Électronique et Informatique industrielle " Platine Arduino " - ATMEGA 328P µcontrôleur Atmel - Université de la Nouvelle ...
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Électronique et Informatique industrielle
« Platine Arduino »
µcontrôleur Atmel
Carte Arduino Uno WiFi
ATMEGA 328P
L2 Informatique - 2018 Thomas Quiniou 1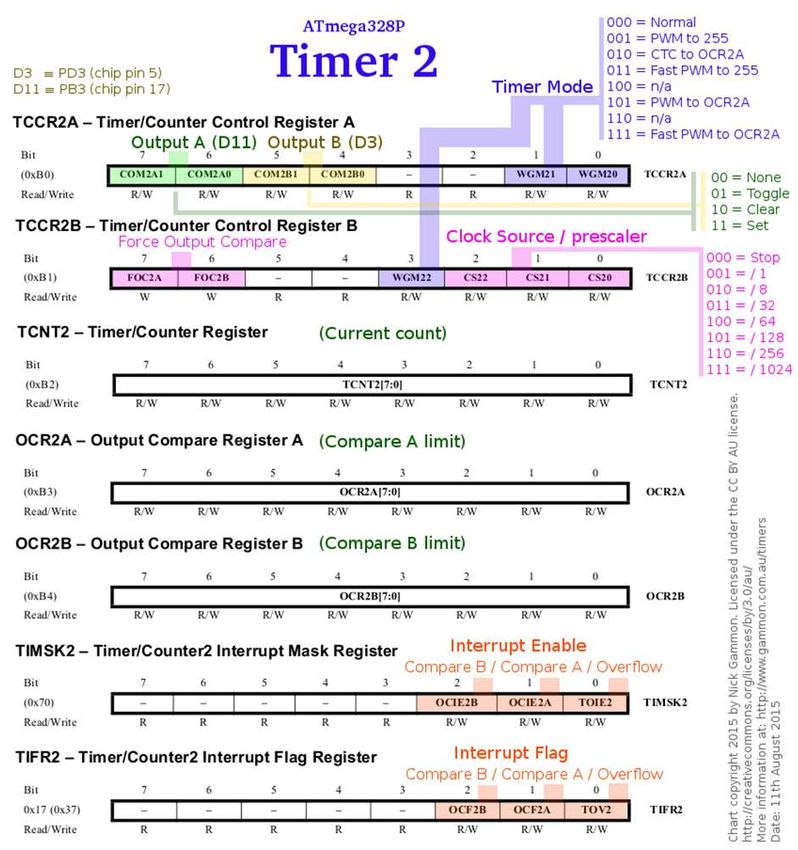
Électronique et Informatique industrielle Quelques liens « Platine Arduino » Arduino et Atmega : https://www.arduino.cc/ https://www.arduino.cc/en/Guide/ArduinoUnoWiFi#toc10 https://store.arduino.cc/arduino-uno-wifi http://www.microchip.com/design-centers/8-bit http://www.microchip.com/wwwproducts/en/ATmega328P Sites en ligne, quelques exemples mais il en existe bien d’autres… : https://fr.flossmanuals.net/arduino http://perso-laris.univ-angers.fr/~cottenceau/ArduinoCottenceau2016.pdf https://www.tutorialspoint.com/arduino/index.htm http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.Debuter http://www.locoduino.org/ Gotronic, Uno wifi et Kit 40 capteurs https://www.gotronic.fr/art-carte-arduino-uno-wifi-25350.htm#complte_desc https://www.gotronic.fr/art-kit-de-40-capteurs-sen-x40-25414.htm L2 Informatique - 2018 Thomas Quiniou 2
Plan
• Présentation générale des µcontrôleurs et de leurs usages
• La platine Arduino :
– Historique du projet
– Installation et prise en main rapide
– Les différentes platines Arduino (UNO, MEGA, PRO MINI etc)
– Shields pour Arduino
– Le matériel à votre disposition (kit 40 capteurs Arduino)
• Programmation Arduino
– IDE Arduino, structure d’un programme
– Syntaxe, nommage, déclaration, indentation, commentaires, sous-routines etc.
• Le µcontrôleur ATMEGA328P, architecture
• Électronique :
– Quelques bases indispensables en électronique
– Les entrées/sorties numériques, les entrées analogiques, les bus : exemples
• Les timers et interruptions
L2 Informatique - 2018 Thomas Quiniou 3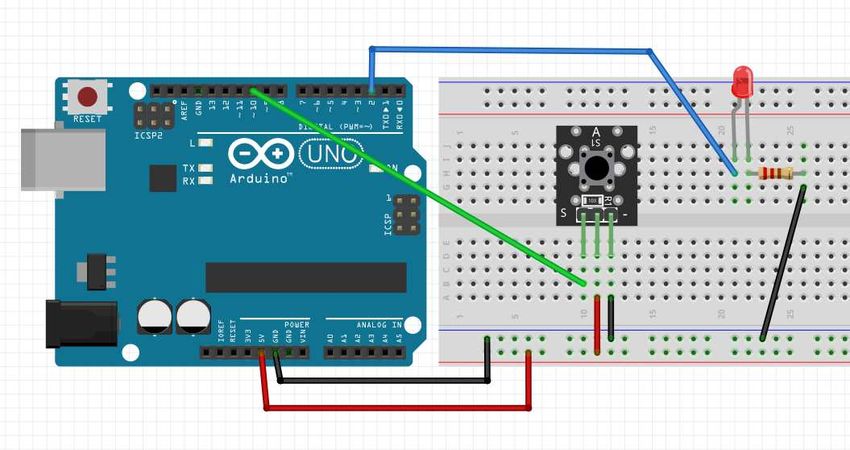
Présentation générale des µcontrôleurs et de
leurs usages
Les microcontrôleurs
Un microcontrôleur est un circuit intégré rassemblant dans un même boitier un
microprocesseur (généralement peu puissant), plusieurs types de mémoires et
des périphériques de communication (Entrées-Sorties).
Les microcontrôleurs représentent la plus grosse partie
des ventes dans le marché des microprocesseur. En effet,
un foyer moyen d'un pays développé est susceptible
d'être équipé de seulement un ou deux microprocesseurs
généralistes (ordinateurs), mais d'une ou deux douzaines
de microcontrôleurs (appareils électroménagers).
Les microcontrôleurs sont des composants microprogrammés. Plusieurs
langage sont utilisés : assembleur (bas niveau), Basic, langage C et plus
récemment C++.
L2 Informatique - 2018 Thomas Quiniou 4
Présentation générale des µcontrôleurs et de
leurs usages
Un microcontrôleur (µC) se présente sous la forme d’un circuit intégré réunissant tous
les éléments d’une structure à base de microprocesseur. Voici généralement ce que
l’on trouve à l’intérieur d’un tel composant :
• un microprocesseur (C.P.U.), avec une largeur du chemin de données allant de
4 bits pour les modèles les plus basiques à 32 ou 64 bits pour les modèles les
plus évolués,
• de la mémoire vive (RAM, EEPROM) pour stocker les données et variables,
• de la mémoire morte (ROM) pour stocker les programmes, différentes
technologies EPROM, EEPROM, flash,
• souvent un oscillateur pour le cadencement. Il peut être réalisé avec un
quartz, un circuit RC ou encore une PLL,
• des périphériques, capables d'effectuer des tâches spécifiques.
L2 Informatique - 2018 Thomas Quiniou 5
Présentation générale des µcontrôleurs et de
leurs usages
Parmi les périphériques, on peut mentionner entre autre :
• les convertisseurs analogiques-numériques (CAN) (donnent un nombre binaire
à partir d'une tension électrique),
• les convertisseurs numériques-analogiques (CNA) (effectuent l'opération
inverse),
• les générateurs de signaux à modulation de largeur d'impulsion (MLI, ou en
anglais, PWM pour Pulse Width Modulation),
• les timers/compteurs (compteurs d'impulsions d'horloge interne ou
d'événements externes),
• les chiens de garde (watchdog),
• les comparateurs (comparent deux tensions électriques),
• les contrôleurs de bus de communication (UART, I²C, SSP, CAN, FlexRay,
USB, Ethernet, etc.).
L2 Informatique - 2018 Thomas Quiniou 6
Présentation générale des µcontrôleurs et de
leurs usages
Un microcontrôleur est donc une unité de traitement de l’information de type
microprocesseur à laquelle on a ajouté des périphériques internes permettant de
réaliser des montages sans nécessiter l’ajout de composants externes.
Plusieurs constructeurs se partagent le marché des microcontrôleurs, citons INTEL,
MOTOROLA, SEAGATE-THOMSON, ATMEL, ZILOG, PHILIPS et enfin MICROCHIP
avec ses PICs très populaires.
Les µC sont basés sur 2 architectures
possibles, Von Neumann (INTEL80XX,
Motorola HC05, HC08 et HC11, ou ZILOG
Z80) ou Harvard (PIC, ATMEL).
EXEMPLES DE MICROCONTRÔLEURS
L2 Informatique - 2018 Thomas Quiniou 7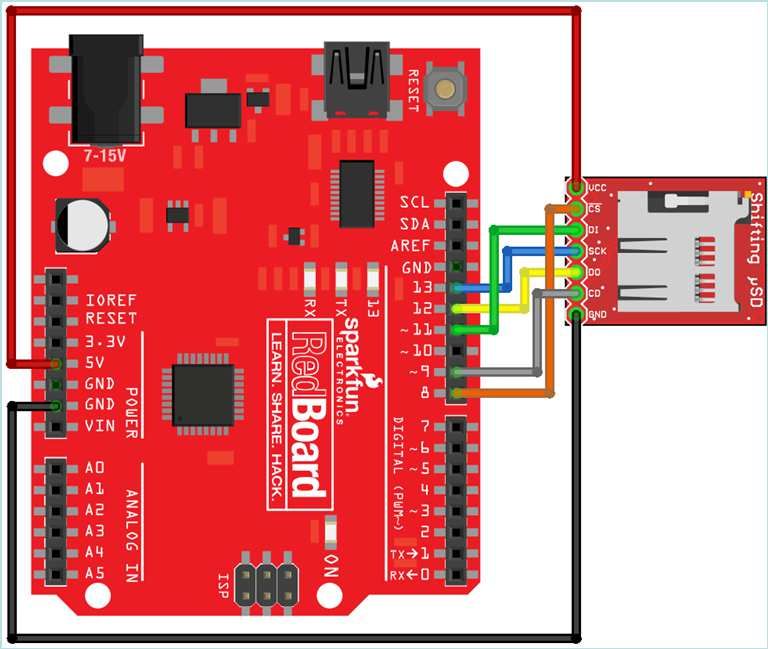
Présentation générale des µcontrôleurs et de
leurs usages
De nombreux microprocesseurs et microcontrôleurs actuels utilisent une architecture
interne dite de Von Neumann, c’est-à-dire en fait une architecture commune à celle
que l’on rencontre habituellement dans les micro-ordinateurs. La mémoire, appelée
improprement de programme, contient en fait des instructions et des données placées
à la suite les unes des autres et l’on ne dispose que d’un bus, appelé bus de données,
pour véhiculer tour à tour les codes des instructions et les données qui leur sont
associées comme le montre la suivante.
Architecture « Von Neumann »
L2 Informatique - 2018 Thomas Quiniou 8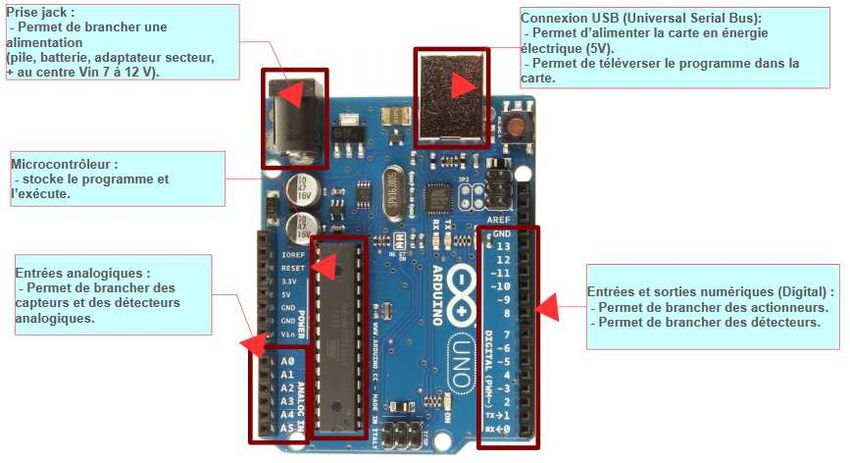
Présentation générale des µcontrôleurs et de
leurs usages
Si cette architecture donne toute satisfaction comme vous en avez la preuve
éclatante chaque jour, elle pose quelques problèmes dès que l’on veut faire
fonctionner l’ensemble rapidement. En effet, l’exécution d’une seule instruction
nécessite plusieurs échanges de données sur le seul et unique bus dévolu à cet usage
puisqu’il faut tout d’abord aller chercher le code de l’instruction puis la ou les données
qu’elle doit manipuler.
Il est alors préférable de faire appel à une architecture dite Harvard dans laquelle
les instructions et les données sont clairement différenciées et sont véhiculées sur
des bus différents. Vu de l’utilisateur, cela ne change rien bien sûr et les circuits de
ce type s’utilisent exactement comme les autres. En revanche, les résultats obtenus,
en termes de vitesse d’exécution des programmes, peuvent être impressionnants.
L2 Informatique - 2018 Thomas Quiniou 9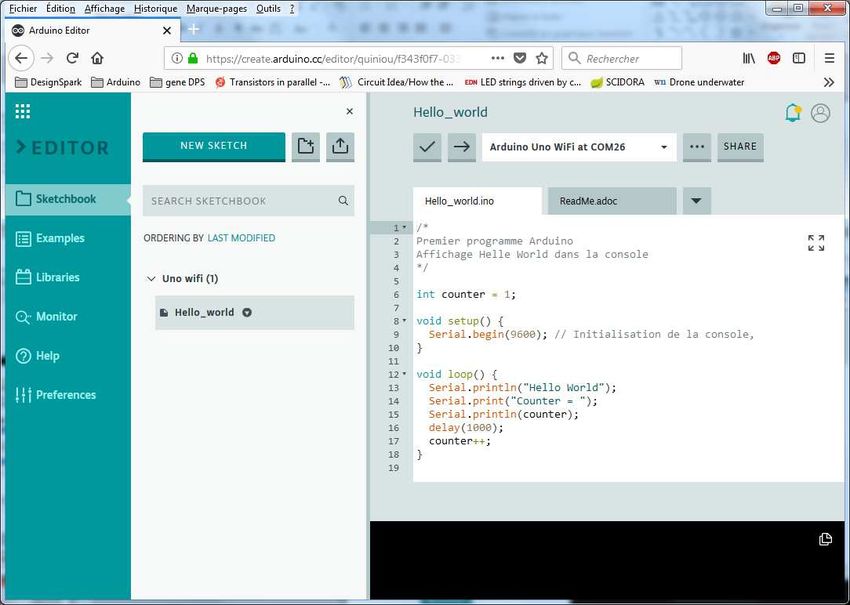
Présentation générale des µcontrôleurs et de
leurs usages
En effet, l’exécution d’une instruction ne fait plus appel qu’à un seul cycle machine
puisque l’on peut simultanément, grâce aux deux bus, rechercher le code de
l’instruction et la ou les données qu’elle manipule.
Architecture « Harvard »
Rompant avec une tradition bien établie, les microcontrôleurs PIC de Microchip,
toutes familles confondues, ou AVR d’Atmel utilisent une architecture Harvard mais
ce n’est pas tout…
L2 Informatique - 2018 Thomas Quiniou 10Présentation générale des µcontrôleurs et de
leurs usages
MICROPROCESSEURS RISC ET CISC
Les microprocesseurs CISC (Complex Instruction Set Computing) sont dotés d’un jeu
étendu d’instructions complexes. Ces instructions sont relativement lentes. Les
microprocesseurs CISC privilégient la puissance de traitement au détriment de la
rapidité.
Les microprocesseurs RISC (Reduced Instruction Set Computing) sont munis d’un jeu
réduit d’instructions simples (75 pour les PIC 18F, 131 pour l’ATmega328P). Ces
instructions sont adaptées et sont très rapides. Le microcontrôleur ATMEL
ATmega328P équipant la carte Arduino Uno est de type RISC.
⇒ ATMEL AVR : architecture Harvard + RISC (R)
Remarque : le R du sigle AVR vient de la première lettre du terme RISC. Pour les deux autres lettres, plusieurs
versions existent : AdVanced [Risc], Advanced Virtual [Risc] ou encore Alf and Vegard [Risc] (les designers de la
première puce). Néanmoins et selon Atmel, ces 2 lettres ne veulent rien dire en particulier.
L2 Informatique - 2018 Thomas Quiniou 11Présentation générale des µcontrôleurs et de
leurs usages
Langage de programmation des µP
Les programmes peuvent être écrits à trois niveaux différents :
– Langage évolué (Pascal, Basic, Langage C, etc),
– Assembleur (mnémoniques et opérandes),
– Langage machine (binaire ou hexadécimal).
Le programme binaire est transféré dans une mémoire non volatile du µcontrôleur.
L2 Informatique - 2018 Thomas Quiniou 12La platine Arduino
Historique du projet (https://fr.flossmanuals.net/arduino/historique-du-projet-arduino/)
• Projet issu d'une équipe d'enseignants et d'étudiants de l'école de Design d'Interaction
d'Ivrea 1 (IDII, Italie).
• Problème : avant la période 2003-2004, les outils nécessaires à la création de projets
d'interactivité étaient complexes et onéreux. Ces coûts souvent trop élevés rendaient
difficiles le développement par les étudiants de nombreux projets et ceci ralentissait la mise
en œuvre concrète de leur apprentissage.
• Jusqu'alors, les outils de prototypage étaient principalement dédiés à l'ingénierie, à la
robotique et aux domaines techniques. Ils sont puissants mais leurs processus de
développement sont longs et ils sont difficiles à apprendre et à utiliser pour les artistes, les
designers d'interactions et, plus généralement, pour les débutants.
• Leur préoccupation se concentra alors sur la réalisation d'un matériel moins cher et plus facile
à utiliser. Ils souhaitaient créer un environnement proche de Processing, ce langage de
programmation développé dès 2001 par Casey Reas et Ben Fry, deux anciens étudiants de John
Maeda au M.I.T., lui-même initiateur du projet DBN.
L2 Informatique - 2018 Thomas Quiniou 13La platine Arduino
Historique du projet, suite (https://fr.flossmanuals.net/arduino/historique-du-projet-arduino/)
• En 2003, Hernando Barragan, pour sa thèse de fin d'études, avait entrepris le développement
d'une carte électronique dénommée Wiring, accompagnée d'un environnement de
programmation libre et ouvert (voir le lien https://arduinohistory.github.io/).
• Comme pour Wiring, l'objectif du projet Arduino (2005) était d'arriver à un dispositif simple à
utiliser, dont les coûts seraient peu élevés, les codes et les plans « libres » (c'est-à-dire dont
les sources sont ouvertes et peuvent être modifiées, améliorées, distribuées par les
utilisateurs eux-mêmes) et, enfin, « multi-plates-formes » (indépendant du système
d'exploitation utilisé).
• Le nom Arduino trouve son origine dans le nom du bar dans lequel l’équipe avait l'habitude de se
retrouver. Arduino est aussi le nom d'un roi italien, personnage historique de la ville « Arduin
d’Ivrée », ou encore un prénom italien masculin qui signifie « l'ami fort ».
L2 Informatique - 2018 Thomas Quiniou 14Les différentes platines « Officielles » Arduino
https://www.arduino.cc/en/Main/Products?from=Main.GenuinoProducts
https://www.arduino.cc/en/Products/Compare
UNO (20€) MEGA 2560 (40€) PRO MINI (16€)
L2 Informatique - 2018 Thomas Quiniou 15Les Shields Arduino
http://shieldlist.org/
Les shields permettent d’ajouter des fonctionnalités à la carte
Arduino : vidéo, son, réseau (WiFi, GSM etc.), connecteur, capteurs
etc. Il est possible d’en mettre plusieurs et de les empiler les unes
sur les autres.
Quelques exemples :
RTC/SD GSM/GPRS Multi-Camera
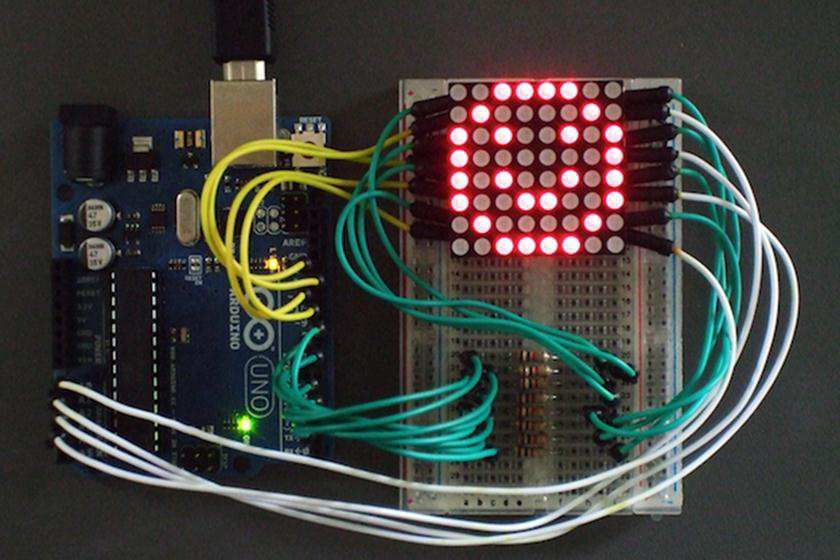
L2 Informatique - 2018 Thomas Quiniou 16Exemples de projets https://create.arduino.cc/projecthub Les cartes Arduino ayant été conçues avec l’objectif d’être facile d’accès, il n’est pas nécessaire d’être électronicien ou informaticien pour les mettre en œuvre. Du coup, les exemples de projets et les applications sont extrêmement nombreux et variés (robotique, station météo, domotique, jeu de lumière etc.) et de complexité plus ou moins importante. Robot Station météo Jeu de LEDs L2 Informatique - 2018 Thomas Quiniou 17
Liste du matériel à votre disposition
(Merci d’en prendre soin!)
Une carte Arduino WiFi Une plaque de prototypage (BreadBoard), des fils de
connexion, des résistances et un cordon USB
Une module RTC (Real Time Clock)
https://www.gotronic.fr/art-carte-arduino-uno-wifi-25350.htm
https://www.gotronic.fr/art-module-horloge-temps-reel-ada3295-25537.htm
Kit de 40 capteurs SEN-X40 https://github.com/adafruit/RTClib
Un lecteur de carte µSD
https://www.gotronic.fr/art-module-carte-
micro-sd-dev-13743-24810.htm
Un afficheur LCD 2X16
https://www.gotronic.fr/art-afficheur-lcd-2x16-i2c-ld1602i2c-25386.htm
https://www.arduinolibraries.info/libraries/liquid-crystal-i2-c
Un adaptateur secteur AC/DC réglable
https://www.gotronic.fr/art-adaptateur-psu10rs-
https://www.gotronic.fr/art-kit-de-40-capteurs-sen-x40-25414.htm 8143.htm
https://drive.google.com/file/d/0BxFOZP_yVG0lTE16cVVNQ1c3WVk/view
L2 Informatique - 2018 Thomas Quiniou 18La platine Arduino UNO L2 Informatique - 2018 Thomas Quiniou 19
La platine Arduino UNO
Bouton Reset
Connecteur ICSP (Programmation du µcontrôleur
sans passer par l’USB)
L2 Informatique - 2018 Thomas Quiniou 20IDE Arduino Installation et prise en main rapide L‘IDE Arduino permet de créer et d’éditer un programme (appelé sketch) qui sera compilé puis téléversé sur la carte Arduino. Ainsi, lorsque vous apportez des changements sur le code, ces changements ne seront effectifs qu'une fois le programme téléversé sur la carte. L’IDE peut être téléchargé gratuitement sur votre machine ou mis en œuvre directement en ligne. Rendez vous sur le site Arduino à l’adresse https://www.arduino.cc/ et cliquez sur le bouton software. Dans le cadre de ce cours, nous allons utiliser la version en ligne « ARDUINO WEB EDITOR ». Créer un compte, connectez vous et rendez vous sur la page web de l’IDE. (https://create.arduino.cc/projecthub/Arduino_Genuino/getting-started-with-arduino-web-editor-on-various-platforms-4b3e4a) L2 Informatique - 2018 Thomas Quiniou 21
L ’Editeur WEB Arduino Pourquoi l’éditeur web Arduino? (https://wiki.electroniciens.cnrs.fr/index.php/Arduino_Web_Editor) L'Arduino Web Editor sera toujours à jour, y compris les dernières bibliothèques et les "Cores" (support pour différentes cartes), sans avoir à installer quoi que ce soit. Les différentes cartes sont automatiquement disponibles depuis un seul menu déroulant. Des exemples sont présentés avec les détails Schematics et Layout. Vous pouvez également ajouter des PNG personnalisés à vos propres croquis, de sorte que tous les éléments essentiels de votre projet soient en un seul endroit. Vous pouvez également importer tout votre carnet de croquis (programme Arduino) et partager tout esquisse que vous faites sur l'éditeur Web en partageant simplement son URL. Licence SPI2 - 2018 Thomas Quiniou 22
L ’Editeur WEB Arduino
Sites à consulter :
https://create.arduino.cc/projecthub/Arduino_Genuino/getting-started-with-arduino-web-editor-on-various-platforms-4b3e4a
http://www.c-sharpcorner.com/article/guide-to-arduino-web-editor/
L’éditeur WEB
comporte 3 zones :
Navigation Zone de Codage
Affichage des options
selon le menu sélectionné
L2 Informatique - 2018 Thomas Quiniou 23L ’Editeur WEB Arduino
Un premier exemple : Hello World
• Connectez votre carte Arduino wifi sur votre PC à l’aide du câble USB
• Si besoin, téléchargez et installez le plugin Arduino pour Windows
1. Assurez vous que votre carte Uno
WiFi est bien reconnue
2 4 1 2. Créez un nouveau sketch
5 « Hello_World .ino»
3. Recopiez le programme
4. Cliquez sur le bouton « Verifiy »
5. Cliquez sur le bouton « Upload »
3
6. Cliquez sur le bouton « Monitor »
6
L2 Informatique - 2018 Thomas Quiniou 24L ’Editeur WEB Arduino
Un second exemple : LED Blinking
• Cliquez sur l’onglet « Examples » de la zone 1
• Dans la zone 2, sélectionnez « 01.Basics » puis « Blink »
• Le code s’affiche dans la zone 3
• Vérifiez le code
• Chargez le code
• Vérifiez que la LED clignote
• Analysez le code
L2 Informatique - 2018 Thomas Quiniou 25L ’Editeur WEB Arduino
L’onglet « Librairies »
• Cliquez sur l’onglet « Examples » de la zone 1
• Dans la zone 2, sélectionnez « 01.Basics » puis « Blink »
• Le code s’affiche dans la zone 3
• Vérifiez le code
• Chargez le code
• Vérifiez que la LED clignote
• Analysez le code
L2 Informatique - 2018 Thomas Quiniou 26Le langage Arduino (https://www.arduino.cc/reference/en/) Comme vous avez pu le constater avec les deux exemples précédents, le langage Arduino est très proche du C. Mais pas seulement, il intègre aussi des fonctionnalités empruntés au C++ : la syntaxe nom.fonction() n’existe pas en C pur, c’est du C++. Par exemple, Serial est un objet auquel sont associés des attributs (begin, print etc.). Structure La structure d’un code Arduino contient à minima deux fonctions, la fonction setup() et la fonction loop(). L2 Informatique - 2018 Thomas Quiniou 27
Le langage Arduino (https://playground.arduino.cc/French/Setup) La fonction setup() La fonction setup() est appelée au démarrage du programme. Cette fonction est utilisée pour initialiser les variables, le sens des broches, les librairies utilisées. La fonction setup n'est exécutée qu'une seule fois, après chaque mise sous tension ou reset (réinitialisation) de la carte Arduino. La fonction setup(), même vide, est obligatoire dans tout programme Arduino. Pour comprendre : les habitués du C seront surpris de ne pas trouver la classique fonction main() obligatoire dans tout programme C. En fait, la fonction setup() et la fonction loop() sont implémentées au sein de la fonction main() qui est appelée en premier lors de l'exécution de tout programme en C, langage sur lequel est basé le langage Arduino. L2 Informatique - 2018 Thomas Quiniou 28
Le langage Arduino (https://playground.arduino.cc/French/Loop) La fonction loop() Après avoir créé une fonction setup(), qui initialise et fixe les valeurs de démarrage du programme, la fonction loop () (boucle en anglais) fait exactement ce que son nom suggère et s'exécute en boucle sans fin, permettant à votre programme de s'exécuter et de répondre. Utiliser cette fonction pour contrôler activement la carte Arduino. La fonction loop() est obligatoire, même vide, dans tout programme. Licence SPI2 - 2018 Thomas Quiniou 29
Le langage Arduino : Structure (https://www.arduino.cc/reference/en/) L2 Informatique - 2018 Thomas Quiniou 30
Le langage Arduino : Variables (https://www.arduino.cc/reference/en/) L2 Informatique - 2018 Thomas Quiniou 31
Le langage Arduino : Fonctions prédéfinies (https://www.arduino.cc/reference/en/) L2 Informatique - 2018 Thomas Quiniou 32
Le langage Arduino : quelques règles
(https://fr.flossmanuals.net/arduino/comment-bien-structurer-son-code/)
Conventions de nommage
La syntaxe d'un langage de programmation se base généralement sur une « convention de nommage ». Il est
important de respecter cette nomenclature pour rester dans l'esthétique du code.
Dans la déclaration des variables, il faut écrire les constantes en majuscule :
const int CAPTEUR = A0; // CAPTEUR est une constante.
Pour les autres variables (int, char, etc.), les fonctions et les sous-routines seront en minuscule. Dans le cas où
ces variables ont des noms composés, le premier mot est en minuscule et les autres commencent par une
majuscule. Par exemple :
int bookSprint = 2011;
Pour les sous-routines (http://plaisirarduino.fr/les-fonctions/), la règle est identique à celle des variables composées.
Par exemple :
afficherValeurCapteur ();
Déclarer ses variables
Le nom des éléments (capteurs, actionneurs, etc. ) utilisés dans un projet sont généralement repris par les
variables du programme qui fait fonctionner le dispositif. Cette pratique permet de clarifier la fonction des
différentes variables. Par exemple pour choisir une variable qui a pour fonction de définir le port sur lequel est
connectée une LED, nous choisirons la variable suivante :
int brocheLed = 13;
L2 Informatique - 2018 Thomas Quiniou 33Le langage Arduino : quelques règles
(https://fr.flossmanuals.net/arduino/comment-bien-structurer-son-code/)
Indenter son code : il est conseillé d'effectuer un retrait par rapport à la ligne précédente à chaque nouveau
bloc d'instructions. Les blocs d'instructions inscrits dans les fonctions et boucles sont délimités par des
accolades, l'une est ouvrante et l'autre fermante.
Code non indenté Code indenté
if (etatCaptation == 1) { if (etatCaptation == 1) {
if (valeurCapteur >= seuil) { if (valeurCapteur >= seuil) {
analogWrite (pinLed, HIGH);} analogWrite (pinLed, HIGH);
} }
}
Il est à noter qu'un code indenté est plus attrayant et lisible. C'est un aspect qui facilite la recherche d'erreurs
éventuelles qui pourraient se glisser dans le code.
Faire des commentaires : il n'y a rien de plus embêtant qu'une instruction écrite dans un code et dont on a oublie
l'utilité quelques jours après. Les commentaires permettent de se retrouver dans son code. Ils facilitent en
outre la compréhension du code pour ceux qui en auront éventuellement besoin.
Ci-dessous, un commentaire sur plusieurs lignes explique le
fonctionnement du programme
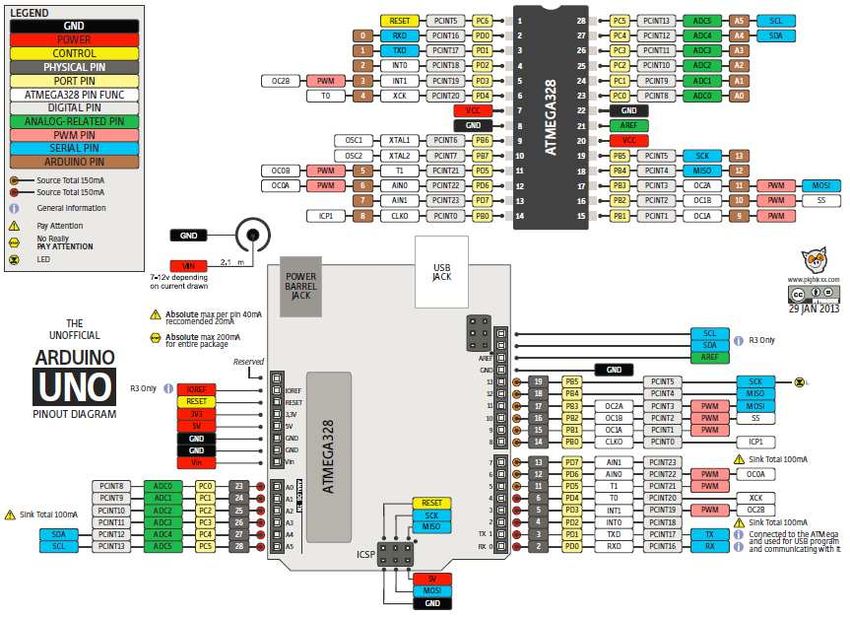
L2 Informatique - 2018 Thomas Quiniou 34http://www.microchip.com/wwwproducts/en/ATmega328P
Le µcontrôleur ATMEGA328P
(Page 25 de la datasheet)
µProcesseur 8bits Mémoires (Page 34 de la datasheet)
http://www.mon-club-
elec.fr/pmwiki_reference_arduino/pmwiki.php
?n=Main.PortManipulation
(Page 97 de la datasheet)
- Ports B et D : Broches numériques
(8 à 13 et 0 à 7)
Horloge - Port C: Broches
analogiques/numériques
(Page 48 de la datasheet)
Timer/Counter 0
Port SPI
(Serial Peripheral Interface)
(Page 215 de la datasheet)
(Page 305 de la datasheet)
Convertisseur Analog Comparator
(Page 299 de la datasheet)
Analogique/numérique
Interruption Port Série (Universal Synchronous
externe Asynchronous Receiver Transceiver)
(Page 87 de la datasheet) (Page 225 de la datasheet)
Timer/Counter
2-Wire Serial Interface (I2C)
1&2 (Page 260 de la datasheet)
(Page 186 de la datasheet)
http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_Datasheet.pdf
L2 Informatique - 2018 Thomas Quiniou 35Le µcontrôleur ATMEGA328P
http://quai-lab.com/arduino-ses-memoires/
https://www.carnetdumaker.net/articles/reduire-lempreinte-memoire-dun-programme-arduino-avec-progmem/
Les mémoires
La mémoire est l’un des principaux composants d’un ordinateur ou d’un microcontrôleur comme
l’Atmega, cœur de l’arduino. Les mémoires des AVR sont au nombre de 3 :
http://web.alfredstate.edu/faculty/weimandn/miscellaneous/atmega_miscellane
ous/ATmega Memory Map(b).gif
L2 Informatique - 2018 Thomas Quiniou 36Le µcontrôleur ATMEGA328P
• Flash : Peu coûteuse cette mémoire sert à stocker les programmes à exécuter, c’est une
mémoire qui perdure après arrêt de l’alimentation. Rapide, elle est donnée pour une capacité de
1 000 000 de cycles. L’atmega 328 en est doté de 32 kilos (d’où la référence 32..8)
• 0x3FFF (base 16) ⇒ 16384 emplacements (en base 10)
• Chaque emplacement correspond à 16 bits (D0 à D15)
• On a donc 16384X16, soit 262144 bits au total
• Un octet étant codé sur 8 bits, on a donc 32768 octets
• 1ko = 1024 ⇒ 32768/1024 = 32 ko
L2 Informatique - 2018 Thomas Quiniou 37Le µcontrôleur ATMEGA328P
• SRAM (Static Read Access Memory) : Coûteuse mais rapide, cette mémoire sert à stocker des
données temporaires (les variables de votre programme par exemple). C’est une mémoire
volatile. Votre Arduino Uno en possède seulement 2kilos, c’est peu et c’est probablement de là
que naîtrons vos premiers soucis de mémoire… (PROGMEM : Page 347 de la datasheet)
(Remarque : offset de 20 sur les adresses)
Lorsque l’on programme en assembleur, voire même en C, on doit connaitre les adresses et le rôle
des registres. On devra en effet positionner à 0 ou 1 tout ou partie des bits des registres liés à
l’action à réaliser. Par exemple, si on veut actionner le port B, il faudra renseigner les registres
PINB, DDRB et PORTB. Nous y reviendrons mais le langage Arduino permet, grâce à des fonctions
haut niveau, de programmer sans devoir nécessairement rentrer dans les détails des registres.
L2 Informatique - 2018 Thomas Quiniou 38Le µcontrôleur ATMEGA328P
• EEPROM (Electrically-Erasable Programmable Read-Only Memory ou mémoire morte effaçable
électriquement et programmable) : Elle permet le stockage par votre programme de données
persistantes, peut coûteuse, mais lente, l’atmega 328 en possède 1 kilo-octet. Cette mémoire
s’use plus rapidement, sa capacité est de 100 000 cycles d’écriture. Cette mémoire permettra à
vos programmes de stocker des données de log ou des états devant être conserver de manière
pérenne (après arrêt de l’alimentation). Cf : https://www.arduino.cc/en/Reference/EEPROM
L2 Informatique - 2018 Thomas Quiniou 39Les bases de l’électronique https://fr.flossmanuals.net/arduino/les-bases-de-lelectronique/ Avant d’aller plus loin dans la description des entrées/sorties de votre carte Arduino, il est nécessaire de faire un court rappel des bases en électronique. Vous allez utiliser des composants et des capteurs que vous allez relier à votre carte Arduino, Électricité (Wikipedia): L’électricité est l'effet du déplacement de particules chargées, à l’intérieur d'un « conducteur », sous l'effet d'une différence de potentiel aux extrémités de ce conducteur. Ce phénomène physique est présent dans de nombreux contextes : l'électricité constitue aussi bien l'influx nerveux des êtres vivants que les éclairs d'un orage. Elle est largement utilisée dans les sociétés développées pour transporter de grandes quantités d'énergie facilement utilisable. L2 Informatique - 2018 Thomas Quiniou 40
Les bases de l’électronique
Tension : La tension a pour unité le Volt (V). La tension se mesure avec un voltmètre, entre 2
bornes d'un appareil électrique (en parallèle ou dérivation).
Courant : Le courant électrique a pour unité l'Ampère (A). Il se mesure avec un ampèremètre en
insérant l'appareil de mesure dans le circuit électrique (en série).
Analogie avec un remonte pente
• La piste de ski représente le circuit électrique fermé (en
forme de boucle).
• Les skieurs représentent les charges électriques.
• Le remonte pente représente la pile.
• Le nombre de skieurs qui passe la ligne d'arrivée par
seconde représente le courant électrique
• La différence de hauteur entre le bas et le haut de la
piste représente la tension.
http://physique.chimie.29.free.fr/cinquieme/electricite/tension_courant/tension_courant.htm
L2 Informatique - 2018 Thomas Quiniou 41Les bases de l’électronique
Quelques composants
La résistance :
Une résistance R est un composant dont la principale caractéristique est d'opposer une
plus ou moins grande résistance (mesurée en ohms) à la circulation du courant électrique.
La tension U et le courant I sont reliés par la loi d’Ohm : U = R × I. Cette loi signifie que
lorsqu’une résistance est parcourue par un courant, une différence de potentiel s’établit
entre ses bornes.
Une résistance est un dipôle qui n’a pas de sens de branchement, vous pouvez
donc inverser les broches.
triangle URI
Comment évaluer la résistance ?
• Avec un ohmmètre
• Grâce au code couleur
L2 Informatique - 2018 Thomas Quiniou 42Les bases de l’électronique
Le condensateur : Par Eric Schrader from San Francisco, CA, United States — 12739s, CC
BY-SA 2.0, https://commons.wikimedia.org/w/index.php?curid=37625896
Le condensateur est un composant électronique élémentaire, constitué de deux
armatures conductrices (appelées « électrodes ») en influence totale et séparées
par un isolant polarisable (ou « diélectrique »). Sa propriété principale est de
pouvoir stocker des charges électriques opposées sur ses armatures. La relation
caractéristique d'un condensateur idéal est :
C est la capacité électrique du condensateur, exprimée en farads (symbole : F).
Il existe différents types de condensateurs, certains sont polarisés (condensateurs chimiques, attention au sens),
d’autres non (condensateur céramiques).
Alimentation Condensateurs de découplage
constante + bruit des alimentations
Les condensateurs sont utilisés principalement pour :
• stabiliser une alimentation électrique (il se décharge lors des chutes
de tension et se charge lors des pics de tension) ;
• traiter des signaux périodiques (filtrage…) ;
• séparer le courant alternatif du courant continu, ce dernier étant
bloqué par le condensateur (si u est constant ⇒ du/dt = 0 ⇒ i=0);
• stocker de l'énergie, auquel cas on parle de supercondensateur.
L2 Informatique - 2018 Thomas Quiniou 43Les bases de l’électronique La bobine (self en anglais) Une bobine, solénoïde, auto-inductance ou quelquefois self (par anglicisme), est un composant courant en électrotechnique et électronique. Une bobine est constituée d'un enroulement de fil conducteur éventuellement autour d'un noyau en matériau ferromagnétique qui peut être un assemblage de feuilles de tôle ou un bloc de ferrite. Les physiciens et ingénieurs français l'appellent souvent par synecdoque « inductance », ce terme désignant la propriété caractéristique de la bobine, qui est son opposition à la variation du courant dans ses spires. La relation caractéristique d'une bobine idéale est : L est l’inductance électrique de la bobine, exprimée en henry (symbole : H). Votre kit contient un relais électromécanique (KY-019, page 90 de la datasheet). Un relais est constitué d’un électroaimant (bobine entourant un noyau) qui permet l’ouverture ou la fermeture d’un circuit secondaire. La bobine emmagasine de l’énergie lorsqu’elle est alimentée, elle la restitue lorsque l’on coupe son alimentation (cf. formule). Si rien n’est fait pour protéger le circuit, la surtension engendrée peut l’endommager, il faut donc prendre quelques précautions. Le module KY-019 contient tous les éléments nécessaires, nous y reviendrons plus tard. L2 Informatique - 2018 Thomas Quiniou 44
Les bases de l’électronique
La diode et la diode électroluminescente (DEL ou LED en anglais)
La diode un dipôle qui ne laisse passer le courant électrique que dans un sens. Une diode électroluminescente est
une diode qui en plus s’allume lorsqu’un courant la traverse.
Diode
Vseuil ≈ 0,7V
DEL
L2 Informatique - 2018 Thomas Quiniou 45Les bases de l’électronique
http://henrysbench.capnfatz.com/henrys-bench/arduino-output-devices/5mm-led-basics-and-the-arduino-quick-facts/
La diode électroluminescente et Arduino
2. Calcul de la valeur de la résistance :
1. Circuit
1. Déterminer la tension de seuil de la diode (cf datasheet). Pour une LED rouge, elle est
d’environ 1,8V
2. Déterminer la tension à l’état haut d’une broche numérique. Avec une carte Arduino UNO,
elle est de 5V
3. Soustraire la tension de seuil de la diode à la tension du circuit : 5 - 1,8 = 3,2. Cette tension
correspond à la tension aux bornes de la résistance.
4. Déterminer le courant directe de la diode : 20 mA. Attention, ce courant doit être inférieur
au courant maximal délivré par la broche de l’Arduino (sortie numérique).
5. Déterminer la valeur de la résistance à partir de la loi d’Ohm : R = U / I = 3,2 / 0,02 = 160 Ω
⇒ Prendre une valeur de résistance normalisée égale ou supérieure à 160 Ω
4. Code
3. Câblage
>160
ohms
L2 Informatique - 2018 Thomas Quiniou 46Les bases de l’électronique
http://www.locoduino.org/spip.php?article122
Le bouton poussoir
Nous avons vu avec la diode comment utiliser une sortie numérique en activant celle-ci à l’état haut ou bas grâce à
la commande digitalWrite(pin, état). Le bouton poussoir va nous permettre de voir les entrées numériques et la
commande digitalRead(pin). La broche étant utilisée en entrée et non plus en sortie, il faudra l’indiquer dans votre
code à l’aide de la commande pinMode(pin, INPUT). La broche ne va donc plus piloter un courant, mais être à
l'écoute du courant en entrée. Un bouton poussoir est un interrupteur ouvert au repos et fermé lorsqu’il est
pressé (ou inversement).
Peut-on brancher directement le bouton poussoir sur une entrée numérique?
Vous ne risquez pas d’endommager la carte mais votre montage ne
fonctionnera pas comme prévu :
• Lorsque le bouton est pressé, l’entrée 2 est relié au +5V ⇒ OK
• Lorsque le bouton est relâché, l’entrée 2 est « en l’air », elle peut prendre
n’importe quelle valeur or on souhaiterait qu’elle soit à 0V ⇒ NOK
Pour information, cela est dû au fait que les entrées sont en « haute
impédance » (Hi-Z).
Pour remédier à cette situation, on va rajouter une résistance de pull-down
(résistance de tirage vers le bas) ou de pull-up (résistance de tirage vers le
haut).
L2 Informatique - 2018 Thomas Quiniou 47Les bases de l’électronique
Résistance de pull-down Résistance de pull-up
Logique inverse
• Lorsque le bouton est pressé, l’entrée 2 est relié • Lorsque le bouton est pressé, l’entrée 2 est reliée
directement au +5V (état haut) et la résistance R est directement à la masse (état bas) et la résistance de
parcourue par un courant de 5V/R ; si vous prenez une pull-down est parcourue par un courant de 5V/R.
résistance de 4,7 kΩ, le courant sera de 1,1 mA. • Lorsque le bouton est relâché, l’entrée 2 est relié au
• Lorsque le bouton est relâché, l’entrée 2 est reliée à +5V (état haut) et aucun courant ne traverse la
la masse via la résistance de pull-down (état bas) et résistance.
aucun courant ne traverse la résistance.
L2 Informatique - 2018 Thomas Quiniou 48Les bases de l’électronique
Le bouton poussoir, suite
Les résistances pull up sont très communes en électronique numérique, raison
pour laquelle le microcontrôleur qui équipe l’Arduino dispose de résistances de
pull up internes qui évitent l’utilisation de résistances externes. Ces
résistances internes ont une valeur comprise entre 20 et 50 Kilo-Ohm, certes
plus élevée que la valeur recommandée pour une résistance externe, mais
suffisante. Le schéma ci-après illustre le câblage du bouton poussoir sans
résistance de pull-up externe, la résistance de pull-up interne étant
représentée en traitillé et à l’intérieur de la carte Arduino.
Pour activer la résistance pull up interne d’une entrée, par exemple la no 2, il suffit d’écrire, dans la fonction setup :
pinMode (2, INPUT_PULLUP); à la place de : pinMode (2, INPUT);
Remarque : lorsque l’on presse ou relâche un bouton poussoir, il n’est pas rare que des rebonds (passages rapides
haut/bas) se produisent. Il est possible de filtrer ces rebonds en :
• rajoutant un condensateur (env. 10 nF) en // sur le bouton poussoir
• ou en testant dans le code l'état de l'entrée à deux reprises en peut de temps afin d'être sur que le
bouton poussoir est vraiment appuyé (voir par exemple : https://learn.adafruit.com/tilt-sensor/using-a-tilt-sensor).
L2 Informatique - 2018 Thomas Quiniou 49Les bases de l’électronique
Le bouton poussoir, suite
Votre kit contient un module KY-004 équipé d’un bouton poussoir et d’une résistance de pull-up de 10kΩ (entre
l’entrée V+ et la sortie Signal).
https://arduinomodules.info/ky-004-key-switch-module/
Exercice : câbler ce module sur l’entrée numérique 10 et écrire le code qui permet d’allumer ou d’éteindre une LED
en fonction de la position du bouton poussoir.
L2 Informatique - 2018 Thomas Quiniou 50Les bases de l’électronique
Quelques montages de base en électronique
Le pont diviseur de tension
Le diviseur de tension est un montage très classique et utile qui permet de diviser une tension d'entrée avec
seulement deux résistances. Imaginez que vous deviez mesurer une tension qui peut aller de 0 à 10V avec un
Arduino. Vous allez pour cela utiliser une entrée analogique (A0 par exemple) mais celle-ci ne peut mesurer que des
courant inférieurs à 5V. Il faut donc réduire la tension d’entrée afin de s’assurer qu’elle ne dépasse pas 5V faute
de quoi vous risquez d’endommager votre carte.
L’objectif est de calculer la valeur de R2 afin d’obtenir une tension U2 ≤ 5V quelque soit la
tension d’entrée. Il faut donc isoler R2 dans la formule du pont diviseur de tension :
U2×(R1 + R2) = U×R2 ⇒ U2×R1 + U2× R2 = U×R2 ⇒ U2×R1 = U×R2 - U2× R2
⇒ U2×R1 = R2×(U - U2) ⇒ R2 = R1×U2/(U - U2)
Si vous choisissez par exemple une résistance R1 = 1kΩ, vous obtiendrez :
R2 = 1000×5/(10 - 5) = 1000Ω = 1kΩ
Remarque : l’entrée du convertisseur est, pour faire simple, schématisé par la résistance
RL sur le circuit. Sa valeur est de plusieurs dizaines de Mégohms (typ. 100). Afin de ne pas
perturber le circuit, il faut prendre des valeurs de R1 et de R2 petites par rapport à RL. On
a pris dans l’exemple 1kΩ pour R1 mais on aurait pu prendre une valeur encore plus faible,
par exemple 100Ω. La contrepartie est que le courant consommé I sera beaucoup plus
important car I = U / (R1+R2).
L2 Informatique - 2018 Thomas Quiniou 51Les bases de l’électronique
Quelques montages de base en électronique
Potentiomètres et rhéostats (https://fr.wikipedia.org/wiki/Potentiomètre)
Un potentiomètre (appelé familièrement potard) est un type de résistance variable à trois bornes, dont une est
reliée à un curseur se déplaçant sur une piste résistante terminée par les deux autres bornes. Ce système permet
de recueillir, entre la borne reliée au curseur et une des deux autres bornes, une tension qui dépend de la position
du curseur et de la tension à laquelle est soumise la résistance (cf pont diviseur de tension).
10V Lorsque le curseur se déplace en les points A et B, le potentiel au point C
varie entre le potentiel au point A (0V par exemple) et le potentiel au
point B (10V par exemple). Le potentiomètre est donc un pont diviseur
dont les résistances internes varient selon la position du curseur (mais
0V R1+R2 reste constant)
Un rhéostat est une résistance variable. Il est
possible d’obtenir une résistance variable en reliant
l’une des extrémités (B par exemple) d’un
potentiomètre au curseur (C). Dans ce cas, on dit
que la résistance R2 est court-circuitée.
L2 Informatique - 2018 Thomas Quiniou 52Les bases de l’électronique
Quelques montages de base en électronique
Câblage d’un relais
Si vous devez piloter un module qui consomme du courant (un moteur par exemple), vous ne pourrez pas le brancher
directement sur une sortie de l’Arduino car celle-ci ne peut délivrer qu’au plus 20mA. Une solution est d’utiliser un
relais qui servira d’interrupteur (moteur ON ou OFF).
Le relais change d’état lorsque la bobine est traversée par un
courant. Là non plus, vous ne pourrez pas brancher
directement votre Arduino sur la bobine du relais. Il faudra
utiliser un transistor (par exemple 2N2222) qui est un
composant à 3 broches (b = base, e = émetteur, c= collecteur).
Lorsque la sortie de l’Arduino (Digital Pin sur le schéma) est à
l’état bas, le transistor fonctionne comme un interrupteur
ouvert et aucun courant ne traverse la bobine. Lorsqu’elle est
à l’état haut, l’interrupteur est fermé, un courant le traverse
(entre c et e) et le moteur tourne. Dans cette configuration,
un transistor fonctionne comme un robinet ouvert ou fermé, la
base b correspondant à la poignée de commande.
La diode D1 (par exemple 1N4004) est une diode dite de roue Attention, cette partie du
schéma est fausse voire
libre. Elle permet d’éviter d’endommager le transistor lorsque
dangereuse. Une idée?
l’on coupe l’alimentation de la bobine.
L2 Informatique - 2018 Thomas Quiniou 53Les bases de l’électronique
Les entrées analogiques (CAN)
Un convertisseur analogique-numérique (CAN, parfois convertisseur A/N, ou en anglais ADC pour Analog to Digital
Converter ou plus simplement A/D) est un montage électronique dont la fonction est de traduire une grandeur
analogique en une valeur numérique (codée sur plusieurs bits). http://lewebpedagogique.com/physiris/2018/01/31/29604/
L’Arduino UNO possède 6 entrées analogiques, numérotées de A0
à A5, reliées à un convertisseur analogique/numérique qui renvoie
210-1 = 1023
un code numérique sur 10 bits, soit une valeur comprise entre 0 et
1023. La pleine échelle est de 5V, c'est à dire que la valeur
numérique 0 correspond à 0V et la valeur numérique 1023
correspond à 5V. Ainsi le pas de quantification est de 5V/1024 soit
environ 5 mV.
http://hebergement.u-psud.fr/villemejane/eiti/index.php/2017/09/16/arduino-entrees-analogiques/
Initialisation d'une entrée analogique
Les entrées analogiques A0 à A5 sont automatiquement paramétrées au démarrage du programme. Il n'y a donc rien
à faire pour spécifier leur utilisation.
L2 Informatique - 2018 Thomas Quiniou 54Les bases de l’électronique
Les entrées analogiques (CAN)
Lecture d'une entrée analogique
Pour pouvoir lire une entrée analogique, il vous faudra utiliser la fonction analogRead(pin) où pin correspond au
numéro de la broche que l'on souhaite lire : A0 à A5.
Afin de mettre en œuvre cette entrée analogique, nous allons utiliser un potentiomètre dont le curseur sera relié à
l’entrée A0. En fonction de la position du curseur et en modifiant/complétant le code ci-dessous, vous afficherez
la tension lue.
Remarque : il existe une fonction de mappage bien pratique
https://www.arduino.cc/reference/en/language/functions/math/map/
A voir aussi : https://openclassrooms.com/courses/programmez-vos-premiers-montages-
avec-arduino/utilisez-les-potentiometres-les-entrees-analogiques-et-la-fonction-de-
mappage
L2 Informatique - 2018 Thomas Quiniou 55Les bases de l’électronique
http://www.locoduino.org/spip.php?article4
http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.ApprendrePWM
Pulse Width Modulation (PWM)
Jusqu’à présent, nous avons vu l’émission de signaux numériques par le biais des broches numériques et de la
fonction digitalWrite(...) afin d’allumer et d’éteindre une DEL. Ces signaux numériques ont soit une valeur égale à
LOW, c’est à dire 0V, soit une valeur égale à HIGH, ce qui correspond à la tension d’alimentation de l’Arduino, VDD,
soit 5V pour les Arduino à base de micro-contrôleurs AVR.
Mais les sorties numériques ne nous permettent pas, par exemple, de régler la luminosité de la DEL, ou de faire
varier la vitesse de rotation d’un moteur. Pour pouvoir faire cela, il serait nécessaire de pouvoir disposer de sorties
permettant des tensions intermédiaires entre LOW et HIGH (conversion numérique/analogique).
Mais ceci n’existe pas sur les Arduino à base d’AVR. L’alternative est d’utiliser une PWM, pour Pulse Width
Modulation, ou MLI en français pour Modulation de largeur d’impulsion.
Qu’est ce que la PWM ?
On reste en numérique, les signaux ont toujours une valeur LOW ou HIGH et le principe est de construire un signal
qui est alternativement LOW et HIGH et de répéter très vite cette alternance. La DEL est donc alternativement
allumée et éteinte mais le cycle est tellement rapide que la persistance rétinienne nous donne l’illusion d’une DEL
allumée en permanence.
L2 Informatique - 2018 Thomas Quiniou 56Les bases de l’électronique
Pulse Width Modulation (PWM)
• Prenons par exemple une période de 10ms, soit une
fréquence de 100Hz. Si la DEL est allumée pendant
5ms et éteinte pendant 5ms, comme sur la figure ci-
dessous, l’impression sera une luminosité de 50% de
la luminosité maximum.
• Si la DEL est allumée pendant 1ms et éteinte pendant
9ms, l’impression sera une luminosité de 10% comme
sur la figure ci-dessous.
Le pourcentage de temps passé à l’état HIGH sur la période du signal est appelé le rapport cyclique. Il varie donc
de 0%, le signal est tout le temps LOW, à 100%, le signal est tout le temps HIGH.
La fréquence de la PWM est prédéterminée sur l’Arduino. Il est possible de la changer mais ce n’est pas une
possibilité accessible très simplement. La fréquence n’est pas la même selon les broches. Sur le Uno, la fréquence
est de 490Hz sur les broches 3, 9, 10 et 11 et de 980Hz sur les broches 5 et 6.
L2 Informatique - 2018 Thomas Quiniou 57Les bases de l’électronique
Pulse Width Modulation (PWM)
Mise en œuvre :
Nous allons mettre en œuvre la PWM avec une simple DEL. Mais contrairement au montage page 46, nous n’allons
pas utiliser la broche 2 mais la 3 qui est une broche PWM.
En ce qui concerne la programmation, la fonction permettant
de fixer le rapport cyclique de la PWM est la fonction
analogWrite(...). Nom bien mal choisi puisque, comme on l’a
vu, tout est numérique. Le premier argument de
analogWrite(...) est la broche concernée et le second
argument le rapport cyclique. Le rapport cyclique n’est pas
donné de 0 à 100 mais de 0 à 255. Il faut donc faire une
règle de 3 pour calculer la valeur à appliquer pour le rapport
cyclique voulu. Par exemple, la valeur à appliquer pour un
rapport cyclique de 75% sera égal à 0,75 x 255 = 191.
Remarque : vous pouvez aussi utiliser la fonction MAP
L2 Informatique - 2018 Thomas Quiniou 58Les bases de l’électronique
Pulse Width Modulation (PWM)
Voici pour commencer un programme très simple qui augmente
progressivement, de 1 en 1, la luminosité de la DEL de 0,
extinction totale, à 255, luminosité maximum, puis recommence
à 0. On va fixer le temps de ce cycle à 1000ms. Le délai entre
chaque augmentation est donc de 1000 / 255 = 3,922 ms.
Arrondissons à 4ms. En utilisant un byte pour stocker la valeur,
nous pouvons profiter du débordement qui se produit lorsque,
étant à 255, l’ajout de 1 fait repasser la valeur 0. Voir à ce
propos « Types, constantes et variables ». Vous noterez
également qu’il n’est pas nécessaire de programmer la broche en
sortie pour son utilisation en tant que sortie PWM. Cette
programmation s’effectue automatiquement lors du premier
analogWrite(). Malgré tout il faut que la fonction setup() soit
présente même si elle est vide.
Exercice : proposez un circuit, et le code Arduino correspondant, qui permet de modifier la luminosité d’une
LED en fonction de la position d’un potentiomètre.
L2 Informatique - 2018 Thomas Quiniou 59Vous pouvez aussi lire