauffement climatique et sa suite de calamités. La sécurité Dans nos sociétés occidentales surprotégées, l’insécurité routière a longtemps été considérée comme le premier problème à résoudre. Il y a chaque année dans le monde environ 1,2 million de morts liés aux accidents de la route, mais là encore, ces morts ne sont pas distribués de manière homogène sur la population. Les pays riches comptabilisent moins de 120 000 décès par an soit moins de 10% des drames liés à l’insécurité routière alors qu’ils possèdent environ 60% du total des voitures. Le reste du monde subit 90% des accidents mortels. L’Inde à elle seule comptabilise plus de 220 000 morts par an. Pour résumer la situation de manière brutale : les pays riches ont les voitures et les pays pauvres ont les morts. Remarquons encore que tout accident n’a a priori que quatre causes possibles : le conducteur, le véhicule, l’infrastructure ou la rubrique « autre cause ». Or, plus de 95% des accidents mettent en cause la responsabilité du conducteur…. La conclusion à en tirer est simple : supprimons le conducteur et remplaçons « l’automobile » par un « robot mobile ». La congestion (ou son opposé la mobilité) La congestion résulte d’un déséquilibre en un lieu donné et à un moment donné entre l’offre et la demande de surface circulante. Pour résoudre un déséquilibre, il existe a priori deux solutions : augmenter l’un des facteurs ou diminuer l’autre. On peut augmenter la surface circulante en construisant des autoroutes, en élargissant les anciennes mais cette solution, qui a été abondamment utilisée depuis un demi-siècle, défigure nos villes et nos campagnes et n’est jamais parvenue à résoudre la congestion en milieu urbain. La construction massive de nouvelles routes a au contraire contribué à l’étalement urbain, ainsi qu’à l’augmentation des distances et des consommations d’énergie. En revanche, il est très simple par de nouvelles réglementations de diminuer la demande : il suffit par exemple de décider que les numéros impairs circuleront les jours impairs - et les pairs les autres jours. On aura ainsi divisé la demande par deux et éliminé les bouchons mais aussi restreint les libertés individuelles. Une autre solution consiste à agir sur la fiscalité en faisant payer l’usage de la chaussée en milieu urbain. Les technologies de localisation et de communication permettent de manière élégante et efficace de taxer l’usager en fonction du lieu et des heures de présence, son compte bancaire est débité en temps réel. C’est la version moderne de l’octroi des siècles passés. Notre propos est justement l’étude de l’impact des TIC sur les systèmes de transports, ce qui donne corps au concept de STI (Systèmes de Transports Intelligents). Depuis une vingtaine d’années, ce domaine d’activité s’est structuré au niveau international sous l’acronyme ITS pour Intelligent Transportation System.
14 Les systèmes de transport intelligents Chaque année depuis le premier congrès tenu à Paris en 1994, se tient l’ITS World Congress qui se déplace chaque année entre les USA (ITS America), l’Europe représentée par ERTICO et l’Asie (principalement ITS Japan). Cette manifestation rassemble entre 5000 et 7000 participants du monde entier pour partager les avancées scientifiques, technologiques ou sociétales du moment, découvrir en parcourant l’exposition les dernières innovations des constructeurs ou équipementiers et assister aux démonstrations de savoir-faire des industriels ou des laboratoires. Les congrès ITS ont eu lieu à New York (2008), à Stockholm (2009) et à Pusan (Corée) en 2010. Les pays avancés ont tous créé des associations de personnes physiques ou morales impliquées professionnellement dans ces sujets. En France, l’ATEC a été créée (http://www.atec-itsfrance.net/home.cfm ). Signalons aussi pour la France le dynamisme particulier du Conseil Général des Côtes d’Armor qui anime ITS Bretagne et organise un congrès biannuel. (http://www.itsbretagne.net/ ) Les TICs permettent d’accroître fortement la sécurité et de diminuer la congestion, ce que nous allons développer dans les prochains chapitres. Malheureusement, il nous faut admettre que les deux problèmes essentiels de l’énergie et de l’environnement ne peuvent être résolus par le déploiement des TICs même si ça et là des contributions peuvent être apportées.
CHAPITRE 1
LES NOUVELLES TECHNOLOGIES DANS LE VEHICULE
LES SYSTEMES DE NAVIGATION
Un système de navigation, encore appelé système de guidage ou navigateur,
comprend quatre éléments :
• Une carte numérique.
• Un logiciel de routage.
• Un système de géo-localisation automatique précis.
• Une interface homme-machine conviviale d’interrogation et de présentation
des résultats.
La cartographie numérique
On appelle SIG (Systèmes d’Informations Géographiques) l’ensemble des
techniques informatiques pour créer, mémoriser, manipuler les informations de
types cartographiques. Les SIG concernent la cartographie routière, mais aussi les
réseaux ferrés, réseaux électriques, réseaux d’eau, de gaz, d’égouts, les réseaux
fluviaux…. En quelques années, plusieurs sociétés se sont développées pour créer
ces bases de données gigantesques qui, outre la topologie des routes, contiennent les
noms de rues, l’emplacement des hôpitaux, hôtels, restaurants, musées, cinémas,
stades…
Le réseau routier français comprend un million de kilomètres de chaussées. Si on
place un point tous les deux cents mètres avec ses coordonnées (latitude, longitude
et altitude), cela fait quinze millions de données à stocker, ce qui est peu avec les
technologies de mémorisation disponibles aujourd’hui. On peut donc rajouter
d’innombrables informations écrites, visuelles ou sonores - la France tiendra
aisément sur un CDROM de 700 Mo.
Le réseau routier est en fait un gigantesque graphe dont les sommets sont les points
GPS et les arêtes les segments de route. Le routage est la recherche d’un chemin
optimal, au sens d’un critère, pour relier un point de départ à un point d’arrivée. Le
critère pourra être le chemin le plus court ou le plus rapide ou le plus économique.
Ce qui suppose que les différents segments du graphe soient connus avec leurs
longueurs, leurs capacités d’écoulement de trafic et le cas échéant leurs coûts de
péage.
Le chemin obtenu sera un routage qualifié de statique, c'est-à-dire que le chemin
retenu ne tiendra pas compte de la situation du trafic au moment où le déplacement
sera effectué.
Pour avoir un navigateur intelligent ou dynamique, il faut bien sûr disposer d’un
service de recueil de données trafic en temps réel de manière à modifier
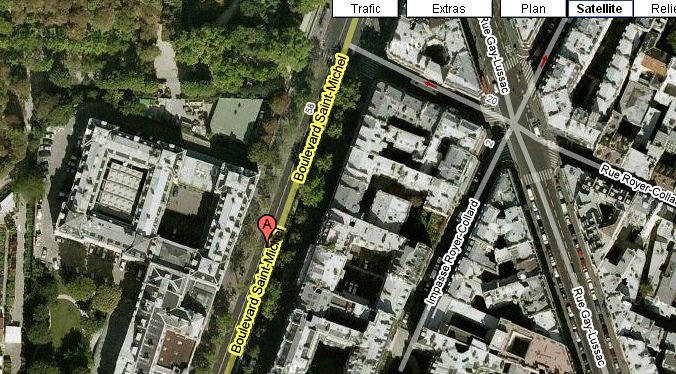
« l’impédance » des segments de route qui sont chargés en circulation.16 Les systèmes de transport intelligents Toutefois, pour obtenir un système de guidage, il faut disposer d’un capteur de localisation qui délivre en permanence la position du véhicule et la reporte sur la carte numérique. L’opération de report du point courant sur la carte numérique consiste à mettre en correspondance les données du capteur de localisation (longitude et latitude) et un point de la route qui est discrétisée avec un point tous les deux cents mètre par exemple. Cette opération s’appelle le « map matching » ou mise en correspondance. Le travail est facilité par le fait que le véhicule est a priori sur la route et que l’on connaît aussi son sens de déplacement. Même avec des capteurs GPS à bas coût, la localisation se fait à moins d’une dizaine de mètres. Les cartes numériques sont fournies en Europe principalement par deux sociétés : Navteq et Tele Atlas. Ces opérateurs sillonnent les routes avec des véhicules équipés de matériel informatique et de caméras vidéo pour relever les caractéristiques utiles comme les voies de circulation, la signalisation, les intersections. La couverture de la France atteint aujourd’hui 100 %. La numérisation totale du réseau routier, des grandes agglomérations et des villes moyennes avec plusieurs milliers de plans détaillés, rue par rue, constitue un travail colossal. Les modifications comme les sens interdits, les nouveaux noms de rues, les ronds-points et l’ouverture de nouvelles routes sont prises en compte dans les meilleurs délais. Il est d’ailleurs possible de faire remonter les erreurs en contactant directement les fournisseurs de cartes : Navteq avec Map Reporter et Tele Atlas avec Map Insight. Une solution « Open source » appelée OpenStreetMap constitue une alternative à la cartographie commerciale. http://www.openstreetmap.fr/ Openstreetmap est un projet destiné à réaliser une carte du monde, sous licence dite “libre”. Cela signifie que tout le monde est libre d'utiliser, d'améliorer, de distribuer ou d'effectuer des travaux dérivés à partir des cartes Openstreetmap. De nombreux opérateurs offrent sur le WEB des services utilisant la cartographie. Via Michelin par exemple reporte sur sa carte la météo en temps réel, la position des radars, l’état du trafic et bien sûr les restaurants, les hôtels. La préparation d’un voyage avec le routage personnalisé voiture, vélo, piétons et la recherche de parcours touristiques sont proposées. Google profite du succès de son navigateur pour proposer ses services autour de la cartographie « Googlemap ». Ci-après l’image satellite de l’Ecole des Mines de Paris puis l’entrée de l’école au 60 boulevard Saint Michel sur Googlemap.
Les nouvelles technologies dans le véhicule 17 Technologie de géo-localisation automatique Aussi loin que l’on remonte dans l’histoire de l’humanité, l'homme a cherché à voyager pour découvrir le monde. Cela l'a conduit à devoir se localiser sur la terre. Dans un premier temps, il a repéré son chemin grâce à sa mémoire visuelle, mais cette méthode limite son rayon de déplacement.
18 Les systèmes de transport intelligents L'invention de la boussole a été une découverte décisive, qui lui a permis de s'orienter et de se positionner sur des cartes. Les marins, les géologues et les aviateurs ont ainsi appris à faire le point. En reconnaissant trois points (les amers) dans son environnement, l'observateur peut mesurer au compas de relèvement trois angles par rapport au nord et ainsi se positionner au centre d'un triangle. La précision de cette méthode de positionnement est très bonne. Elle est toutefois liée à la précision des instruments de pointage. De plus, l'observateur doit détecter trois amers connus sur sa carte, ce qui n'est pas toujours possible et difficilement réalisable de manière automatisée. Pour des besoins militaires, les Etats-Unis ont développé dans les années 70 un système de localisation automatique précis d’un point quelconque de l’environnement terrestre. Pour cela, une myriade de 31 satellites a été lancée : elle sert d’amers repérables automatiquement. Le système qui s’est appelé « GPS » (Global Positioning System) exploite, lui aussi, le principe du « point optique » exposé précédemment. Avec retard, l’Europe s’est engagée à mettre en œuvre un système concurrent nommé Galileo. Conçu une trentaine d’années après le GPS, il apportera quelques progrès technologiques, mais le retard de son déploiement constitue un handicap important. Principe de fonctionnement du système GPS : Pour que les simples PDA (Personal Digital Assistant) que nous utilisons aujourd’hui puissent se localiser, une imposante technologie est déployée à l’échelle de la planète. Le système GPS comprend en effet un ensemble de satellites qui tournent autour de la terre, un ensemble de stations au sol et bien sûr les millions de récepteurs GPS passifs qui tirent les bénéfices de cette boussole électronique précise offerte à l’humanité tout entière par les Etats-Unis d’Amérique. Le segment spatial Il est constitué actuellement d'une constellation de 31 satellites (NAVSTAR pour NAVigation Satellite Timing And Ranging). Ces satellites sont répartis sur 6 orbites quasi circulaires d'inclinaison 55° par rapport à l’équateur, à une altitude d'environ 20.000 Km (période 11 heures 58 minutes 02 secondes). La configuration du réseau de satellites est conçue de manière à assurer à tout moment la réception au sol d’un maximum de signaux en provenance des satellites, surtout sur les parties habitées de la terre.
Les nouvelles technologies dans le véhicule 19
La constellation des satellites du GPS
Les stations de contrôle et de poursuite au sol :
Observant les satellites, ces stations au sol au nombre de 5, ont un triple rôle :
• Observer les dérives des satellites par rapport à leur orbite nominale (ces
dérives sont principalement dues à la pression de radiation solaire et aux chocs
avec des micrométéorites).
• Calculer le biais des horloges atomiques des satellites qui, malgré leur grande
stabilité, dérivent légèrement (de l'ordre de 0.1 ms par an) par rapport à
l'horloge de référence de l'observatoire de la NASA. (Rappelons que si
l'horloge d'un satellite est fausse de 0.1 ms, la mesure de distance est fausse de
30 km ! Alors que la précision requise est de l'ordre de 50 m ! )
• Mettre à jour, à partir de relevés atmosphériques, les coefficients du modèle
des couches ionosphériques et troposphériques de l'atmosphère, utilisés par le
récepteur pour le calcul de la distance à partir du temps de propagation.
Ces trois informations (paramètres orbitaux, biais de l'horloge du satellite,
coefficients atmosphériques) sont périodiquement réactualisées (toutes les 30 s) et
transmises aux satellites qui les réémettent vers les récepteurs dans le message de
navigation.
Les récepteurs
Ils sont constitués d'un récepteur radio, d'une horloge et d'un processeur.
Un récepteur G.P.S. se positionne en mesurant les distances qui le séparent des
satellites. En théorie, trois satellites suffisent pour calculer ses trois coordonnées. En
réalité, comme les distances sont calculées à partir de la mesure des temps de
propagation satellites récepteur et que ces temps ne sont mesurés qu’à une inconnue
près (le biais de l’horloge du récepteur par rapport aux horloges des satellites) il faut
un quatrième satellite.20 Les systèmes de transport intelligents
L’utilisateur cherche donc à déterminer 4 inconnues : sa position (trois coordonnées
x, y, z) et le biais de son horloge (τ). Il a donc besoin de signaux provenant d’au
moins 4 satellites.
De façon schématique, on peut dire que chaque satellite émet deux types de
signaux : un « top » (toutes les millisecondes) qui est utilisé pour la mesure de
distance et un « message de navigation » (toutes les 30 secondes) contenant les
paramètres orbitaux du satellite.
Supposons qu’un satellite Si émette un “top” à une heure t1 :
• ce signal parvient au récepteur R à une heure t2,
• la distance satellite récepteur est d (Si, R) = c.(t2-t1), avec c la vitesse de la
lumière.
• Or, l’horloge du récepteur étant biaisée, l’heure de réception mesurée est (t2-
τ),
• la distance mesurée est di = d (Si, R) + c. τ
La distance di = d(Si, R) + c. τ est appelée « pseudo-distance ».
Distance et pseudo-distance satellite récepteur
Le récepteur doit donc résoudre le système suivant :
x, y, z et τ sont les inconnues.Les nouvelles technologies dans le véhicule 21 (xi, yi, zi) est la position du satellite Si, connue grâce au message de navigation. d1,...d4 sont les pseudo-distances mesurées par le récepteur. Ce qui a été exposé ci-dessus correspond au mode 3D. Il existe un autre mode, dit mode 2D, où le récepteur ne cherche à calculer que 3 inconnues (x, y et τ). L'altitude z est fournie par l'utilisateur (par défaut, c'est l'altitude du dernier point en mode 3D). En mode 2D, trois satellites suffisent pour faire un point. Ce mode est utilisé en mer ou sur terre, lorsque l'on dispose d'un modèle numérique de terrain. On peut résumer la chaîne G.P.S par le schéma suivant : Le GPS différentiel (DGPS) et le RTK (Real Time Kinematic, en anglais) Le but du GPS différentiel est d'accroître la précision du positionnement, en réduisant fortement les erreurs sur la mesure des distances satellites - récepteur. Le DGPS est basé sur un ensemble de stations fixes, dont les positions sont connues exactement. Ces stations reçoivent les signaux des mêmes satellites que les terminaux mobiles présents dans leur zone d'action, et elles estiment en permanence l'erreur locale de positionnement du GPS en comparant la position calculée avec leur position réelle connue. Cette information est transmise par radio ou tout autre moyen aux récepteurs DGPS de la zone couverte. Une correction différentielle est définie pour un satellite donné à un temps donné. On peut ainsi passer d'une précision de l'ordre de 10 à 20 mètres à une précision de 5 à 3 mètres sur une grande zone (plusieurs centaines de kilomètres). Le mode « différentiel » existe en plusieurs variantes ; la plus élaborée utilise la mesure de la phase des signaux reçus (GPS RTK) et non le code binaire pour calculer les pseudo-distances. À partir d'une station située sur un point connu distant de quelques kilomètres, on obtient ainsi à l'aide du GPS des positions précises à
22 Les systèmes de transport intelligents quelques centimètres près dans les trois dimensions (GPS géodésique ou cinématique), ce qui permet de l'utiliser non seulement pour des levers, mais aussi pour des implantations en topographie. On peut même atteindre quelques millimètres de précision avec des logiciels de traitement très élaborés utilisés en temps différé. Pour bénéficier des performances du DGPS, il faut à la fois un récepteur compatible et, très souvent, s’abonner à un opérateur de service. Pour le GPS RTK, il faut disposer d’un récepteur performant et d’une station de base au sol. Le navigateur embarqué et son interface homme-machine L’adaptation des navigateurs au guidage routier et leur industrialisation ont eu lieu à partir des années 1990, d’abord au Japon, puis aux USA et en Europe. On a pensé que les navigateurs seraient un marché réservé aux constructeurs automobiles mais ceux-ci ont tardé à les mettre à disposition en première monte et ont appliqué des prix trop élevés. Des navigateurs nomades sont apparus et le marché a explosé sur les cinq dernières années. Ce sont des millions de navigateurs qui ont été mis en service en Europe et en France. Les principaux arguments avancés par les constructeurs automobiles pour justifier la supériorité des navigateurs embarqués par rapport aux systèmes nomades concernent la précision du positionnement et la qualité de l’interface homme-machine intégrée au tableau de bord. Il est exact que dans les tunnels ou encore dans les rues au milieu des bâtiments de grande dimension (on parle de « canyons urbains »), les
Les nouvelles technologies dans le véhicule 23
signaux GPS et la localisation peuvent disparaître temporairement. Dès lors, les
systèmes embarqués hybrident les signaux GPS avec des informations odométriques
collectés sur le bus CAN pour assurer la persistance de la localisation GPS. Cet
avantage ne suffit toutefois pas à justifier aux yeux des automobilistes la différence
de coût. L’intégration d’un écran couleur avec la radio, un lecteur de DVD et le
téléphone offre confort et prestige au navigateur embarqué, mais les navigateurs
nomades ont rapidement intégré toutes ces fonctionnalités.
La véritable revanche des systèmes embarqués viendra du couplage du GPS avec
des organes de sécurité ou de confort du véhicule. Par exemple, le navigateur peut
servir « d’ange gardien » pour respecter automatiquement les limites de vitesse
grâce au couplage avec le régulateur de vitesse, ou encore contribuer à l’éco-
conduite en prenant en compte le profil de la route.
Dans la langue française, les expressions « navigateur nomade » ou « système de
guidage électronique » sont de moins en moins usitées et l’acronyme GPS est
devenu leur synonyme. Le GPS est entré dans le domaine du public. Il est devenu
un objet banalisé et ses applications se sont multipliées. Il équipe les voiliers, les
avions, les vélos et même les randonneurs avec, à chaque fois, des cartes
numériques dédiées.
Le phénomène s’est encore accéléré avec la pénétration massive des téléphones
portables de nouvelle génération intégrant la cartographie, l’antenne GPS, son
processeur et le guidage routier, piétonnier, ouvrant la porte à la mobilité
multimodale.
Une nouvelle industrie s’est développée et de nouveaux acteurs apparaissent très
vite. L’édition des cartes numériques s’est structurée autour de grands acteurs tels
que Navteq et Tele Atlas. Le marché des navigateurs portables a été accaparé par
TomTom, Garmin, Mio. Plus de trois millions de GPS portables ont été vendus en
France en 2008.
Système de navigation embarqué Un navigateur GPS portable Une grande variété de PDA
connecté au bus CAN pour un typique (Personal Digital Assistant)
positionnement précis incluant des navigateurs
GPS
Puis les géants de l’informatique Google et Microsoft se sont respectivement
positionnés avec des logiciels applications puissants tels que Google Earth et Virtual
Earth 3D (Microsoft). De grandes manœuvres industrielles ont eu lieu ces deux24 Les systèmes de transport intelligents dernières années avec le rachat de TeleAtlas par TomTom et de Navteq par Nokia. Le marché de la mobilité est en effervescence. Conclusion sur les navigateurs Le service rendu à l’utilisateur est tout à fait réel et ne dépend pas des autres usagers. L’automobiliste tire un bénéfice immédiat et tangible de son investissement. Beaucoup d’automobilistes achètent le système pour être informés de la position des radars et des dépassements de vitesse. Même si le fonctionnement du système de navigation est simple et bien compris, son usage garde un côté merveilleux tant l’usager a l’illusion d’une machine intelligente qui l’assiste. Si l’utilisateur s’est écarté du chemin préconisé, il peut à tout moment redemander un calcul de chemin à partir de la position courante. De la même façon, l’utilisateur peut à tout moment rechercher autour de sa position courante un service, une station essence ou un hôtel par exemple. Il choisit parmi les propositions du logiciel celle qui lui convient et peut contacter l’établissement choisi par téléphone en utilisant la liaison à la base de données et la communication GSM. Les navigateurs sont fiables et précis. Les seuls dysfonctionnements peuvent provenir de la perte des satellites ou d’une base de données incomplète ou non à jour. Les cartes numériques doivent donc être mises à jour périodiquement pour prendre en compte les nouvelles voies, les nouveaux lotissements, les modifications topologiques de carrefour, les modifications de la signalétique routière. Les opérateurs de cartes numériques offrent ces services (y compris la mise à jour des emplacements des radars fixes) par téléchargement sur Internet, moyennant des abonnements. Pour les autres usagers, la possession par un automobiliste d’un système de navigation ne présente aucun avantage ni aucune nuisance. Une des limites du système actuel est que, pour l’usager lui-même, le système n’exploite que des informations statiques et ne tient pas compte du trafic et des éventuels embouteillages. L’utilisation d’informations contextuelles sur l’état du trafic par le navigateur conduit au concept de navigateur dynamique en temps réel. Cela suppose que le navigateur soit alimenté en temps réel par des données sur l’état du trafic. Le recueil de ces données a un coût, et on pressent, là encore, une économie de l’information trafic en émergence. Une autre amélioration possible des systèmes actuels de navigation consiste en des fonctions de copilotage. En effet, le navigateur par GPS, tel que nous le connaissons, est parfaitement opérationnel et permet un guidage performant.
Les nouvelles technologies dans le véhicule 25 Son assistance représente un confort et un gain de temps pour l’usager, mais il contribue également à la sécurité car le conducteur n’a pas à chercher sa route, à s’arrêter sur le bas-côté pour prendre des renseignements sur une carte papier en perturbant le trafic. Mais le guidage actuel ne représente qu’un avant-goût des possibilités offertes par le système GPS. En effet, un développement prometteur consiste à exploiter la lecture anticipée de la route, afin d’annoncer au conducteur des éléments à venir qui lui sont invisibles au point courant, à la manière d’un copilote en rallye. On parle alors d’ « horizon électronique ». Pour ce faire, les futures cartes numériques du réseau routier vont s’enrichir de nouveaux attributs comme les points « accidentogènes », les montées et les descentes, les indices d’adhérence de la chaussée, les virages en épingles avec leur courbure, les carrefours dangereux, les panneaux stop, les limitations de vitesses etc. Ces informations pourront être fusionnées pour être présentées au conducteur sous forme d’une « signalétique embarquée ». De la même façon, les opérateurs de réseaux autoroutiers pourront multiplier les panneaux à messages variables (PMV) en les géo-localisant et en les diffusant sous forme de PMV embarqués. CONTROLE LONGITUDINAL DU VEHICULE La conduite d’un véhicule comprend deux fonctions principales : le contrôle longitudinal qui consiste à maintenir une vitesse compatible avec la géométrie et la qualité de la route, les conditions météorologiques et l’état du trafic en assurant la distance de sécurité avec les véhicules précédents, et le contrôle latéral qui consiste à maintenir le véhicule sur sa voie. Les actionneurs disponibles pour assurer le contrôle longitudinal sont l’accélérateur et le frein alors que l’actionneur utilisé pour assurer le contrôle latéral est le volant. Le contrôle longitudinal est un contrôle en vitesse et la consigne de vitesse est normalement donnée par le conducteur. Celui-ci est soumis à de multiples contraintes que sont les caractéristiques de son véhicule, le respect des limites de vitesse, et ses propres qualités de conducteur. Le régulateur de vitesse Le régulateur de vitesse classique (en anglais Cruise controler) compare la vitesse réelle du véhicule à une vitesse de croisière choisie par l’usager, il accélère pour atteindre cette vitesse et utilise le frein moteur en cas de dépassement de la consigne, mais ne fait pas usage du frein. Ce système est pratique sur de longues distances, notamment sur autoroute et permet généralement une consommation optimale de carburant. Il permet aussi d'éviter les excès de vitesse par inadvertance. Le régulateur est utilisé au-dessus d’une vitesse minimale de l’ordre de 70 Km/h. Il ne faut pas l’utiliser en milieu urbain ou si la circulation est chargée et irrégulière. Ce système effectue seul les corrections du régime moteur en fonction du profil de la route, accélérant dans les montées et ralentissant en faisant usage du frein moteur
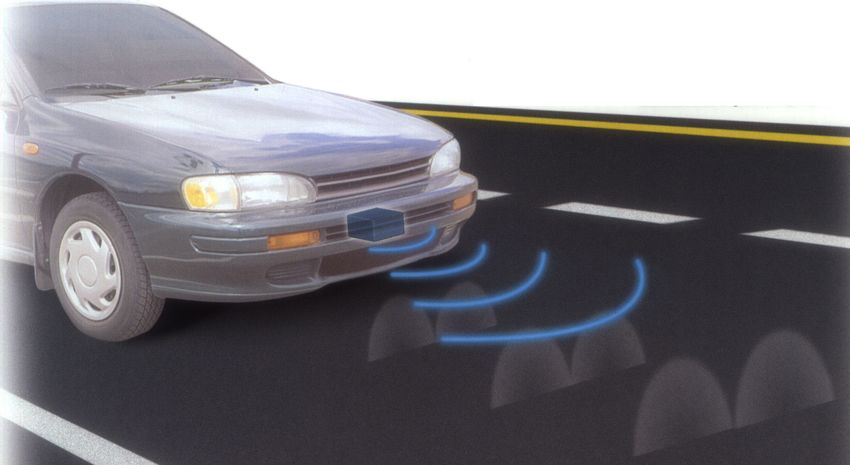
26 Les systèmes de transport intelligents dans les descentes. Dans la mesure où ceci serait insuffisant par dépassement des limites du système, il faut, bien entendu, rétrograder sur le rapport inférieur et, le cas échéant, freiner par les moyens classiques. Le conducteur dispose d'une ou plusieurs commandes, de préférence au volant sur une seule manette, lui permettant d'activer le régulateur, de choisir sa vitesse de croisière, et de revenir au mode classique. Différentes fonctions peuvent être ajoutées, comme le retour en mode régulation après un passage en mode classique, le choix du mode limiteur plutôt que régulateur, par exemple. Les véhicules les plus récents n'ayant plus de câble d'accélérateur, c'est le micromoteur de commande des gaz qui est directement commandé par le calculateur du véhicule. La conduite sous régulateur de vitesse ne présente pas de difficultés particulières. De nombreuses sécurités sont couplées à ce système : ainsi, une action sur la pédale de freins, d'accélérateur, d'embrayage (pour les boîtes de vitesses manuelles) ou sur le levier de sélection des vitesses, désactive immédiatement le régulateur et fait repasser le véhicule en mode de conduite traditionnel. Le conducteur libéré de la hantise du dépassement des vitesses limites autorisées peut reporter son attention autrefois dévolue à cette tâche aux autres aspects de la conduite automobile, et adopter une conduite plus détendue. Le régulateur de vitesse constitue donc un progrès dans le domaine de la sécurité. Le régulateur est présent sur la quasi-totalité des voitures aux USA et sa pénétration sur les marchés européens a été plus tardive. Le Régulateur de vitesse adaptatif (RVA en français ou ACC en anglais) Le Régulateur de Vitesse Adaptatif (en anglais A.C.C. pour « Autonomous Cruise Control ») est un système d’assistance capable de contrôler la vitesse relative ainsi que la distance entre deux véhicules qui se suivent sur la même voie. Si un véhicule équipé d’un régulateur de vitesse classique réglé à 130km/h sur autoroute, rattrape un véhicule roulant à 110 Km/h, il le percute à une vitesse relative de 20km/h en l’absence d’intervention du conducteur. Au contraire, le Régulateur de Vitesse Adaptatif détecte le véhicule plus lent, calcule automatiquement la distance de sécurité, ralentit et se maintient à la vitesse du véhicule plus lent dans l’attente d’une intervention du conducteur. Le Régulateur de Vitesse Adaptatif ne communique ni avec le véhicule suivi ni avec l'infrastructure. C’est un système d’assistance autonome qui procure un bénéfice immédiat à son propriétaire. Le composant critique du Régulateur de Vitesse Adaptatif est le capteur de détection du véhicule rattrapé. Deux solutions technologiques sont en compétition : le radar et le lidar. Ces solutions diffèrent en prix et en performance, mais ont des ressemblances au niveau technique. Le radar utilise des ondes millimétriques (3,89
Vous pouvez aussi lire