Vision - gamma system - MACHINE LEARNING
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

gamma
RIELLO ELETTRONICA
system
Vision
Lorsque lasecurity
Where sécurité rencontre
meets le
®
MACHINE LEARNING
Fonc onnalité du système DIATVision -
Le disposi f DIATVision est un système de vision et de contrôle intelligent u lisé pour surveiller
une zone de travail spéci que.
À l’intérieur de la zone surveillée, le système est en mesure de détecter la présence de masses
(objets ou personnes) et, grâce à l’intelligence ar cielle, il permet de déterminer s’il s’agit de
personnes ou d’objets génériques.
À l’intérieur de toute la zone surveillée, il est possible d’iden er plusieurs zones (actuellement
jusqu’’à un maximum de 3) avec de niveaux di érents de fonc onnement (par exemple : alarme,
blocage).
Le système consiste d’une ou de plusieurs caméras (en fonc on du type de surveillance ou des
dimensions de la zone à surveiller), qui surveillent la zone, et d’une unité centrale (capable de
gérer jusqu’à 2 caméras) pour le traitement des images et la dé ni on de fonc onnement
(dé ni on de la zone ou des zones à surveiller ; caractéris ques opéra onnelles).
L’adop on de disposi fs auxiliaires (par exemple: lasers, codeurs, marqueurs) permet de modi er
dynamiquement la profondeur des zones surveillées (en pra que, il est possible que les zones
surveillés se modi ent en fonc on du posi onnement de la machine). Le choix du type de
disposi f auxiliaire à u liser est dicté par les éléments soumis à surveillance, tels que type,
dimension, distance, vitesse de mouvement.
fi
ti
ti
ti
ti
ti
fi
ti
ti
fi
ti
ti
ff
ti
fi
ti
ti
ti
ti
ti
fi
ti
fi
ti
ti
ti
fi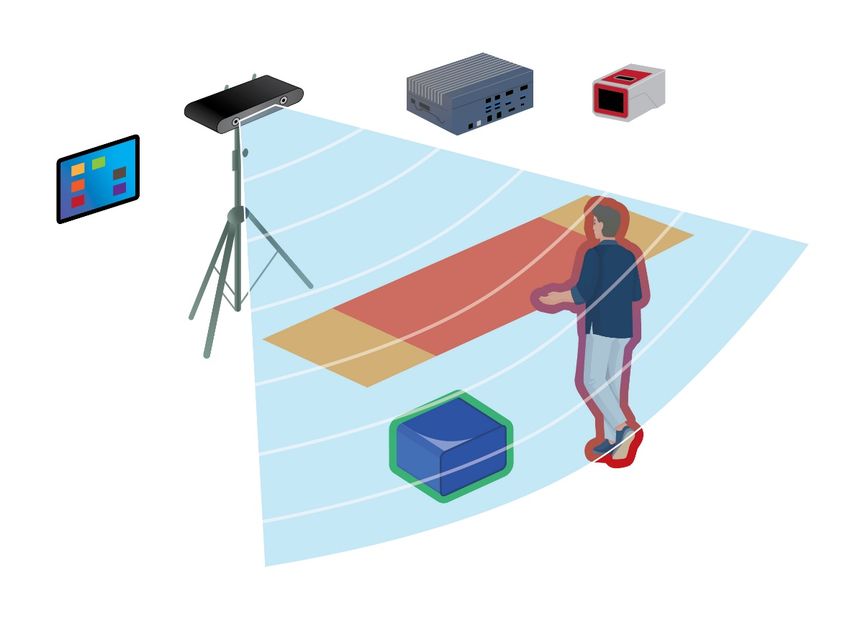
La caméra doit être installée à l’avant de la zone à surveiller et à une hauteur et une inclinaison
préétablies par des paramètres spéci és au moyen d’un con gurateur logiciel qui dé nit ces
paramètres sur la base de la zone ou des zones à surveiller.
Les zones peuvent être traitées selon trois con gura ons:
1. Une seule Zone centrale (Fig. 1): en face de la caméra, de façon symétrique par rapport au
plan central de la caméra.
Fig. 1
fi
fi
ti
fi
fi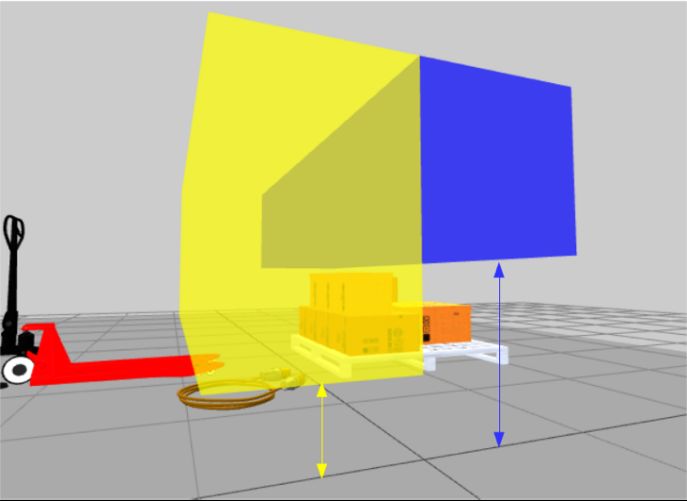
2. Deux Zones, à gauche et à droite (Fig. 2): l’une des deux zones poten ellement dynamiques
en profondeur.
Fig. 2
3. Trois Zones – une zone centrale et deux zones latérales (par exemple : couloirs de passage)
(Fig. 3): côté gauche et côté droit de la zone centrale.
Fig. 3
ti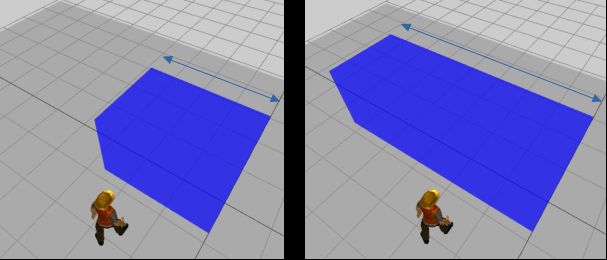
La hauteur maximale de surveillance est la même pour toute la zone sous surveillance, mais pour
chaque zone (actuellement jusqu’à un maximum de trois), il est possible de con gurer de
paramètres divers, tels que:
1. Profondeur: distance maximale de la caméra (gérée de façon dynamique pour la zone
centrale) et séparément pour la zone centrale et les zones latérales.
Fig. 4
2. Largeur, symétrique par rapport au plan de la ligne médiane de la caméra, côté gauche et
côté droit.
Fig. 5
3. Hauteur minimale du sol qui peut être con gurée séparément pour la zone centrale et les
deux zones latérales. Ce e informa on permet de prévoir les seuils du sol qui doivent être
exclus de la surveillance en raison du fait qu’ils sont surs (pédalier, presse-étoupe, etc.)
tt
ti
fi
fi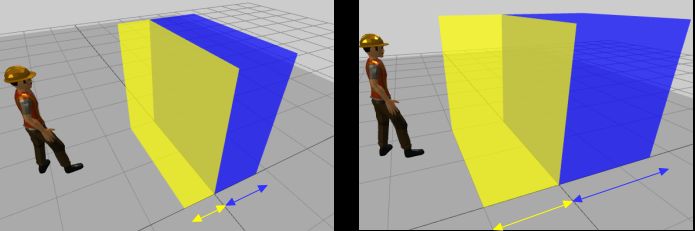
Fig. 6
La possibilité de subdiviser la zone surveillée en plusieurs zones et de détecter la distance et le
posi onnement (si nécessaire) d’éléments spéci ques dans la “scène surveillée” permet d’u liser
le système DIATVision dans plusieurs domaines:
• Machines industrielles: mouvement le long d’un corps central (par ex:: machine pour la
transforma on du bois)
• Bras robo sés qui, en bougeant , “envahissent” maintenant une zone et maintenant une
autre.
De plus, le système est en mesure de détecter le nombre de personnes qui sta onnent dans les
zones surveillées; cela permet de signaler la présence de personnes en excès qui dépassent un
seuil dé ni (paramètre con gurable) ainsi que de détecter si une personne se trouve
simultanément dans deux zones (centrale et latérale) ou dans une seule zone (fonc on u le, par
exemple, pour éviter le « chevauchement » en cas de machines industrielles).
DIATVision fournit un jeu de signaux de sor e (Fig.7-8-9) qui seront traités par le système Hôte
pour générer les évènements opportuns : (ralen ssement et/ou arrêts manuels, signalisa ons
acous ques, etc… Ces signaux peuvent être dis ncts tant sur la base de la zone dans laquelle le
système détecte une présence anomale, que sur la base de la nature de la détec on (personne ou
objet).
Le disposi f gère les anomalies du système intérieur mais il st aussi en mesure de détecter si l’une
des caméras a été frauduleusement modi ée par rapport à l’orienta on et/ou aux inclinaisons de
la même.
ti
ti
fi
ti
ti
ti
fi
fi
ti
ti
fi
ti
ti
ti
ti
ti
ti
ti
ti
Données techniques
CONFIGURATION MINIMUM • 1 caméra
• 1 unité de contrôle
• Câble d’alimenta on u.c.
• Jeu de câbles de raccordement caméra (longueur
standard)
OPTIONS • 1 ge réglable en hauteur et inclinaison
Jeu de câbles de raccordement caméra (longueur
supérieure au standard)
PARAMÈTRES PHYSIQUES Détec on de la hauteur et de l’inclinaison de la caméra, par
D’INSTALLATION logiciel qui u lise des paramètres tels que : champ
d’applica on, volume et nombre de zones à surveiller, etc.
Champ de vision maximum FOV: 110° x 70° max.
(1 caméra)
Inclinaison caméra Da 0° a 30 °
Zone maximum / minimum Largeur : environ 250 cm. Avec la caméra située à 100 cm. de
contrôlable (1 caméra) l’objet surveillé
Hauteur : 180-220 cm.
Profondeur : 50 cm. – 10 m.
Nombre maximum de zones 3 (possibilité 1 zone dynamique par rapport aux autres zones en
contrôlées adoptant le disposi f auxiliaire)
Nombre maximum de caméras 2
connectables par unité de
contrôle
Temps de réponse >= 220 ms.
Résolu on caméra 720p
Dimension minimum de 20 cm.
l’obstacle
Distance maximum entre la 10 m.
caméra et l’unité de contrôle
(par câble USB 3.0)
Alimenta on 9-36V (unité de contrôle)
Température de service Unité de contrôle : de 0 à 50°C
Caméra: De -10°C à +45° (de 14°F à 113°F)
Degré de protec on Caméra : IP66
Système opéra onnel Linux, Mac, Windows
Sor es sta ques (Nbe.) 6 (par caméra)
Interfaces I/O Sor es sta ques numériques
ti
ti
ti
ti
ti
ti
ti
ti
ti
ti
ti
ti
ti
tiU.C: CE & FCC class A (EN61000-6-4/-6-2)
• EMI
• EMS IEC 61000-4-2 (ESD, contact: ±4kV, air: ±8kV avec/ extension)
IEC 61000-4-3 (RS, 10V/m de 80-1000MHz, 3V/m de
1400-2000MHz, 1V/m de 2000-2700MHz, 1kHZ onde
sinusoÏdale, 80% AM)
IEC 61000-4-4 (EFT, ±2kV à 5KHz sur port d’alimenta on, ±1kV
at 5KHz sur port de signal)
IEC 61000-4-5 (Surtension, ±2kV ligne à terre CM sur port
d’alimenta on, ±1kV ligne à terre CM sur port de signal) IEC
61000-4-6 (CS, 10Vrms avec 1kHz onde sinusoÏdale,, 80% AM de
0,15MHz-80MHz)
IEC 61000-4-8 (champs magné ques alimenta on- fréquence)
IEC 61000-4-11 (Chutes de tension (DIPs) & interrup on de
tension)
Caméra : • EN 55032/AC :2016et EN 50561-1/AC :2015
• EN IEC 61000-3-2 :2019
• Directive CEM (2014/30/EC)
• EN 61000-3-3 :2014
• RoHS (2011/65/EU)
• EN 62368-1 :2014
• Directive BT 2006/95/EC
maintenant 2014/35/UE
ti
ti
ti
ti
tiVous pouvez aussi lire