Space Systems Dependability Industrial Challenges - Jean-Paul Blanquart ASTRIUM Satellites
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Space Systems Dependability Industrial Challenges Jean-Paul Blanquart ASTRIUM Satellites Jean-paul.blanquart@astrium.eads.net ETR - 2013 Toulouse, France, 26-30/8/2013

Outline
Dependability in space
Constraints, needs, solutions, achievements
Dependability (FDIR) process
Model Based Dependability
Engineering, Assessment
Why it may become so complicated?
ETR – 2013 – Toulouse, France, 26-30/8/2013
Space systems: Constraints
Limited mass, power
Limited ground-board link
Limited maintenance
Radiations
Knowledge, mastering of the environment
Phased missions, critical parts
Long lifetime
ETR – 2013 – Toulouse, France, 26-30/8/2013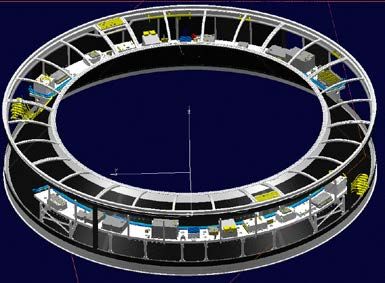
A large variety of dependability needs
Reliability
Lifetime (satellites, space probes)
Continuity of service (launchers, rendez-vous, re-entry)
Availability
Instantaneous (satellite, probes critical phases, launchers)
Average (Mission return)
Outage duration, frequency (critical or expensive services)
Maintainability, adaptation (reconfiguration, software, procedures)
Safety (Launchers, manned flights, rendez-vous, end of life)
Security
ETR – 2013 – Toulouse, France, 26-30/8/2013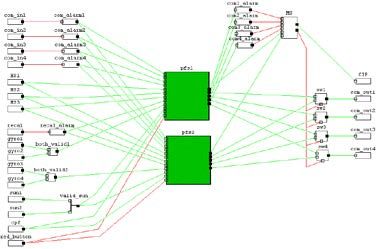
Solutions, basic principles
Selective redundancy, hot or more often cold
duplex
Some notable examples of comparison and vote
Automatic detection and reconfiguration (FDIR)
Safe mode
“Favourite” adversaries
Single point of failures, common cause failures, failure
propagation
Unpredicted situations, lack of observability, controllability
ETR – 2013 – Toulouse, France, 26-30/8/2013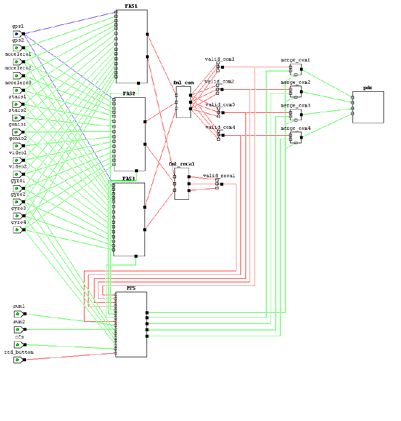
Classical satellite architecture
typically 1 or 2
Interface payload
Remote Other
Computer RIU PIU PIU
TM SCU A
TC
Ire Gyp
s
TM
SCU
TC B Mil-STD 1553B bus
GPS
Sun
Sensor PPU PSR MW-X
sensor4
ADE
CPS
Ion thrusters
SADM
Batteries
2*7 Thrusters Mechanisms
Solar
Arrays
ETR – 2013 – Toulouse, France, 26-30/8/2013Computer failure (cold duplex)
Senseur
Mémoire
contexte
Nœud Nœud
(off)
autotests on/off autotests
Présence MRE
Terre
commutatio
Actuateur
ETR – 2013 – Toulouse, France, 26-30/8/2013Launcher (Ariane 5)
OBC1 inter-computers OBC2
(Master) alarm link (Backup)
Remote Remote
unit 1 unit 1 Hot-Duplex,
(nominal) (backup)
semi-cross-strapped,
SdC one-shot
(Mil. Std. 1553B)
Remote Remote
unit n unit n
(nominal) (backup)
Umbilical to launchpad
+ Safety
ETR – 2013 – Toulouse, France, 26-30/8/2013Manned automatic vehicles (projects)
Communication Busses
RT RT
MIOP NAP
RT RT RT RT RT RT
GNC1 GNC2 GNC3
Alimentation
SIORP
BC IPC BC IPC BC IPC BAP
BC IPC
GNC4
USR
IPN
RT/OBS
Reset / Alimentation Bfin TM1 TM2 BFin Reset / Alimentation
GNC1 Bus GNC2 Bus GNC3 Bus GNC4 Bus
OBC 1 OBC 2
BFout1 BFout2
Contrôle commande RT/OBS Contexte / Reprise
BC
1553
ETR – 2013 – Toulouse, France, 26-30/8/2013ATV (Automatic Transfer Vehicle)
ATV CORE ATV
CARGO
RUSSIAN SEGMENT BUSES
Propulsion
FTC 1 FTC 2 FTC 3 Drive Gyros Earth Rendez-vous
Electronics Sensors Sensors
SYSTEM BUSES
VTC CMU CMU MSU S UHF Power GPS CMU
Band Distr.
US SEGMENT BUSES to CMUs
Equipment SENSORS
Measurement & Command Sun ACTUATORS
Sensors
Launch Pad i/f BUSES
ETR – 2013 – Toulouse, France, 26-30/8/2013ATV Fault Tolerant Computer
Avionics System Bu s A
Avionics System Bus B
Avionics S ystem Bus C
A vionic s System Bus D
ALB
FML
DPU1 DPU2 DPU3
AVI DPU4
ETR – 2013 – Toulouse, France, 26-30/8/2013Indicative values, from public data (up to 2005)
No pretention as strongly substantiated statistics
And it works…
Launchers
10%
Propulsion
100.0
13% Command
90.0 39%
80.0 Structure
Success rate
70.0 3%
60.0 Power
50.0 6%
40.0
30.0
Separation
20.0
1955 1960 1965 1970 1975 1980 1985 1990 1995 2000 2005 Explosion
29%
Launches 10 year mean Mean (90.7%)
Satellites 9%
“~10-6/h”
2xlifetime, 90%> 4% 20% Propulsion
But: Command
Launch: 6-7% Mechanical
In-orbit installation: 4-5% 25%
Power
20%
Early phase: 1.5 10-6/h
Life: 0.5 10-6/h Deployment
Environment
22%
ETR – 2013 – Toulouse, France, 26-30/8/2013Outline
Dependability in space
Constraints, needs, solutions, achievements
Dependability (FDIR) process
Model Based Dependability
Engineering, Assessment
Why it may become so complicated?
ETR – 2013 – Toulouse, France, 26-30/8/2013Dependability process (FDIR)
REQUIREMENTS
• One Failure tolerant design
Events • R(t) ≥ 0,8
HW ? SW ? GCC ?
• D(t) ≥ 0,99
• Autonomy …
•…
NORMAL MODE SAFE MODE
Events
GS DRU Rech_pf_y TH/Rech_cu
Events
Batterie Alimentation
TX_B IF_1553 - CV_DRU_y MSI_y
TX_A
1553_cu
HW ?
SW ? RX_A DCU_A TTR_A OBMU
SW ?
PM_x
RX_B DCU_B TTR_B 1553_int
GCC? TX_B
IOS_y IOT_y
TX_A
MAG_y CSS_y MTQ_y RS_y TH_pf_y
GCC?
FDIR Failures Management
- DETECTION
• REQUIREMENTS How ? Which parameters ? Frequency ?...
• ARCHITECTURE - ISOLATION
Events Protections, Time to react ?...
• Modes versus “failures” HW ? SW ? GCE ? - RECOVERY
• HIERARCHY Which actions ? Who executes ? …
• FD/I/R Management
GCC: Ground Control Centre
ETR – 2013 – Toulouse, France, 26-30/8/2013FDIR analysis
RAMS_001 « Every failure likely to propagate shall be detected in appropriate time in order
REQUIREMENTS to avoid propagation to another reliability block (as defined in teh reliability block diagram) »
RAMS_051 « Every failure with criticality 1 shall trigger a safe mode »
FDIR
NORMAL MODE SAFE MODE
T
DTC XS MVTHI XS
REFT 8Hz REFT 8Hz
STRATEGY
BAS-VIS RA-E RA GS DRU Rech_pf_y TH/Rech_cu
DTC PAN MVTHI PAN OBC FCL
(LEON 3) PPS
Equerre I/F OMUX
Batterie Alimentation
8PSK 8PSK 8PSK 8PSK
Dét. IRM
MEP IRM
BEV TX_B IF_1553 - CV_DRU_y MSI_y
BEV
et IRT
MEP IRT
TMI-CDC
TC-CDC
TMS-
CDC 1553_cu
FCL
TX_A
LPTC
LPTC EDR
COME REFT RX_A DCU_A TTR_A OBMU
RIU
CTAinst.
CTA inst.
PM_x
MSI
Corps noir
CTA inst.
REFT 8Hz RX_B DCU_B TTR_B 1553_int
(calibration)
Mecalib
T
TX_B
T T
IOS_y IOT_y
TX_A
REFT 32Hz
REFT 32Hz
REFT 16Hz
PPS
FCL
(Rx)
CMG-E
TBS A/B Thermistances CMG-E
CMG-E
(Rx en red. chaude) (AD) FOG-E A FOG-E B SST-E NAV CMG-E
GS
Coupleur
3dB
Réchauffeurs
2 x 32 (AC) PCDU GS FOG-O FOG-O SST-O
ANAV MAG_y CSS_y MTQ_y RS_y TH_pf_y
RMU
ABS ABS
GS SSG
Nadir Zenith
GS CMG-M
MAC
MAG
(3 axes)
BAT (Li-Ion) Propulsion
(2 branches de
8 tuyères 1N)
TC
Eqt BF FM Fonction Dysfonctionnement Effet Local Effets système N A Recommandations TM Maîtrise G C Remarques
3 1 1 CTA_BUS_RECH c/o réchauffeur Absence activation d'un Fonction contrôle thermique erronée T° ligne i 2= SURVEILLANCE 1 R SUR C= la surveillance comporte un
-Activer les réchauffeurs du réchauffeur Poinst localements froids (6 lignes affectées) LVC#XX : Comparaison mesure- seuil haut et un seuil bas
contrôle thermique LVC#XX : Comparaison mesure-commande commande C= 2 cartes RECH_N et RECH_R
Procédure LVC : SYS_ARO en redondance froide dans boîtier
F / D / I / R
Passage en mode SAT_SAF 3= SOL PCDU (x2)
DESIGN
Disponibilité affectée Possibilité d'utiliser la carte
RECH_B
3 1 2 CTA_BUS_BUS_RECH c/c réchauffeur MEO protection électrique Fonction contrôle thermique erronée T° ligne i, j, k 2= SURVEILLANCE 1 R SUR C= la surveillance comporte un
-Activer les réchauffeurs du PCDU LCL groupe de 6 Poinst localements froids (6 lignes affectées) … LVC#49 : Comparaison mesure- seuil haut et un seuil bas
contrôle thermique pertes de 6 réchauffeurs LVC#XX : Comparaison mesure-commande commande C= 2 cartes RECH_N et RECH_R
Procédure LVC : SYS_ARO en redondance froide dans boîtier
Passage en mode SAT_SAF 3= SOL PCDU (x2)
Disponibilité affectée Possibilité d'utiliser la carte
RECH_B
4 1 1 CT_BUS_TH Informations capteurs Paramètres Thermistances Aucun effet au permier ordre R= Evaluer la possibilité de T° ligne i 1= PROTECTION 1 R P C= ES_A reçoit TH_A, TH_C
-Fournir les TH canal 1 du erronées (ES_A) erronés voie A ou voie B Vote majoritaire poursuivre la mission quelle Vote majoritaire (2/3) C= ES_B reçoit TH_B
contrôle thermique que soit lles lignes TH C= le vote majoritaire permet
affectées d'éviter une reconfiguration et
R= Statuer sur permet de tolérer des pannes
programmation du CTA en croisées sur différentes lignes
mode survie
4 1 2 CT_BUS_TH Informations capteurs Paramètres Thermistances Aucun effet au permier ordre R= Evaluer la possibilité de T° ligne i 1= PROTECTION 1 R P C= ES_A reçoit TH_A, TH_C
-Fournir les TH canal 1 du erronées (ES_B) erronés voie A Vote majoritaire poursuivre la mission quelle Vote majoritaire (2/3) C= ES_B reçoit TH_B
contrôle thermique que soit lles lignes TH C= le vote majoritaire permet
affectées d'éviter une reconfiguration et
R= Statuer sur permet de tolérer des pannes
programmation du CTA en croisées sur différentes lignes
mode survie
6 1 1 MAGNETOMETRE Acquisitions Mesures champ magnétique SAT_NOM: Magnétomètre n/u X MNL: Erreur 2= ERREUR REPORT 3 R C= Magnétomètre utilisé
-Mesurer le champ magnétomètre bloquées inutilisables LVC#XX : Sorties MAG bloquées report LVC#XX : Sorties MAG uniquement en mode ASH (survie
magnétique terrestre sur les 3 Bx, By, Bz (0, …) Erreur report ASH: bloquées et première acquisition)
axes Bx, By, Bz ASH : Bx, By, Bz pour calcul loi Bpoint Reconfiguration C= Magnétomètre redondé
perte des fonctions : Mesures de champ magnétique automatique ACQUISITION/ASH C= surveillance magnétomètre
Mode ASH erroné SURVIE 2= SYS_ARO entraîne erreur report en MNL
Non convergence STAB LVC#XX : Sorties MAG (information sol uniquement)
RAMS_101 « An electrical protection shall protect the spacecraft from any short-circuit down-stream » LVC#XX : Sorties MAG bloquées
Procédure LVC : SYS_ARO
Pass
bloquées
RAMS_151 « In order to detect ASH control failure during stabilization phase, the OBSW shall monitor
the duration of the stabilization phase. Triggering of this surveillance shall lead to ARO.
(URD.AOCS.ASH.FDIR.0100)
V&V
ETR – 2013 – Toulouse, France, 26-30/8/2013FDIR lifecycle
System Specification Functional FDIR
FDIR REPORT
REPORT
• Lifetime Functional •• FDIR
FDIR design
design
• Reliability target Analysis
Analysis •• …
…
• Availability target
• Failure events
• Autonomy
• Failure tolerance level Risk
Risk Contingency
Contingency
• design rules Analysis
Analysis Analysis
Analysis
•…
FDIR
FDIR TESTING
TESTING
•• Test
Test Spécifications
Spécifications
FDIR
FDIR POLICY
POLICY
•• Redundancy
Redundancy FMECA_1 FMECA_4
•• Architecture
FMECA_1 FMECA_4
Architecture (Functional) (consolidated)
•• FDIR
FDIR Management
Management (Functional) (consolidated)
•• Operational
Operational Modes
Modes
•• Feared
Feared Events
Events
FMECA_3
FMECA_3 FDIR
FDIR VERIFICATION
VERIFICATION
(HSIA)
(HSIA) •• FDIR
FDIR Report
Report 11
FDIR •• REVIEWS
FDIR DESIGN
DESIGN REVIEWS
•• FDIR
FDIR Policy
Policy (detailed)
(detailed)
•• Monitoring
Monitoring FMECA_2
FMECA_2
•• Recovery
Recovery
•• Requirements
(Detailed)
(Detailed)
Requirements
Sub’s
Sub’s SPECIFICATION
SPECIFICATION Sub’s
Sub’s DESIGN
DESIGN
•• Failure
Failure tolerance
tolerance •• Monitoring
Monitoring
•• …
… •• FMECA
FMECA
MONITORING
MONITORING // RECOVERY
RECOVERY SW
SW DESIGN
DESIGN
•• SSS
SSS // SRS
SRS (SW)
(SW) inputs
inputs •• Design
Design Report
Report
•• System
System database
database inputs
inputs
ETR – 2013 – Toulouse, France, 26-30/8/2013Outline
Dependability in space
Constraints, needs, solutions, achievements
Dependability (FDIR) process
Model Based Dependability
Engineering, Assessment
Why it may become so complicated?
ETR – 2013 – Toulouse, France, 26-30/8/2013Types of models (for dependability)
determined by the objectives
Quantitative (probabilistic) analysis of RAMS properties
Modelling the impact of faults/failures on the level of performance
Markov, RBD, …
Qualitative analysis of faults/failures propagation
Modelling the impact and propagation of faults/failures on on the
architecture (physical, functional, …)
Structural models, AADL, …
Assessment (correctness, performance) of FDIR
Modelling the behaviour of the FDIR
State machines, temporised automata, model-checking, …
Soundness, completeness of the safety, dependability arguments
Modelling the dependability and safety argumentation
Logical formulas, GSN, …
ETR – 2013 – Toulouse, France, 26-30/8/2013Main types of dependability models
Behaviour (in presence of faults)
Needs for an appropriate abstraction of the behaviour
Behaviour of the system (functional, « dys-functional »)
Behaviour of the fault processing mechanisms
Assembly of functional blocks (on, off, failed, …)
Architecture and fault propagation
Explicit representation of fault propagation, with an abstraction of
the behaviour
Coupling behavioural and structural models
At least for FDIR mechanisms
Impact of faults on behaviour
Impact of reconfigurations on behaviour
ETR – 2013 – Toulouse, France, 26-30/8/2013Quite an old story
Fault Trees
with limitations and solutions
node myComponent
Command
Loss
flow
2.8 1e-9
output : {nominal , failed} : out ;
state
status : {nominal , failed} ; Prim. Command Sec. Command
event Loss Loss
fail;
init
status := nominal ;
trans
gonio2 gonio1 gyro1 sun1 sun2
Eqt BF FM Fonction Dysfonctionnement Effet Local Effets système N A Recommandations TM Maîtrise G C Remarques
status=nominal |− fail −> status := failed ;
3 1 1 CTA_BUS_RECH c/o réchauffeur Absence activation d'un Fonction contrôle thermique erronée T° ligne i 2= SURVEILLANCE 1 R SUR C= la surveillance comporte un
-Activer les réchauffeurs du réchauffeur Poinst localements froids (6 lignes affectées) LVC#XX : Comparaison mesure- seuil haut et un seuil bas
contrôle thermique LVC#XX : Comparaison mesure-commande commande C= 2 cartes RECH_N et RECH_R
Procédure LVC : SYS_ARO en redondance froide dans boîtier
Loss Loss Loss Loss Loss
Passage en mode SAT_SAF 3= SOL PCDU (x2)
assert 3 1 2 CTA_BUS_BUS_RECH
-Activer les réchauffeurs du
c/c réchauffeur MEO protection électrique
PCDU LCL groupe de 6
Disponibilité affectée
Fonction contrôle thermique erronée
Poinst localements froids (6 lignes affectées)
T° ligne i, j, k
…
Possibilité d'utiliser la carte
RECH_B
2= SURVEILLANCE
LVC#49 : Comparaison mesure-
1 R SUR C= la surveillance comporte un
seuil haut et un seuil bas
output=status ; 1e-4 1e-4 1e-4
contrôle thermique pertes de 6 réchauffeurs LVC#XX : Comparaison mesure-commande
Procédure LVC : SYS_ARO
Passage en mode SAT_SAF
Disponibilité affectée 1e-4 1e-4
commande
3= SOL
Possibilité d'utiliser la carte
C= 2 cartes RECH_N et RECH_R
en redondance froide dans boîtier
PCDU (x2)
RECH_B
4 1 1 CT_BUS_TH Informations capteurs Paramètres Thermistances Aucun effet au permier ordre R= Evaluer la possibilité de T° ligne i 1= PROTECTION 1 R P C= ES_A reçoit TH_A, TH_C
-Fournir les TH canal 1 du erronées (ES_A) erronés voie A ou voie B Vote majoritaire poursuivre la mission quelle Vote majoritaire (2/3) C= ES_B reçoit TH_B
contrôle thermique que soit lles lignes TH C= le vote majoritaire permet
affectées d'éviter une reconfiguration et
R= Statuer sur permet de tolérer des pannes
programmation du CTA en croisées sur différentes lignes
mode survie
4 1 2 CT_BUS_TH Informations capteurs Paramètres Thermistances Aucun effet au permier ordre R= Evaluer la possibilité de T° ligne i 1= PROTECTION 1 R P C= ES_A reçoit TH_A, TH_C
-Fournir les TH canal 1 du erronées (ES_B) erronés voie A Vote majoritaire poursuivre la mission quelle Vote majoritaire (2/3) C= ES_B reçoit TH_B
contrôle thermique que soit lles lignes TH C= le vote majoritaire permet
affectées d'éviter une reconfiguration et
R= Statuer sur permet de tolérer des pannes
programmation du CTA en croisées sur différentes lignes
mode survie
6 1 1 MAGNETOMETRE Acquisitions Mesures champ magnétique SAT_NOM: Magnétomètre n/u X MNL: Erreur 2= ERREUR REPORT 3 R C= Magnétomètre utilisé
-Mesurer le champ magnétomètre bloquées inutilisables LVC#XX : Sorties MAG bloquées report LVC#XX : Sorties MAG uniquement en mode ASH (survie
magnétique terrestre sur les 3 Bx, By, Bz (0, …) Erreur report ASH: bloquées et première acquisition)
axes Bx, By, Bz ASH : Bx, By, Bz pour calcul loi Bpoint Reconfiguration C= Magnétomètre redondé
perte des fonctions : Mesures de champ magnétique automatique ACQUISITION/ASH C= surveillance magnétomètre
Mode ASH erroné SURVIE 2= SYS_ARO entraîne erreur report en MNL
Non convergence STAB LVC#XX : Sorties MAG (information sol uniquement)
LVC#XX : Sorties MAG bloquées bloquées
Procédure LVC : SYS_ARO
Pass
AltaRica
Markov Chains
Mu
Mu
AADL GSPN Mu
Cf. Ana-Elena Rugina PhD, 2007
ETR – 2013 – Toulouse, France, 26-30/8/2013Main advantages
Support to model creation, discussion, validation
Additional capabilities (property validation, …)
Easier updates
Coupling with other models
Could/should we go further?
What about correctness of
fault tolerance mechanisms?
ETR – 2013 – Toulouse, France, 26-30/8/2013Objectives & Constraints
Need: Model the system dynamics in the presence of faults
Define a modelling technique
Express faults and failures propagation
Specify Fault, Detection, Isolation and Recovery mechanisms
Demonstrate properties on Dependability/FDIR
Appropriate modelling languages & tools
ETR – 2013 – Toulouse, France, 26-30/8/2013Requirements on modelling techniques (1/2)
Function
Deployment on resources
Resource Function
Functional dependencies
Function
Resource Spread FDIR functions
Recover Detect FDIR Hierarchy
Resource
Functional & Dysfunctional
FDIR time constraints
Detect Recover
FDIR
Delegate
ETR – 2013 – Toulouse, France, 26-30/8/2013Requirements on modelling techniques (2/2)
Design objectives Validation objectives
• Simple (compositional) modelling method • Demonstration
• Close to the engineering model
Architecture/Behaviour
(AADL)
Deployment on resources
Transformation
Functional dependencies Timed automata
(UPPAAL)
Spread FDIR functions
FDIR Hierarchy
Time constraints
ETR – 2013 – Toulouse, France, 26-30/8/2013Modelling method – Dependability pattern
FDIR MODELS
Transient/
Permanent
FAULT
event MODELS Confirmation
idle recovery Fault
Fault
FAULT
alteration PROPAGATION
detection MODELS recovery
firing
Degradation Error Failure
Nominal
Recovery
mode Failure
Failure
Failure
mode
FAILURE
mode
Nominal Nominal
mode MODELS
mode mode Recovery
Degraded
Nominal mode
mode
ETR – 2013 – Toulouse, France, 26-30/8/2013Modelling method
FDIR
F4 :Data1 absent
=> {Data/ absent/…}
f4 fm4 F4 f5 fm5 F5
f4: => {resource/processor/computing/…}
F12
F11 F3
F1 : total loss of computing power
fm2 F0 fm3
=> {resource/processor/computing/…}
fm0
f1 f3
f0
f1 : CPU internal fault
=> {resource/ processor/ computing/…}
ETR – 2013 – Toulouse, France, 26-30/8/2013Model transformation
AADL metamodel AADL behavior annex
(.ecore) metamodel (.ecore)
AADL model (.xmi)
Kermeta program
Transformation
Transformation Generation
rules
UPPAAL
UPPAAL metamodel configuration
UPPAAL model (.xmi)
(.ecore) (.xml)
ETR – 2013 – Toulouse, France, 26-30/8/2013Model reduction – fault isolation
FDIR F61
F41 f61 fm6 f62 F51
FDIR fm4 fm5
f41 f42 f43 f51 f52 f53
F01 F02 F03 F11 F12 F13 F21 F31 F32
fm0 fm1 fm3
fm2
f0 f1 f2 f3
Device 1 Device 2 Device 4 Device 5
ETR – 2013 – Toulouse, France, 26-30/8/2013Model reduction – Step by step validation
FDIR FDIR recovery
f1 fm1 F1 f2 fm2 F2
{active} {Nominal} {idle} {active} {Nominal} {idle} T0 = 0
Find the earliest Find
t suchthe earliest t1 such Itthat
that is true at t
f1 fm1 F1 f2 fm2 F2 T0 = t
{failed} {failed} {failed} {active} {Nominal} {idle}
{failed} {failed} {failed} {failed} {failed} {failed}
Slowest recovery time(t2) < Fastest propagation time(t1)
Find the latest t2 such that
f1 fm1 FDIR FDIR
{failed} {failed} {confirmed} {recovery}
ETR – 2013 – Toulouse, France, 26-30/8/2013To summarize…
Systematic modelling method for dependability and FDIR
Compositional (dependability pattern)
Incremental (functional, dependability and FDIR layers)
Extensible (enhancement of deduced propagation paths)
Demonstrable (model simulation and model checking)
Complex propagation, common mode faults, external events, …
Method improvements
Model reduction techniques, possibly resolution techniques
Complete libraries (fault models, failure modes, propagation rules)
Integration into company’s processes
Articulation of FDIR, Dependability, Engineering processes
Place of simulation, formal validation
Tools, methods benchmarking, training
ETR – 2013 – Toulouse, France, 26-30/8/2013Outline
Dependability in space
Constraints, needs, solutions, achievements
Dependability (FDIR) process
Model Based Dependability
Engineering, Assessment
Why it may become so complicated?
ETR – 2013 – Toulouse, France, 26-30/8/2013Hybrid models
Structure / Behaviour
Behaviour: Discrete logic + continuous
Decoupling possible but based on a priori hypotheses which
must be validated, cannot be exhaustive, hardly systematic
and anyway limited by the actual interactions
Interest of coupling, integrating models
Limitations of current tools and even theoretical
framework to support comprehensive and accurate
simulations… and even more proofs
ETR – 2013 – Toulouse, France, 26-30/8/2013Why we need at least time(s)
Explicitly used by FDIR mechanisms (implicit
coupling, enforcement of the desired organisation,
sequencing, hierarchy)
Sort of “pivot” notion between the discrete logics
and the continuous physical phenomena
Explicit incorporation of the temporal
characteristics of failures
Transient, intermittent…
Possibly some other interesting though speculative ideas
about time and failures
ETR – 2013 – Toulouse, France, 26-30/8/2013Time and failures
Notion of resistance, during some time, to faults
Explicit property in security
Less usual though possibly interesting for accidental faults
See also the built-in resistance to exceptional environmental
conditions
Notion of “trajectory of failures”
“Mortal Byzantine”, cf. Josef Widder, Martin Biely, Günther
Griddling, Bettina Weiss, TU Wien, DSN 2007
Notion of safety margin for dynamic systems
Recent and on-going PhD studies (Amina Mekki-Mokhtar,
Mathilde Machin, LAAS-CNRS, Toulouse, Supervised by D.
Powell, J. Guiochet)
ETR – 2013 – Toulouse, France, 26-30/8/2013It is a long way to space
Factory,
Road…
No source of failure
should be overlooked
ETR – 2013 – Toulouse, France, 26-30/8/2013Space Systems Dependability Industrial Challenges Jean-Paul Blanquart ASTRIUM Satellites Jean-paul.blanquart@astrium.eads.net ETR - 2013 Toulouse, France, 26-30/8/2013
Vous pouvez aussi lire