Tour d'horizon scientifique et industriel des véhicules terrestres autonomes et leurs défis - V. Cherfaoui - R. Chapuis - JNRR 2013, Annecy
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Tour d'horizon scientifique et industriel des
véhicules terrestres autonomes
et leurs défis
V. Cherfaoui – R. Chapuis
1
Sommaire
Enjeux
Perception et analyse de scène
Localisation et cartographie
Plannification / commande
Conclusion
2
I – les enjeux
3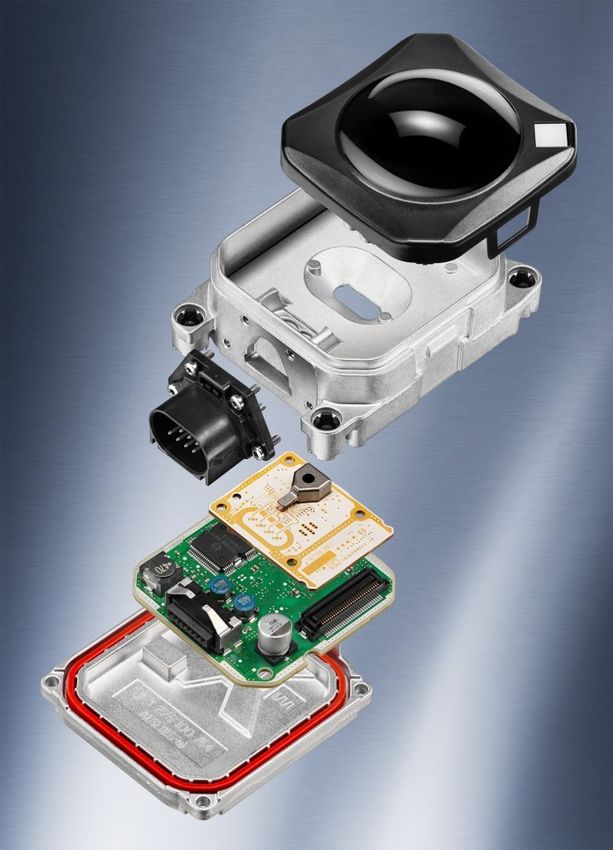
Le véhicule autonome
Pourquoi aujourd'hui le véhicule autonome 1 ?
La voiture est moins synonyme de plaisir qu'hier !
Elle est aujourd'hui perçue comme une contrainte (coût, temps,
pollution, insécurité)
Des signes qui ne trompent pas : co-voiturage, auto-partage,...
Il est vu comme un secteur incontournable
Participe à des offres alternatives de transport (taux remplissage des
véhicules < 30% de leur capacité1)
Le diktat des normes et des "étoiles" des organismes
évaluateurs2 :
Sécurité des occupants, des piétons,
Réduction énergétique (31% consommation énergie finale)*
Réduction des rejets polluants (27% des émissions globales)
1
http://www.automobile-propre.com 5
2
http://euroncap.com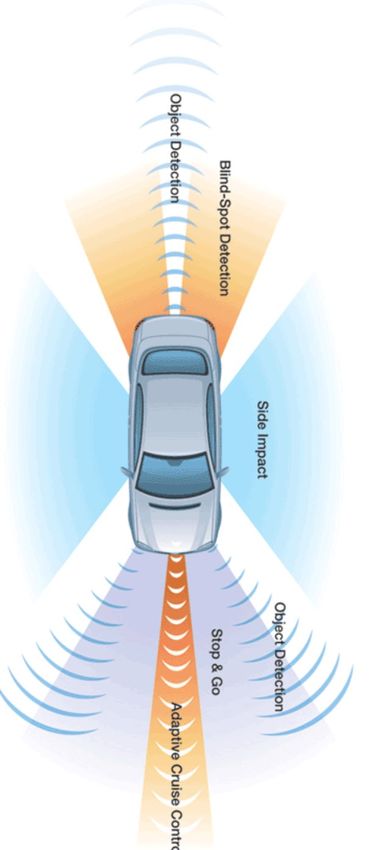
Les projets "Laboratoires"
80's :
quelques dates
travaux univ. Munich (VAMORS), EUREKA, DARPA :
+/- conduite assisté à 60km/h hors trafic,...
90's :
94 : VAMP : univ Munich + Demler : consuite +/- automatique sur autoroute
(130km/h)
95 : NAVLAB : CMU : voiture semi-autonome route et chemins sur 5000km
96 : projet ARGO (Univ. Parme) : 1600km 90% automatique
2000's
2004-2005 : Darpa Grand Challenge
2007 : Darpa Urban Grand Challenge
2010 : VisLab intercontinental Challenge : Parme – Shanghaï
2010 : la Google Car
2012 : VisLab BRAiVE (déplacement en 100%
automatique centre ville de Parme) 6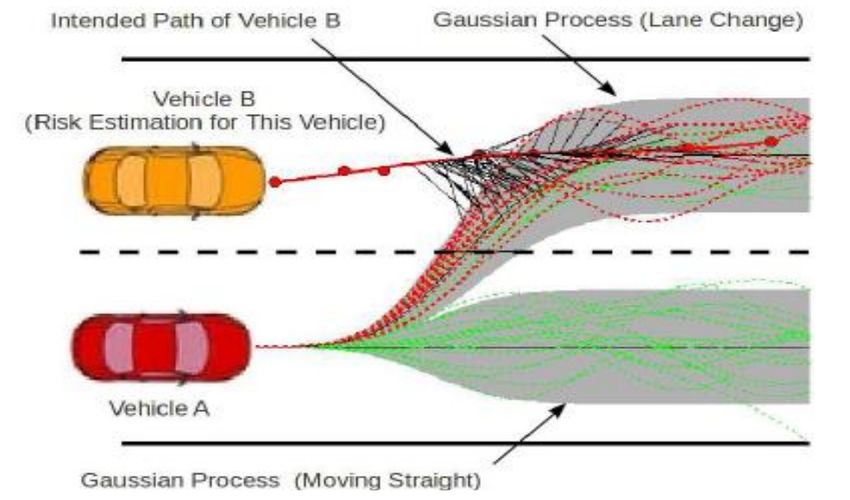
Les projets récents : exemple
lancée oct en 2010,
La Google Car
déployé sur 6 Toyota Prius,
1 Audi TT, 3 Lexus RX450h,
mars 2012 : expérimentation
montrant Steve Mahan
(95% aveugle) allant
automatiquement faire des courses (une personne à côté avec
ordinateur sur les genoux)
Assez convaincant pour faire que l'état du Nevada attribue un
"permis de conduire" au véhicule
aout 2012 : Google annonce qu'ils ont fait environ 500 000km
environ 150 000 US$ d'équipement
Doit faire environ 3 passages préalables
7
Les projets récents
Projet CMU SRX
Projet CMU : conduite automatique mais sans capteur apparent
Véhicule : Cadillac SRX :
2011 : conduit automatiquement 50km
Résultats montrés sur grande route
uniquement
8
Les projets récents :
VisLab / BRAiVE 1
Juillet 2013 : déplacement en 100% automatique dans le centre
ville de Parme
Instrumentation
http://www.braive.vislab.it/equipment.php
1 9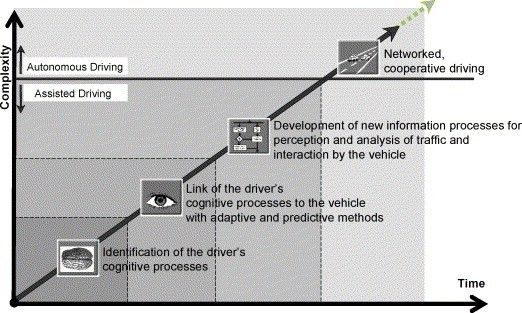
Les projets chez les constructeurs
Beaucoup de constructeurs automobiles expérimentent des prototypes
de véhicule automatiques :
General Motors, Ford, Mercedes-Benz, Volkswagen, Audi, Nissan,
Toyota, BMW, Volvo, Cadillac, ...
En général les constructeurs privilégient l'approche "évolution des
ADAS"
ABS -> ACC"The-> AICC -> ESP ->of
realization assistance à la détectionDrive
the Autonomous d'obstacle ->
system
freinage d'urgence (AEB) -> Aide parking -> Parking automatique ->
évitement is one of our
d'obstacles greatest
-> navigation goals, because Zero
autonome
Fatalities stands alongside Zero Emissions as
L'idée générale est d'éliminer les "erreurs conducteur" (90% des causes
major objective
d'accident aujourd'hui 1 of Nissan's
) pour environ 2020. R&D."
Mitsuhiko Yamashita (VP R&D NISSAN)
10
http://www.gizmag.com/volvo-autonomous-cars/28161/
1
Quelques projections...
2013 : Mercedes propose option de conduite automatique, accélération , freinage, jusqu'à
200km/h à la fois au milieu de trafic et sur autoroute (200km/h)
2013 : BMW : conduite automatique, freinage, accélération dans le trafic à 40km/h
2014 : Volvo : véhicule autonome à 50km/h même dans trafic intense
2015 : Audi : idem
2015 : Cadillac : "super cruise" : idem à plus haute vitesses
2015 : Nissan envisage mise sur le marché d'un véhicule autonome sur route, avec
parking totalement automatique.
2016 : Tesla met au point son prototype couvrant 90% de distance en automatique
2016 : Mobileye prévoit de distribuer des technologies permettant la conduite
entièrement automatique
2018 : Google : idem
2020 : Volvo promet que les passagers de ses voitures seront à l'abir des accidents
2020 : GM, Daimler, Audi, Nissan et BMW prévoient de vendre des véhicules autonomes...
14Véhicules autonomes :
soutien en France et en Europe
France :
• Les labos impliqués dans les projets “véhicules autonomes”
• Institut Pascal, Heudiasyc, IRCCyn, IEF, Xlim, UTBM…
• INRIA (Emotion, lcare, lagadic, imara)
• LIVIC
• Caor
• Pôles de compétitivité Moveo, Véhicule du futur, I-trans…
• ANR Transports Terrestres Durables puis Transport Durable
et Mobilité : peu de projets sur les véhicules17autonomes.Véhicules autonomes :
soutien en France et en Europe
Equipex Robotex : achat de voitures
électriques et automatisées (Zoe- Renault,
Apogée) par plusieurs laboratoires
Institut IEED VeDeCoM : Véhicule Décarboné
et Communicant et Mobilité : délégation de
conduite (modes de déplacements
automatisés)
Programme “Véhicule du futur” des
investissements d’avenir (AMI :01/12/2014)
•le développement de nouvelles solutions techniques innovantes sur
l’articulation véhicule / service / infrastructure et sur les véhicules
autonomes ou automatiques”
34 plans industriels du ministère du
redressement productif :
-Véhicules à pilotage automatique
18Véhicules autonomes :
soutien en France et en Europe
Allemagne
de nombreux projets portés par les universités, les instituts et les
constructeurs.
Ex Equipes Darpa Challenge,
CognitiveCar
simTD
Roadmap “the cognitive car” RWTH Aachen, 2004.
IV 2011 Baden Baden –Démonstrateurs
19Véhicules autonomes :
soutien en France et en Europe
Europe - recherche
•FP7-ICT : IP CVIS, SafeSPOT, PREvent, Coopers, …
•Horizon20201 : “Safe & Integrated Mobility”
Safety (Active, passive & integrated safety)
Road Automation (cooperation with the iMobility Forum)
Driver-Vehicle Dialogues
Cloud-Integrated Vehicles
Cooperative Vehicles
Fluid Vehicle Traffic
EuroNCAP2:
Attribue une note aux véhicule : max 5 étoiles
Forte pression sur les constructeurs, ex 2014 : Automatic Emergency Braking
Research & Innovation : Roadmaps for The EUCAR Strategic Pillar: Safe & Integrated Mobility”
1
http://euroncap.com
2
20Et les constructeurs français dans
tout ça?
PSA :
intégration d’ADAS avec actions sur le véhicule
pas de conduite entièrement automatisée avant
2020.
Renault :
est en train de développer des projets en
interne.
21II - Perception et analyse de scène
22Les capteurs de perception
But : comprendre l'environnement autour du véhicule :
Tout bouge !
Aujourd'hui deux écoles
Traditionnelle : tout est à faire : de la donnée vers
l'exploitation haut niveau
+ Maîtrise de toute la chaîne
+ Fusion possible à tous les niveaux de la chaîne
- beaucoup de temps à passer pour chaque modalité capteur
Approche un peu délaissée par les constructeurs sauf pour
l'extraction directes des données (caméra de recul...)
Capteur "boîte noire" (smart sensors)
approche adoptée par la plupart des constructeurs
à partir de "smart sensors" : capteurs intelligents développés par les
équipementiers 23Les caméras
Mono : universellement utilisées
Technologies CCD ou CMOS
CCD : très bon recul mais en perte de vitesse aujourd'hui
dû aux Inconvénient : blooming, smearing,,
CMOS
prix faibles pour bas de gamme
Pas d'effet Blooming / smearing
Effet de rolling shutter pour entrée de gamme
Approches Stéréo
On a la distance !
... de près
De plus en plus de solutions intégrées
Bomblebee2 de Point Grey
Le choix des constructeurs :
les moins chères => CMOS, Rolling Shutter, faible résolution, objectifs plastiques
simples...
Approche stéréo utilisée par quelques constructeurs : Subaru, Lexus, Mercedes,24
Bosch.Les caméras "intelligentes"
"Smart Sensor"
Le fabriquant le plus connu : Mobileye
L'idée est d'intégrer du traitement
au plus près du capteur
Avantages :
Brique de base
Ne pas se préoccuper des données
brutes
Inconvénients
Boîte noire
Aucun retour possible sur la donnée brute
La caractérisation est difficile pour les étapes ultérieures de fusion
27Les télémètres
Les LIDAR : délaissés par les constructeurs automobiles ...
Intérêt pour les domaines agricole et militaire !
De nouvelles technologies de capteurs télémétrique arrivent sur le marché :
caméra TOF
Kinect
Intérêts
Swiss ranger
Pas d'organes mécaniques
Moins fragile que les LIDAR
Prix susceptibles de baisser beaucoup
Densité supérieure aux LIDAR pour prix équivalent
Fréquence de rafraichissement très supérieure
Savoir-faire LIDAR transférable immédiatement
Inconvénients
Mesures proches pour l'instant,
Réservé très souvent à l'indoor
30
Evolutions vers l'extérieur en cours et prometteusesRadar automotive
Radar LRR3 Bosch
Technologie FMCW, 24 à 77GHz
Systèmes intégrés statiques
Fournit données haut niveau
Grandes diversité applicative
Source : FreeScale
32Capteurs pour faire quoi ?
Détection, reconnaissance des obstacles
Détection / reconnaissance : piétons, véhicules, vulnérables...
Approches télémétriques et radar bien adaptées pour la détection,
mais pas pour la reconnaissance
Approches visuelles très prometteuses tant pour la détection que
pour la reconnaissance / classification (méthodes à noyau, SVM,
Adaboost, sac de mots, ...) :
+ Bonnes performances générales,
- Très sensibles à la richesse de l'apprentissage
Reconnaissance faciale par
algorithme Viola-Jones Reconnaissance de piétons par adaboost et 34
Ondelettes de HaarCapteurs pour...
Suivi des obstacles
But : gestion des pertes ponctuelles et occultations, localisation des
obstacles
Il existe des approches de suivi de motifs image (Mean-Shift
(Shen95), MST (Kanade12), TLD (Kala10), ESM (Malis07), ...),
Exemple suivi véhicule ESM
Les approches MTT (Multi Targets Tracking)
GM-CPHD
commencent à être généralisées (JPDA (Bar Shalom),
MHT (Blackmann04), xxPHD (Mahler07)
35Capteurs
Détection, reconnaissance, suivi : verrous
Verrous pour les véhicules autonomes : la variabilité des scènes
Éclairement, orientation des objets, déformation des objets
Occultations
Mouvements, flous
Le suivi peut gérer quelques situations mais pas toutes !
Gestion des occultations pour filtres MTT (Lamard12)
L'interprétation des scène passera probablement par une
analyse de plus haut niveau faisant intervenir l'ensemble des
acteurs dela scène 36Analyse de scène et calcul du
risque de collision
Contexte
Driver in the loop
Pas de planification de trajectoire de
l’égo-véhicule
38Analyse de scène et calcul du
risque de collision
Contexte
Driver in the loop
Pas de planification de trajectoire de
l’égo-véhicule
Prédiction de trajectoires et calcul de risque de collision
Prise en compte des états successifs des obstacles et de l’égo-véhicule
Prise en compte des règles de conduite et de la structure de la route
Prise en compte du comportement conducteur 39Prédiction de trajectoire
Prédiction basée sur la reconnaissance de manœuvres
Apprentissage des manœuvres élémentaires (change voie, va
tout droit, tourne à droite, tourne à gauche) puis HMM
Utilisation de la courbe de la route
(T. Hulnhagen et. Al 2010) (Berthelot et al., 2011) 40
(Schubert et al., 2008) (Houenou et al 2012) (S. Lefevre 2012)Calcul du risque de collision
Risque de collision à quelques secondes
- Propagation de l’incertitude
- échantillonnage de la période de prédiction
- Calcul du risque par MC
(A. Houeou 2013)
(C. Tay 2009) (41
A. Lambert 2008)Prise en compte du comportement
conducteur
Intention du conducteur : estimée à partir des états observés
successifs (HMM)
Prévision : estimée à partir des intentions et des règles de trafic
(Xi, Z., Levinson, D., 2006) ( S. Lefevre 2012)
(Trivedi et al. 2010) 42Verrous analyse de scène et risque
• Nécessité d’avoir une information sur la route pour mieux
prédire les trajectoires : L’utilisation de cartes numériques peut
améliorer cette connaissance
• Problème difficile si on ne connait pas les intentions des
conducteurs (ego-véhicule et obstacles).
• Dans le contexte des véhicules autonomes :
• Problème simplifié si la trajectoire de l’ego-véhicule est planifiée,
• Si les véhicules sont communicants et envoient leur trajectoire : c’est
encore mieux
• Mais ….obstacles non coopératifs dont les trajectoires sont difficiles à
prédire :piétons et 2-roues
43III- Localisation et cartographie
44Se localiser : pourquoi faire ?
Le but de la localisation : se localiser... par
rapport à une carte (même très simple comme
les bords d'une route)
Des approches absolues / locales
La localisation est un élement clé de la
conduite autonome
Permet de "déplacer" le problème de l'analyse
de la scène
45Les systèmes de
positionnement absolu
on en est où ?
Mise en Précision Nb Couverture Détenteur
service Satellites
GPS 1994 - 2000 10m 30 Monde USA
GLONASS 1996 - 2011 3m 29 Monde Russie
Beidou-2 / 2012 (2020) 10m 30 (35) Asie Chine
Compass Australie
(monde)
GALILEO 2020 10m 4 (30) Monde Europe
Augmentation satellitaire
Système Couverture
complété
WAAS GPS Amérique Nord
EGNOS GALILEO – Europe
GLONASS
47Localisation inertielle
But : se localiser par rapport à un repère galiléen
On distingue
Les accéléromètres IMU Landins (Xsea)
Les gyroscopes
Les gyromètres Microstrain IMU
L'ensemble est fréquemment intégré dans
des "centrales inertielles"
Plusieurs technologies (gyrolaser, FOGS, MEMS, ...) Gyrolaser Safran
Les technologies MEMS ont permis de généraliser l'emploi des
ces capteurs à bas cout :
Rappel : tous les systèmes inertiels dérivent
48Localisation locale
De nombreuses techniques liées au contexte
Localisation par rapport à bord de voie
Localisation pour l'évitement d'obstacles,
Localisation sur carte pré-établie (par SLAM par exemple)
...
Les approches de type SLAM
SLAM LIDAR (souvent dédié intérieur)
SLAM Vision (mono, stéréo, ...)
SLAM Radar
SLAM Radar
(Vivet11) BundleSLAM (Royer10)
50Fusion pour la localisation
La fusion a pour objectif d'améliorer la précision, la disponibilité,
l'intégrité de la localisation.
Couplages lache ou serré (selon accessibilité donnée capteur) assez
"simple" entre loc absolue et inertielle mais...
Couplage localisation absolu / local : non trivial
Référentiels différents
Dérive des approches SLAM
Approche de plus en plus utilisée : exploitation explicite des
cartes pour la localisation
Contrainte sur la fct de vraisemblance de localisation
Approche top-down de sélection / focalisation sur les primitives de
la carte
Localisation guidage
par sélection / focalisation
Tessier07 55Pourquoi la Google Car est en
avance?
Maîtrise des cartes + capteur dense
“…Prebuilt navigation maps indicate static infrastructure, such as telephone
poles, crosswalks, and traffic lights, which enables software to quickly identify
moving objects, like pedestrians and cyclists. “ Graham Murdoch
Au moins 3 passages pour construire les cartes
- améliore le positionnement
- facilite la détection des objets mobiles
57
(Google , Velodyne)Les cartes pour les véhicules
intelligents
Cartes dédiées à l’aide à
la navigation et calcul
d’itinéraires
Topologie
OSM
Informations sémantiques
intéressantes
Modèles 3D urbains
Précision de l’ordre de 10 cm
Surface roulable
IGN 58Les cartes pour les véhicules
intelligents
Véhicules intelligents
Les cartes pour planifier un
itinéraire, une trajectoire
Les cartes pour se localiser
Les cartes pour mieux
percevoir et prédire les
trajectoires
Local dynamic map Projet59
SAFESPOTLes cartes pour se localiser
Enrichissement de la carte
avec des amers géo-
référencés
Ex : avec les marquages au sol
détectés par vision (Zui 2012)
Précision :
60Les cartes pour se localiser
Utilisation de l’empreinte
des bâtiments + lidar
Précision : 40cm, 2°
61Les cartes pour mieux percevoir
et/ou prédire les trajectoires
62
(Moras 2012)Exemple : représentation de la route
1) Linear graph (macro-scale topology / geometry) 2) Linear graph (micro-scale topology / geometry)
3) Niveau 2 +traffic rules 4) Graphe des surfaces (échelle micro + règles de trafic)
63
Source IGN, projet PREDIMAPLes cartes pour les véhicules
intelligents
Source IGN 64Verrous carte
• Disponibilité des cartes, formats compatibles avec
l’embarqué et le temps-réel
• Mises à jour des cartes
• par plusieurs opérateurs : véhicules collecteurs,
cartographes, cadastre, capteurs embarqués, etc… :
nécessité de standardisation
• Plus les cartes sont enrichies et plus elles ont précises, plus
la mise à jour est nécessaire.
• Evolution des bases de données spatio-temporelles.
65Les véhicules communicants
Communication inter-véhicule : V2V
Communication véhicules infrastructure : V2I
Consortium européen :
Technologie
Services
Projets
Verrous
66Les technologies du V2x
Norme 802.11p (EU)
- extension du standard sans
fil 802.11 aux véhicules.
Portée de 600m environ
- ITS Band 5,9 GHz (EU)
Ex : 0.6 s /message/véhicule
Routage et Diffusion
- Geocast, IPv6
- Broadcasting, multihop,…
Acteurs
Labos et instituts de recherche
Sociétés d’autoroutes et
équipementiers
Construteurs
Opérateurs télécoms
Handbook on intelligent vehicle, ch 45 “ Vehicular
67
Communications Requirements and Challenges” Scott AndrewsLes fonctions visées
Sécurité
Perception augmentée
Localisation coopérative,
Conduite coopérative
Alertes, Météo,…
Trafic
Evaluation du trafic,
Contrôle
Réduction du CO2
Service aux passagers
68 EucarQuelques verrous
• Limitation de la bande passante et réseaux
dynamiques
• Perte de messages, perte de chemins : algorithmes répartis
• Dissémination des données (choix du contenu des messages, fréq.,… )
• Compromis C2I-C2C
• Confidentialité, Protection de la vie privée
• Sécurité dans les réseaux ad hoc
S1
,p
op ositi
• Gestion de la confiance dans les noeuds i ni o on
n1 2
(protection attaques, noeuds malveilllants)
M, position1 S1 R2, position5
opinion1 opinion2
• Gestion de la confiance dans les messages
(qualité de l’information reçue) M R2 R1
S S3
2
S2, position3 S3, position4
Ex: Attaque Sybil
Regular Messages 69 opinion1 opinion1
Fake MessagesQuelques verrous
Source SEVECOM
Méthodes classiques
- Chiffrement, clés publiques
- Certificat à court terme
- Révocation
Nécessité d’avoir une connexion infrastructure
Approches algorithmique répartie:
• Algorithmes auto-stabilisants permettant d’être robuste à
certaines erreurs
• Fusion de données distribuée : Gestion des cycles, risque de
“data incest” 70Bilan véhicules communicants
Très soutenu par l’Europe + gros projets nationaux :
• Safespot, CVIS, Drive C2x, Sevecom,
• Scoref, SimTD etc…
Standardisation : protocoles, format des messages….
Source d’information intéressante dans le cadre des véhicules
autonomes :
- envoi des poses successives et de la trajectoire planifiée…
- envoi de l’intention du conducteur
Pas encore d’applications grande échelle en V2V
- SimTD : 120 véhicules équipés : test du carrefour intelligent avec
communications V2I
71IV- Planification et commande
Une autre fois peut-être ...
73V- Conclusion ...
encore beaucoup de questions...
mais ...
Handbook of Intelligent Vehicles
(Springer 2013)
74Quelles recherches après
la Google car ?
La technologie rend elle caduque les nouveaux
développements fondamentaux ?
Quels verrous scientifiques reste-t-il à lever ?
Comment garantir que les systèmes respectent une
certaine sûreté de fonctionnement ?
Quel partage avec le conducteur et quelles interfaces
homme-machine ?
Les véhicules communicants et coopératifs apportent-ils
une réelle plus-value ?
Comment doit on intégrer les nouvelles potentialités des
cartes ?
75Conclusion
7678
Vous pouvez aussi lire