M2 MPRO Optimisation dans les Graphes 2015-2016 - Programmation linéaire et problèmes d'optimisation dans les graphes - Cnam ...
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
M2 MPRO
Optimisation dans les Graphes
2015-2016
Programmation linéaire
et problèmes d'optimisation dans les graphes
1
Problèmes d'optimisation dans les graphes :
quelles méthodes pour les résoudre ?
Théorie des graphes (et algorithmique de graphes) :
La théorie des graphes fournit un cadre unifié pour étudier des
propriétés structurelles des graphes (bornes sur la valeur d'un paramètre),
mais aussi pour résoudre certains problèmes d'optimisation dans les graphes
De nombreux algorithmes combinatoires issus de l'algorithmique de graphes
sont ainsi basés sur ces propriétés structurelles
Exemple naïf : K5 n’est pas planaire (propriété structurelle) trouver une
clique de taille maximum dans un graphe planaire est une tâche « triviale »
Un autre des grands domaines de la RO est la programmation
mathématique, et en particulier linéaire (PL ou PLNE) :
Des modèles et des méthodes génériques (et souvent efficaces)
Peut-on exhiber des liens entre ces deux domaines ? S'il y en a, comment
les exploiter ? Et comment traduire la spécificité d'un problème particulier
de l'optimisation dans les graphes dans un modèle aussi général ?
2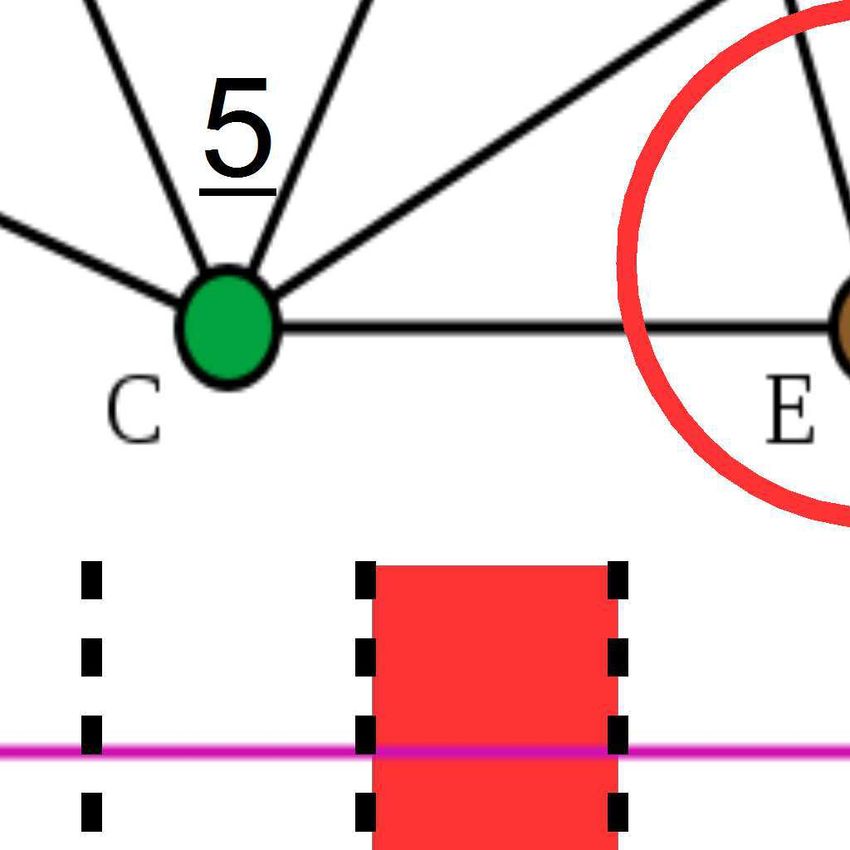
PARTIE I :
Dualité en PL et
matrices totalement unimodulaires ;
Application au théorème de König
3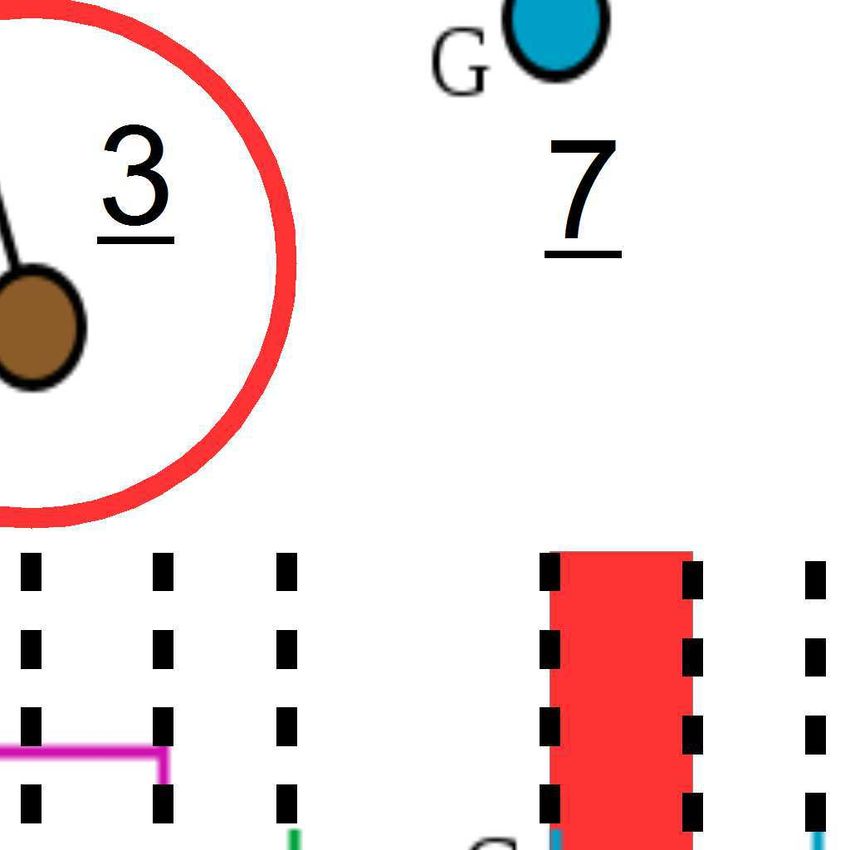
Les problèmes du couplage maximum et du
transversal minimum (vertex cover) dans un graphe
Deux problème emblématiques de la RO et de l’optimisation
dans les graphes :
On se donne un graphe G non orienté
Couplage = ensemble d’arêtes de G sans sommets en commun
Transversal = ensemble de sommets de G qui contient au
moins une extrémité de chaque arête de G
Modèle PLNE pour le problème du couplage maximum ?
Dual (avec variables entières) de la relaxation continue de ce
PLNE = PLNE pour le transversal minimum
La faible dualité en PL implique déjà que :
taille couplage maximum ≤ taille transversal minimum
4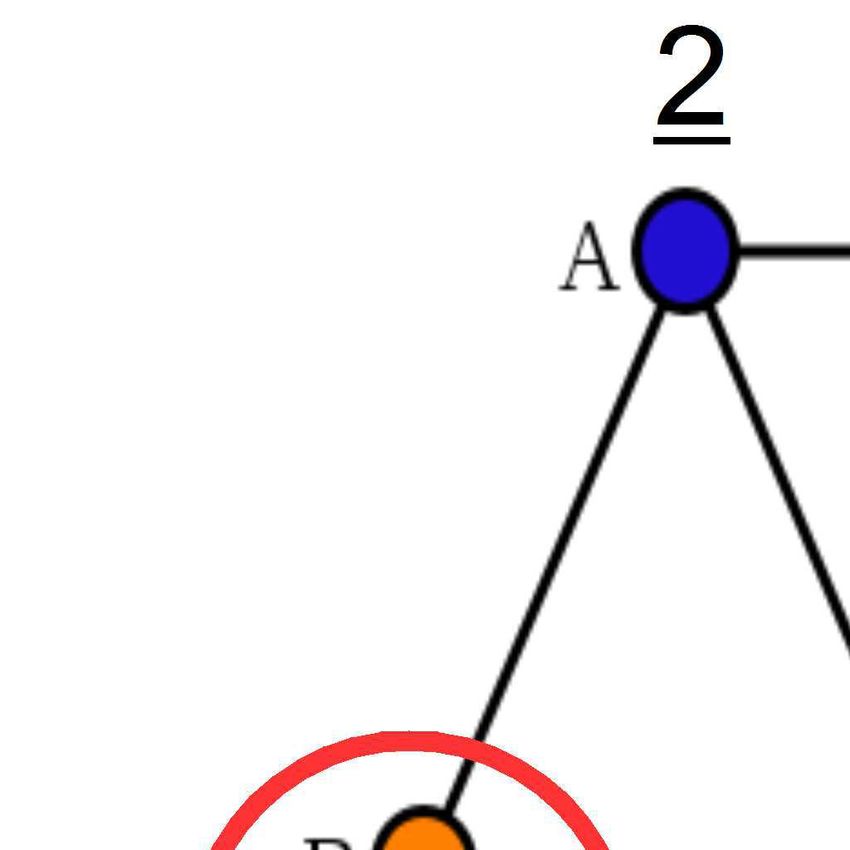
Totale unimodularité
Définition : une matrice à valeurs réelles est dite totalement
unimodulaire (TU) si et seulement si le déterminant de toute sous-
matrice carrée qui en est extraite vaut 0, 1 ou -1
Propriété 1 : toute sous-matrice d’une matrice TU est TU, et en
particulier tout élément d'une matrice TU vaut 0, 1 ou -1 (sous-
matrice carrée extraite ayant une ligne et une colonne)
Propriété 2 : si une matrice est TU, alors la juxtaposition de cette
matrice avec la matrice identité est aussi une matrice TU
Propriété 3 : une matrice est TU si et seulement si sa transposée l’est
Caractérisation de Ghouila-Houri : une matrice est TU ssi tout sous-
ensemble de colonnes peut être partitionné en deux parties telles que,
sur chaque ligne, les sommes des éléments sur chacune de ces deux
parties diffèrent d'au plus 1
Corollaire de la propriété 3 : le théorème précédent est aussi vrai en
échangeant « colonne » et « ligne »
5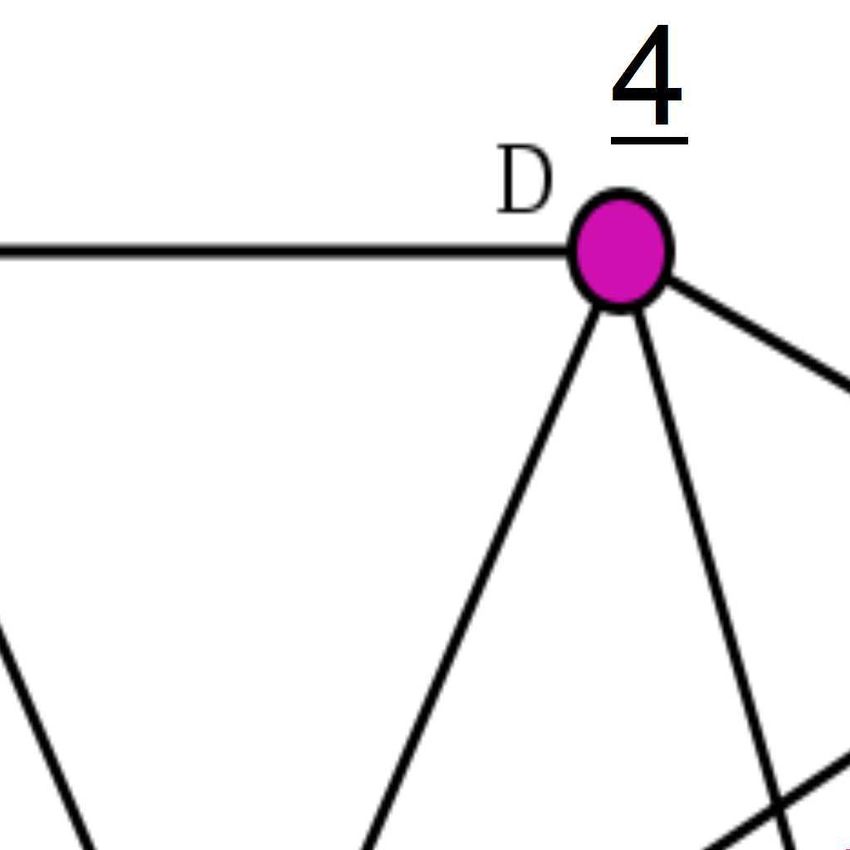
Conséquence de la totale unimodularité
Propriété 4 : si un PL a une matrice des contraintes TU et des seconds
membres entiers, alors toute solution de base de ce PL est entière
(c'est donc vrai, en particulier, pour toute solution de base optimale)
Corollaire de la Propriété 4 :
Résoudre un PLNE ayant une matrice des contraintes TU et des
seconds membres entiers est équivalent à résoudre sa relaxation
continue (c'est-à-dire un PL) !
6
Une première condition suffisante de totale
unimodularité, et une conséquence
Propriété 5 : la matrice d'incidence (arêtes-sommets) d'un graphe biparti
est TU
Corollaire de la Propriété 5 et de la dualité PL entre couplage
maximum et transversal minimum :
Théorème de König
La « spécificité » du problème d'optimisation dans les graphes
considéré est donc ici exprimée par la formulation PL/PLNE utilisée (et
l’interprétation du dual), et les propriétés de la matrice des contraintes
associée (matrice d'incidence d'un graphe biparti)
Une autre conséquence de ce raisonnement est que : les problèmes du
couplage maximum et du transversal minimum sont polynomiaux
dans les graphes bipartis !
7PARTIE II :
Matrices TU et dualité flot/coupe
(Théorème de Ford-Fulkerson) ;
Problèmes connexes (flots à coût minimum,
multiflots) et conséquences
8Le problème du flot maximum
Autre problème emblématique en RO/optimisation dans les graphes
Rappel : on se donne un graphe orienté G connexe dont les arcs sont
munis de capacités, un sommet source s et un sommet puits p
Problématique : on cherche, dans G, à acheminer autant d'unités de flot
que possible de s vers p, sans dépasser la capacité de chaque arc
Modèle PLNE (modèle 1) ?
• Le flot total circulant sur tous les chemins de s à p passant par
chaque arc est limité par la capacité de l'arc
• Maximiser la quantité de flot acheminée de s à p
• Résolution en temps polynomial si flots continus ?
Modèle PLNE alternatif (modèle 2) ?
• Conservation du flot en chaque nœud (sauf s et p)
• Flot limité par la capacité sur chaque arc
• Maximiser la quantité de flot acheminée de s à p
9Calcul du dual
On peut écrire les PL duaux des relaxations continues des 2
modèles précédents
Modèle 1 : et si les variables duales sont entières ?
On obtient un PL modélisant le problème de la coupe minimum
Les PL sont liés par une relation de dualité (dualité en PL), et donc les
problèmes aussi !
Modèle 2
Interprétation du PL dual si les variables duales sont entières
Preuve alternative de la faible dualité flot/coupe !
10Une deuxième condition suffisante de totale
unimodularité, et une autre conséquence
Propriété 6 : la matrice d'incidence (arcs-sommets) d'un graphe orienté
est TU
Corollaire (immédiat !) du modèle 2 et des Propriétés 1 à 4 + 6 :
Théorème de Ford-Fulkerson (flot max=coupe min)
« Preuve alternative » basée exclusivement sur la dualité en PL et les
propriétés des matrices TU
La « spécificité » du problème d'optimisation dans les graphes considéré
est ici encore exprimée par la formulation PL/PLNE utilisée (et
l’interprétation de son dual), et les propriétés de la matrice des
contraintes associée (matrice d'incidence d'un graphe orienté)
Autre conséquence de ce raisonnement : polynomialité des 2 problèmes
considérés (flot maximum et coupe minimum), grâce au modèle 2
11Un lien inattendu ?
En réalité : couplage maximum dans un graphe biparti = flot
maximum dans un certain graphe obtenu après transformation
De même : transversal minimum = coupe minimum dans ce
même graphe obtenu après transformation
Corollaire de ces 2 remarques et du théorème précédent :
Théorème de König
12Flot maximum dans les graphes non orientés
Problème du flot maximum entre deux sommets s et p dans un
graphe non orienté ?
La matrice des contraintes de la formulation PLNE la plus naïve n'est
pas TU ==> ce problème est-il plus difficile ? Comment le résoudre ?
Réduire le problème considéré à un problème ayant une matrice des
contraintes TU, et en déduire ainsi une « bonne » formulation PLNE ?
Oui : on peut en fait réduire ce cas au cas des graphes orientés !
On en déduit donc une formulation PLNE ayant une matrice TU par un
raisonnement purement combinatoire, qui ne porte que sur des
transformations du graphe donné dans l'instance considérée
Identique pour la coupe minimum ==> extension du théorème de F.-F.
13Flot à coût minimum et totale unimodularité :
conséquences et applications (1/2)
On se donne un graphe G connexe, orienté ou non, dont les
arcs/arêtes sont munis de capacités et de coûts unitaires, ainsi
que deux sommets s (source) et p (puits) de G
On considère le problème suivant : déterminer dans G un flot
de valeur donnée (potentiellement maximum) entre s et p, et
dont le coût total (somme sur tous les arcs du coût unitaire de
l'arc fois la valeur du flot sur l'arc) est minimum
Problème du flot à coût minimum : le modèle PL associé
(« inspiré » de celui du flot maximum) a une matrice TU
==> polynomial !
14Flot à coût minimum et totale unimodularité :
conséquences et applications (2/2)
Plus court chemin (longueurs ≥ 0) : déterminer un plus
court chemin entre deux sommets s et p dans un graphe
calculer un flot de valeur 1 à coût minimum
Affectation linéaire : n tâches à affecter à n agents (chaque
tâche affectée à un et un seul agent), chaque affectation
induisant un coût connu
==> minimiser la somme totale des coûts (couplage parfait
biparti à coût minimum) = flot (de valeur n) à coût minimum
Et si les coûts sont quelconques (>0 ou Non : le modèle n'est plus adapté !
15Multiflots (et multicoupes)
Plusieurs paires source-puits : les unités de flot émises par une source
donnée ne peuvent être acheminées que vers le puits correspondant
Une seule paire source-puits = flot maximum ==> problème plus général
Modèles PLNE similaires aux modèles 1 et 2
Notions de « coupe » similaire à la coupe simple : multicoupe
Même dualité des relaxations continues des formulations PLNE, MAIS
les matrices des contraintes obtenues ne sont pas TU !
Problèmes NP-difficiles, même dans des cas très particuliers
16Une bonne formulation pour les multiflots/multicoupes
dits « multiterminaux » dans les graphes sans circuits
Hypothèse 1 : étant donnés t sommets du graphe considéré, il existe une
paire sources-puits entre toute paire de ces t sommets (multiterminaux)
Hypothèse 2 : le graphe G considéré est orienté et sans circuits
On peut établir une bonne formulation pour les problèmes de multiflots et
multicoupes dans ce cas, en les réduisant à un flot et une coupe simples
Etape 1 : on « éclate » chacun de ces t sommets vi en 2 sommets v'i et v''i
(v'i est incident à tous les arcs entrants en vi, et v''i à tous ceux en sortant)
Etape 2 : on ajoute les 2 sommets s (super-source) et p (super-puits), et
on relie s à tous les v''i, et tous les v'i à p (par des arcs de grande capacité)
Déterminer un multiflot maximum (une multicoupe minimum)
calculer un flot maximum (une coupe minimum) entre s et p
17PARTIE III :
Totale unimodularité et algorithmes
combinatoires : les approches primales-duales
18Graphes d'intervalle Un graphe d’intervalle (GI) est le graphe d’intersection d’un ensemble d’intervalles (par exemple, d’intervalles de temps) horizontaux : les sommets du GI sont les intervalles, et deux sommets sont reliés par une arête du GI ssi les deux intervalles associés ont une intersection non vide Etant donné un graphe d’intervalle, une représentation par intervalles de ce graphe peut être obtenue en temps polynomial Les deux représentations sont donc polynomialement équivalentes 19
Stables maximums dans les graphes d'intervalle
Un ensemble stable (ou stable) dans
un graphe d’intervalle peut donc être
vu comme un ensemble d’intervalles
deux à deux disjoints
Donc chercher un stable maximum
dans un tel graphe = choisir un
ensemble de cardinalité maximum
d’intervalles deux à deux disjoints
Dans cet exemple, {C,G} = stable de
cardinal 2, et {A,E,F}, {B,D,G} =
deux stables maximums
Dans le cas général, comment
déterminer un stable maximum dans
de tels graphes ?
20Stables maximums dans les graphes d'intervalle
Un ensemble stable (ou stable) dans
un graphe d’intervalle peut donc être
vu comme un ensemble d’intervalles
deux à deux disjoints
Donc chercher un stable maximum
dans un tel graphe = choisir un
ensemble de cardinalité maximum
d’intervalles deux à deux disjoints
Dans cet exemple, {C,G} = stable de
cardinal 2, et {A,E,F}, {B,D,G} =
deux stables maximums
Dans le cas général, comment
déterminer un stable maximum dans
de tels graphes ?
21Stables maximums dans les graphes d'intervalle
Un ensemble stable (ou stable) dans
un graphe d’intervalle peut donc être
vu comme un ensemble d’intervalles
deux à deux disjoints
Donc chercher un stable maximum
dans un tel graphe = choisir un
ensemble de cardinalité maximum
d’intervalles deux à deux disjoints
Dans cet exemple, {C,G} = stable de
cardinal 2, et {A,E,F}, {B,D,G} =
deux stables maximums
Dans le cas général, comment
déterminer un stable maximum dans
de tels graphes ?
22Formuler le problème du stable maximum dans les
graphes d'intervalle (1/3)
Bonne formulation pour ce problème ?
– Formulation « classique » pour le stable maximum :
• Une variable 0-1 xi pour tout sommet (ou intervalle) i, indiquant si i
est choisi (=1) ou non (=0)
• Une contrainte xi+xj ≤ 1 pour toute arête (i,j)
• On maximise la somme des xi
MAIS la matrice des contraintes de cette formulation n’est pas
toujours TU (exemple du cycle à 3 sommets, comme ABC) !
23Formuler le problème du stable maximum dans les
graphes d'intervalle (2/3)
Formulation alternative :
– Notons [di,fi]=ième intervalle, et
ej=jème plus petit élément de
l’union des ensembles {di,fi}
– Découpage de l’horizon de
temps en 2n-1 fenêtres (ou
moins), chacune associée à la
période [ej,ej+1] pour un j
– Mêmes variables
– En revanche, il y a désormais
une contrainte par fenêtre e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
24Formuler le problème du stable maximum dans les
graphes d'intervalle (3/3)
Bonne formulation pour ce problème ?
– Propriétés de cette formulation ?
– Tout intervalle contient des fenêtres consécutives
– Sur chaque colonne, les « 1 » sont donc consécutifs
– Propriété des 1 consécutifs ==> matrice d’intervalle
– Or, toute matrice d’intervalle est TU !
– Le problème est donc polynomial par la PL
– Le problème dual entier consiste à choisir un nombre minimum de
fenêtres intersectant tous les intervalles
25Algorithme primal-dual pour le problème du stable
maximum dans les graphes d'intervalle (1/3)
Faire mieux que la PL ?
– En réalité, dans ce cas, on peut même concevoir un algorithme
combinatoire glouton (rapide) pour ce problème
– On va en fait décrire une paire d'algorithmes gloutons (les deux
peuvent être implémentés en O(n), où n=nombre d'intervalles)
– Ces algorithmes construisent une solution « primale » et une
solution « duale » en se basant sur les relations d’exclusion
du 2ème PL et de son dual
– On appelle ces approches « primales-duales », et c’est une
méthode de conception d’algorithmes particulièrement utile
26Algorithme primal-dual pour le problème du stable
maximum dans les graphes d'intervalle (2/3)
Pseudo-code de l'algo. glouton pour le stable max. dans un GI :
– Calculer une représentation par intervalles du GI
– Trier et numéroter les intervalles par ordre croissant de leurs dates
de fin
– Intervalle courant := premier intervalle
– Tant que non STOP faire
• Sélectionner l'intervalle courant
• S'il n'existe plus d'intervalle ayant une intersection vide avec
les intervalles déjà sélectionnés, alors STOP
• Sinon, intervalle courant := premier intervalle n'ayant
aucune intersection avec les intervalles déjà sélectionnés
27Algorithme primal-dual pour le problème du stable
maximum dans les graphes d'intervalle (3/3)
Dans ce premier algorithme, les numéros des intervalles
sélectionnés au cours de l’exécution sont donc croissants
Pseudo-code de l'algorithme glouton pour le PL dual :
– Exécuter l'algorithme précédent (à la fin de ce dernier, une fenêtre
contenue dans l'un des intervalles sélectionnés est dite « active »)
– Pour chaque intervalle sélectionné par l’algorithme précédent faire
• Sélectionner la fenêtre la plus à droite contenue dans cet intervalle
28Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
29Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
30Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
31Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
32Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
33Exemple de déroulement de l'algorithme primal-dual
Solutions renvoyées par l'algorithme sur l'exemple :
2 4
6
1 5 3 7
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14 e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14
34Preuves des algorithmes
Preuves des algorithmes basées sur les relations d'exclusion en PL :
– Rappel : dans une solution (de base) optimale, contrainte primale
(duale) saturée OU variable duale (primale) associée nulle
– De façon équivalente : dans une solution (de base) optimale, contrainte
primale (duale) non saturée ⇒variable duale (primale) associée nulle
– Ici, un type de contraintes primales et un type de contraintes duales :
• Fenêtre non active ⇒ non sélectionnée : toute fenêtre sélectionnée est active
• Un intervalle contient plus d'une fenêtre active ⇒ non sélectionné : tout
intervalle sélectionné ne contient qu'une seule fenêtre active
– Il « suffit » donc de montrer que les deux solutions construites :
• Sont admissibles (la solution primale l’étant clairement, il reste à s’assurer
que la solution duale l’est),
• Respectent les relations d'exclusion (vrai par définition du 2ème algorithme).
35Bilan sur les approches primales-duales
Les propriétés d’une bonne formulation PL peuvent parfois permettre
d’établir la polynomialité du problème étudié
Souvent, cela n’est qu’une première étape dans la résolution pratique du
problème, et signifie en fait qu’il existe un algorithme combinatoire
efficace pour résoudre ce problème sans passer par la PL
Un algorithme primal-dual est un bon candidat dans ce cas-là, puisque
ses « choix » sont guidés par les conditions des écarts
complémentaires (relations d’exclusion) du PL associé
Dans certains cas, cela ne marche pas si bien :
– Stables de poids maximum dans un graphe d’intervalle (dans notre exemple, si C
a un poids de 3, et tous les autres 1, alors la valeur optimale est 4)
Enfin, ce genre d’approches peut parfois être utilisé également pour
obtenir des solutions approchées à des problèmes difficiles (cf CAP)
36
Powered by TCPDF (www.tcpdf.org)Vous pouvez aussi lire