Tir Laser Run et Para Laser Run - Tir Laser en mode DV Guide pédagogique conceptuel - Mix handi-Cap sur la Vie
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Tir Laser Run et Para Laser Run
Guide pédagogique conceptuel
Du
Tir Laser en mode DV
Saison 2021-2022
Dispositif téléphone monté sur adaptateur de l’arme
Sommaire
Introduction
Description du dispositif proto expérimental « version Alpha opérationnelle »
Bref historique
Première étape
Etapes suivantes
Un mot sur :
-Ecole Polytechnique
-CMAP
-FABLAB
-MCV
-le Tir Sportif
Préambule
Contexte du projet
Contraintes sanitaires
Mode de fonctionnement
-présentiel
-distanciel
Points de rencontre
Tests et validation
1 – Généralités.
1.1 composition d’un pack de tir mode DV
1.2 pack de base
1.2.1 pack PENTASHOT
1.2.2 pack ECOAIMS
1.3 liste des modules d’un pack
1.3.1 Module 1 :système de réglage de l’arme native
1.3.2 Module 2 Support de réglage du pointeur
1.3.3 Module 3 Réglage canon laser
1.3.4 Module 4 Socle de calibrage
1.3.5 Module 5 Finalisation du calibrage
1.3.6 Module 6 Cible de calibrage
1.3.7 Module 7 Dispositif électronique
1.3.8 Module 8 boitiers protections dispositif1.3.
1.3.9 Module 9 alimentations
2 – Module 1 : Système de réglage de l’arme.
2.1 Système de réglage de l’arme
2.2 Rappel réglage d’organes de visée
2.3 Généralités
2.4
3 – Module 2 : Support de réglage du pointeur.
3.x description pointeur laser fixe
3.x description du rail de tisserand
3.x fixation du pointeur
3.x réglage du pointeur
4 – Module 3 : Réglage canon laser
4.1 Positionnement du socle
4.2 Dispositif avec cible Hit-Miss
4.3 Dispositif avec cible LT-600
4.4 Verrouillage
Chapitre 5 - Module 4 : : Socle de calibrage
5.1 Structure du socle
Chapitre 6 - Module 5 finalisation du calibrage. .
6.1 Montage et fixation du dispositif sur l’arme
6.1 Engagement de l’arme sur le socle
6.2 recherche du point d’impact réel (marge de blanc)
6.3 Verrouillage du positionnement
Chapitre 7 - Module 6 cible de calibrage. .
7.1 Arme opérationnelle non assistée
7.2 Réglage du dispositif visuel et sonique de visée
7.3 verrouillage du dispositif
7.4 Vérification des tirs
7.5 Refaire réglage si incorrect
7.6 Test corrects – dégager l’arme du support
7.7 La poser sur son support de repos
Chapitre 8 – Module 7 Dispositif électronique (téléphone)
8.1 Montage du téléphone sur l’adaptateur spécifique
8.2 Vérifier l’attachement
8.3 Connecter l’alimentation secondaire
8.4 support de repos de l’arme
8.5 réinitialisation des réglages
8.6 rangement des composants
8.7 Vérification des diverses alimentations
Chapitre 9 – Module 8
9.1 Composants adaptateur
9.1 Adaptateur PENTASHOT
9.2 Adaptateur ECOAIMS
9.3 Elément commun
Chapitre 10 – Module 9 Alimentations
Chapitre 11 – Module 10 - Densité des fils
11.1 Types de filaments utilisés
11.1.1 Filament PLA rouge
11.1.2 Filament PLA Rose
11.1.3 Filament PLA Jaune
11.1.4 Filament PLA Gris
11.1.5 Filament PLA Vert
11.1.6 Filament PLA Bleu
11.1.7 Filament PLA Violet
11.1.8 Filament PLA Tricolore
11.2 Densités et longueurs en filaments d'impression 3D
Chapitre 12 – Imprimante 3D.
Contexte
12.1 Investissements projet
- Creality Ender 3
-Artillery X1 V4.2
-Filaments PLA
12.2 Imprimante Creality Ender 3
12.2.1 Caractéristiques
12.3 Imprimante Artillery X1 V4.2
12.3.1 caractéristiques
Chapitre 13 – Logiciels systèmes et 3D
13.1 Plateformes de développement
13.1.1 Mac
13.1.2 Windows
13.1.3 Linux
13.2 Logiciel CAO
13.3 Logiciel Imprimante 3 D
13.3.1 CURA
Chapitre 14 Dispositif sur téléphone
14.1 Historique du développement des prototypes
14.2 Investissement téléphone ONEPLUS Nord 10 5G
14.2.1 Caractéristiques techniques
14.3 Applications embarquées
Chapitre 15 Support technique et maintenance
Chapitre 16 Sites pilotes
16.1 Définition d’un site pilote
16.2 Dotation d’un site pilote
16.2 Composition du pack
16.3 Fonctionnement du site pilote
16.4 support technique du site pilote
16.5 Convention renouvelable
Chapitre 17 Déploiement
……etc….etc…..
Introduction
Description du dispositif proto expérimental « version Alpha opérationnelle »
Dans cette phase de terminaison du stage conventionnel de Morgane, nous disposons à ce jour, d’un
dispositif expérimental en version Alpha.
Ce dispositif sera prochainement engagé dans des démonstrations au cours de divers évènements.
Description résumée du proto ATATOS-PLR 1
L’application expérimentale est embarquée dans un téléphone de type « Smartphone.
Cette application s’appuie sur le socle commun appelé « MULTISENSE »
Les divers capteurs du téléphone fournissent à l’application les informations utiles pour exercer le tir en
DV.
L’adaptateur du dispositif est conçu pour conserver à l’arme utilisée toutes ses fonctionnalités natives.
De même la cible réelle conserve toutes ses fonctionnalités « standardes ».
Un descriptif plus détaillé se trouve dans le module 7.
Le proto ALPHA expérimental répond au cahier des charges initial.
Pour la version BETA à l’étude, les problèmes identifiés au cours de cette expérimentation vont être
analysés et intégrés dans le processus expérimental à venir, et cela par exemple concerne plus
particulièrement les ressources :
-autonomie alimentation
-puissance de calcul
-performance et précision éloignée
-sonification augmentée
-choix des équipements du dispositif
-etc…
Un bref historique pour mieux comprendre….(selon Morgane)
Première étape :
Lors de ma dernière année de DUT GEII au sein de l’IUT de Cachan, j’ai réalisé un stage de 12 semaines au
CMAP (Centre de Mathématiques Appliquées de Polytechnique).
Ce stage initié par MCV, avait pour but de créer un dispositif permettant à des personnes aveugles de pouvoir
pratiquer le tir sportif.
Ce sport est une discipline du pentathlon moderne et ce projet s’est réalisé en partenariat avec l’association
M.C.V. (Mixhandi cap sur la vie).
Pour ce faire, j’avais à ma disposition un pack de composants dont une carte Raspberry Pi représentant le
cerveau du système, divers capteurs d’orientation sur 3 axes, un ordinateur fixe sous Linux, un module
d’extension pour la carte Raspberry avec un écran Obled, un joystick … ainsi que d’une caméra.
Au cours de ce projet, j’ai commencé par tester différents capteurs afin d’analyser leurs précisions.
J’ai ensuite récupéré les données du capteur choisi sur la carte Raspberry afin de commencer le guidage en
sonorisant les mouvements sur deux des trois axes.
…..à suivre….etc….etc….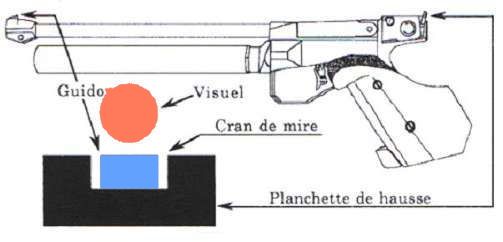
Vous pouvez aussi lire

















































