Caractéristiques du produit - IRB 390
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
ROBOTICS Caractéristiques du produit IRB 390
Trace back information: Workspace 21B version a5 Checked in 2021-05-27 Skribenta version 5.4.005

Caractéristiques du produit
IRB 390 - 15/1300
IRB 390 - 10/1300
IRC5
ID du document: 3HAC066568-004
Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.
Les informations contenues dans ce manuel peuvent être modifiées sans préavis et
ne doivent pas être interprétées comme un engagement de la part d'ABB. La
responsabilité d'ABB ne sera pas engagée par suite d'erreurs contenues dans ce
manuel.
Sauf stipulation expresse du présent manuel, aucune des informations ne pourra
être interprétée comme une garantie d'ABB couvrant les risques de perte, de
dommages corporels ou matériels, l'adaptation à un usage particulier ou toute autre
garantie que ce soit.
En aucun cas, la responsabilité d'ABB ne pourra être engagée à la suite de dommages
fortuits ou liés à l'utilisation du présent manuel ou des produits décrits dans le manuel.
Le présent manuel ne doit pas être reproduit ou copié, intégralement ou en partie,
sans l'autorisation écrite d'ABB.
À conserver pour référence ultérieure.
D'autres exemplaires de ce manuel peuvent être obtenus auprès d'ABB.
Traduction de la notice originale.
© Copyright 2020 - 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.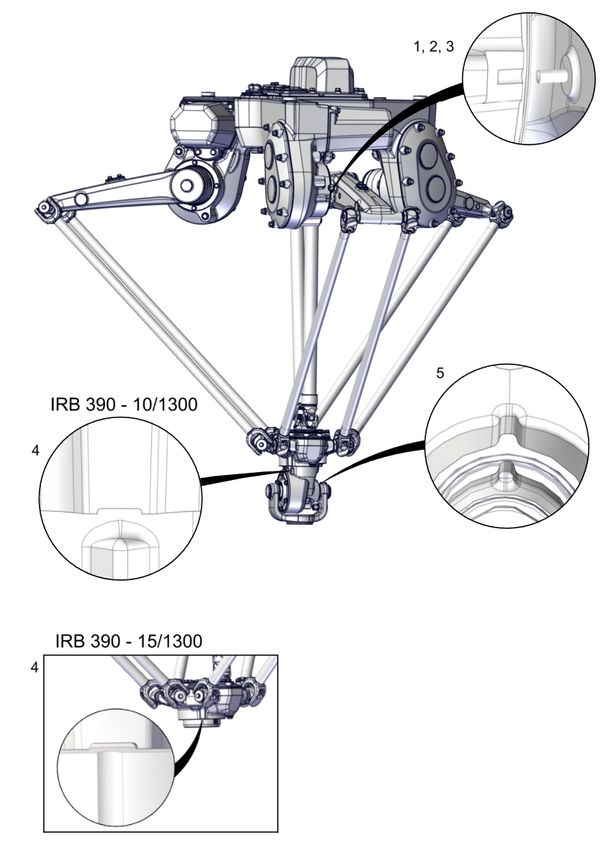
Table des matieres
Table des matieres
Vue générale de ce manuel .............................................................................................................. 7
1 Description 9
1.1 Structure ......................................................................................................... 9
1.1.1 Introduction concernant la structure ........................................................... 9
1.1.2 Les différentes versions du robot ............................................................... 11
1.1.3 Définition de la désignation de la version ..................................................... 12
1.1.3.1 Caractéristiques techniques .......................................................... 12
1.2 Normes de sécurité ........................................................................................... 16
1.2.1 Normes applicables ................................................................................. 16
1.3 Installation ....................................................................................................... 18
1.3.1 Présentation de l'installation ...................................................................... 18
1.3.2 Conditions d'exploitation .......................................................................... 19
1.3.3 Montage du manipulateur ......................................................................... 20
1.3.4 Type de lubrification des réducteurs .......................................................... 24
1.4 Étalonnage et références .................................................................................... 26
1.4.1 Méthodes d'étalonnage ............................................................................ 26
1.4.2 Étalonnage précis ................................................................................... 27
1.4.3 Repères de synchronisation et sens du mouvement d'axe .............................. 28
1.4.3.1 Repères de synchronisation et position de synchronisation des axes .... 28
1.4.3.2 Sens du mouvement d'étalonnage de tous les axes ........................... 29
1.5 Diagrammes des charges ................................................................................... 30
1.5.1 Introduction ............................................................................................ 30
1.5.2 Diagrammes des charges ......................................................................... 31
1.5.3 Accélération TCP maximale ...................................................................... 34
1.6 Montage de l'équipement sur le robot (dimensions du robot) ..................................... 35
1.7 Maintenance et dépannage ................................................................................. 42
1.8 Mouvements du robot ........................................................................................ 43
1.8.1 Rayon d’action ....................................................................................... 43
1.8.2 Performances conformes à la norme ISO 9283 ............................................. 45
1.9 Temps de cycle classiques ................................................................................. 47
1.9.1 Présentation des temps de cycle classiques ................................................. 47
2 Spécifications des variantes et options 49
2.1 Présentation des variantes et options ................................................................... 49
2.2 Manipulateur .................................................................................................... 50
2.3 Câbles au sol ................................................................................................... 53
2.4 Application ....................................................................................................... 54
3 Accessoires 55
3.1 Introduction aux accessoires ............................................................................... 55
Index 57
Caractéristiques du produit - IRB 390 5
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.
Cette page a été volontairement laissée vierge
Vue générale de ce manuel
Vue générale de ce manuel
A propos de ce manuel
Ce manuel contient les instructions relatives aux opérations suivantes :
• l'installation mécanique et électrique du robot,
• la maintenance du robot,
• la réparation mécanique et électrique du robot.
Utilisation
Ce manuel doit être utilisé lors de :
• au cours de l'installation, depuis la phase de levage du robot vers son site
de travail et sa fixation dans la fondation jusqu'à sa préparation afin qu'il
puisse fonctionner,
• au cours de la maintenance,
• au cours des travaux de réparation et d'étalonnage.
Public visé
Ce manuel est destiné au(x) :
• personnel d'installation,
• personnel de maintenance
• personnel de réparation.
Conditions préalables
Un responsable de maintenance, de réparation ou d’installation travaillant sur un
robot ABB doit :
• être formé par ABB et disposer des connaissances requises en mécanique
et en électricité suffisantes pour assurer le travail d’installation, de
maintenance et de réparation.
Références
Les documents auxquels ce manuel fait référence sont répertoriés dans le tableau
ci-dessous.
Nom du document ID du document
Manuel du produit, pièces détachées - IRB 390 3HAC066567-004
Manuel du produit - IRB 390 3HAC066566-004
Manuel du produit - IRC5 3HAC021313-004
Manuel de référence technique - Paramètres système 3HAC050948-004
Manuel de référence technique - Lubrification des réducteurs 3HAC042927-004
Circuit diagram - IRB 390 3HAC060545-009
Material/product safety data sheet - Battery pack 3HAC043118-001
Suite page suivante
Caractéristiques du produit - IRB 390 7
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.Vue générale de ce manuel
Suite
Révisions
Révision Description
A Première édition.
B Publié dans la version 21A. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Modifications mineures.
C Publié dans la version 21B. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Mise à jour du texte relatif à la qualité de la fixation.
• Mise à jour de la description générale de la section consacrée
aux diagrammes de charge.
8 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction concernant la structure
1 Description
1.1 Structure
1.1.1 Introduction concernant la structure
Famille de robots
Le nouveau robot IRB 390 FlexPacker™ peut prendre en charge le conditionnement
personnalisé, l’emballage vertical et le tri à haute vitesse et à haute variation et le
picking de commande sur demande dans les centres logistiques et les centres de
traitement des commandes d’e-commerce.
Le robot IRB 390 FlexPacker sera disponible comme une variante de robot à quatre
et cinq axes. Il est 35 % plus rapide que le IRB 360-8/1130 FlexPicker, avec une
augmentation de 45 % du niveau réalisable et une inertie de charge utile jusqu’à
15 kg.
Conçu pour les clients des domaines de l’alimentation & des boissons, de la
logistique, des produits pharmaceutiques et des produits de consommation
emballés, le modèle IRB 390 est la solution idéale pour le conditionnement
secondaire et des applications à charge utile supérieure. Grâce à sa vitesse et à
sa flexibilité, il est capable de prendre en charge les applications d’emballage Prêt
à vendre et Prêt à l’emploi.
Système d'exploitation
Le robot est équipé du système de commande IRC5 et du logiciel de commande
du robot, RobotWare. RobotWare prend en charge tous les aspects du système
de robot, notamment le contrôle des mouvements, le développement et l'exécution
des programmes applicatifs, la communication, etc. Voir Caractéristiques du
produit - Controller IRC5 with FlexPendant.
Sécurité
Les normes de sécurité concernent le robot, le manipulateur et le système de
commande complets.
Fonctionnalités complémentaires
Pour les fonctionnalités complémentaires, le robot peut être équipé d'un logiciel
optionnel de prise en charge applicative - fonctions de communication -
communication réseau - et de fonctions avancées telles que les commandes
multitâche, de détection, etc. Pour avoir une description du logiciel optionnel, voir
Caractéristiques du produit - Controller software IRC5.
PickMaster ® est un logiciel d'application spécifique, dédié au picking assisté par
vision avec des convoyeurs haute vitesse. Il offre ne programmation orientée tâche
et l'exécution d'opérations rapides de prise et de pose à flux aléatoire à la volée.
Voir Caractéristiques du produit - PickMaster Twin.
Suite page suivante
Caractéristiques du produit - IRB 390 9
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction concernant la structure
Suite
Conformité hygiénique
Toutes les surfaces exposées sont conformes aux réglementations FDA relatives
au contact alimentaire fortuit. Les réducteurs sont lubrifiés avec une huile de qualité
alimentaire des lubrifiants de qualité NSF-H1 (les lubrifiants H1 sont des lubrifiants
de qualité alimentaire utilisés dans les environnements de transformation
alimentaire, où un contact alimentaire fortuit est possible.) Toutes les graisses
utilisées derrière les joints exposés, et les graisses de service recommandées,
sont des matériaux compatibles NSF-H1
Axes du robot
xx2000000006
Rep Description Rep Description
1 Axe 1 2 Axe 2
3 Axe 3 4 Axe 4
5 Axe 5
10 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.2 Les différentes versions du robot
1.1.2 Les différentes versions du robot
Généralités
Le modèle IRB 390 est disponible dans deux versions différentes.
Types de robot
Les différents types de robot standard suivants sont disponibles :
Type de robot Capacité de manutention (kg)
IRB 390-15/1300 15 kg
IRB 390-10/1300 10 kg
Caractéristiques du produit - IRB 390 11
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
1.1.3 Définition de la désignation de la version
1.1.3.1 Caractéristiques techniques
Poids, robot
Le tableau indique le poids du robot.
Modèle de robot Masse
IRB 390 IRB 390 - 15/1300: 133 kg
IRB 390 - 10/1300: 148 kg
Remarque
Le poids n’inclut pas les outils et autres équipements installés sur le robot !
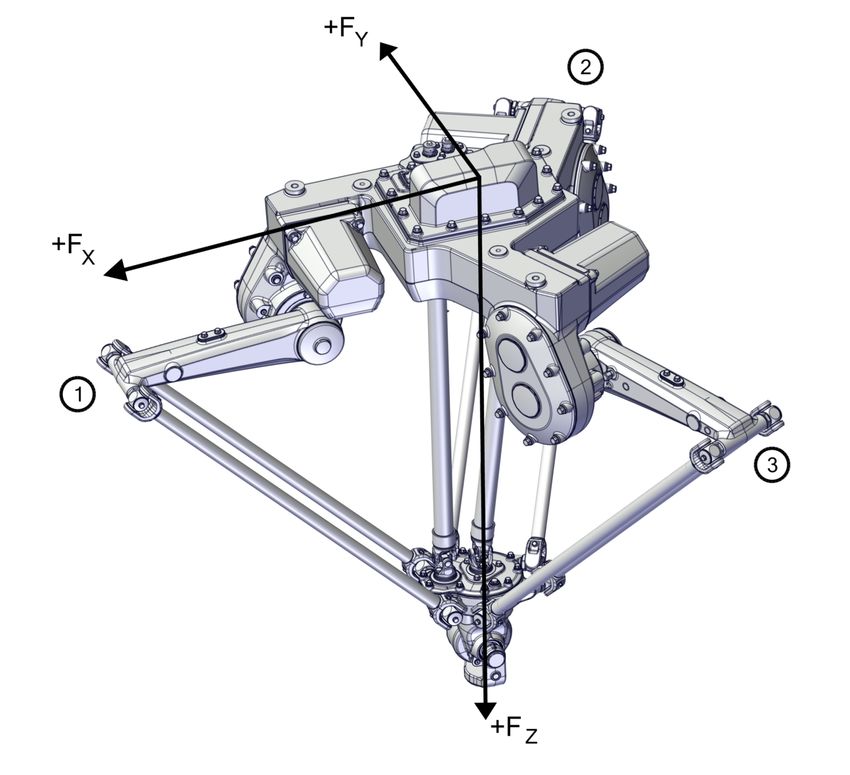
Charges sur la fondation, robot
xx2000000862
Le tableau ci-dessous indique les forces et couples exercés sur le robot au cours
de divers types de fonctionnement.
Remarque
Ces valeurs de forces et de couples sont extrêmes et rarement atteintes en cours
de fonctionnement. Les valeurs n’atteignent également jamais leur maximum en
même temps.
Suite page suivante
12 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
AVERTISSEMENT
L'installation du robot est limitée aux options de montage indiquées dans les
tableaux de charges suivants.
Suspendue dans le cadre du robot
Force Charge d'endurance (en fonctionne- Charge maximale (arrêt d'urgence)
ment)
Force xy ±1,8 kN ±4,0 kN
Force z 1,4 ± 0,6 kN 1,4 ± 1,9 kN
Couple xy 2,0 kNm 4,3 kNm
Couple z 0,6 kNm 1,2 kNm
Exigences, fondation
Le tableau ci-dessous indique les exigences auxquelles doit répondre la fondation
supportant le poids du robot installé :
Exigences Valeur Remarque
Platitude de la surface 0,3 mm Les fondations planes offrent une meilleure ré-
de fondation pétabilité de l'étalonnage du résolveur par rap-
port aux paramètres originaux lors de la livraison
d'ABB.
La valeur du nivellement est définie selon les
points d'ancrage de la base du robot.
Inclinaison maximum 0°
Fréquence de résona- 35 Hz La valeur est recommandée pour une performa-
nce minimum nce optimale.
Re- En raison de la rigidité de la fondation, prenez
marque en compte l’équipement dans la masse du ro-
Le fait d’avoir bot. i
une fréquence de Pour des informations liées à la compensation
résonance plus des flexibilités de fondation, voir Application
faible que celle manual - Controller software IRC5, rubrique
recommandée Mode de processus des mouvements.
peut affecter la
durée de vie du
manipulateur.
i La fréquence de résonance minimale donnée doit être interprétée comme la fréquence de la
masse/inertie du robot, le robot supposé rigide, lorsqu’une élasticité translationnelle/torsionnelle
de la fondation est ajoutée, p. ex. la rigidité du piédestal sur lequel le robot est monté. La fréquence
de résonance minimale ne doit pas être interprétée comme la fréquence de résonance du bâtiment,
du sol, etc. Par exemple, si la masse équivalente du sol est très élevée, cela n’affectera pas le
mouvement du robot, même si la fréquence est bien inférieure à la fréquence déclarée. Le robot
doit être monté aussi rigide que possible sur le sol.
Les perturbations des autres machineries affecteront le robot et la précision de l’outil. Le robot
possède des fréquences de résonance dans la zone de 10-20 Hz et les perturbations dans cette
plage seront amplifiées, bien qu’amorties quelque peu par le servo-contrôle. Cela pourrait être un
problème, en fonction des exigences des applications. Si c’est un problème, le robot doit être isolé
de l’environnement.
Suite page suivante
Caractéristiques du produit - IRB 390 13
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Conditions d'entreposage, robot
Le tableau ci-dessous indique les conditions d'entreposage préconisées pour le
robot :
Paramètre Valeur
Température ambiante minimale -25°C
Température ambiante maximale 55°C
Température ambiante maximale (moins de 24 h) 70°C
Humidité ambiante maximale 95%
Conditions de fonctionnement, robot
Le tableau ci-dessous indique les conditions de fonctionnement préconisées pour
le robot :
Paramètre Valeur
Température ambiante minimale 0°C i
Température ambiante maximale +50°C
Humidité ambiante maximale 95% à température constante
i À faible température < 10°C, comme pour toute autre machine, une phase de préchauffage est
recommandée. Sinon, le robot risque de s'arrêter ou de fonctionner à faible performance en raison
d'huile et de graisse dont la viscosité dépend de la température.
Classes de protection, robot
Le tableau présente les types de protection disponibles du robot, avec la classe
de protection correspondante.
Type de protection Classe de protection
Manipulateur, type de protection Standard IP67
Autres informations techniques
Données Description Remarque
Niveau de bruit aérien Niveau de pression acous- < 68 dB (A) Leq (conformément à
tique en dehors de l'espace la directive machine 2006/42/UE)
de travail
Consommation électrique typique à la charge utile nominale
Type de mouvement IRB 390 - 15/1300 IRB 390 - 10/1300
Cube ISO 1,25 1,28
Consommation électrique moyenne (kW)
14 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
E1 E2
E4 E3
A
xx1000000101
Rep Description
A 320 mm
Caractéristiques du produit - IRB 390 15
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
1.2 Normes de sécurité
1.2.1 Normes applicables
Remarque
Les normes indiquées sont valides au moment de la publication de ce document.
Les normes abandonnées ou remplacées sont retirées de la liste lorsque cela
est nécessaire.
Généralités
Le produit est conçu conformément à la norme ISO 10218-1:2011, Robots for
industrial environments - Safety requirements -Part 1 Robots, et aux parties
applicables des références normatives, telles que visées dans ISO 10218-1:2011.
En cas d'écarts par rapport à la norme ISO 10218-1:2011, ceux-ci sont répertoriés
dans la déclaration d'incorporation qui fait partie de la livraison du produit.
Règles normatives telles que visées dans la norme ISO 10218-1
Norme Description
ISO 9283:1998 Manipulating industrial robots - Performance criteria and related
test methods
ISO 10218-2 Robots and robotic devices - Safety requirements for industrial
robots - Part 2: Robot systems and integration
ISO 12100 Safety of machinery - General principles for design - Risk as-
sessment and risk reduction
ISO 13849-1:2006 Safety of machinery - Safety related parts of control systems
- Part 1: General principles for design
ISO 13850 Safety of machinery - Emergency stop - Principles for design
IEC 60204-1:2005 Safety of machinery - Electrical equipment of machines - Part
1: General requirements
IEC 62061:2005 Safety of machinery - Functional safety of safety-related elec-
trical, electronic and programmable electronic control systems
Normes et spécifications spécifiques à la région
Norme Description
ANSI/RIA R15.06 Safety requirements for industrial robots and robot systems
ANSI/UL 1740 Safety standard for robots and robotic equipment
CAN/CSA Z 434-14 Industrial robots and robot Systems - General safety require-
ments
Autres normes utilisées pour la conception
Norme Description
ISO 9787:2013 Robots and robotic devices -- Coordinate systems and motion
nomenclatures
Suite page suivante
16 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
Suite
Norme Description
IEC 61000-6-2 Electromagnetic compatibility (EMC) – Part 6-2: Generic stan-
dards – Immunity standard for industrial environments
IEC 61000-6-4 Electromagnetic compatibility (EMC) – Part 6-4: Generic stan-
(option 129-1) dards – Emission standard for industrial environments
ISO 13732-1:2008 Ergonomics of the thermal environment - Part 1
IEC 60974-1:2012 i Arc welding equipment - Part 1: Welding power sources
IEC 60974-10:2014 i Arc welding equipment - Part 10: EMC requirements
ISO 14644-1:2015 ii Classification of air cleanliness
IEC 60529:1989 + A2:2013 Degrees of protection provided by enclosures (IP code)
i Valable uniquement pour les robots de soudage à l'arc. Remplace IEC 61000-6-4 pour les robots
de soudage à l'arc.
ii Uniquement les robots avec protection Clean Room.
Caractéristiques du produit - IRB 390 17
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.1 Présentation de l'installation
1.3 Installation
1.3.1 Présentation de l'installation
Généralités
Le robot IRB 390 est adapté à un environnement industriel normal. En fonction de
la version du robot, il est possible de monter un outil terminal d'un poids maximal
(charge utile comprise) sur la bride de montage du robot (axe 6). Voir Diagrammes
des charges à la page 30.
Charges supplémentaires
Le bras supérieur peut supporter un poids supplémentaire de 0,5 kg.
Limites de la plage de fonctionnement
Le rayon d'action peut être limité uniquement par le logiciel, pas de manière
mécanique. Le client peut définir des limites dans l’espace de travail cartésien si
nécessaire.
18 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.2 Conditions d'exploitation
1.3.2 Conditions d'exploitation
Norme de protection
Variante du robot Norme de protection CEI529
Toutes les variantes, manipulateur IP67
Environnements explosifs
Le robot ne doit pas être placé ou manipulé dans un environnement explosif.
Limitations du rayon d'action
EPS ne pourra pas être sélectionné. Aucune limitation mécanique.
Temprature ambiante
Description Classe de protection Température
Manipulateur avec lubrifica- Norme De + 5°C i (41°F) à + 50°C (122F)
tion de qualité alimentaire
pendant le fonctionnement
i À faible température < 10°C, comme pour toute autre machine, une phase de préchauffage est
recommandée. Sinon, le robot risque de s'arrêter ou de fonctionner à faible performance en raison
d'huile et de graisse dont la viscosité dépend de la température.
Humidité relative
Description Humidité relative
Robot complet pendant le fonctionnement, le transport 95% max. à température constante
et le stockage
Caractéristiques du produit - IRB 390 19
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.3 Montage du manipulateur
1.3.3 Montage du manipulateur
Illustration de l'assemblage
xx2000000683
Ordre d'assemblage
1 Installer l'unité de base.
Remarque
La rondelle de montage (a) et le joint (b) sont emballés séparément pour la
livraison.
2 Déplacer les bras supérieurs en position de synchronisation.
3 Fixer les bras inférieurs aux bras supérieurs.
4 Fixer l’unité delta aux bras inférieurs.
Suite page suivante
20 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.3 Montage du manipulateur
Suite
Ordre d'assemblage
5 Fixer l’unité télescopique.
6 Étalonnez le robot.
Remarque concernant Mxy et Fxy
Le couple de torsion (M xy) peut se produire dans un sens de l'axe du plan XY du
système de coordonnées de base. Ceci s'applique également à la force transversale
(F xy).
Orifices de fixation de la base du robot
Vue du dessus.
1017 1626 24,5°
740
460 B
B
3x 120°
C
C
D
91
°
3x
120
°
xx2000002050
Suite page suivante
Caractéristiques du produit - IRB 390 21
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.3 Montage du manipulateur
Suite
Configuration des trous, base
Cette illustration représente la configuration des trous utilisée pour l'ancrage du
robot.
2 A B
G
60°
G2
0.1 F G
0.1 F G
0.08 J-K
0.08 J-K
3
X
740
3x 120°
X
G3
60
°
65.
5°
24.5°
CL J-K
Z=0
+0.021
3x 30 H7 0
3x 5 0.1
G1 0.1 F G
3x M16 40
0.08 J-K
1
X-X
xx2000000018
1 Réducteur axe -1
2 Réducteur axe -2
3 Réducteur axe -3
A Trous de fixation pour œillets de levage
B Trous de montage du robot
G1, G2, Plan de référence pour chaque réducteur.
G3
Les trois points d'appui du boîtier de base du manipulateur doivent être montés
sur trois surfaces dont la planéité correspond aux spécifications. Utilisez des cales,
si nécessaire.
Reportez-vous aux spécifications dans Exigences, fondation à la page 13.
Suite page suivante
22 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.3 Montage du manipulateur
Suite
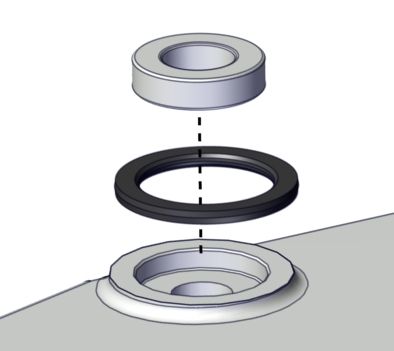
Vis de fixation
Le tableau ci-dessous indique le type de vis de fixation et de rondelles à utiliser
pour l'ancrage du robot dans la fondation.
Vis appropriées M16 acier inoxydable. Longueur minimale
de l’engagement de filetage : 24 mm
Quantité 3 pcs
Qualité Minimum quality: A4-80
Rondelle appropriée 17x15x3 acier inoxydable (3HAC060866-
005)
Distance Rondelle d’écartement: 3HAC070543-001.
Bague d'étanchéité: 3HAC074660-001.
xx2000000260
Compris dans la livraison du manipulateur.
Remplacez-la si elle est endommagée.
Couple de serrage 250 Nm
Exigences en matière de surface plane 0,3 mm
Caractéristiques du produit - IRB 390 23
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.4 Type de lubrification des réducteurs
1.3.4 Type de lubrification des réducteurs
Introduction
Cette section indique où trouver des informations concernant le type de lubrification,
la référence et la quantité de lubrification dans le réducteur spécifique. Elle décrit
également l'équipement nécessaire pour travailler sur la lubrification.
Type et quantité d'huile dans les réducteurs
Les informations sur le type de lubrification, numéro d’article ainsi que la quantité
dans la boîte de vitesses spécifiques sont disponibles dans Manuel de référence
technique - Lubrification des réducteurs pour les utilisateurs enregistrés sur le
portail myABB Business Portal, www.abb.com/myABB.
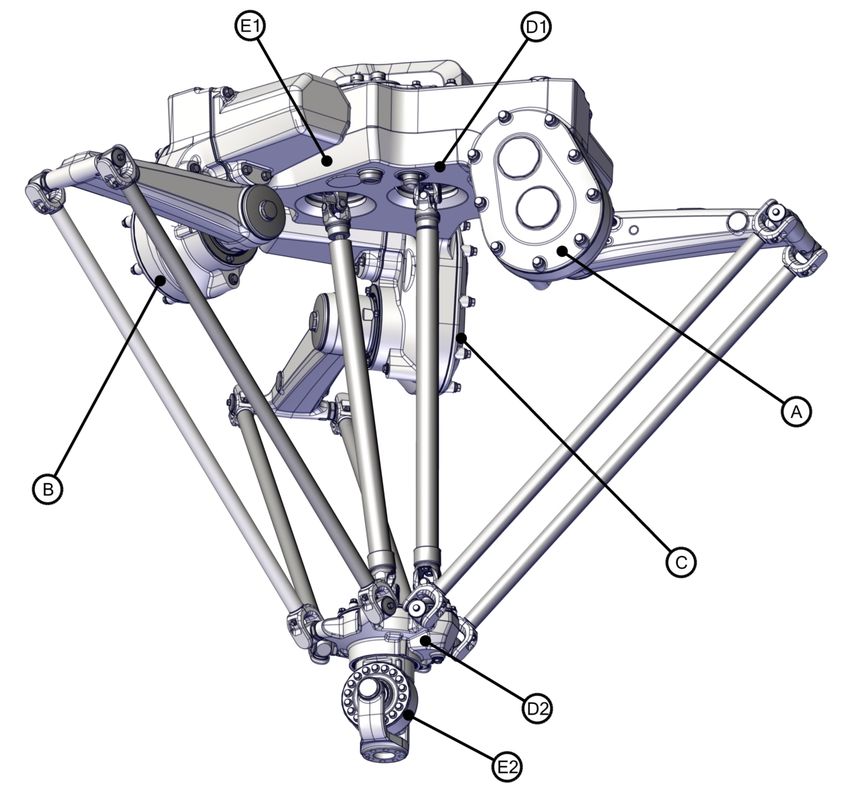
Emplacement des réducteurs
Cette figure illustre l'emplacement des réducteurs.
xx1900000303
A Réducteur Axe 1
B Réducteur Axe 2
C Réducteur Axe 3
D1 Pré-étage réducteur Axe 4
Suite page suivante
24 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.3.4 Type de lubrification des réducteurs
Suite
D2 Réducteur Axe 4
E1 Pré-étage réducteur Axe 5
E2 Réducteur Axe 5
Caractéristiques du produit - IRB 390 25
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.4.1 Méthodes d'étalonnage
1.4 Étalonnage et références
1.4.1 Méthodes d'étalonnage
Vue d'ensemble
Cette section indique les différents types d'étalonnage et les méthodes d'étalonnage
proposées par ABB.
Le manuel du produit contient des informations complémentaires.
Types d'étalonnage
Type d'étalonnage Description Méthode d'étalonnage
Étalonnage stan- Le robot étalonné est placé en position d'éta- Axis Calibration
dard lonnage.
Les données d'étalonnage standard se
trouvent sur la carte SMB (carte de mesure en
série) ou EIB dans le robot.
Pour les robots sous version RobotWare 5.04
ou antérieure, les données de l'étalonnage fi-
gurent dans le fichier calib.cfg fourni avec le
robot à la livraison. Ce fichier identifie la posi-
tion correcte du résolveur/moteur en fonction
de la position de repos du robot.
Brève description des méthodes d'étalonnage
Méthode Axis Calibration
Axis Calibration est une méthode d'étalonnage standard pour l'étalonnage de IRB
390 et c'est la plus précise. C'est la méthode recommandé pour obtenir des
performances correctes.
Les routines suivantes sont disponibles pour la méthode Axis Calibration :
• Étalonnage précis
• Mise à jour des compte-tours
• Reference Calibration
L'équipement d'étalonnage de Axis Calibration est fourni sous la forme d'un jeu
d'outils.
Vous trouverez les instructions relatives à l'exécution de la procédure d'étalonnage
sur le FlexPendant. Il vous guidera, étape par étape, tout au long de la procédure
d'étalonnage.
26 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.4.2 Étalonnage précis
1.4.2 Étalonnage précis
Généralités
L’étalonnage précis s’effectue à l’aide de la méthode d'étalonnage de l’axe (Axis
Calibration).
xx2000000006
Axes
Rep Description Rep Description
1 Axe 1 2 Axe 2
3 Axe 3 4 Axe 4
5 Axe 5
Caractéristiques du produit - IRB 390 27
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.4.3.1 Repères de synchronisation et position de synchronisation des axes
1.4.3 Repères de synchronisation et sens du mouvement d'axe
1.4.3.1 Repères de synchronisation et position de synchronisation des axes
Introduction
Cette section shows indique la position des repères de synchronisation et la position
de synchronisation de chaque axe.
Repères de synchronisation, IRB 390
xx2000000004
28 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.4.3.2 Sens du mouvement d'étalonnage de tous les axes
1.4.3.2 Sens du mouvement d'étalonnage de tous les axes
Vue d'ensemble
Lors de l'étalonnage, l'axe doit être déplacé vers la position d'étalonnage, toujours
dans la même direction, afin d'éviter des erreurs de position causées par un jeu
dans un engrenage, etc. Les directions positives sont représentées sur la figure
ci-dessous.
Les routines de service d’étalonnage gèreront automatiquement les mouvements
d’étalonnage, ceux-ci peuvent être différents des directions positives indiquées
ci-dessous.
Sens du mouvement d'étalonnage et du pilotage manuel
La figure ci-dessous montre les sens positif et négatif de chaque axe ainsi que les
sens linéaires lors du pilotage manuel du robot dans le système de coordonnées
de base.
xx2000000006
Caractéristiques du produit - IRB 390 29
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.5.1 Introduction
1.5 Diagrammes des charges
1.5.1 Introduction
AVERTISSEMENT
Il est primordial de toujours définir les données de charge réelle correctes et de
corriger la charge utile du robot. Des définitions incorrectes des données de
charge peuvent entraîner une surcharge du robot.
Si on utilise des données de charge et/ou s'il s'agit de charges en dehors du
diagramme de charge, les pièces suivantes peuvent être endommagées par une
surcharge :
• moteurs
• réducteurs
• structure mécanique
AVERTISSEMENT
Les robots fonctionnant avec des données de charge incorrectes et/ou des
charges en dehors du diagramme de charge, ne seront pas couverts par la
garantie du robot.
Généralités
Les diagrammes de charge comprennent une inertie de la charge utile nominale.
La valeur J0 pour IRB 390 - 10/1300 est de 0,08 kgm 2 et pour IRB 390 - 10/1300,
elle est de 0,15 kgm 2 . Des charges utiles à haute inertie ont un impact sur la
performance.
L'inertie maximale autorisée autour des axes 5 et 4 est de 2 kgm 2 . La distance
entre l’interface du client et le centre de rotation de l’axe 5 est de 0,097 mètre.
Le IRB 390 peut être utilisé uniquement en suspension au plafond, les autres
orientations ne sont pas autorisées.
30 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.5.2 Diagrammes des charges
1.5.2 Diagrammes des charges
Remarque
Le poids autorisé pour les charges comprend les appareils de préhension, etc.
Il faut utiliser les types de données loaddata et tooldata avec moment
d'inertie !
IRB 390 - 15/1300
0.70
2 KG
0.60
0.50
4 KG
Z-distance (m)
0.40
6 KG
0.30 8 KG
10 KG
12 KG
0.20 15 KG
0.10
0.00
0.00 0.10 0.20 0.30
L-distance (m)
xx2000001805
Suite page suivante
Caractéristiques du produit - IRB 390 31
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.5.2 Diagrammes des charges
Suite
IRB 390 - 10/1300
0.70
0.60
2 KG
0.50
3 KG
Z-distance (m)
0.40
4 KG
0.30
6 KG
0.20 8 KG
10 KG
0.10
0.00
0.00 0.10 0.20 0.30 0.40 0.50
L-distance (m)
xx2000001806
Équipement supplémentaire monté sur les bras du manipulateur
Les charges du bras supérieur doivent être déclarées comme des charges de bras
pour l'articulation 1, 2 et 3 respectivement. La charge supplémentaire sur le
logement delta doit être ajoutée comme une donnée de charge de bras (identifiée
dans RobotWare comme r1_load_4) . Les charges supplémentaires du bras inférieur
peuvent être divisées entre la charge de bras supérieur respective et la charge du
logement delta.
Charge supplémentaire maximale sur le bras 0.5 kg
supérieur
Bras inférieur 0.15 kg
Logement delta 0.5 kg
Suite page suivante
32 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.5.2 Diagrammes des charges
Suite
120
70 40
40
136
Allowed center of gravity
for extra loads on upper arms.
Allowed center of gravity
for extra loads on lower arms.
xx2000002037
Caractéristiques du produit - IRB 390 33
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.5.3 Accélération TCP maximale
1.5.3 Accélération TCP maximale
Accélération de conception cartésienne maximale pour les charges nominales
Type de robot Arrêt d'urgence Mouvement contrôlé
Accélération max. à la charge no- Accélération max. à la charge nomi-
minale COG [m/s 2 ] nale COG [m/s 2 ]
IRB 390-15/1300 99 82
IRB 390-10/1300 141 98
Remarque
Les niveaux d'accélération pour l'arrêt d'urgence et le mouvement contrôlé
comprennent l'accélération due aux forces gravitationnelles. La charge nominale
est définie avec la masse nominale et le CdG avec un décalage max dans Z et
L (voir schéma de charge).
34 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Dimensions du robot
La figure indique la dimension du robot.
La vue A-A est illustrée dans Trous de fixation pour les charges supplémentaires
sur l'unité delta à la page 41.
IRB 390 - 15/1300
808
675
624
350
129
69
425
290 262
380
1463
A A
975
785
xx2000001845
Suite page suivante
Caractéristiques du produit - IRB 390 35
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
IRB 390 - 10/1300
808
675 Z=0
624
350
129
69
425
290 262
380
A A
975
1615
785
104
xx2000001839
La vue A-A est illustrée dans Trous de fixation pour les charges supplémentaires
sur l'unité delta à la page 41.
Suite page suivante
36 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
Interface mécanique de la bride d'outil
22.5° 8 H8 14 30°
6 H8 8
6x M8 12
8x M8 12
8x
45
°
80
6x
63
6
0°
40 H8 12
80
40
56 H8 6,5
100 h8
IRB 390-10/1300 IRB 390-15/1300
xx2000002064
Suite page suivante
Caractéristiques du produit - IRB 390 37
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
Trous de fixation et dimensions pour les charges supplémentaires
Des charges supplémentaires peuvent être montées sur le robot. Les définitions
des dimensions et des masses sont indiquées dans les figures ci-dessous. Le
robot comporte des trous pour le montage d'équipements supplémentaires. La
charge maximale du bras dépend du centre de gravité de la charge du bras et de
la charge utile du robot.
Centre de gravité des charges supplémentaires sur les bras supérieur et inférieur
A
120
70 40
40
136
B
xx2000002341
A Centre de gravité autorisé pour les charges supplémentaires sur les bras supé-
rieurs.
B Centre de gravité pour les charges supplémentaires sur les bras inférieurs.
Suite page suivante
38 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
Trous de fixation pour les charges supplémentaires sur les bras supérieurs
Il existe une série de deux trous M6 situés en haut de chaque bras supérieur, qui
peuvent être utilisés pour fixer l'équipement de fixation. Charge supplémentaire
maximale : 0,5 kg/bras supérieur.
24,5°
3x 120°
30
204
6x M6 17
D
VIEW D
xx2000001847
Suite page suivante
Caractéristiques du produit - IRB 390 39
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
Fixation de charges supplémentaires sur les bras supérieurs
Aucun trou pour le montage de l'équipement supplémentaire n’est disponible sur
les bras inférieurs. Si vous fixez des équipements supplémentaires, utilisez des
blocs de serrage moulés. Des colliers de serrage en plastique peuvent être utilisés
mais ils risquent d'endommager la peinture. N’utilisez pas de métal directement
sur les bras inférieurs : 0,15 kg/bras inférieur.
425
975
xx2000001849
Suite page suivante
40 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.6 Montage de l'équipement sur le robot (dimensions du robot)
Suite
Trous de fixation pour les charges supplémentaires sur l'unité delta
Il existe une série de trois trous M6 situés en haut de l’unité delta qui peuvent être
utilisés pour fixer l'équipement de fixation. Charge supplémentaire maximale sur
l’unité delta : 0,5 kg.
3x
12
0 °
3x M6 9
A A
A-A
xx2000001848
Qualité des fixations
Lors du montage des outils sur la bride d'outil, utilisez uniquement des vis de
qualité 12,9. Pour les autres équipements, utilisez des vis et un couple de serrage
adaptés à votre application.
Caractéristiques du produit - IRB 390 41
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.7 Maintenance et dépannage
1.7 Maintenance et dépannage
Généralités
En cours de fonctionnement, le robot requiert une maintenance minimale. Il a été
conçu pour un entretien aussi simple que possible :
• Des moteurs à courant alternatif ne nécessitant aucun entretien sont utilisés.
• De l'huile est utilisée pour les réducteurs.
• Tous les câbles sont fixés, absence de mouvements. Dans le cas improbable
d'une panne, sa conception modulaire facilite son changement.
Maintenance
Les intervalles de maintenance dépendent de l'utilisation du robot, les tâches de
maintenance nécessaires dépendent également des options choisies. Pour obtenir
des informations détaillées sur les procédures d'entretien, reportez-vous au Manuel
du produit - IRB 390.
42 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.8.1 Rayon d’action
1.8 Mouvements du robot
1.8.1 Rayon d’action
Illustration, rayon d’action IRB 390 - 15/1300
Cette illustration représente le rayon d'action illimité du robot.
Z
Z=0
Y
X
-56°
10°
0°
c
b +90°
a
TCP
d
e 15kg
xx1900001423
Dimensions
Mesure a Mesure b Mesure c Mesure d Mesure e
1 463 mm 1 274 mm 1 063 mm 475 mm 650 mm
Suite page suivante
Caractéristiques du produit - IRB 390 43
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.8.1 Rayon d’action
Suite
Illustration, rayon d’action IRB 390 - 10/1300
Cette illustration représente le rayon d'action illimité du robot.
Z
Z=0
Y
X
-56°
10°
0°
105
Axis 5
c
b
+90°
a
WCP
d
e
xx1900001422
Dimensions
Mesure a Mesure b Mesure c Mesure d Mesure e
1 518 mm 1 329 mm 1 118 mm 380 mm 650 mm
44 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.8.2 Performances conformes à la norme ISO 9283
1.8.2 Performances conformes à la norme ISO 9283
Généralités
Pour une charge nominale et une vitesse de 1,6 m/s sur le plan de test ISO incliné
avec les quatre axes du robot en mouvement, avec une charge utile différente.
Les valeurs du tableau ci-dessous correspondent au résultat moyen des mesures
sur un petit nombre de robots. Le résultat peut varier en fonction de la position du
robot dans le rayon d'action, de la vitesse, de la configuration de bras, du sens
d'approche de la position, du sens de la charge sur le système de bras. Les jeux
dans les réducteurs affectent également le résultat.
Les valeurs pour AP, RP, AT et RT sont mesurées conformément à l'image
ci-dessous.
xx0800000424
Position Description Position Description
A Position programmée E Trajectoire programmée
B Position moyenne durant D Trajectoire réelle à l'exécution du
l'exécution du programme programme
AP Distance moyenne de la posi- AT Ecart maximal entre E et la trajectoire
tion programmée moyenne
RP Tolérance de la position B à RT Tolérance de la trajectoire à l'exécu-
l'exécution répétée du progra- tion répétée du programme
mme
IRB 390 IRB 390 - 15/1300 IRB 390 - 10/1300
Exactitude de pose, AP i (mm) 0.01 0,08
Répétabilité de pose, RP (mm) 0.01 0,08
Temps de stabilisation de pose, PSt (s) jusqu'à 0,1 0.22 1,09
mm de la position
Dépassement de stabilisation de pose, PSo 0.60 0.55
Exactitude de la trajectoire, AT (mm) 0.57 1,53
Répétabilité de la trajectoire, RT (mm) 0.07 0,06
i L’AP, conformément au test ISO susmentionné est la différence entre la position apprise (position
modifiée manuellement dans la cellule) et la position moyenne obtenue pendant l’exécution du
programme.
Suite page suivante
Caractéristiques du produit - IRB 390 45
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.8.2 Performances conformes à la norme ISO 9283
Suite
Jeu axe 4 et 5
Classe de protection Valeur
Standard 20 arcs minute
Vitesse
Direction Description
IRB 390 - 15/1300 5,7 m/s
IRB 390 - 10/1300 5 m/s
46 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.1 Description
1.9.1 Présentation des temps de cycle classiques
1.9 Temps de cycle classiques
1.9.1 Présentation des temps de cycle classiques
Généralités
Les deux cycles comprennent un temps d'activation de l'air de 35 ms pour la prise
et 35 ms pour la dépose. L'activation de l'air a lieu pendant le temps de cycle.
Description des cycles classiques
Le cycle 1 est un mouvement 90 - 400 - 90, avec une rotation de l'axe 4 de 90 degrés.
Le cycle 2 est un mouvement 90 - 700 - 90, avec une rotation de l'axe 4 de 90 degrés.
Temps de cycle approximatives
IRB 390-15/1300
Charge utile 5.0 kg 15.0kg
Cycle 1 0.67 0.79
Cycle 2 0.81 0.96
IRB 390-10/1300
Charge utile 5,0 kg 10,0 kg
Cycle 1 0.74 0.79
Cycle 2 0.90 0.98
Caractéristiques du produit - IRB 390 47
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.Cette page a été volontairement laissée vierge
2 Spécifications des variantes et options
2.1 Présentation des variantes et options
2 Spécifications des variantes et options
2.1 Présentation des variantes et options
Généralités
Les différentes variantes et options du IRB 390 sont décrites dans les sections
suivantes. Les numéros d'options utilisés ici sont les mêmes que ceux utilisés
dans la fiche technique.
Les variantes et options relatives au système de commande du robot sont décrites
dans les caractéristiques de produit du système de commande du robot.
Caractéristiques du produit - IRB 390 49
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.2 Manipulateur
2.2 Manipulateur
Variantes
Option Description
435-140 IRB 390-15/1300
435-141 IRB 390-10/1300
Classe de protection
Option Description
287-4 Standard, IP67
Signes sur le manipulateur
Option Description
334-1 ABB
334-3 AUCUN
Raccordement du résolveur, axe 7
Un connecteur pour les signaux du résolveur de l'axe 7 est situé sur la base.
Option Description
864-1 Sur la base
Lampe de sécurité
Option Description
213-1 Une lampe de sécurité avec un voyant fixe orange peut être montée sur le
châssis du robot. La longueur du câble est de 400 mm. La lampe est active
en mode MOTORS ON.
xx2000002036
Suite page suivante
50 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.2 Manipulateur
Suite
Garantie
Pendant la période sélectionnée, ABB fournira des pièces de rechange ainsi que
de la main d'œuvre pour réparer ou remplacer la partie non-conforme de
l'équipement sans frais supplémentaires. Durant cette période, il est nécessaire
de faire intervenir ABB pour effectuer une Maintenance préventive annuelle
conformément aux manuels ABB. Si, en raison de restrictions du client, aucune
donnée ne peut être analysée dans le module ABB Ability Condition Monitoring &
Diagnostics pour les robots équipés de systèmes de commande OmniCore, et
qu’ABB doit se déplacer jusqu’au site, les frais de déplacement ne sont pas
couverts. La période de garantie étendue commence toujours le jour de l’expiration
de la garantie. Les conditions de la garantie s'appliquent comme défini dans les
conditions générales.
Remarque
La description ci-dessus n’est pas applicable pour l'option Stock warranty [438-8]
Option Type Description
438-1 Garantie standard La garantie standard est de 12 mois à compter de la
date de livraison au client ou au plus tard 18 mois après
la date d'expédition d'usine (selon la première éventua-
lité à survenir). Les conditions générales de la garantie
s'appliquent.
438-2 Garantie standard + 12 Garantie standard étendue 12 mois à compter de la date
mois de fin de garantie standard. Termes de la garantie et
application des conditions. Contactez le service client
en cas d'autres exigences.
438-4 Garantie standard + 18 Garantie standard étendue de 18 mois à compter de la
mois date de fin de garantie standard. Termes de la garantie
et application des conditions. Contactez le service client
en cas d'autres exigences.
438-5 Garantie standard + 24 Garantie standard étendue 24 mois à compter de la date
mois de fin de garantie standard. Termes de la garantie et
application des conditions. Contactez le service client
en cas d'autres exigences.
438-6 Garantie standard + 6 Garantie standard étendue 6 mois à compter de la date
mois de fin de garantie standard. Termes de la garantie et
application des conditions.
438-7 Garantie standard + 30 Garantie standard étendue 30 mois à compter de la date
mois de fin de garantie standard. Termes de la garantie et
application des conditions.
438-8 Garantie de stock Le début de la garantie standard peut être différé de
maximum 6 mois, à partir de la date d'expédition
d'usine.Veuillez noter qu'aucune réclamation ne sera
acceptée pour les garanties qui ont eu lieu avant la fin
de la garantie de stock. La garantie standard commence
automatiquement après 6 mois à compter de la date
d'expédition d'usine ou à partir de la date d'activation
de la garantie standard dans WebConfig.
Remarque
Des conditions spéciales sont applicables ; voir les dire-
ctives de garantie robotique.
Suite page suivante
Caractéristiques du produit - IRB 390 51
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.2 Manipulateur
Suite
Remote Service activé
Option Description
890-4 Connected Services 3G
890-5 Connected Services WiFi
52 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.3 Câbles au sol
2.3 Câbles au sol
Câble du manipulateur - longueur
Option Description
210-1 3m
210-2 7m
210-3 15 m
210-4 22 m
210-5 30 m
Caractéristiques du produit - IRB 390 53
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.2 Spécifications des variantes et options
2.4 Application
2.4 Application
Module d'extension
Option Type Description
768-1 Petite armoire vide Voir Caractéristiques du produit - Controller IRC5
with FlexPendant
768-2 Grande armoire vide Voir Caractéristiques du produit - Controller IRC5
with FlexPendant
715-1 Kit d'installation Voir Caractéristiques du produit - Controller IRC5
with FlexPendant
54 Caractéristiques du produit - IRB 390
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.3 Accessoires
3.1 Introduction aux accessoires
3 Accessoires
3.1 Introduction aux accessoires
Généralités
De nombreux outils et équipements sont spécialement conçus pour le manipulateur.
Logiciels de base/options logicielles du robot et du PC
Pour plus d’informations, reportez-vous aux sections Caractéristiques du
produit - Système de commande IRC5 et Caractéristiques du produit - Controller
software IRC5.
PickMaster et système de vision
Pour plus d'informations, reportez-vous au Caractéristiques du produit - PickMaster
Twin.
Caractéristiques du produit - IRB 390 55
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.Cette page a été volontairement laissée vierge
Index
Index L
lubrification
quantité dans les réducteurs, 24
A type de lubrification , 24
ancrage du robot dans la fondation, vis de fixation, 23
M
C mise en place, équipement, 35
caractéristiques techniques
montage, équipement, 35
robot, 12
charges sur la fondation, 12 N
classes de protection, 14 normes, 16
conditions d'entreposage, 14 ANSI, 16
conditions de fonctionnement, 14 CAN, 16
couples sur la fondation, 12 EN IEC, 16
EN ISO, 16
D normes de sécurité, 16
dimensions
normes des produits, 16
robot, 35
direction des axes, 29 O
directions négatives, axes, 29 options, 49
directions positives, axes, 29
P
E poids, 12
équipement, robot, 35 position d'étalonnage
équipement supplémentaire, 35 graduations, 28
étalonnage
type standard, 26 R
exigences sur la fondation, 13 Rayon d’action du
robot, 43
F réducteurs
fondation emplacement des, 24
exigences, 13 repères d'étalonnage, 28
repères de synchro, 28
G robot
garantie, 51
caractéristiques techniques, 12
garantie de stock, 51
classe de protection, 14
garantie standard, 51
dimensions, 35
graduations d'étalonnage, 28
équipement, mise en place, 35
graduations sur le robot, 28
rayon d’action, 43
H types de protection, 14
huile
quantité dans les réducteurs , 24
T
température ambiante
type d'huile , 24
entreposage, 14
humidité
fonctionnement, 14
entreposage, 14
températures
fonctionnement, 14
entreposage, 14
humidité ambiante
fonctionnement, 14
entreposage, 14
type de protection, 14
fonctionnement, 14
V
I variantes, 49
installation
équipement, 35
Caractéristiques du produit - IRB 390 57
3HAC066568-004 Révision: C
© Copyright 2020 - 2021- ABB. Tous droits réservés.ABB AB
Robotics & Discrete Automation
S-721 68 VÄSTERÅS, Sweden
Telephone +46 (0) 21 344 400
ABB AS
Robotics & Discrete Automation
Nordlysvegen 7, N-4340 BRYNE, Norway
Box 265, N-4349 BRYNE, Norway
Telephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.
Robotics & Discrete Automation
No. 4528 Kangxin Highway
PuDong District
SHANGHAI 201319, China
Telephone: +86 21 6105 6666
ABB Inc.
Robotics & Discrete Automation
1250 Brown Road
Auburn Hills, MI 48326
USA
Telephone: +1 248 391 9000
abb.com/robotics
3HAC066568-004, Rev C, fr
© Copyright 2020 - 2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.Vous pouvez aussi lire