Véhicules autonomes et infrastructure associée: problématique, défis, prospective, indura
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Institut français
des sciences et technologies
des transports, de l’aménagement
et des réseaux
Véhicules autonomes et
infrastructure associée:
problématique, défis, prospective,
projets …
Jacques Ehrlich – Directeur de recherche émérite
IFSTTAR/CoSys/LIVIC
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux
Pourquoi automatiser la conduite ?
Pour une
Pour améliorer
conduite
l’efficacité
ecoresponsable
Pour rendre la
conduite
Pour améliorer la
accessible au
sécurité
plus grand
nombre
Enjeux
L’automatisation est une réponse globale
à 4 enjeux sociétaux importants
08/03/2019 AG INDURA Lyon www.ifsttar.fr 2
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux
Sommaire
• Introduction
• La tâche de conduite : aspects cognitifs et
sensorimoteurs
• Véhicules et automatisation de la conduite
• Infrastructure et itinéraire sécurisé
• Stratégie européenne et feuilles de route
• Les obstacles à surmonter
• Les projets passés ou en cours
08/03/2019 AG INDURA Lyon www.ifsttar.fr 3
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux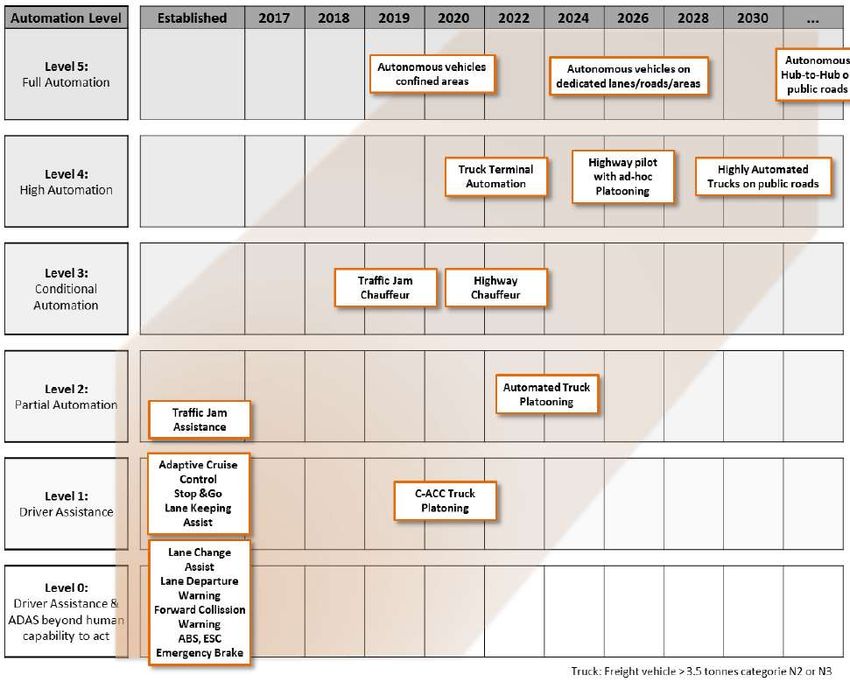
La tâche de conduite : aspects
cognitifs et sensorimoteurs
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux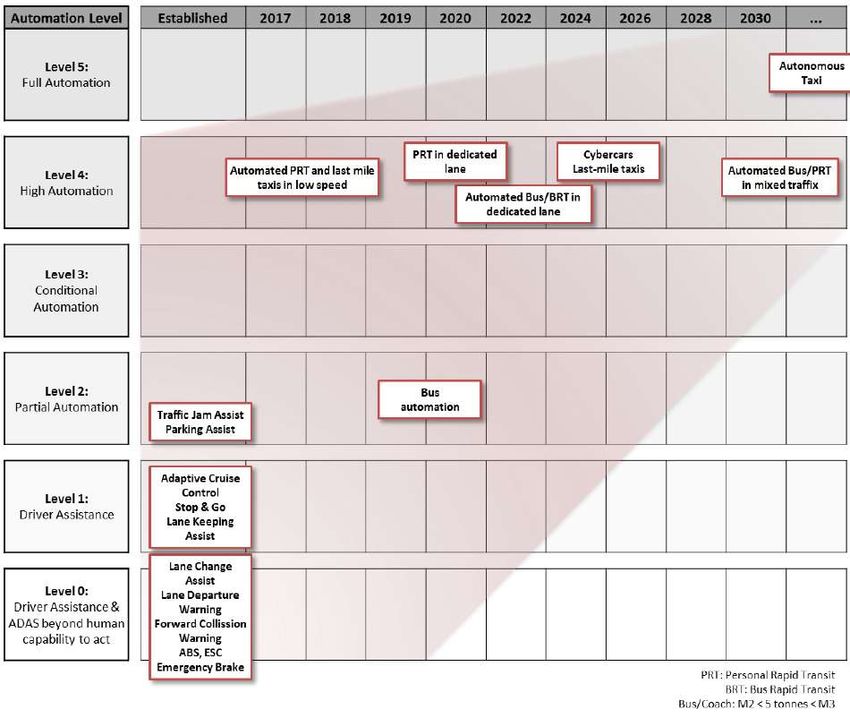
Analyse d’une situation :
freinage brusque du véhicule V1
Actions possibles Risques
Ne rien faire Collision à l’avant (V1)
Freinage d’urgence Collision à l’avant (V1)
Collision à l’arrière (V5)
Evitement par la Collision par le côté (V2)
gauche Perte de contrôle
Evitement par la Collision par le coté avant (V4)
droite Collision par le côté arrière (V6)
Perte de contrôle
- Action réfléchie: le conducteur choisit l’action en
fonction de sa perception de la situation, de sa
capacité d’analyse, de son expérience, de sa
maîtrise du véhicule (sur/sous estimées)
- Action réflexe :il ne choisit pas (déroulement d’un
scénario prédéfini « routinier »)
08/03/2019 AG INDURA Lyon www.ifsttar.fr 5
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux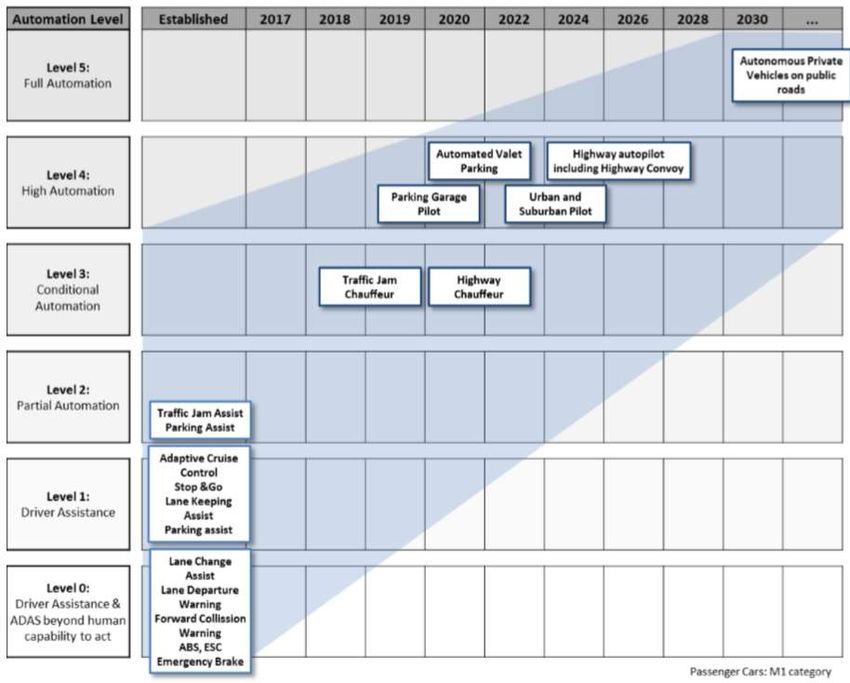
La tâche de conduite
Humain Automate
Capacités sensori-
motrices
Perception Capteurs, V2V
Capacités
cognitives
Analyse Modèles d’évolution
Capacités Modèles de risque et
cognitives
Décision d’aide à la décision
Capacités sensori- Actionneurs,
motrices
Action contrôle-commande
Système fiable = fiabilité de toutes les étapes
Système défaillant = défaillance dans l’une des étapes
08/03/2019 AG INDURA Lyon www.ifsttar.fr 6
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux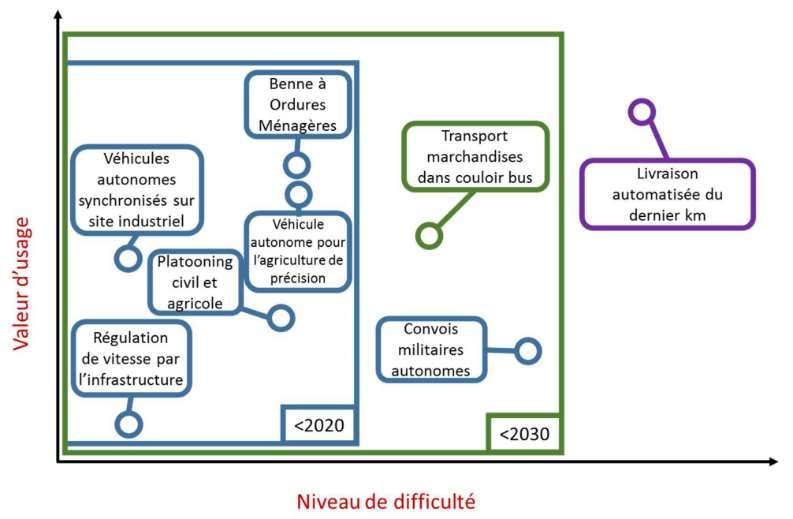
Véhicules autonomes :
de quoi parle-t-on ?
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux
Les grandes catégories de
système
• Les systèmes avancés d’aides à la conduite (ADAS) et systèmes
co-pilotes
• Objectif confort : faciliter la conduite
• Exemples : régulateur de vitesse (CC), assistance au parking
• Objectif sécurité : pallier les défaillances du conducteur
• Exemples : freinage d’urgence (EB), assistance au maintient
sur la voie(LKA), prévention de sortie de route (LDW),
régulateur de vitesse et d’interdistances(ACC)
• Les véhicules autonomes
• La tâche de conduite est déléguée à des automates embarqués.
L’intervention du conducteur peut être requise dans certaines
situations (d’urgence) dans un délais plus ou moins long.
• Besoin d’une définition plus rigoureuse qui fasse consensus
• Recommandation J3016 SAE
08/03/2019 AG INDURA Lyon www.ifsttar.fr 8
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux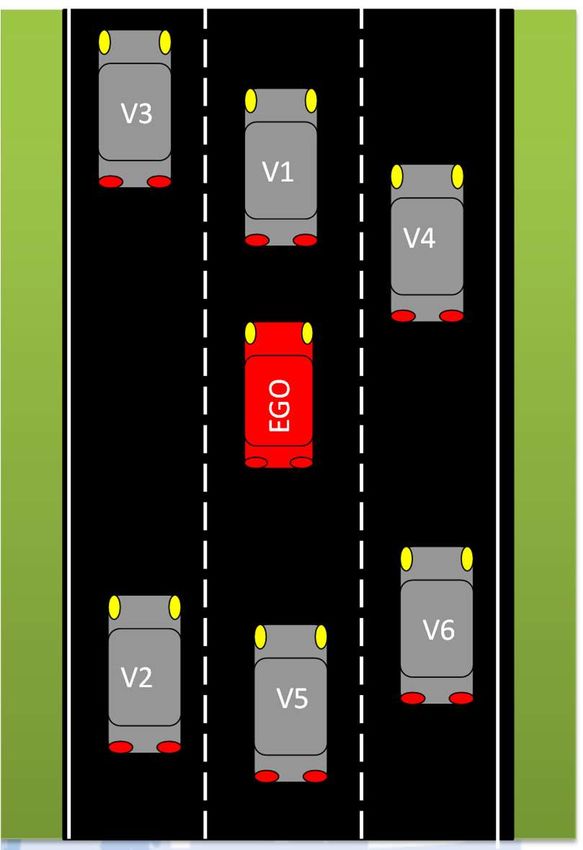
Volant, Surveillance
Modes Modes de
Niv. Définition Freins, environ-
dégradés conduite
Accélérateur nement
0 Pas d’automatisation Humain Humain Humain S.O.
Aides à la conduite : agit sur le
Humain et
1 volant OU l’accélérateur /frein Humain Humain Limités
système
dans certaines situations
Automatisation partielle : agit sur
2 le volant ET l’accélérateur /frein Système Humain Humain Limités
dans certaines situations
Automatisation conditionnelle : Le véhicule peut être
conduite automatique, mais le
amené à effectuer
3 conducteur doit être prêt à Système Système Humain Limités
reprendre le contrôle à tout une « manœuvre à
moment risque minimal »
Automatisation haut niveau :
idem ci-dessus même si le
4 Système Système Système Limités
conducteur n’est pas prêt à
reprendre le contrôle
Automatisation totale : idem ci-
5 dessus mais dans tous les modes Système Système Système Tous
08/03/2019 AG INDURA Lyon www.ifsttar.fr 9
et situations de conduite
Institut français des sciences et technologies des transports, de l’aménagement et des réseaux
08/03/2019 AG INDURA Lyon www.ifsttar.fr 10
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxAu final, un véhicule autonome c’est …
• Un véhicule capable d’assurer la tâche de conduite partiellement ou
totalement dans certaines situations ou dans toutes les situations
• Il gère de façon sûre les interactions avec son environnement :
autres véhicules et infrastructure
• Gestion des trajectoires conflictuelles, insertion dans le trafic
• Il respecte le code de la route
• Respect de la signalisation (limites de vitesse, stop , etc)
• Respect de priorités dans les zones de conflits (intersection)
• Autres règles : inter distance, dépassement etc.
• Il respecte l’environnement : eco-conduite
• Il est réputé fiable :
• Risques maîtrisés … : conception selon la norme ISO26262
• En cas de panne : repli vers des modes dégradés : « manœuvre
à risque minimal ».
08/03/2019 AG INDURA Lyon www.ifsttar.fr 11
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxLe véhicule : aspects
techniques
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxLes défis technologiques
• Connaître sa position (localisation)
• Sur le réseau routier: GPS, carte numérique précision métrique
• Dans la voie : caméra pour la détection des marquages précision
centimétrique (quid des marquages dégradés, absents, complexes)
• Percevoir les obstacles fixes ou mobiles proches (< 150m)
• Véhicules, vulnérables, objets sur la voie : caméra, radar, télémètre
laser à balayage
• Percevoir les obstacles fixes ou mobiles lointains (entre 150m et
1km) ainsi que les objets mobiles « cachés »)
• Communications véhicules-véhicules, infrastructure-véhicules
• Contrôler la trajectoire du véhicule
• En latéral : maintient dans la voie en ligne droite et virage
• En longitudinal : régulation/limitation de vitesse, contrôle des inter-
distances, prévention des collisions
• Dans toutes situations (virages, chaussée dégradée, neige, verglas) :
maintenir le véhicule dans son domaine de stabilité
08/03/2019 AG INDURA Lyon www.ifsttar.fr 13
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxJanvier 2018
Alors qu'il intervenait sur
un accident sur
l'autoroute, le camion 42
a été percuté par une
Tesla circulant à 65 mph
(105 km/h). Le
conducteur indique que
le véhicule était en
Autopilot.
Miraculeusement, il n'y a
pas eu de blessé.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 14
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxDRAME - En mai 2016
sur une autoroute de
Y a-t-il eu défaillance technique de la
Floride, un conducteur voiture ? Apparemment… oui et non. Oui,
était décédé au volant parce que l’on aimerait qu’un tel système
de sa Tesla Model S soit infaillible puisqu’on lui confie notre vie,
on peut donc considérer qu’il n’a pas bien
alors qu’il avait fonctionné. Mais, en réalité, à ce stade, on
enclenché l’Autopilot. s’aperçoit qu’il ne fait pas mieux qu’un
Son véhicule avait conducteur humain qui aurait pu, lui aussi,
être ébloui par le soleil. En plus, le
percuté un camion à système est encore en phase « bêta ».
près de 120 km/h. Plus Cela peut choquer car un logiciel de
d’un an plus tard, voiture n’est pas un programme de jeu.
Toutefois, Tesla rappelle qu’une mise en
l’enquête démontre que garde expliquant clairement les choses
la victime, malgré les s’affiche sur l’écran du véhicule.
alertes, n’a pas eu le
comportement adéquat
pour éviter le drame.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 15
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxUn véhicule qui a besoin de « voir » loin …
a besoin de communiquer
Perception étendue
Perception locale
110
08/03/2019 AG INDURA Lyon www.ifsttar.fr 16
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxMilieu extérieur
Architecture (exemple)
Collecte d’informations
Environnement Conducteur Etat véhicule Infrastructure
Trafic Localisation Cartes Autres véhicules Objectifs
Sécurité Mobilité Analyse Environnement Confort
Décision (planification de trajectoires)
Niveau Niveau Niveau
stratégique tactique Opérationnel
Action
Action sur direction, freins Information aux v. voisins
Information au conducteur
et accélérateur et aux gestionnaires d’infra
08/03/2019 AG INDURA Lyon www.ifsttar.fr 17
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxL’évolution nécessaire de
l’infrastructure
08/03/2019 www.ifsttar.fr 18
AG INDURA Lyon
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxVéhicules autonomes : comment se déplacer en toute
sécurité ? Un point de vue véhicule
• Pour se déplacer en toute sécurité, certaines fonctions clés doivent
être réalisées avec un haut nivau de fiabilité
• Contrôle de trajectoire fiable
• Anticipation des situations simples ou complexes
Fonctions clés (liste non exhaustive)
Lane keeping (maintient sur la voie)
Curve overshooting prevention (prévention sortie de route en courbe)
Distance headway control (contrôle des interdistances)
Collision avoidance or mitigation (prévention ou atténuation collisions)
Vitesse adaptée à la géométrie de la route, à son état de surface, aux
conditions météo et à la réglementation
Safe overtaking (dépassement en sécurité)
Safe crossroad and roundabout crossing (traversée sécurisée des
intersections et des ronds-points)
08/03/2019
Etc … AG INDURA Lyon 19
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxVéhicule autonomes : comment se déplacer en toute
sécurité ? Un point de vue infrastructure
• Au fur et à mesure que le niveau d’automatisation s’élève (3 à 5), la
dépendance à l’infrastructure augmente
• L’infrastructure doit fournir un niveau de qualité de service (QoS) de + en + élevé
Caractéristiques de Role/Impacte Variabilitié
l’infrastructure dans le temps
Lisibilité des Guidage latéral des véhicules, gestion des singularités Statique
marquages (intersections, rond-point, échangeurs),
Courbure et dévers Stabilité du véhicule, prévention des sorties de route en Statique
virage
Pente Prévention des collisions au cours d’un dépassement Statique
Adhérence Stabilité du véhicule en ligne droite et en virage Statique,
temporaire
Ornières, fissures, Stabilité du véhicule dans toutes les situations Temporaire
cassis etc
Visilité géométrique Prévention des collisions au cours d’un dépassement Statique
Lisibilité des feux Franchissement des intersections en toute sécurité Dynamique
tricolores (ou autres)
Lisibilité de la Respect de la réglementation Statique
signalisation Dynamique
Conditions
08/03/2019MTO Stabilité véhicule, vitesse,
AG INDURAinterdistance,
Lyon dépassement Dynamique
www.ifsttar.fr 20
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxInterdépendances entre véhicules et infrastructure
FONCTIONS CLES INFRASTRUCTURE
Marquage Géométrie Autres Adhérence Conditions Signali- Feux Etat de
au sol véhicules météo sation tricolores surface
Contrôle
lateral X X X X
Contrôle
FONCTIONS CLES VEHICULES
longitudinal X X X
Evitement des
collisions X X X
Contrôle de la
vitesse X X X X X X X
Contrôle des
interdistances X X X
Dépassement
sécurisé X X X X X X
Franchissement
Intersection X X X X X X
Contrôle de la
stabilité X X X
08/03/2019 AG INDURA Lyon www.ifsttar.fr 21
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxInfrastructure physique
et infrastructure numérique
• Infrastructure physique (« physical infrastructure »)
• C’est la route réelle …
• … avec sa géométrie, son adhérence, son état de
surface, son trafic, ses conditions météo etc
• L’infrastructure numérique (« digital infrastructure »)
• C’est la représentation numérique de l’infrastructure
physique …
• … une base de donnée embarquée dans les
véhicules : la LDM (Local Dynamic Map) …
• … mise à jour en continu (temps réel)
08/03/2019 AG INDURA Lyon www.ifsttar.fr 22
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxL’itinéraire sécurisé (HQoSH)
• Un itinéraire dont les caractéristiques sont quantifiées et comprises
dans des limites qui garantissent une circulation des véhicules
autonomes en toute sécurité
• Qui fournit aux véhicules des informations décrivant en temps réel son
état
• Représenté à bord des véhicules sous une forme numérique dans la LDM
Capteurs Capteur
route véhicules
Un véhicule
Unités autonome Autres
I2V V2V
bord de véhicules
COM COM (FCD)
route LDM
Infrastructure physique
HQoSH = High Quality of Service Highway
08/03/2019 AG INDURA Lyon www.ifsttar.fr 23
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxSe déplacer en sécurité : un scénario
• Un véhicule arrive à l’entrée d’un itinéraire sécurisé
Etape 1 (HQoSH).
• Il reçoit l’information décrivant le niveau de service
Etape 2 fournit par l’infrastructure sur l’itinéraire.
• Le véhicule décide alors du niveau d’automatisation
Etape 3 qu’il peut assurer et le propose au conducteur
• Le conducteur accepte ou rejette le niveau proposé
Etape 4 • Dans les étapes suivantes on suppose qu’il a accepté
08/03/2019 AG INDURA Lyon www.ifsttar.fr 24
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxSe déplacer en sécurité : un scénario
(suite)
• Dans des conditions normales, le mode d’automatisation
Etpae 5’ sélectionné est conservé jusqu’à la fin de l’itinéraire sécurisé.
• Dans des conditions anormales (ex: adhérence dégradée) le véhicule reçoit
le nouveau niveau de service fournit par l’infrastructure et évalue s’il est
Etape 5’’ compatible avec le niveau d’automatisation courant.
• S’il n’est pas compatible, le véhicule demande au conducteur de passer en
mode de conduite manuelle ou dans un mode d’automatisation inférieur
Etape 5’’’ compatible avec le niveau de service fournit
• Finalement, le véhicule atteint la fin de l’itinéraire sécurisé et
Etape 6 demande au conducteur de revenir à la conduite manuelle.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 25
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxConstructeurs-opérateurs : des attentes
réciproques
OEM et équipementiers Opérateurs routiers
• Les VA attendent de • Ont besoin d’une
l’infrastructure un niveau connaissance temps réel
de qualité de service de l’état de l’infrastructure
garantit pour maximiser pour une exploitation
leur sécurité optimale
• Les véhicules ont besoin • L’infra attend des
d’une connaissance véhicules traceurs des
précise de l’état de la informations en
route en complément de complément de celles
celles délivrées par leur délivrées par les
propres capteurs équipements de route et
(caméras, radars etc.) les véhicules patrouilleurs.
Une coopération gagnante-gagnante
08/03/2019 AG INDURA Lyon www.ifsttar.fr 26
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxCycle de circulation de l’information
Collecte
Mise à jour LDM d’informations
Véhicule
autonome
Transmission Transmission
Infrastructure
Mise à jour de Aggrégation
l’état infra
08/03/2019 AG INDURA Lyon www.ifsttar.fr 27
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxStratégie, cas d’usage et
feuilles de route
ERTRAC1 Strategic Research
Agenda
1ERTRAC = European Road Transport Research Advisory Council
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxUne stratégie sur 3 piliers
(2020-2030)
• Déploiement de véhicules automatisés en
traffic mixte
• Déploiement de poids lourds automatisés
en traffic mixte
• Déploiement de véhicules totalement
automatisés sans conducteur, pour une
usage urbain
08/03/2019 AG INDURA Lyon www.ifsttar.fr 29
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxCas d’usages:
véhicules automatisés en traffic mixte
• Automated Parking assistance
• Automated parking assistance (L2)
• Parking garage pilot (L4)
• Automated Valet Parking (L4)
• Highway Pilot
• Traffic Jam Assist (L2)
• Lane guiding/Changing assist (L2)
• Traffic Jam Chauffeur (L3)
• Highway Chauffeur (L3)
• Urban and suburban Pilot (L3)
• Highway Pilot (L4)
• Fully automated private vehicle (L5)
08/03/2019 AG INDURA Lyon www.ifsttar.fr 30
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxFeuille de route
08/03/2019 AG INDURA Lyon www.ifsttar.fr 31
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxCas d’usages :
poids lourds automatisés
• Platooning
• C-ACC platooning
• Automated truck platooning
• Highway Pilot
• Traffic Jam Assist (L2)
• Traffic Jam Chauffeur (L3)
• Highway Chauffeur (L3)
• Highway Pilot with ad-hoc platooning (L4)
• Highway Automated Trucks on public roads (L4)
• Autonomous freight vehicles (L5)
• Autonomous vehicles in confined areas (L5)
• Autonomous vehicles in dedicated lanes/roads/areas (L5)
• Autonomous hub to hub transport on public roads (L5)
08/03/2019 AG INDURA Lyon www.ifsttar.fr 32
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxFeuille de route
08/03/2019 AG INDURA Lyon www.ifsttar.fr 33
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxCas d’usages :
mobilité urbaine
• Solutions du « dernier kilomètre »
• Navettes « Cybercars » (L4)
• Gen 1 : vitesse < 40 km/h, infrastructure dédiée
• Gen 2 : zones spécifiques avec une infrastructure adaptée.
• Automated cyber solution (L5)
• Navettes totalement automatisées pouvant prendre des passagers
en tout lieux
• Bus automatisés (AB) or personal rapid transit (PRT)
• AB & PRT sur voies désignées, Gen 1 (L4) : 40 km/h max.
• AB & PRT sur voies dédiées, Gen 2 (L4)
• Circulation à la vitesse du flux, intégration dans un système de gestion du
trafic : interaction avec les feux, recommandations de vitesses, gestion de
priorités
• Bus automatisé (L4)
• En trafic mixte sur des routes désignées et des zones restreintes
08/03/2019 AG INDURA Lyon www.ifsttar.fr 34
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxFeuille de route
08/03/2019 AG INDURA Lyon www.ifsttar.fr 35
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxObstacles à surmonter
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxObstacles techniques (1/2)
• Besoin d’un haut niveau de fiabilité
• Fiabilité des capteurs/actionneurs, algorithmes, communications
• Résilience aux cyber attaques
• Niveau de fiabilité proche de l’aérien ou du ferroviaire mais au prix de
l’automobile
• Interaction avec les autres mobiles et les centres de gestion du trafic
• Véhicules non automatisés, non communicants, piétons, cyclistes
• Interopérabilité avec les autres véhicules automatisés et centres de
gestion du trafic (quel que soit le pays traversé)
• Adaptation aux instructions des centres de gestion du trafic (vitesses,
itinéraires etc)
• Test et validation
• A priori: la preuve d’algorithme devient de plus en plus difficile avec
l’introduction de l’IA (techniques deep learning)
• A posteriori : besoin d’une méthodologie fiable et d’autorisations pour
réaliser des tests sur route ouverte
08/03/2019 AG INDURA Lyon www.ifsttar.fr 37
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxObstacles non-techniques (2/2)
• Acceptabilité individuelle : quel est le niveau d’automatisation
attendu?
• Selon l’usage : conducteurs de véhicules personnels, de taxis, de
camion, de bus etc.
• Selon la catégorie d’usagers : jeunes, seniors, hommes, femmes, PMR
etc.
• Selon le contexte : urbain, route rurale, RN, autoroute,
• Acceptabilité collective
• Aspects réglementaires, responsabilités
• Compatibilité aux codes de la route nationaux
• Compatibilité à la convention de vienne
• Couts et modèles économiques
• Coût additionnel estimé entre 5000 et 10000 € : qui est prêt à payer ?
• Quel est le retour sur investissement des nouveaux services fondés sur
les véhicules communicants?
De nombreux projets français et européens
08/03/2019
ont pour objectifs d’explorer et surmonter ces obstacles
AG INDURA Lyon 38
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxConvention de Vienne
Version de 1968
Article 1
…
Le terme «conducteur» désigne toute
personne qui assume la direction d'un
véhicule, automobile ou autre (cycle
Révision : 23 mars 2016
compris), ou qui, sur une route, guide des
bestiaux, isolés ou en troupeaux, ou des Les systèmes de conduite
animaux de trait, de charge ou de selle automatisée seront explicitement
… autorisés sur les routes, à
Article 8 condition qu’ils soient conformes
1. Tout véhicule en mouvement ou tout aux règlements des Nations
ensemble de véhicules en mouvement doit unies [ONU] sur les véhicules,
avoir un conducteur, ou qu’ils puissent être contrôlés
3. Tout conducteur doit posséder les voire désactivés par le
qualités physiques et psychiques
conducteur »
nécessaires et être en état physique et
mental de conduire
5. Tout conducteur doit avoir le contrôle
total de son véhicule en ayant les deux
mains sur le volant.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 39
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxInitiatives en France et en
Europe
France initiatives
European FP7, FP8 (H2020)
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxNFI (Nouvelle France Industrielle)
• Launched in 2013 by the french Minister
of economy with the objective of
reindustrialising France
• Partial funding of national project (e.g.
SCORE@F, SCOOP@F two projects on
connected vehicles))
• Autonomous Vehicle part of NFI under
the direction of C. Ghosn (Renault,
Nissan CEO)
• Objective: write the development road map
of autonomous vehicles
• Contribute to the definition of call for project
• Linked for financing by ADEME (Energy
agency). First call 2018
https://www.pfa-auto.fr/wp-content/uploads/2016/03/Objectifs-de-recherche-Vehicule-
Autonome.pdf
08/03/2019 AG INDURA Lyon www.ifsttar.fr 41
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxVEDECOM
• French Institute for Public-Private Partnership
Research and Training dedicated to individual,
carbon-free and sustainable mobility.
• About 50 partners
• Funded partly by the government and partly by its
partners
• Three main research fields
• Vehicle electrification
• Shared mobility and energy
• Driving delegation and energy (incl. four topics)
• Self driving vehicle
• Robustness of achitectures and systems
• New secured communications and cooperative
safety
• Assessment of social impacts and acceptability of
delegated driving.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 42
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxRobomobile Life Prospective
Workshop
• Initiated by Ministry for an Ecological
and Solidary Transition
• Aims to analyse the impact of
driving automation
• On people lifestyle and territories
development
• On emergence of new economic sectors,
new jobs and possibly a new social order
with more or less inequalities
• Three main topics to be investigated
• Society and lifestyle evolution
• Changes in territories
• Transformation of mobility
08/03/2019 AG INDURA Lyon www.ifsttar.fr 43
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxPast and ongoing flagship projects (1/3)
• 7th Framework Program (FP7)
• Have-It (2008-2011, Budget: 27.6 M€)
• Highly automated driving for intelligent transport
• Focus on : driver awareness, optimized task repartition between the
driver and the system and misuse
• AdpatIVE (2014,2017, Budget: 24.1 M€)
• Driving functions for daily traffic by dynamically adapting the level of
automation to situation and driver status (from partially to fully
automated).
• Legal issues that might impact successful market introduction
• CityMobil 2 (2012-2016, Budget: 15.3 M€)
• Innovative automated transport modes and their demonstration in
the cities
• 5 demonstrators, 12 uses cases
• Three main barriers identified : the implementation framework, the
legal framework and the unknown wider economic effect.
08/03/2019 AG INDURA Lyon www.ifsttar.fr 44
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxPast and ongoing flagship projects (2/3)
• H2020 : 8th Framework Program (FP7)
• SCOOT (2016-2018)
• Identify pathways for an accelerated proliferation of safe and connected
high-degree automated driving in Europe,
• L3-PILOT (2017-2021, budget: 46.7 M€)
• Test the viability of automated driving functions of Level 3.
• Based on FESTA test methodology
• 11 countries, 100 vehicles, 1000 drivers.
• Autodrive (2017-2020, Budget: 65.1 M€)
• Advancing fail-aware, fail-safe, and fail-operational electronic components,
systems, and architectures for fully automated driving
• CARTRE (2016-2018, Budget: 3 M€)
• Support action which aims accelerating development and deployment of
automated road transport
• Include a joint stakeholder’s to coordinated automated road transport
approaches
08/03/2019 AG INDURA Lyon www.ifsttar.fr 45
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxPast and ongoing flagship projects (3/3)
• H2020 : 8th Framework Program (FP7)
• AUTOPILOT (2017-2019, Budget: 26.6 M€)
• AUTOPILOT brings IoT (Internet of Things) into the automotive world to
transform connected vehicles into highly and fully automated vehicle.
• Thanks to AUTOPILOT, the IoT eco-system will involve vehicles, road
infrastructure and surrounding objects in the IoT, with a particular attention to
safety critical aspects of automated driving.
• AutoMate (2016-2019)
• Develop, demonstrate and evaluate the TeamMate Car concept as a major
enabler of highly automated vehicles.
• TeamMate concept : Driver and automation are seen as members of one
team that understand and support each other in pursuing cooperatively the
goal of driving safely, efficiently and comfortably from one point to another.
• Etc … much more other projects can be found on this link
• https://connectedautomateddriving.eu/research/
08/03/2019 AG INDURA Lyon www.ifsttar.fr 46
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxMerci pour votre attention
Plus d’informations …
jacques.ehrlich@ifsttar.fr
contact@djet.fr
www.ifsttar.fr
Institut français des sciences et technologies des transports, de l’aménagement et des réseauxVous pouvez aussi lire