DS6 - Système Hybrid Synergy Drive de la PRIUS
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
MPSI Sciences de l’Ingénieur
DS6 – Système Hybrid Synergy Drive
de la PRIUS 1
I Présentation
Dans le contexte actuel d’économie des énergies fossiles et de réduction des émissions de gaz nocifs,
le système de propulsion hybride constitue une alternative intéressante à la propulsion classique par
moteur thermique seul car il permet de réduire la consommation.
La spécificité de la solution retenue sur la Toyota Prius consiste
à:
• Exploiter le moteur thermique à son rendement optimal sur
route ;
• Ne pas polluer en ville ;
• Récupérer en partie l’énergie du véhicule lors du freinage.
Figure 1 : Prius de Toyota
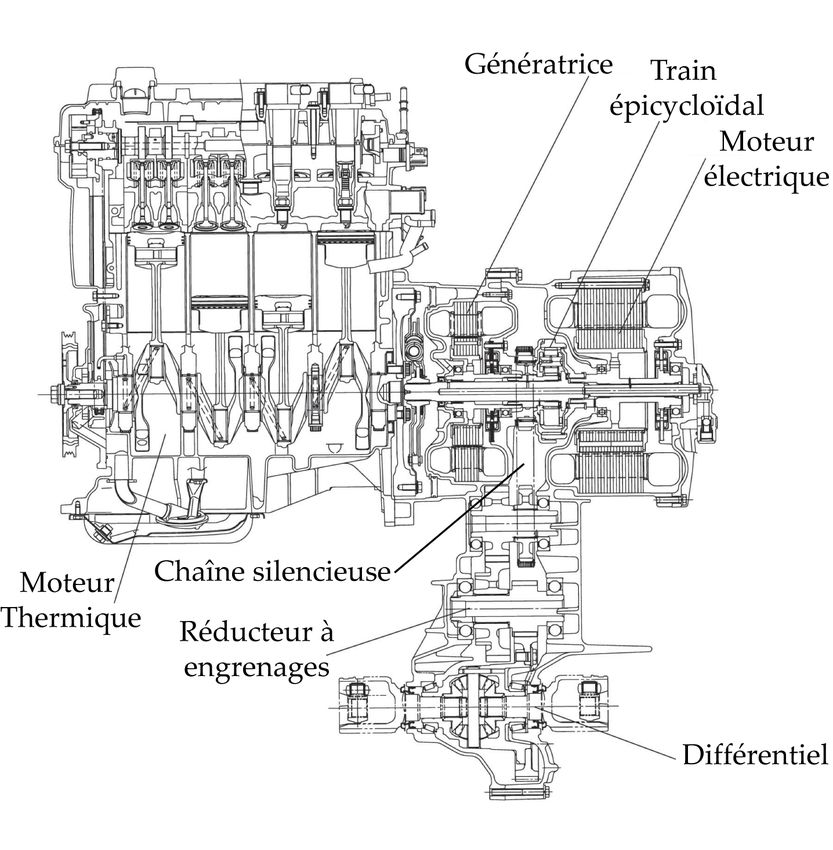
I.1 Architecture du système hybride HSD de TOYOTA
Comme le montre le dessin la Figure 2, la technologie hybride de TOYOTA, nommée HSD (Hybrid
Synergy Drive) associe un moteur thermique à essence et sa transmission, à deux machines électriques
(un moteur électrique et une génératrice électrique). Les trois actionneurs sont liés entre-eux par un
train épicycloïdal.
Figure 2 : Architecture de la chaîne d’énergie du système hybride HSD
1. adapté du sujet du Concours Centrale-Supélec PSI 2007
DS6 – Système Hybrid Synergy Drive de la PRIUS 1/6
MPSI Sciences de l’Ingénieur
À partir de la position de la pédale d’accélérateur et de la vitesse du véhicule, le calculateur
détermine la vitesse de rotation optimale de la génératrice et la consigne d’ouverture du papillon
des gaz. La puissance en sortie du moteur thermique est transmise, grâce à un train épicycloïdal,
à la chaîne silencieuse et à la génératrice. Un asservissement en vitesse de la génératrice permet de
contrôler la vitesse de rotation du moteur thermique.
Le répartiteur de puissance gère les échanges de puissance électrique entre la génératrice, le moteur
électrique et la batterie. Le moteur électrique entraîne la chaîne silencieuse, seul ou en complément du
moteur thermique. Il récupère également l’énergie cinétique ou potentielle du véhicule lors des phases
de ralentissement.
Les chaînes d’énergie et d’information, Figure 3, permettent de percevoir l’organisation fonction-
nelle et structurelle des différents composants du HSD.
Figure 3 : Chaînes d’énergie et d’information du système HSD
Objectif
Valider certains choix de conception du système HSD.
Le sujet est constitué de deux parties :
• la première traite de l’étude cinématique du système HSD ;
• la deuxième porte sur l’asservissement de la génératrice.
Les deux parties sont indépendantes.
DS6 – Système Hybrid Synergy Drive de la PRIUS 2/6MPSI Sciences de l’Ingénieur
II Étude cinématique du système HSD
Un train épicycloïdal est un transmetteur permettant de relier les vitesses de rotation par rapport
au bâti (0) des arbres des trois actionneurs. Dans le cadre de la Toyota Prius, les trois arbres reliés
au train épicycloïdal sont :
• l’arbre du moteur électrique, appartenant à la classe d’équivalence (2) ;
• l’arbre de la génératrice, appartenant à la classe d’équivalence (1) ;
• l’arbre du moteur thermique, appartenant à la classe d’équivalence (4).
II.1 Étude du train épicycloïdal
Paramétrage cinématique :
#» #» #»
Les trois grandeurs d’entrées cinématiques du train épicycloïdal sont donc : Ω 1/0 , Ω 2/0 et Ω 4/0 .
La figure Figure 4, présente les schémas cinématiques plans du train épicycloïdal dans les plans
(A, #»
x , #»
z ) et (A, #»
y , #»
z ) où #»
x 4 , #»
y et #»
z 4 sont des vecteurs fixes dans (4). On définit les vecteurs :
# » 4 4 #» # » 4 4 #» # »4
AI = R1 · z 4 , AJ = R2 · z 4 et BJ = R3 · #» z 4 . R1 , R2 et R3 correspondent respectivement au rayon
de la roue dentée (1), de la couronne dentée (2) et de la roue dentée (3).
Le train épicycloïdal est un train d’engrenages. Les contacts entre les différentes roues et couronne
dentées (au points I et J) sont modélisés par des liaisons de type sphère-plan avec condition de
roulement sans glissement (RSG).
z1 z0 z4
y1 y3
θ10
x4 J y2 J z4
y0 (3)
z2 z0
(3)
I B B
y2 (4) I
θ20 y1
x4 (4)
y0 (1) (2)
y4 x4
z4 z0
y4 A (0)
θ40 A
y0 y4
x4 (1)
y0
x4
z3 z4 (2)
y3
θ34
x4
y4
Figure 4 : Paramétrage du train épicycloïdal du système HSD
#» #» #» #»
Q1. Exprimer les vecteurs taux de rotation Ω 1/0 , Ω 2/0 , Ω 4/0 et Ω 3/4 en fonction des vitesses angulaires
θ̇ij .
Q2. Réaliser le graphe de liaison associé au schéma cinématique du train épicycloïdal.
Q3. Justifier la possibilité d’utiliser un modèle cinématique plan dans le plan (A, #»
y 4 , #»
z 4 ).
n o n o n o
Q4. Exprimer au point A les torseurs cinématiques V1/0 , V2/0 et V4/0 en fonction de θ̇10 , θ̇20
n o
et θ̇40 . Exprimer au point B le torseur cinématique V3/4 en fonction de θ̇34 .
DS6 – Système Hybrid Synergy Drive de la PRIUS 3/6MPSI Sciences de l’Ingénieur
Q5. Écrire la condition de roulement sans glissement au point I. En déduire par la composition des
#» #» #»
vecteurs vitesses, la relation entre V I∈3/4 , V I∈1/0 et V I∈4/0 .
Q6. En utilisant la formule de Varignon (changement de point), déterminer la relation scalaire liant
R3 , R1 , θ̇34 , θ̇40 et θ̇10 .
Q7. Écrire la condition de roulement sans glissement en J. En suivant un raisonnement analogue à
celui des questions 5 et 6, déterminer la relation scalaire liant R3 , R2 , θ̇34 , θ̇40 et θ̇20 .
Q8. Montrer en utilisant les résultats des questions 6 et 7 la formule de Willis :
θ̇14 θ̇10 − θ̇40 R2
= =− .
θ̇24 θ̇20 − θ̇40 R1
II.2 Validation du comportement cinématique en ville et sur route
La Toyota Prius a deux modes principaux de fonctionnement :
• le mode électrique ;
• le mode hybride.
Le mode électrique est principalement utilisé en ville ou dans les embouteillages lorsque la vitesse du
véhicule est faible. Dans ces conditions pour limiter la pollution, le moteur thermique est à l’arrêt. Il y
a alors un échange d’énergie entre le moteur électrique, la génératrice électrique et la batterie. Le mode
hybride est utilisé pour des vitesses plus importantes. Le moteur thermique est mis en fonctionnement
et est utilisé a son régime optimal (à vitesse constante). Le tableau 1 présente le cahier des charges
partiel relatif aux différents modes de fonctionnement.
L’objectif de cette partie est de valider le choix du moteur électrique et de la génératrice par rapport
au cahier des charges ci-dessous.
Performances Critères Niveaux
C1 - vitesse angulaire maximale du moteur thermique 0 tr/min
Pollution en ville
C2 - plage de vitesse du véhicule 0 ≤ V ≤ 50 [km/h]
Consommation C3 - régime optimal du moteur thermique 4000 tr/min
sur route C4 - plage de vitesse du véhicule 50 ≤ V ≤ 170 [km/h]
Tableau 1 - Éléments du cahier des charges relatifs aux modes de fonctionnement de la Toyota Prius
Le moteur électrique entraine les roues en rotation par le biais de la chaîne de transmission consti-
tuée de la chaîne silencieuse, d’un réducteur et d’un différentiel. Lorsque la voiture n’est pas en virage
et en supposant qu’il n’y a pas de glissement entre les roues et le sol, la vitesse du véhicule V est
définie par :
V = α · θ̇20
avec α = 0.075 m. La vitesse angulaire maximale du moteur électrique choisi est de 6 200 tr/min est
celle de la génératrice choisie est de 5 000 tr/min. La couronne dentée (2) a pour rayon R2 = 90 mm
et la roue dentée (1) a pour rayon R1 = 45 mm.
Q9. Le dimensionnement de la chaîne de transmission modélisée par le paramètre α permet-il de
valider le critère C4 avec le moteur électrique choisi ?
Pour les questions suivantes, on admettra la relation obtenue à la question 7 en se référant au
paramétrage de la partie II.1 :
θ̇10 − θ̇40 R2
=− . (Eq. 1)
θ̇20 − θ̇40 R1
DS6 – Système Hybrid Synergy Drive de la PRIUS 4/6MPSI Sciences de l’Ingénieur
Q10. Exprimer θ̇10 en fonction de V , R1 , R2 et α lorsque la Toyota Prius roule en mode électrique.
Q11. Exprimer θ̇10 en fonction de V , R1 , R2 , α et θ̇40 lorsque la Toyota Prius roule en mode hybride.
Q12. À partir des résultats des questions 10 et 11 et en supposant que les critères C1 et C3 sont
vérifiés, déterminer θ̇10 en tour par minute en mode électrique à V = 50 km/h et en mode hybride à
V = 50 km/h et V = 170 km/h. Le choix de la génératrice est-il valide ?
III Asservissement de la génératrice
Afin d’assurer que le régime du moteur thermique soit optimal en fonctionnement hybride, et donc
que la consommation d’essence soit minimale, il est nécessaire d’asservir la vitesse de rotation de la
génératrice. Cette partie s’intéresse à la justification et au dimensionnement d’un correcteur approprié.
Les performances attendues de cet asservissement sont les suivantes :
Performances Critères Niveaux
C3 - Temps de réponse à 5% de la FTBF T5% ≤ 0.15 s
Rapidité
C4 - Pulsation de coupure à 0dB de la FTBO ω0dB ≥ 35 rad/s
C5 - Marge de phase de la FTBO Mφ ≥ 60°
Stabilité
C6 - Dépassement pour une consigne échelon D% ≤ 20%
C7 - Erreur statique Nulle
Précision
C8 - Sensibilité à une perturbation constante en couple Nulle
Tableau 2 - Éléments du cahier des charges relatifs à l’asservissement
Un asservissement (non étudié ici) régule l’intensité du courant circulant dans la génératrice. Ainsi,
les comportements mécanique et électrique de la génératrice se modélisent par le schéma-blocs de la
Figure 5 où CM T est assimilé à une perturbation extérieure.
Figure 5 : Schéma-blocs de l’asservissement en vitesse de la génératrice
Q13. Exprimer ΩGE (p) sous la forme : ΩGE (p) = H1 (p) · ΩcGE (p) + H2 (p) · CM T (p) en fonction de
KGE , KA , JGE , fGE , γ et C(p).
Pour les applications numériques, les paramètres ont les valeurs suivantes :
KGE = 2 Nm/A ; KA = 0,5 A/V ; JGE = 0,2 kg · m2 ; fGE = 0,05 Nm · s et γ = 0.28
DS6 – Système Hybrid Synergy Drive de la PRIUS 5/6MPSI Sciences de l’Ingénieur
III.1 Correcteur proportionnel
On suppose dans un premier temps l’utilisation d’un correcteur proportionnel unitaire : C(p) = 1
0.95 0.27
Q14. À partir de la question précédente, montrer que H1 (p) = et H2 (p) = .
1 + 0.19 · p 1 + 0.19 · p
Q15. En supposant C(p) = 1, tracer l’évolution de ωGE (t) en fonction du temps pour une consigne
échelon ωGEc (t) = ω c
GE · u(t) où u est la fonction d’Heaviside en supposant cM T (t) = 0 et préciser sur
le tracé les valeurs caractéristiques.
Lors du passage du mode électrique au mode hybride à l’instant t1 , le moteur thermique se met en
fonctionnement, cela se traduit du point de vue de l’asservissement de la génératrice par la présence
d’un couple cM T (t) = cM T · u(t − t1 ).
Q16. En supposant toujours C(p) = 1, tracer l’évolution de ωGE (t) en fonction du temps pour une
consigne échelon ωGEc (t) = ω c
GE · u(t) en supposant que le moteur thermique est mis en marche à
l’instant t = t1 = 2s.
Q17. Conclure sur la possibilité de valider les critères C7 et C8 avec un correcteur C(p) = 1.
Q18. À l’aide du théorème de la valeur finale, justifier que les critères C7 et C8 ne peuvent être
validés avec un correcteur proportionnel de la forme C(p) = C.
III.2 Correcteur proportionnel intégral
Afin de valider les critères C7 et C8,le choix se porte sur un correcteur proportionnel-intégral
1
donc la fonction de transfert C(p) = Kc · 1 + .
Tc · p
K
Q19. Mettre la fonction de transfert sous la forme C(p) = α (1 + T · p) en précisant les expressions
p
de K, T et α. Tracer le diagramme de Bode en asymptotique et réel, en phase et en gain, associé à la
fonction de transfert du correcteur.
Le document réponse (Q20) présente le diagramme de Bode obtenu par simulation en gain et en
phase, de la fonction de transfert en boucle ouverte associée à l’entrée ΩcGE (p).
Q20. Déterminer la pulsation de coupure à 0dB ainsi que la marge de phase (faire apparaître les tracés
sur le document réponse). Le choix des paramètres du correcteur permettent-ils de valider les critères
C4 et C5 du cahier des charges ?
Q21. Identifier l’expression de la FTBO associée au diagramme de Bode, en déduire les valeurs de Kc
et Tc utilisées.
Q22. Montrer que la fonction de transfert en boucle fermée peut alors s’écrire sous la forme :
1 + 0.035 · p
F T BF (p) =
1 + 0.0403 · p + 0.001 · p2
Afin de valider le choix du correcteur, un essai avec une consigne en échelon d’amplitude 5 rad/s
a été réalisé. Les résultats sous fournis sur le document réponse (Q23).
Q23. Sur le document réponse, conclure quant au respect des critères C3 et C6 du cahier des charges
en justifiant vos analyses par des tracés.
Q24. Dresser une synthèse des activités menées dans ce sujet et expliquer la démarche mise en œuvre.
Vous pourrez illustrer votre réponse à l’aide de la démarche de l’ingénieur.
DS6 – Système Hybrid Synergy Drive de la PRIUS 6/6NOM : Prénom : Classe : MPSI
DOCUMENT RÉPONSES
Q19 : Diagrammes de Bode asymptotiques et réels du correcteur
40dB
30
20
10
0
−1010◦1
90 102 103 104rad/s
60
30
0
−30
−60
−90101 102 103 104rad/s
Q20 : Diagrammes de Bode réels et asymptotiques de la FTBO associée à l’entrée ΩcGE (p) :
1/2MPSI Sciences de l’Ingénieur
Q23 : Évolution de la vitesse de rotation de la génératrice pour une consigne échelon de 5 rad/s sur
la Toyota Prius :
DS6 – Système Hybrid Synergy Drive de la PRIUS 2/6Vous pouvez aussi lire