Modèles macroscopiques de la circulation - A - Hamzeh Alizadeh, Ph.D. Coordonateur - Données mobilité et modélisation - Moodle ...
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Modèles macroscopiques de la circulation – A Hamzeh Alizadeh, Ph.D. Coordonateur – Données mobilité et modélisation exo Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 1

Introduction ➢ Tel que discuté précédemment, il existe deux types de relations entre les caractéristiques des flux de trafic: : 1. La relation débit-vitesse-densité ou la relation d'identité: = × • Une identité est une égalité qui est vraie quelles que soient les valeurs choisies pour ses variables. Ils sont souvent utilisés pour simplifier ou réorganiser des expressions algébriques: + 2 = 2 + 2 + 2 . • Il est spécifique à l'emplacement et au même moment: ( , ) = ( , ) × ( , ) et au temps, c'est-à-dire que le débit, la vitesse et la densité doivent se référer au même endroit Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 2
Introduction ➢ Tel que discuté précédemment, il existe deux types de relations entre les caractéristiques de flux de trafic: 2. Relations par paires ou modèles d'équilibre: Ces relations: • Définissent le diagramme fundamental. • Ils sont spécifiques à un emplacement, c'est-à-dire que différents emplacements et routes peuvent avoir différents diagrammes fondamentaux. • Ce sont des modèles d'équilibre, c'est-à-dire qu'ils décrivent un ➔ comportement en régime permanent à long terme et ne sont donc pas spécifiques à un moment particulier. • De telles relations n'ont qu'une signification statistique; c'est-à-dire que les signes égaux ne sont pas strictement valables dans le monde réel. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 3
Théorie de la circulation- Objectif ➢ Le principal objectif de la formulation d'une théorie de la circulation est d'aider à mieux comprendre l’état de la circulation et, par l'application de ces connaissances, de contrôler le trafic pour des opérations plus sûres et plus efficaces. ➢ Donc, une bonne théorie devrait pouvoir aider à répondre aux questions suivantes: • Compte tenu des conditions de circulation existantes sur une route et des arrivées futures, comment les conditions de circulation routière évoluent-elles dans le temps? • Où sont les goulots d'étranglement, le cas échéant? • En cas de congestion, combien de temps dure-t-elle et jusqu'où les files d'attente se propagent? • En cas d'incident, quelle est la meilleure stratégie pour minimiser l'impact sur la circulation? ➢ Les réponses à ces questions impliquent l'analyse de l'évolution dynamique des états de la circulation dans le temps et dans l'espace. ➢ Les modèles d'équilibre ne sont capables que de décrire ces états et ne fournissent pas de mécanisme pour analyser comment ils évoluent. ➢ Ce chapitre présente des modèles dynamiques pour répondre à ces questions. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 4
L'équation de continuité ➢ La dérivation d'une équation dynamique commence par l'examen d'un petit volume de trafic routier en tant qu’un flux continu. ➢ On considère le flux de trafic comme un fluide compressible unidimensionnel, comme un gaz. ➢ Les lois de conservation s'appliquent à ce type de fluide. ➢ La forme de conservation de premier ordre est la conservation de masse, également connue sous le nom d'équation de continuité. ➢ Nous introduisons 3 perspectives différentes pour dériver les équations de continuité: • Dérivation 1 - Différence finie, • Dérivation 2 - Dynamique des fluides, • Dérivation 3 - Représentation tridimensionnelle du flux de trafic. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 5
Dérivation 1 - Différence finie ➢ Supposons qu'une section d'autoroute soit délimitée par deux stations d'observation à 1 et 2 . ➢ Soit ∆ = 2 − 1 la longueur de la section. ➢ Pendant l'intervalle de temps ∆ = 2 − 1 , 1 véhicules ont dépassé 1 et 2 véhicules ont dépassé 2 . Par conséquent, les débits à ces endroits sont: , ➢ Le changement du nombre de véhicules dans la section est: Section de route pour obtenir l'équation de continuité Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 6
Dérivation 1 - Différence finie ➢ Supposons que les densités de trafic dans la section au moments 1 et 2 soient respectivement 1 et 2 . ➢ Par conséquent, il y a 1 = 1 ∆ véhicules dans la section au temps 1 et 2 = 2 ∆ véhicules dans la section au temps 2 . ➢ Le changement du nombre de véhicules dans la section peut être exprimé comme: ➢ Puisque les véhicules ne peuvent pas être créés ou détruits à l'intérieur de la section, le changement du nombre de véhicules doit être le même dans la même section pendant le même intervalle de temps. Par conséquent, ∆ = ∆ — c'est-à-dire: ➔ ➢ En divisant les deux côtés par ∆ ∆ , nous obtenons: ∆ → 0 Section de route pour obtenir ➔ ➔ ∆ → 0 l'équation de continuité Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 7

Dérivation 2 - Dynamique des fluides ➢ La figure illustre un petit cube fluide de taille × × ➢ La vitesse du fluide et la densité de deux côtés du cube sont aussi indiquées. ➢ Le débit de masse entrant dans le cube est de . ➢ Le débit de masse sortant du cube est de: ➢ La masse stockée dans le cube équivaut à la masse qui entre moins la masse qui en sort: Petit cube de fluide pour dériver l'équation de continuité Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 8
Dérivation 2 - Dynamique des fluides ➢ Si nous ignorons le terme d'ordre supérieur, nous obtenons: ➢ Un traitement similaire s'applique aux deux autres directions du cube, donc la masse totale stockée dans le cube est: ➢ La masse stockée dans le cube doit être équilibrée par le changement de masse entrant et sortant le cube: ➢ La loi de la conservation de masse exige que: ➔ Petit cube de fluide pour dériver l'équation de continuité Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 9
Dérivation 2 - Dynamique des fluides ➢ Le trafic routier constitue un cas particulier de la situation ci-dessus avec une seule dimension: ➢ Notez que = . Donc: Petit cube de fluide pour dériver l'équation de continuité Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 10
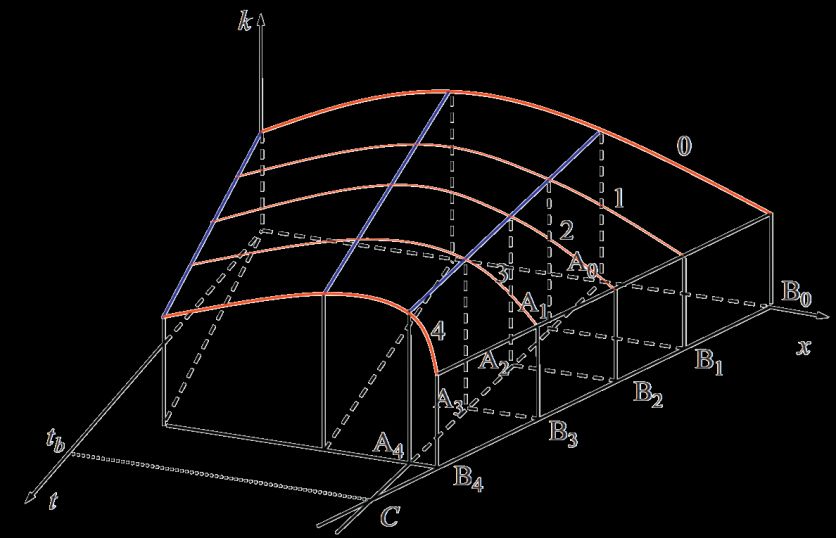
Dérivation 3: Représentation tridimensionnelle ➢ Comme discuté précédemment, la surface qui représente le nombre cumulé de véhicules, , peut être exprimée en fonction du temps et de l'espace — c'est-à-dire, = ( , ). ➢ La densité d’un point espace-temps ( , ) est la première dérivée partielle de ( , ) par rapport à , mais prend une valeur négative: ➢ Le débit en ( , ) est la première dérivée partielle de ( , ) par rapport à : Fonction du nombre cumulé de véhicule ( , ) Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 11
Dérivation 3: Représentation tridimensionnelle ➢ Si le débit et la densité ont des dérivés du premier ordre: ➔ ➢ Donc: Fonction du nombre cumulé de véhicule ( , ) Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 12
Modèle dynamique de premier ordre ➢ L'évolution de la circulation est le processus de changement des états de la circulation (par exemple, débit , vitesse et densité ) au fil du temps et de l'espace en considérant certaines conditions initiales (par exemple, 0 = (0, )) et les conditions aux limites (par exemple, ( ) = ( , 0 )). ➢ On reconnaît que le temps et l'espace sont des variables indépendantes et les états de la circulation sont des variables dépendantes, c'est-à-dire que ce sont des fonctions du temps et de l'espace ( = ( , ), = ( , ), = ( , )). ➢ Les équations de continuité dérivées avant relient dynamiquement le changement de débit au changement de densité ➢ Cette équation contient deux variables inconnues ( , ) et ( , ). Puisque le nombre de variables inconnues est supérieur au nombre d'équations, le problème est sous-spécifié. Pour cette raison, une autre équation simultanée est nécessaire. ➢ La fonction d'identité devient pratique: ( , ) = ( , ) × ( , ) Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 13
Modèle dynamique de premier ordre ➢ En ajoutant cette nouvelle équation, nous introduisons une troisième variable inconnue — la vitesse ( , ). ➢ Par conséquent, une troisième équation simultanée est nécessaire. ➢ Nous sommes incapables de trouver une troisième équation gouvernante qui soit valable pour n'importe quel conditions de temps et espace. ➢ Par conséquent, nous devons accepter l'option (moins qu'idéale) en examinant les modèles d'équilibre (par exemple, le modèle Greenshields), qui ne sont valides que statistiquement. Un tel modèle prend la forme de: ➢ En mettant tout ensemble, on obtient un système de trois équations impliquant trois variables inconnues: ➢ Si les conditions initiales et aux limites sont fournies, le système d'équations ci-dessus peut être résolu. ➢ On peut déterminer l'état de la circulation à un point arbitraire de l'espace-temps ( , )—c'est-à- dire, ( , ), ( , ), et ( , ), et répondre aux questions posées au début de cette section. ➢ Cependant, résoudre un tel système d'équations n'est pas facile! Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 14
Phénomène des ondes ➢ Les ondes sont partout dans le monde réel. • Sur un lac • Un stade de soccer • En secouant une corde ➢ Une onde est la propagation d'une perturbation dans un milieu dans le temps et dans l'espace. ➢ Si nous appliquons la notion à un peloton de véhicules sur une autoroute, lorsque l'un des véhicules freine brusquement puis reprend sa vitesse d'origine, les véhicules suivants seront affectés successivement. ➢ La propagation d'une telle perturbation est une onde et la circulation est le milieu. Les vagues de circulation sur une autoroute Vagues Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 15
Représentation mathématique ➢ Les ondes sont décrites par des équations aux dérivées partielles (EDP). Exemple: ➢ Notez que: • Si une variable dépendante est fonction de variables indépendantes et , on écrit = ( , ) et on note ses dérivées partielles par rapport à et comme suit: • Une EDP pour ( , ) est une équation qui implique une ou plusieurs dérivées partielles de par rapport à et , par exemple: Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 16
Représentation mathématique ➢ Les EDP peuvent être classés en fonction de leur ordre, de leur homogénéité et de leur linéarité. Ordre ➢ L'ordre d'une EDP est l'ordre de la dérivée partielle la plus élevée de l'équation. Par exemple: ➢ Une EDP de premier ordre peut être exprimée sous la forme générale suivante: • Où , et sont des coefficients, et ils peuvent être des fonctions de , et . Homogénéité ➢ Une EDP du premier ordre ( , , ) + ( , , ) = ( , , ) est • homogène si ( , , ) = 0; • non homogène si ( , , ) ≠ 0. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 17
Représentation mathématique Linéarité ➢ Dans l'EDP générale du premier ordre ci-dessus, si et sont tous deux indépendants de , c'est-à-dire = , , = , , et • Si est également indépendant de — c'est-à-dire, = ( , ) — alors l’EDP est strictement linéaire. Par exemple, 2 + 3 = 5 . • Si dépend linéairement de — c'est-à-dire, = ( , , ) — alors l’EDP est linéaire. Par exemple, 2 + 3 = 5 + 3. • Si dépend de de manière non linéaire, alors l’EDP est semi-linéaire. Par exemple, 2 + 3 = . ➢ Si ou dépend de , ou si et dépendent tous les deux de , c'est-à-dire = ( , , ), = ( , , ), et = ( , , ), alors la PDE est quasilinéaire. Par exemple, + (3 + 2) = 0. ➢ Une EDP est non linéaire si elle implique des termes croisés de et de ses dérivés, par exemple, + = 2. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 18
Ondes progressives ➢ De nombreux EDP ont des solutions sous forme d’une onde progressive: , = − ➢ La figure illustre deux exemples d'onde progressive, ( − 0 ) et ( − 1 ). ➢ Notez que: 1. L'onde progressive conserve sa forme 2. L'onde au temps 1 est simplement une translation horizontale de son profil initial au temps 0 ➢ Si est une constante positive, l'onde ( , ) = ( − ) se déplace vers la droite au fil du temps, tandis que l'onde ( , ) = Une onde progressive ( + ) se déplace vers la gauche. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 19
Solutions des ondes progressives ➢ Pour résoudre l'équation d'onde suivante où est une constante: ➢ Supposons qu'une solution prenne une forme progressive ( , ) = ( − ). Soit − = . Donc: ➢ De même: ➢ En mettant les résultats obtenus dans l'équation d'onde, on obtient: ➢ Le partie gauche de l’équation peut être égal à 0 de deux manières: 1. Si 2 − = 0, alors ( , ) = ( ± ), où peut prendre n'importe quelle forme fonctionnelle. 2. Si ′′ = 0, alors ( , ) = + ( − ), où et sont des constantes arbitraires. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 20
Front d'onde et impulsion ➢ Une onde progressive est appelée un front d'onde si: ➢ Une onde progressive est appelée une impulsion si 1 = 2 Un front d'onde Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 21
Solution générale aux équations d'onde ➢ Comme mentionné précédemment, l'équation d'onde dans une dimension est exprimée par: ➢ De nombreuses équations d'onde ont une solution générale sous forme de superposition d'ondes progressives: ➢ Notez que même si chacun des termes sur la partie droite est une onde progressive, leur superposition ne l'est pas nécessairement. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 22
Solution générale aux équations d'onde Méthode de changement de variables: Définissez 2 2 = 2 ➔ = ➔ deux nouvelles = + , = − 2 2 coordonnées Conversion des 2 2 2 2 2 2 2 2 dérivées partielles = + = + ➔ 2 = 2 + + + 2 = 2 + 2 + 2 en t et x en dérivées➔ ➔ partielles en r et s 2 2 2 2 2 = + = − ➔ = 2 + − − 2 en utilisant la règle 2 de la chaîne. Appliquez à nouveau la règle de la chaîne pour trouver les 2 2 2 2 2 2 = − 2 + secondes dérivées 2 2 Mettre dans 2 2 2 2 2 2 2 2 l'équation ➔ 2 2 − 2 2 + 2 2 = 2 +2 + ➔ 4 2 =0 ➔ =0 d'onde: 2 2 Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 23
Solution générale aux équations d'onde Méthode de changement de variables: f est une fonction L'anti-dérivé pure de r de h (s) Intégrer Intégrer = + ( ) 2 =0 par ➔ = ℎ( ) ➔ par ➔ rapport à r rapport à s Nous avions h est une également: = + , = − ➔ fonction pure de s La solution générale de l'équation des ondes , = + + ( − ) Onde progressive temps Ainsi, à mesure que le Puisque f (0) a une En fait, tous les autres Supposons que vers l'arrière temps augmente, la valeur fixe, un point de points tels que f (1), f (-1), nous choisissions un + = 0 ➔ = − position horizontale de ➔ valeur fixe recule dans ➔ etc. reculent également à ➔ + point fixe f(0) sur la Vitesse de la même vitesse f (0) recule l'espace fonction f. l’onde ➔ La solution générale à l'équation de l'onde est une onde Avec la même logique ➔ ( − ) progressive vers l'arrière superposée par une onde progressive Onde progressive vers l'avant vers l'avant Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 24
Solution de d'Alembert à l'équation des ondes Pas de conditions Solution dans un domaine unidimensionnel infini −∞ < < +∞, > 0 explicites aux limites Un certain 2 2 , 0 = 0 ( ) = 2 ➔ = déplacement initial 2 2 ቤ = 0 ( ) Une certaine vitesse =0 initiale Solution Remplacez les f et g sont des inconnues conditions initiales La solution (1) générale de , = + + ( − ) ➔ , 0 = + 0 + − 0 = + ( ) l'équation des ondes (2) ➔ = ’ + + ’( − )(− ) ➔ ቤ = 0 = ’ − ’( ) =0 : = ’( ( )) ’( ) Variable d'intégration fictive Intégrer de න 0 = − ( 0 ) − − ( 0 ) 0 à 0 1 ➔ න + 0 + 0 = − ( ) 0 0 Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 25
Solution de d'Alembert à l'équation des ondes Solution dans un domaine unidimensionnel infini + ( ) ➔ 1 1 + 0 − 0 Et remplacez x par x + ct + = 0 + + න 0 + 2 2 0 2 pour obtenir une expression de l'onde progressive vers l'arrière − ( ) ➔ 1 1 − 0 − 0 Et remplacez x par x-ct pour − = 0 − − න 0 + 2 2 0 2 obtenir une expression de l'onde progressive vers l'avant La solution 1 1 + générale de , = + + − = 0 + + 0 − + න l'équation des 2 2 − 0 ondes 1 1 + Solution de d'Alembert à , = 0 + + 0 − + න l'équation des vagues 2 2 − 0 Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 26
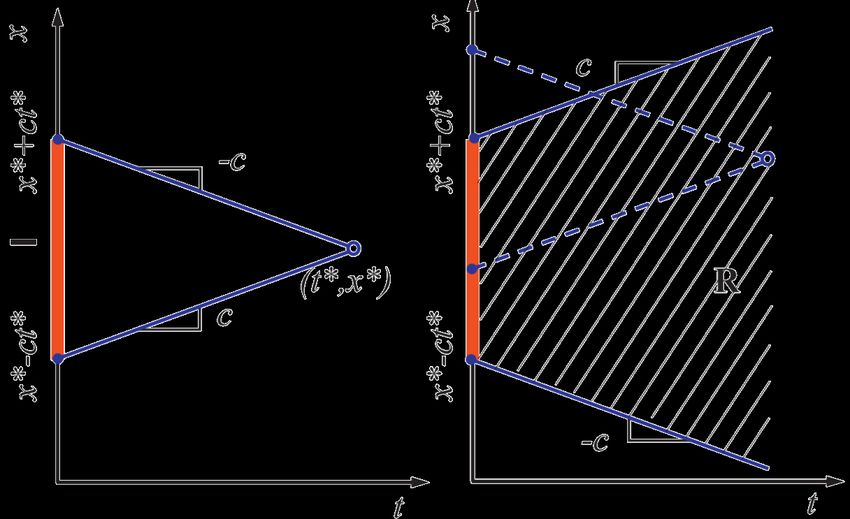
Caractéristiques ➢ Donc, il a été démontré que si: La solution prend la forme suivante: ➢ En appliquant la conclusion ci-dessus, on remarque que la solution à un point arbitraire de l'espace-temps ( ∗ , ∗) est: ➢ L'équation ci-dessus suggère que la solution en un point arbitraire ( ∗ , ∗ ) peut être déterminée par ➢ La condition initiale aux points (0, ∗ − ∗ ) et (0, ∗ + ∗ ) ➢ Et, l'intervalle délimité par les deux points (inclusive) — c'est- à-dire, = [ ∗ − ∗ , ∗ + ∗ ]. ➢ Ceci est illustré dans la partie gauche de la figure. Par conséquent, l'intervalle est appelé le domaine de dépendance du point ( ∗ , ∗ ). Caractéristiques Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 27
Caractéristiques ➢ Notez que dans la partie gauche de la figure, les ➢ Le terme « zone d'influence » se réfère à un deux lignes venant du point ( ∗ , ∗ ) croisant l'axe ensemble de points spatio-temporels dont des en (0, ∗ − ∗ ) et (0, ∗ + ∗ ) ont des les solutions sont influencées en tout ou en pentes et − . Ces deux lignes sont appelées partie par le domaine de dépendance ; voir lignes des caractéristiques ou simplement la zone hachurée dans la partie droite de la caractéristiques. figure. ➢ Quand: , ➔ la solution de l'équation d'onde se réduit à: ➢ Cela montre que la valeur de en ( , ) ne dépend que des valeurs initiales de en deux points, 1 = − et 2 = + . ➢ Une fois les valeurs initiales (0, − ) et (0, + ) sont identifiées, on construit la solution en ( , ) en prenant la moyenne de (0, 1 ) and (0, 2 ). Caractéristiques Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 28
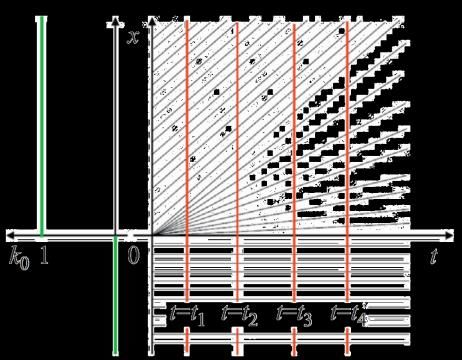
Caractéristiques Exemple ➢ Utilisez les caractéristiques pour résoudre l'équation d'onde suivante: Solution ➢ Dans cette équation, la vitesse de l'onde progressive est = ±2 — c'est- à-dire, ( , ) = ( ± 2 ). ➢ Tout d'abord, construire un diagramme − . ➢ Localiser les points 0 et 1 sur l'axe des x. ➢ Dessiner ensuite deux caractéristiques (leurs pentes sont de ± 2) à partir de chacun des deux points. ➢ Les quatre caractéristiques divisent le plan − en six régions comme indiqué sur la figure. Solution utilisant la méthode des caractéristiques Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 29
Caractéristiques Example ➢ Utilisez les caractéristiques pour résoudre l'équation d'onde suivante: Solution ➢ Prenons un point arbitraire ( 0 , 0 ). ➢ La solution à ce stade est trouvée en tirant deux caractéristiques de ce point. ➢ Trouvez ensuite les intersections des deux caractéristiques sur l’axe des . ➢ Ensuite, trouvez les valeurs aux deux intersections. Dans ce cas, les valeurs sont 1 et 0. ➢ Alors la solution au point ( 0 , 0 ) est la moyenne des valeurs aux deux intersections, c'est-à-dire, 0 , 0 = 1/2. Solution utilisant la méthode des caractéristiques Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 30
Caractéristiques Example ➢ Utilisez les caractéristiques pour résoudre l'équation d'onde suivante: Solution ➢ Avec l'utilisation d'une technique similaire, la solution dans d'autres régions peut être déterminée. Solution utilisant la méthode des caractéristiques Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 31
Méthode des caractéristiques ➢ Considérons une EDP très simple dérivée de la loi de conservation avec une condition initiale: ➢ Si l'on suppose = , où est une constante, alors = , et le EDP peut être défini comme suit: ( ) ➢ Le but est de trouver une solution à cette EDP ➔ Cela équivaut à trouver la valeur de à un point arbitraire de l'espace-temps, ( , ). ➢ Plutôt que de travailler sur un point arbitraire dans tout le diagramme espace-temps, on commence par un cas plus simple en travaillant sur un point sur une courbe spécifique dans le diagramme. ➢ Pour ce faire, supposons une courbe = ( ). Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 32
Méthode des caractéristiques ➢ Donc, l’objectif est de trouver la valeur de en un point arbitraire ( , ( )) sur la courbe — c'est-à-dire, , , et d'examiner comment change le long de la courbe = ( ). ➢ Le taux de changement de avec le temps est la première dérivée de par rapport au temps ; c-à-d : ( ) ➢ En comparant ( ) et ( ), nous avons: ➔ ➢ Cela signifie que la dérivée temporelle totale de le long de la courbe = ( ) est nulle ➔ La valeur de est constante le long de la courbe. ➢ Cela implique que la courbe = ( ) doit être dessinée de telle sorte que ce soit une droite avec une pente de . Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 33
Méthode des caractéristiques ➢ Pour trouver l'équation de la droite, nous devons résoudre l'équation différentielle ordinaire suivante: Intégrer par rapport à t ➢ Au temps = 0, cette droite croise l'axe en 0 . ➢ Puisque reste constant le long de cette droite, la solution en tout point de cette droite, ( , ( )), est la même que (0, 0 ) = ( 0 ), qui est donnée par la condition l'initiale. ➢ Par conséquent, nous avons trouvé la solution pour tous les points de cette ligne. Une telle ligne est appelée une caractéristique. C'est la même chose que les caractéristiques précédemment expliquées, où il s'agit d'une ligne tracée à partir d'un point de l'espace-temps avec la pente , qui est la vitesse de l'onde progressive ( − ). ➢ Puisqu'une caractéristique désigne un ensemble de points de l'espace-temps sur lesquels la solution de reste constante, peut être multivaluée à l'intersection de deux caractéristiques. Un tel événement est appelé une catastrophe de gradient. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 34
Méthode des caractéristiques Résumé ➢ La méthode des caractéristiques a été discutée comme un moyen de résoudre l'équation de continuité (la loi de conservation) avec une condition initiale: ➢ Où = ( ) est une fonction de : ➢ Pour trouver la solution de en un point arbitraire de l'espace-temps ( ∗ , ∗ ), ( ∗ , ∗ ), on construit simplement une caractéristique = + 0 qui part de ( ∗ , ∗ ) et se prolonge vers l'axe des à l'intersection (0, ∗ − ∗ ). ➢ Puisque ((0, ∗ − ∗ )) = 0 ( ∗ − ∗ ) est donné dans la condition initiale et reste constant le long de la caractéristique, la solution est: Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 35
Catastrophe de gradient ➢ Dans cette solution, si est constant, les caractéristiques tirées de deux points différents de l'espace-temps restent des lignes droites et parallèles. • Alors, tout point de l'espace-temps se trouve sur une et une seule caractéristique, et la solution à ce point est à valeur unique. Catastrophe de gradient ➢ Cependant, si est une fonction de , = ( ), et ne dépend pas explicitement de ou , deux caractéristiques différentes tirées de deux points de l'espace-temps sont toujours des lignes droites mais elles ne sont pas nécessairement parallèles (elles peuvent se croiser). ➢ La solution à cette intersection peut avoir plusieurs valeurs. Profil de solution illustrant la catastrophe de gradient Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 36
Catastrophe de gradient ➢ Au fur et à mesure que les deux caractéristiques se rapprochent, la pente du profil de la solution (courbes rouges au-dessus des caractéristiques) devient de plus en plus abrupte. ➢ A l'intersection de deux caractéristiques (point ), le profil de solution aura un gradient infini en ce point. Catastrophe de gradient ➢ La formation d'un tel gradient infini s'appelle une catastrophe de gradient. ➢ Le moment où se produit un gradient infini est appelé le temps de rupture (break time) . ➢ Après ce point, le profil de solution cesse d'être une fonction valide et la solution au-delà du temps de rupture sera problématique. ➢ Dans cette section, nous essayons de résoudre un tel problème. Profil de solution illustrant la catastrophe de gradient Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 37
Catastrophe de gradient ➢ L'exemple ci-dessus (gauche) illustre une famille de caractéristiques se rapprochant de plus en plus au fil du temps, de sorte qu'elles forment une onde de compression. ➢ Le cas contraire est une famille de caractéristiques s'éloignant de plus en plus les unes des autres sans aucune intersection; une telle onde est appelée une onde d'expansion. Onde de compression Onde d'expansion Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 38
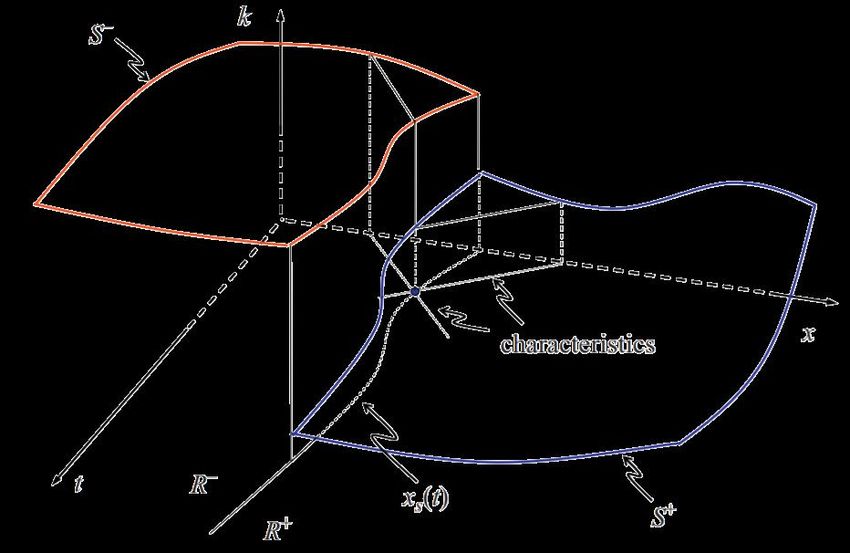
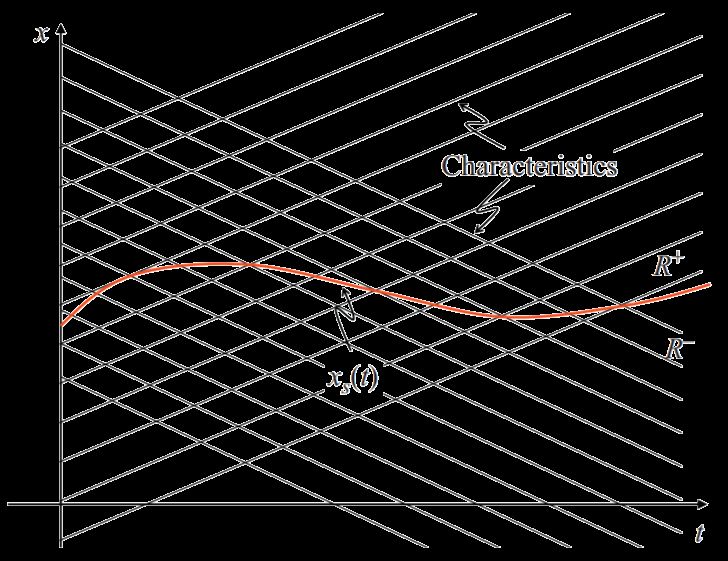
Ondes de choc la solution a plusieurs valeurs ➢ si deux caractéristiques se croisent, la solution à l'intersection aura plusieurs valeurs. ➢ Cependant, si l'on autorise la discontinuité à l'intersection, il est possible de construire une solution lisse par morceaux. ➢ La figure illustre une telle solution où la courbe ( ) dans le plan − est une collection d'intersections de caractéristiques. ➢ La solution reste constante le long de chaque caractéristique et se termine à leur intersection. ➢ Par conséquent, la courbe divise l'espace de solution en deux parties − et + et, par conséquent, sépare la solution en deux parties lisses − and + . ➢ La chute ou discontinuité de à la courbe dénote un changement brusque de qui crée une onde de choc. ➢ Une telle solution lisse par morceaux (piecewise smooth solution) de l'équation différentielle partielle (EDP) est appelée solution d'onde Solution par morceaux - Onde de choc de choc. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 39
Ondes de choc ➢ Une étape critique dans la solution de l'onde de choc est de trouver la courbe ( ) qui relie les intersections de caractéristiques. ➢ Puisque la courbe représente les emplacements auxquels une onde de choc se forme, une telle courbe est appelée le chemin des ondes de choc (shock path). Solution par morceaux - Onde de choc ➢ Dans la figure, deux familles de caractéristiques sont illustrées où une caractéristique peut avoir plusieurs intersections. ➢ Par conséquent, de nombreuses courbes peuvent être dessinées en connectant différents ensembles d'intersections et donc, ➔ l'onde de choc peut emprunter des chemins différents. Chemin des ondes de choc (shock path). Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 40
Ondes de choc ➢ Heureusement, la loi de conservation sous-jacente garantit qu'un seul chemin de choc est valide, et un tel chemin de choc doit satisfaire une condition physique appelée condition de saut Rankine-Hugonoit (Rankine-Hugonoit jump condition): Solution par morceaux - Onde de choc Où : • / est la pente du chemin de choc, • = ( ) tel que défini dans la loi de conservation, • ( , − ) prend la valeur du côté − , • ( , + ) prend la valeur du côté + , • et une notation similaire s'applique à ( , − ) et ( , + ). ➢ Par conséquent, si une ou plusieurs intersections sur la courbe ( ) sont connues, on peut construire le chemin du choc en partant des points connus et en suivant la pente définie ci-dessus. Chemin des ondes de choc (shock path). Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 41
Ondes de choc Exemple ➢ Résoudre la loi de conservation avec la condition initiale suivante en utilisant la méthode des ondes de choc: Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 42
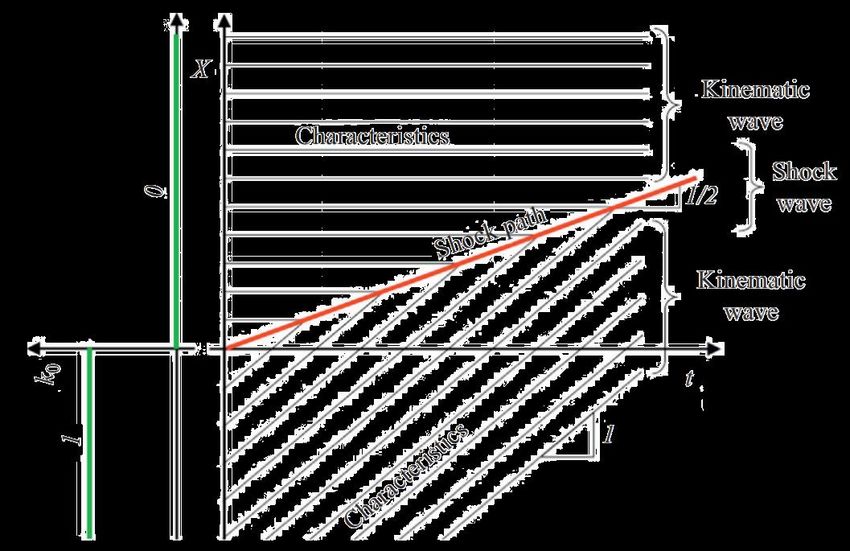
Ondes de choc Problème: Solution ➢ La pente des caractéristiques est = / = ➢ Par conséquent, les caractéristiques tracées en dessous de x = 0 sont des droites parallèles avec une pente = = 1 ➔ = 1/2 2 = 1/2 ➢ De même, les caractéristiques tracées au-dessus de = 0 sont des lignes horizontales avec une pente = 0. Elles portent = 0, et donc = 0. ➢ L'origine est un point connu sur la trajectoire du choc. Selon la condition de saut de Rankine-Hugonoit, la pente du chemin du choc est: ➢ Par conséquent, la trajectoire du choc est une ligne droite qui part de l'origine avec une pente constante 1/2—c'est-à-dire: Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 43
Ondes de choc Solution ➢ Par conséquent, la solution est: ➢ La solution est illustrée sur la figure. ➢ Certains concepts abordés précédemment sont illustrés: ➢ Une caractéristique est une ligne le long de laquelle la solution reste constante; ➢ Une onde cinématique est une famille de caractéristiques droites et parallèles, et une onde de choc sépare deux ondes cinématiques avec un changement brusque de la valeur ; ➢ Un chemin de choc est la projection des emplacements de choc sur le diagramme − . Illustration de la solution Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 44
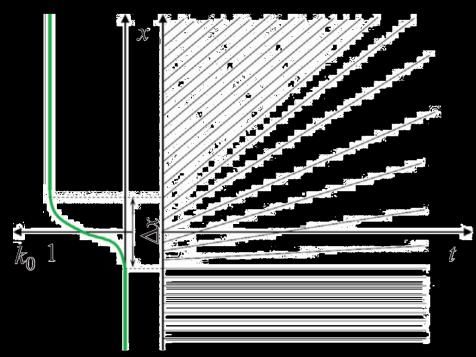
Ondes de raréfaction ➢ Si la condition initiale de l'exemple ci-dessus est inversée, les deux familles de caractéristiques s'éloignent de plus en plus, laissant une zone vide entre les deux familles. ➢ Les caractéristiques de cette EDP sont représentées sur la figure. ➢ Puisqu'une caractéristique porte une solution constante, les zones remplies par les caractéristiques auront des solutions. ➢ Une zone vide dans l'espace de solution signifie qu'il n'y a pas de solution dans cette zone. ➢ Pour résoudre ce problème, il devrait y avoir un moyen de remplir la zone vide avec des caractéristiques. Caractéristiques sans intersection Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 45
Ondes de raréfaction Caractéristiques ➢ Si l’on relax la fonction échelon de la condition initiale en supposant que 0 sans intersection varie progressivement de 0 à 1 sur une petite distance ∆ , les pentes des caractéristiques dessinées en ∆ augmenteront progressivement de 0 à 1 de sorte que tout point de l'espace de solution est rempli par une et une seule caractéristique. Remplir une zone vide avec des ➢ Pour revenir à la fonction échelon de la condition initiale, on prend la limite caractéristiques ∆ → 0. ➢ Maintenant, la zone vide est remplie d'un éventail de caractéristiques tirées de l'origine. Si l'on coupe l'espace de solution avec quelques lignes = 0 , 1 , 2 , …, avec 0 passant l'origine et d'autres plans par conséquent Une onde de raréfaction à des instants ultérieurs, on obtient un développement temporel de la solution comme le montre la figure. Notez que le profil de la solution se raréfie au fil du temps. Par conséquent, cet éventail de caractéristiques représente une onde de raréfaction. Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 46
Références ➢ May, A. D. (1990). Traffic flow fundamentals. ➢ Gartner, N. H., Messer, C. J., & Rathi, A. (2002). Traffic flow theory-A state-of-the-art report: revised monograph on traffic flow theory. ➢ Ni, D. (2015). Traffic flow theory: Characteristics, experimental methods, and numerical techniques. Butterworth-Heinemann. ➢ Kessels, F., Kessels, R., & Rauscher. (2019). Traffic flow modelling. Springer International Publishing. ➢ Treiber, M., & Kesting, A. (2013). Traffic flow dynamics. Traffic Flow Dynamics: Data, Models and Simulation, Springer-Verlag Berlin Heidelberg. ➢ Garber, N. J., & Hoel, L. A. (2014). Traffic and highway engineering. Cengage Learning. ➢ Elefteriadou, L. (2014). An introduction to traffic flow theory (Vol. 84). New York: Springer. ➢ Victor L. Knoop (2017), Introduction to Traffic Flow Theory, Second edition ➢ Serge P. Hoogendoorn, Traffic Flow Theory and Simulation ➢ Nicolas Saunier, Course notes for “Traffic Flow Theory – CIV6705” ➢ Mannering, F., Kilareski, W., & Washburn, S. (2007). Principles of highway engineering and traffic analysis. John Wiley & Sons. ➢ Haight, F. A. (1963). Mathematical theories of traffic flow (No. 519.1 h3). Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 47
Alizadeh H. (2021) École Polytechnique de Montréal– CIV6705 Automne 2021 48
Vous pouvez aussi lire