Travail de Bachelor Surveillance d'une paroi rocheuse à l'aide d'un drone
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Département : EC+G Filière : Géomatique Orientation : Choisissez un élément. Travail de Bachelor Surveillance d'une paroi rocheuse à l'aide d'un drone Non confidentiel Étudiant : Tom Pagnier Travail proposé par : Antoine Guerin Norbert SA Adresse NPA Ville Enseignant responsable : Adrien Gressin Année académique : 2021-2022 Yverdon-les-Bains, le sélectionner une date
Département :EC+G Filière : Géomatique Orientation : Étudiant : Tom Pagnier Enseignant responsable : Adrien Gressin Travail de Bachelor 2021-2022 Surveillance d'une paroi rocheuse à l'aide d'un drone Résumé publiable Cliquez ou appuyez ici pour entrer du texte. Étudiant : Date et lieu : Signature : Tom Pagnier …………………………………… …………………………………… Enseignant responsable : Date et lieu : Signature : Adrien Gressin …………………………………… …………………………………… Norbert SA : Date et lieu : Signature : Antoine Guerin …………………………………… …………………………………… I
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Préambule Ce travail de Bachelor (ci-après TB) est réalisé en fin de cursus d’études, en vue de l’obtention du titre de Bachelor of Science HES-SO en Ingénierie. En tant que travail académique, son contenu, sans préjuger de sa valeur, n'engage ni la responsabilité de l'auteur, ni celles du jury du travail de Bachelor et de l'Ecole. Toute utilisation, même partielle, de ce TB doit être faite dans le respect du droit d’auteur. HEIG-VD Le Chef du Département Yverdon-les-Bains, le 01 juillet 2022. II

TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Authentification Le soussigné, Tom Pagnier, atteste par la présente avoir réalisé seul ce travail et n’avoir utilisé aucune autre source que celles expressément mentionnées. Yverdon-les-Bains, le 01 juillet 2022. Tom Pagnier III

TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Table des matières 1 Contexte du travail de bachelor (Cahier des charges) ..........................................................................................2 1.1 Introduction ..................................................................................................................................................2 1.2 Objectifs ........................................................................................................................................................2 1.3 Rendus finaux ...............................................................................................................................................2 2 Principe théorique ................................................................................................................................................3 2.1 Photogrammétrie .........................................................................................................................................3 2.1.1 Avantages de la photogrammétrie .......................................................................................................3 2.1.2 Composition d’une caméra numérique ................................................................................................3 2.1.3 Résolution du relevé photogrammétrique ...........................................................................................5 2.1.4 Calcul d’aérotriangulation ....................................................................................................................5 2.2 Plan de vol ....................................................................................................................................................6 3 Processus Global pour la détection de chutes de blocs .......................................................................................7 4 Choix du matériel ..................................................................................................................................................8 4.1 Choix du drone adéquat au projet................................................................................................................8 4.1.1 Analyse des caractéristiques techniques ..............................................................................................8 4.1.2 Représentation des caractéristiques des drones sur un paroi théorique ............................................9 4.1.3 Avantages de chaque drone ...............................................................................................................10 4.1.4 Acquisition de données de comparaison............................................................................................11 4.1.5 Drone retenu ......................................................................................................................................12 4.2 Logiciels utilisés ..........................................................................................................................................13 4.2.1 Agisoft Metashape..............................................................................................................................13 4.2.2 Langage de programmation python ...................................................................................................13 4.2.3 CloudCompare ....................................................................................................................................13 4.2.4 Interface graphique : PySide2 (QtDesigner) .......................................................................................14 5 Automatisation du traitement des données ......................................................................................................14 5.1 Calcul et traitement des données d’un état unique ...................................................................................14 5.1.1 Ajout des données photogrammétriques...........................................................................................14 5.1.2 Alignement des images.......................................................................................................................14 5.1.3 Génération du nuage de points dense ...............................................................................................16 5.2 Calcul et traitement des données de deux états simultanés .....................................................................17 5.2.1 Ajout des données et alignement des images ....................................................................................17 5.2.2 Génération des nuages denses et interface graphique ......................................................................19 6 Détection des chutes de blocs ............................................................................................................................19 6.1 Solutions potentielles pour l’analyse des chutes de blocs .........................................................................19 6.1.1 Distances entre maillage et nuage .....................................................................................................19 IV

TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 6.1.2 Distances entre deux nuages de points ..............................................................................................20 6.1.3 M3C2 : Comparaison multi-échelle modèle à modèle de nuages ......................................................21 6.2 Comparaison des méthodes de détection pour un cas concret .................................................................21 6.2.1 Acquisition de données de test ..........................................................................................................21 6.2.2 Traitement des données de test .........................................................................................................22 6.2.3 Comparaison des méthodes de détection..........................................................................................22 6.2.4 Choix de la méthode de détection .....................................................................................................24 6.2.5 Implémentation de la détection de chutes de blocs dans le script ....................................................24 6.2.6 Présentation de l’interface pour la détection de chutes de blocs......................................................25 7 Visualisation de la détection de chutes de blocs ................................................................................................25 7.1 Colorisation des points du nuage ...............................................................................................................25 7.2 Méthodes de visualisation ..........................................................................................................................26 7.2.1 Nuage colorisé ....................................................................................................................................26 7.2.2 Maillage ..............................................................................................................................................26 8 Automatisation de la préparation de plan de vol ...............................................................................................27 8.1 Données Lidar : SwissSURFACE3D ..............................................................................................................27 8.1.1 Téléchargement des données ............................................................................................................27 8.1.2 Présentation et utilisation de l’interface ............................................................................................28 8.2 Données Nadir ............................................................................................................................................28 8.2.1 Acquisition des données .....................................................................................................................28 8.2.2 Présentation et utilisation de l’interface ............................................................................................29 8.2.3 Erreur de reconstruction de maillage .................................................................................................29 8.3 Calcul de plan de vol ...................................................................................................................................30 9 Analyse de chutes de blocs pour un cas d’étude ................................................................................................30 9.1 Présentation du site relevé.........................................................................................................................30 9.2 Calcul de plan de vol et acquisition des données .......................................................................................31 9.3 Traitement des données .............................................................................................................................32 9.4 Détection des chutes de blocs ....................................................................................................................33 9.5 Visualisation des résultats ..........................................................................................................................33 10 Relevé de l’état initial d’une paroi rocheuse ......................................................................................................34 10.1 Présentation du site : Oberems ..................................................................................................................34 10.2 Acquisition des données .............................................................................................................................34 10.3 Traitement des données .............................................................................................................................35 11 Utilisation des scripts ..........................................................................................................................................36 11.1 Compatibilité et installation des logiciels et librairies python ...................................................................36 11.2 Recommandations pour l’utilisation du script de préparation de plan de vol ...........................................37 11.3 Recommandations pour l’utilisation du script de détection de chutes de blocs .......................................37 V
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 12 Conclusion...........................................................................................................................................................38 12.1 Améliorations possibles des scripts ............................................................................................................38 12.1.1 Améliorations de la détection de chutes de blocs .............................................................................38 12.2 Problèmes potentiels des scripts ................................................................................................................38 13 Conclusion...........................................................................................................................................................39 Annexes ......................................................................................................................................................................40 Table des illustrations Figure 1 : Schéma d'une caméra – www.guslegusphoto.com......................................................................................3 Figure 3 : Types d'obturateur - www.photometrics.com .............................................................................................4 Figure 4 : Aérotriangulation - Encyclopædia Universalis France ..................................................................................5 Figure 5 : Exemple de plan de vol .................................................................................................................................6 Figure 6 : Processus de détection de chutes de blocs ..................................................................................................7 Figure 7 : Comparaison des drones - Phantom 4 RTK, Mavic Pro 2, Anafi AI ...............................................................8 Figure 8 : Caractéristiques des drones .........................................................................................................................8 Figure 9 : Représentation des caractéristiques des drones sur une paroi théorique ..................................................9 Figure 10 : Déplacement du drone selon le temps d'exposition et la vitesse de vol .................................................10 Figure 11 : Analyse de la qualité des images des drones ...........................................................................................11 Figure 12 : Analyse de la génération des maillages de chaque drone .......................................................................12 Figure 13 : Résumé de la comparaison des drones ....................................................................................................12 Figure 14 : Logo Agisoft Metashape ...........................................................................................................................13 Figure 15 : Logo Python ..............................................................................................................................................13 Figure 16 : Logo CloudCompare .................................................................................................................................13 Figure 17 : Interface graphique de l'ajout des données .............................................................................................14 Figure 18 : Alignement des images sur Agisoft (1) .....................................................................................................15 Figure 19 : Alignement des images sur Agisoft (2) .....................................................................................................15 Figure 20 : Exemple d'alignement d'images ...............................................................................................................15 Figure 21 : Interface graphique de l'alignement des images .....................................................................................16 Figure 22 : Génération d'un nuage dense sur Agisoft ................................................................................................16 Figure 23 : Interface de génération de nuage dense..................................................................................................17 Figure 24 : Processus d'alignement à partir d'un état géoréférencé .........................................................................17 Figure 25 : Processus d'alignement de deux états simultanément ............................................................................18 Figure 26 : Interface d'alignement de deux états.......................................................................................................18 Figure 27 : Interface de génération de nuage de deux états .....................................................................................19 Figure 28 : Distance entre maillage et nuage - www.cloudcompare.org ...................................................................20 Figure 29 : Distance entre deux nuages - www.cloudcompare.org ...........................................................................20 Figure 30 : Distance par M3C2 - www.mdpi.com .......................................................................................................21 Figure 31 : Blocs de test ..............................................................................................................................................21 Figure 32 : Plan de vol du cas d'étude ........................................................................................................................22 Figure 33 : Analyse des nuages avec et sans blocs .....................................................................................................22 Figure 34 : Visualisation distances entre maillage et nuage ......................................................................................23 Figure 35 : Visualisation distances entre deux nuages ...............................................................................................23 Figure 36 : Visualisation distances par M3C2 .............................................................................................................23 Figure 37 : Interface de comparaison d'états .............................................................................................................25 Figure 38 : Erreur de génération automatique de maillage .......................................................................................26 VI
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Figure 39 : Génération manuelle du maillage ............................................................................................................26 Figure 40 : Paramètres de génération du maillage ....................................................................................................26 Figure 41 : Interface préparation plan de vol depuis Lidar ........................................................................................28 Figure 42 : Interface préparation plan de vol depuis un vol Nadir .............................................................................29 Figure 43 : Préparation plan de vol - Paramètres de génération d'un maillage.........................................................29 Figure 44 : Emprise cas d'étude ..................................................................................................................................30 Figure 45 : Emplacement des blocs de test ................................................................................................................31 Figure 46 : Blocs de test ..............................................................................................................................................31 Figure 47 : Paramètres d'alignement des états du cas d'étude .................................................................................32 Figure 48 : Paramètres d'alignement des états du cas d'étude .................................................................................32 Figure 49 : Nuage de points - état comparatif............................................................................................................32 Figure 50 : Nuage de points - état de référence.........................................................................................................32 Figure 51 : Paramètres de comparaison d'états du cas d'étude ................................................................................33 Figure 52 : Visualisation de la détection des blocs .....................................................................................................33 Figure 53 : Visualisation de la détection d'un unique bloc .........................................................................................34 Figure 54 : Plan de vol de la paroi d'Oberems ............................................................................................................35 Figure 55 : Paramètres d'alignement de la paroi d'Oberems.....................................................................................35 Figure 56 : Paramètres de génération du nuage de points de la paroi d'Oberems ...................................................35 Figure 57 : Nuage de points de la paroi d'Oberems ...................................................................................................36 VII

TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Bibliographie Théorie : • Maurice CARBONNELL, « PHOTOGRAMMÉTRIE », Encyclopædia Universalis [en ligne], 2022, https://www.universalis.fr/encyclopedie/photogrammetrie/ • Michel Kasser et Yves Egels, « Photogrammétrie numérique », 2001, https://www.academia.edu/20606086/Photogramm%C3%A9trie_Num%C3%A9rique Caractéristiques des drones : • Mavic Pro 2 : https://www.dji.com/ch/mavic-2/info • Phantom 4 RTK : https://www.dji.com/ch/phantom-4-rtk/info • Anafi AI : https://www.parrot.com/us/drones/anafi-ai/technical-documentation/photogrammetry • Jay Mulakala, « Measurement Accuracy of the DJI Phantom 4 RTK & Photogrammetry », https://www.gim-international.com/files/23b0ad77f81a0aa56e8c83f8c4300270.pdf Support informatique : • Metashape Python Reference, version 1.8.3 (16/04/2022) : https://www.agisoft.com/pdf/metashape_python_api_1_8_3.pdf • CloudCompare Command line mode, version 2.13 : https://www.cloudcompare.org/doc/wiki/index.php/Command_line_mode • Laspy (librairie python), version 2.0 : https://laspy.readthedocs.io/en/latest/ • PySide2 (interface), version 5.15 : https://pypi.org/project/PySide2/ Détection des chutes de blocs : • CloudCompare, Distances Computation, 2021 : https://www.cloudcompare.org/doc/wiki/index.php/Distances_Computation • Dimitri Lague, Nicolas Brodu, Jérôme Leroux, « Accurate 3D comparison of complex topography with terrestrial laser scanner : application to the Rangitikei canyon (N-Z) », 2013, https://arxiv.org/ftp/arxiv/papers/1302/1302.1183.pdf • Theodore B. Barnhart, Benjamin T. Crosby, « Comparing two methods of surface change detection on an evolving thermokarst using high-temporal-frequency terrestrial laser scanning, Selawik River, Alaska », 2013, https://www.researchgate.net/publication/258811624 • Paul-Mark DiFrancesco, David Bonneau, Jean Hutchinson, « The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds », 2020, https://www.mdpi.com/2072-4292/12/11/1885/htm • Rongjun Qin, Jiaojiao Tianc, Peter Reinartzc, « 3D change detection – approaches and applications », https://elib.dlr.de/107163/1/Qin_3D-change-detection-approaches-and-applications-ueqeb5%20(2).pdf VIII

TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) Remerciements : Tout d’abord, je souhaite remercier M. Adrien Gressin, professeur en photogrammétrie à la HEIG-VD, pour le suivi continu lors de ce travail de bachelor et pour ses conseils précieux permettant la réalisation de ce projet. Je souhaite ensuite remercier M. Jason Bula, assistant en photogrammétrie, pour son aide apporté lors de Je souhaite également remercier M. Maximin Bron pour m’avoir accompagné lors de l’acquisition des données d’une paroi rocheuse et pour ses conseils apportés lors de la soutenance de mi-parcours. Enfin, je souhaite remercier M. Antoine Guerin et l’entreprise Norbert SA pour le sujet proposé et pour l’explication des attentes de ce travail, notamment lors de la soutenance de mi-parcours. 1
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 1 CONTEXTE DU TRAVAIL DE BACHELOR (CAHIER DES CHARGES) 1.1 INTRODUCTION Ce travail de bachelor a pour objectif de réaliser un logiciel permettant d’automatiser la surveillance de parois rocheuses afin d’étudier les potentielles chutes de blocs. L’analyse des changements se fera à l’aide de relevés photogrammétriques acquis par drone entre deux états distincts d’une même paroi. Cela devra permettre de détecter, dans un premier temps, des chutes de blocs d’au moins 10 cm3. Les huit semaines consacrées à la réalisation de ce TB comprendront alors l’acquisition de données « test », la réalisation du logiciel et de ses scripts, puis l’écriture du rapport et des différentes aides utiles aux futurs utilisateurs de ce processus. 1.2 OBJECTIFS Dans un premier temps, l’objectif sera d’étudier les caractéristiques techniques de différents drones afin de déterminer le plus adéquat au projet en fonction de la précision souhaitée permettant la détection de chute de blocs. Le choix sera donc principalement fait en fonction des limites de résolution des drones et des contraintes spécifiques du lieu relevé (hauteur de vol, temps de vol…). L’objectif final sera d’automatiser le maximum d’étapes pour permettre à tout un chacun d’utiliser le projet sans difficulté. Afin de détecter les chutes de blocs, le logiciel devra comparer deux états différents de la paroi : l’état de référence (état au temps « 0 ») et l’état de comparaison (état à posteriori). Ainsi, le logiciel devra comprendre, dans la mesure du possible : • Le calcul et l’exportation du plan de vol à effectuer avec le drone o Qui devront être effectués avant l’acquisition des données de l’état de référence o Qui serviront à l’acquisition des données des différents états • La création des nuages de points géoréférencés grâce au relevé photogrammétrique pour chaque état • La comparaison des nuages afin d’étudier les changements, c’est-à-dire les chutes de blocs • La visualisation des résultats o Étudier les différentes possibilités de visualisation des chutes de blocs o Proposer une visualisation conforme aux attentes de l’utilisateur Enfin, une interface graphique interactive et ergonomique facilitera l’exécution du logiciel par l’utilisateur. 1.3 RENDUS FINAUX Le travail de bachelor se conclura par la livraison de plusieurs éléments permettant la compréhension et l’exécution du logiciel de surveillance de parois rocheuses. Ainsi, les éléments finaux seront : • Le rapport du travail de bachelor et ses annexes • Le logiciel et ses scripts d’automatisation • Le manuel d’utilisation des scripts de surveillance d’une paroi rocheuse 2
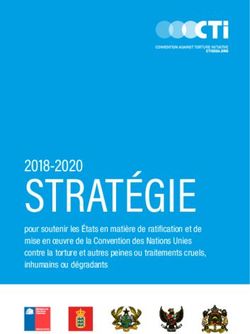
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 2 PRINCIPE THÉORIQUE Ce chapitre a pour objectif d’expliquer les différents aspects théoriques utilisés pour ce travail de bachelor. 2.1 PHOTOGRAMMÉTRIE La photogrammétrie représente « l’ensemble des techniques qui permettent de déterminer la forme, les dimensions et la position d'un objet (au sens le plus large du terme) à partir de perspectives de cet objet enregistrées photographiquement » (Maurice Carbonell, 2022). Cette technique de mesure repose donc sur l’acquisition d’images bi-dimensionnelles à l’aide d’une caméra. La prise de photographie pour ce travail de bachelor sera faite par drone. 2.1.1 Avantages de la photogrammétrie L’utilisation de la photogrammétrie par drone possède de multiples avantages comparés aux méthodes plus traditionnelles tel que les scanner lasers. En effet, outre le prix généralement plus avantageux des drones, l’avantage premier réside dans la possibilité de relevé des endroits difficilement accessible à l’humain. Les scanners lasers sont alors peu adaptés pour le relevé d’une paroi rocheuse de par sa verticalité et sa topographie complexe. 2.1.2 Composition d’une caméra numérique Les drones modernes permettant d’effectuer des relevés photogrammétriques possèdent des caméras numériques. Chaque caméra possède des caractéristiques propres qui détermine, en partie, la qualité de la précision des objets relevés. Il est alors important d’étudier ces caractéristiques afin de déterminer si le drone répond aux attentes de résolution. Figure 1 : Schéma d'une caméra – www.guslegusphoto.com Le principe de photographie par caméra numérique consiste à capturer les signaux lumineux qui passent au travers d’un objectif afin de les enregistrer grâce à un capteur. Comme le montre l’image ci-dessus, les éléments principaux d’une caméra sont : • Le capteur : composant électronique constitué de cellules photoélectriques (pixels) permettant d’enregistrer les signaux lumineux en données électriques. Ces données, constituées de nombres, peuvent ensuite être traitées et visualisées au moyen d’outils 3
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) informatiques. La qualité d’une image dépend grandement de la taille des photosites et de la résolution du capteur de la caméra. • L’objectif : composé de différentes lentilles, l’objectif est la « porte d’entrée » des signaux lumineux. La longueur de focale, distance entre le capteur et l’objectif, détermine le champ de vision de la caméra, c’est-à-dire la taille des objets sur la photographie (voir image ci- dessous). Cette distance de focale est généralement fixe sur les caméras des drones. Figure 2 : Longueur de focale – www.cewe.be https://www.cewe.be/fr/blog/2019/05/06/tout-savoir-sur-la-distance-focale/ • L’obturateur : élément électronique (sur les drones) qui détermine le temps d’exposition, c’est-à-dire la durée pendant laquelle le capteur va enregistrer les informations des rayons lumineux. On distingue deux types d’obturateurs : o Le global shutter : capture les informations de tous les pixels du capteur en même temps. Permet de photographier des éléments en mouvant et est donc recommandé pour la photogrammétrie par drone (drone en mouvement par rapport à l’objet relevé). o Le rolling shutter : capture les informations de chaque ligne de pixels du capteur à la fois. Ce type d’obturateur est alors déconseillé pour la photogrammétrie par drone puisqu’un objet en mouvement par rapport au drone sera déformé lors de son acquisition. Figure 2 : Types d'obturateur - www.photometrics.com https://www.photometrics.com/learn/advanced-imaging/rolling-vs-global-shutter • Le diaphragme : mécanisme à diamètre variable situé dans l’objectif et permettant de régler la quantité de lumière capturé par la caméra. Cela permet de faire varier la netteté des éléments photographiés en fonction de leurs distances à la caméra. Il est alors possible de régler différents paramètres de la caméra afin d’obtenir une image fidèle aux éléments photographiés : 4
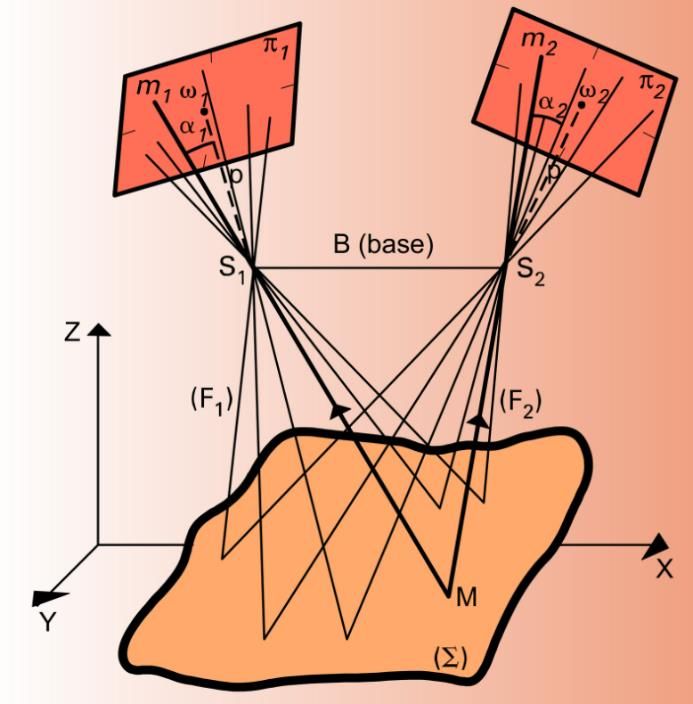
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) • Le temps d’exposition : c’est-à-dire la durée pendant laquelle le capteur va enregistrer les informations des rayons lumineux. Un temps d’exposition court permettra de capturer sans trop de déformation un objet en mouvement mais capturera moins de lumière (et inversement pour un temps d’exposition long). • L’ouverture du diaphragme : permet de régler les niveaux de netteté d’une image, c’est-à-dire la profondeur de champ de la mise au point. Pour la plupart des travaux photogrammétriques, une ouverture de diaphragme maximale est conseillée puisque cela permettra d’obtenir une netteté sur le maximum d’éléments de l’image. • La sensibilité ISO : donne la possibilité aux cellules du capteur d’être plus ou moins sensible à la lumière capturée. Une sensibilité haute permettra d’intensifier la puissance des rayons lumineux mais augmentera le risque de voir apparaître du bruit dans l’image Les caméras proposent un réglage automatique de ces paramètres. Néanmoins, il est intéressant de les analyser à priori d’un relevé pour ne pas obtenir des images bruitées, sur/sous exposées ou déformées. 2.1.3 Résolution du relevé photogrammétrique La précision d’un relevé photogrammétrique dépend principalement de la résolution au sol de la caméra. Cette résolution s’obtient de la manière suivante : Résolution au sol [m] = Distancecaméra/objet [m] / Longueur Focale [px] Il est alors important de déterminer la résolution au sol attendue. Le cahier des charges de ce travail de bachelor précise que l’objectif est de pouvoir détecter des chutes de blocs d’un volume supérieur à 10 cm3. On peut donc en déduire que dans le cas de pierre à forme cubique, la longueur minimale des côtés est d’environ 2.2 cm. Afin de pouvoir modéliser convenablement les blocs, plusieurs points doivent être déterminé dans ce rayon. En analysant les possibilités de différents drones et les méthodes de génération de nuage de points, la résolution nécessaire des caméras a été fixé à 4 mm/pixel. Il sera alors essentiel de déterminer le drone adéquat afin d’obtenir une telle résolution. 2.1.4 Calcul d’aérotriangulation L’aérotriangulation s’appuie sur les principes de la stéréoscopie. L’objectif est de déterminer des points communs entre deux images d’un élément photographié depuis différents points de vue. Ainsi, la distance entre la caméra et le sol ainsi que l’orientation des images entre elles permettent de déduire la position relative des points communs dans les images. Il est alors important d’avoir un taux de recouvrement important entre les images, c’est-à-dire une même zone photographiée entre chaque image. Figure 3 : Aérotriangulation - Encyclopædia Universalis France 5
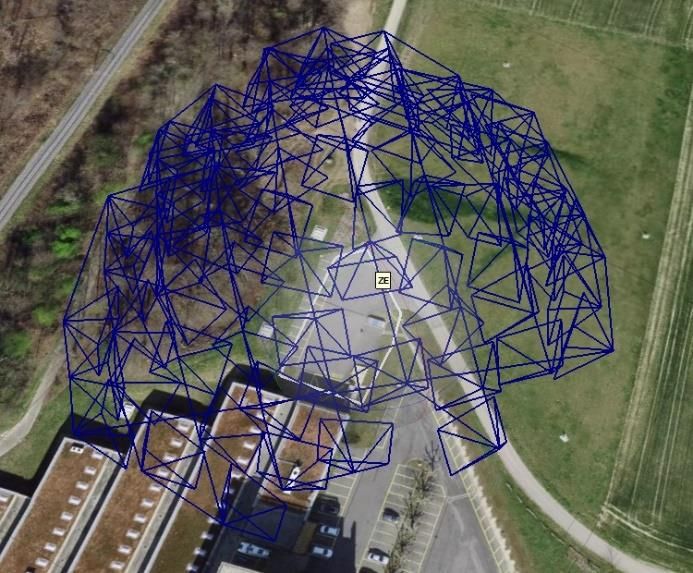
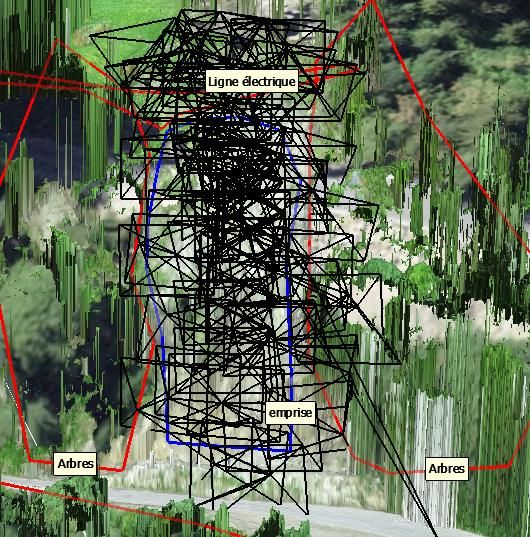
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) La première étape d’un calcul d’aérotriangulation consiste alors à déterminer des points clés facilement reconnaissables dans chaque image de par leurs caractéristiques propres (couleur du pixel, analyse des pixels voisins…). Les points clés de chaque image sont ensuite analysés pour déterminer si des points identiques existent sur les autres images. Lorsqu’une correspondance est établie, le point en question devient un point de liaison. Il est alors possible de déterminer la position relative de ce point dans les images qui le contiennent. Ces points de liaisons sont ensuite utilisés pour définir la position et l’orientation des images entre elle. Enfin, le géoréférencement des coordonnées des images peut se faire grâce à des points d’appuis pouvant être identifiés sur les images. Les coordonnées de ces points sont connues et peuvent être déterminées au préalable du calcul par relevé GNSS ou tachéométrique par exemple. Afin de pouvoir identifier facilement ces points, ils sont généralement représentés par une cible ou par un élément marquant du terrain. Lorsque la position et l’orientation des images sont connues, il est possible de calculer un nuage de points. 2.2 PLAN DE VOL Afin d’effectuer un relevé photogrammétrique par drone, il est important de déterminer un plan de vol. Ce plan de vol donnera à l’appareil un chemin à suivre automatiquement en fonction de la surface relevé et de la forme de l’objet/du terrain. De plus, il permet également de préciser à quel endroit et avec quelle orientation la caméra doit prendre une photographie. Ce plan de vol est déterminé selon la résolution au sol, le taux de recouvrement attendues entre les images et les bandes de la caméra et les caractéristiques de la caméra. Figure 4 : Exemple de plan de vol 6
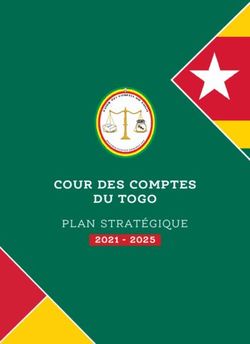
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 3 PROCESSUS GLOBAL POUR LA DÉTECTION DE CHUTES DE BLOCS Afin de pouvoir analyser les chutes de blocs dans une paroi rocheuse, il est important d’établir une chaîne de traitement. La première étape consiste à déterminer le type d’appareil le plus adéquat afin d’effectuer le relevé de la paroi. Dans le cas d’un relevé photogrammétrique, chaque drone détient des caractéristiques qui lui sont propre. Il est alors primordial d’analyser si le capteur de la caméra du drone permet d’effectuer un relevé à la précision souhaitée. Il est ensuite intéressant d’observer les différentes possibilités du drone, tel que la possibilité de créer ou d’importer un plan de vol afin de faciliter la prise de photos, ou encore la présence d’une antenne RTK permettant le géoréférencement de la position des images. Une fois le choix du drone effectué, l’étape suivante consiste à déterminer le plan de vol. Cela permet alors d’effectuer le vol au drone selon les paramètres nécessaires au relevé de la paroi. Une fois les photos acquises, le traitement des données peut commencer. Premièrement, l’alignement des photos a pour but de déterminer et de générer des points communs aux images. Cela permet ensuite de calculer un nuage de points dense grâce à une « depth map » préalablement créée, c’est-à-dire une carte de la profondeur des points. Cette chaîne de traitement est d’abord effectuée pour la paroi à l’état initial (état de référence) puis est de nouveau faite pour la paroi à un état différent (état comparatif) afin d’analyser les potentielles chutes de blocs. La détection de chutes de blocs se fait Figure 5 : Processus de détection de donc une fois que les nuages de points des deux états de la paroi chutes de blocs sont générés. Pour ce faire, les nuages des points des deux états doivent être comparés afin de déterminer les distances entre les points de chaque état. Cela permet ensuite de déterminer les différences apparues afin d’identifier les potentiels chutes de blocs. L’objectif de ce travail de bachelor est alors d’automatiser au mieux le processus afin d’identifier les chutes de blocs dans une paroi rocheuse. 7
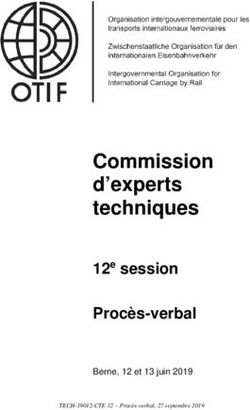
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 4 CHOIX DU MATÉRIEL 4.1 CHOIX DU DRONE ADÉQUAT AU PROJET Afin de pouvoir répondre aux objectifs de ce travail de bachelor, le choix du drone représente un aspect majeur du projet pour détecter au mieux les chutes de blocs. Ce choix dépend alors des caractéristiques techniques de chaque drone et des atouts qui leurs sont propres. Ainsi, les trois appareils suivant, fournis par la HEIG-VD, seront comparés afin de déterminer le plus adéquat au projet : • Le « Anafi AI » de chez « Parrot » • Le « Mavic Pro 2 » de chez « DJI » • Le « Phantom 4 RTK » de chez « DJI » Phantom 4 RTK Mavic Pro 2 Anafi AI Figure 6 : Comparaison des drones - Phantom 4 RTK, Mavic Pro 2, Anafi AI Le choix final du drone dépendra des limites de leur capteur, de leurs avantages spécifiques et se conclura par la comparaison de données photogrammétriques acquises sur un relevé « test ». 4.1.1 Analyse des caractéristiques techniques La première étape consiste à déterminer si chaque drone permet d’acquérir des données avec la résolution de relevé attendue. Le tableau ci-dessous résume les caractéristiques techniques du capteur de chaque drone, qui seront expliquées par la suite. Taille capteur Résolution = 5mm ; Taille d'une photo au Drone Taille capteur [pixel] Taille photosite [mm] Longueur focale [pixel] Prix [CHF] [mm*mm] Distance paroi [m] sol [m*m] Phantom 4 RTK 13.2*8.8 5472*3648 0.0024 3040 15.2 27.4*18.2 5200 Mavic Pro 2 13.2*8.8 5472*3648 0.0024 3440 17.2 27.4*18.2 1200 Anafi AI 6.4*4.9 8000*6000 0.0008 5400 26.9 40.0*30.0 5300 Figure 7 : Caractéristiques des drones La première étape de comparaison consiste à déterminer pour chaque capteur la distance nécessaire entre la paroi rocheuse et le drone afin d’obtenir la résolution attendue. Cette distance s’obtient à l’aide de la formule suivante : [ ] = é [ ] × [ ] Pour garantir une résolution inférieure à 5mm/pixel, les distances entre la paroi et le drone doivent être de : • Distance < 15.2 m pour le « Phantom 4 RTK » 8
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) • Distance < 17.2 m pour le « Mavic Pro 2 » • Distance < 26.9 m pour le « Anafi AI » Ces calculs montrent que le drone « Anafi AI » permet une plus grande liberté quant à la distance entre la paroi et son capteur. Cela est dû à une des tailles des photosites largement plus faible ce qui induit une longueur de focale (en pixel) plus grande permettant ainsi de capturer plus de détails sur les photos grâce à une meilleure résolution. Néanmoins, les distances nécessaires pour le « Phantom 4 RTK » et le « Mavic Pro 2 » ne sont pas contraignantes puisqu’elles permettront de relever la majorité des parois en respectant la résolution minimum. On observe également que le prix du « Mavic Pro 2 » est largement inférieur à celui des deux autres drones, ce qui peut représenter un avantage important pour une entreprise souhaitant acquérir un drone plus abordable. 4.1.2 Représentation des caractéristiques des drones sur un paroi théorique Afin de comparer de manière plus concrète ce que représente les caractéristiques des capteurs, une analyse du plan de vol de ces drones sur une paroi théorique a été effectué pour les paramètres de vol suivant : • Dimension paroi : longueur 200m * hauteur 50m • Taux de recouvrement entre images et entre bandes : 70% • Résolution au sol : 5mm • Vitesse de vol : 3m/s Le taux de recouvrement de 70% permet de relever plus de détails sur la paroi. De plus, il permet également d’obtenir une meilleure précision sur le futur nuage de points puisque plus de points communs seront disponibles entre chaque image. Paroi rocheuse de longueur 200m * hauteur 50 m ; Résolution = 5mm ; Recouvrement = 70% Vitesse Capteur Photos par longueur Photos par hauteur Photos total Temps de vol [min] drone [m/s] Phantom 4 RTK 25 10 250 11 Mavic Pro 2 25 10 250 3 11 Anafi AI 17 6 102 7 Figure 8 : Représentation des caractéristiques des drones sur une paroi théorique Le nombre de photos nécessaires pour relever l’intégralité de la paroi dépend principalement de la distance à la paroi, de la longueur de focale et de la taille du capteur de chaque drone. Ce nombre de photos et la distance à la paroi permettent par la suite de calculer le temps de vol nécessaire pour chaque cas. Avec une plus grande longueur de focale et distance à la paroi, le « Anafi AI » obtient logiquement un nombre total de photos et un temps de vol plus faible. Le temps de vol des autres drones reste toutefois acceptable. Les caractéristiques techniques décrites ci-dessus donnent un avantage au « Anafi AI ». Cependant, les caractéristiques du « Phantom 4 RTK » et du « Mavic Pro 2 » restent tout à fait acceptables et permettent également d’atteindre les exigences de précision attendues. 9
TB – Surveillance d’une paroi rocheuse à l’aide d’un drone (2022) 4.1.3 Avantages de chaque drone Hormis les spécificités techniques du capteur de chaque drone, d’autres aspects rentrent en compte pour comparer chaque appareil. Le premier point observé est le type d’obturateur de chaque caméra servant à régler le temps d’exposition et à déterminer la quantité de lumière capturé par le capteur. Comme décrit dans la partie « Principe théorique », il existe deux types d’obturateur : le global shutter et le rolling shutter. Le global shutter est le plus adapté à la photogrammétrie puisqu’il permet d’enregistrer en même temps les informations de tous les pixels du capteur alors que le rolling shutter enregistre les informations de chaque ligne de pixels du capteur les unes après les autres, induisant alors à une déformation des images. Parmi ces drones, seul le « Phantom 4 RTK » possède un obturateur de type global shutter. Les relevés photogrammétriques avec le « Mavic Pro 2 » et Temps d'exposition [s] 1/8000 1/4000 1/1000 le « Anafi AI » doivent alors être réalisé avec V = 1m/s ; Distance parcourue [cm] 0.0125 0.025 0.1 précaution. Afin de limiter au mieux la V = 2.5m/s ; Distance parcourue [cm] 0.03125 0.0625 0.25 déformation des images, les drones possédant V = 5m/s ; Distance parcourue [cm] 0.0625 0.125 0.5 V = 7.5m/s ; Distance parcourue [cm] 0.09375 0.1875 0.75 un rolling shutter doivent alors avoir une vitesse de vol et un temps d’exposition très faible, Figure 9 : Déplacement du drone selon le temps d'exposition et la vitesse de vol comme le montre le tableau ci-contre. Une autre méthode pour empêcher la déformation des images peut également être d’immobiliser le drone à chaque photographie. Dans les deux cas, le temps de vol nécessaire est augmenté pour les drones possédant un rolling shutter. Deuxièmement, il est important de s’intéresser aux types de plan de vol possible depuis les applications de chaque drone. En effet, il est possible de déterminer préalablement le chemin que le drone doit emprunter pour relever la paroi rocheuse. Les applications de chacun des drones permettent de traiter différemment ces plans de vol. Les drones « Phantom 4 RTK » et « Mavic Pro 2 » peuvent être contrôlé grâce à l’application « DJI Pilot ». Le « Phantom 4 RTK » nécessite tout de même une télécommande spécifique . le « SDK controller ». Le drone « Anafi AI » est quant à lui contrôlé par l’application interne de sa télécommande « Parrot Skycontroller ». Pour « DJI Pilot » et pour le « Parrot Skycontroller », il est possible de réaliser les plans de vol suivants directement dans l’application : • Générer un plan de vol selon l’emprise 2D du projet o Effectue des lignes de vol sur l’emprise de la zone, « horizontalement » au terrain o Ne permet pas de relever des objets 3D tel que des parois • Générer un plan de vol en suivant des points de passage préalablement renseignés o Le drone va alors photographier le terrain à l’emplacement des points indiqués o Plan de vol peu adapté pour le relevé de paroi • Générer un plan de vol « oblique » selon une emprise 2D du projet o Effectue des lignes de vol sur l’emprise de la zone, « horizontalement » au terrain o Capture des photos avec une certaine orientation de la caméra o Capture les éléments du terrain depuis différents points de vue o Permet de relever certains objets 3D mais est peu adapté pour le relevé de paroi 10
Vous pouvez aussi lire