Android pour l'industrie - Pierre Ficheux () Octobre 2013
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Android pour l’industrie
Pierre Ficheux (pierre.ficheux@openwide.fr)
Octobre 2013
Android pour l’industrie 1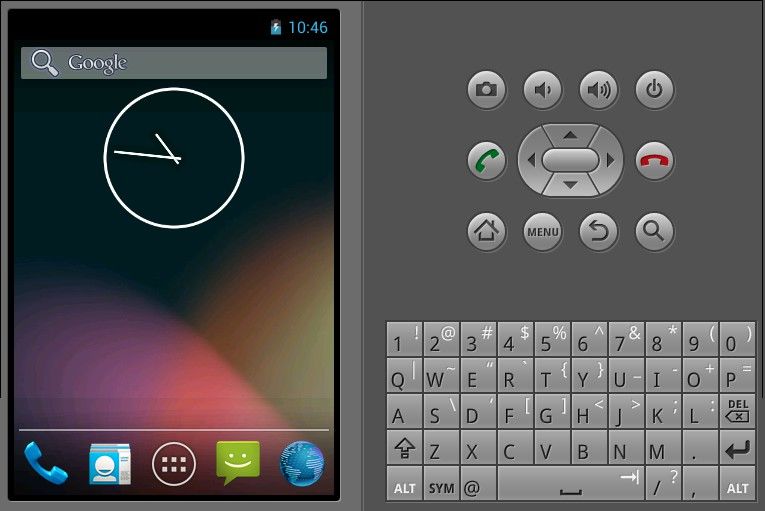
Ecosystème
● Environ 1,5 M d'activations par jour, plus d’un milliard
de téléphones depuis l’été 2013 !
● 1M d'applications sur Google Play (Android market)
● 75 % du marché des smartphones (17% pour iOS)
● Répartition des versions :
Android pour l’industrie 2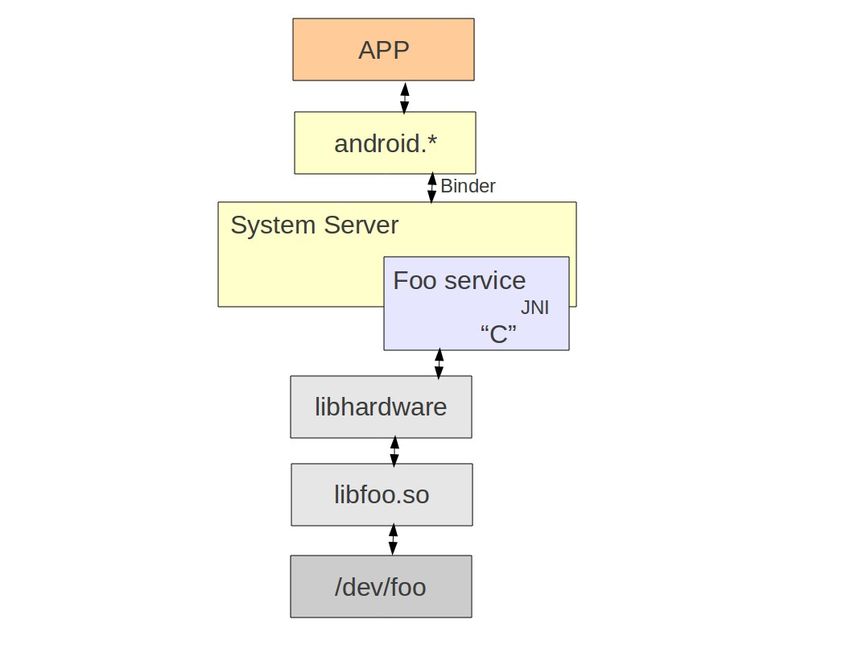
Android et l'industrie ?
● Android est conçu pour la téléphonie + tablettes
● Les projets industriels abandonnent les RTOS
propriétaires pour Linux (embarqué)
● Le développement sous Linux (embarqué) est
complexe
– Souvent C/C++ (Qt)
– Outils hétérogènes
● Android nécessite (souvent) une adaptation pour
l’utilisation industrielle
● Typologie des projets
– Avec ou sans temps réel « dur »
– Avec ou sans interfaces graphique (headless)
● Android n’est pas une solution universelle !
Android pour l’industrie 3
Android, open source project ?
● Le monde de la téléphonie est peu enclin à utiliser du
logiciel libre
● Les sources d'Android sont disponibles via AOSP →
adaptation possible ou BSP constructeur :)
● En pratique, Android ne suit pas les règles de
fonctionnement des projets libres
– Développements réalisés « behind de doors »
– Nombreux projets « non officiels », comme Android-
x86
– Nombreux développements spécifiques (et
propriétaires) réalisés par/pour les constructeurs
– Si possible, Google évite les composants sous GPL
→ ré-écriture + licence Apache 2
● Départ à l’été 2013 du leader du projet (JBQ) !!
Android pour l’industrie 4
Licences
● Android est constitué de nombreux composants
– Noyau Linux (GPL)
– Composants Google (Apache 2)
– Composants externes (user space) souvent GPL
– Propriétaires (pilotes binaires)
● Les applications de Google Play (Android Market) sont
pour la plupart propriétaires (idem AppStore) → non
disponibles dans les sources d’Android
Android pour l’industrie 5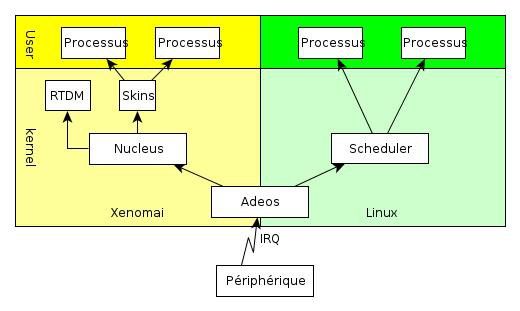
La licence GPL en bref
● La GPL a pour origine le projet GNU de la Free
Software Foundation (Richard M. Stallman)
● GPL = General Public License
● Intègre la notion de « copyleft » (vs « copyright »)
● La GPL v2 (1991) est la plus répandue (exemple :
noyau Linux)
● Principes :
1. La licence s'applique uniquement en cas de
redistribution
2. Un code source utilisant du code GPL est du travail
dérivé et doit être publié (i.e. celui qui reçoit la
version binaire peut obtenir le code source)
3. Pas de lien (ld) possible entre du code GPL et du
code « propriétaire » !
Android pour l’industrie 6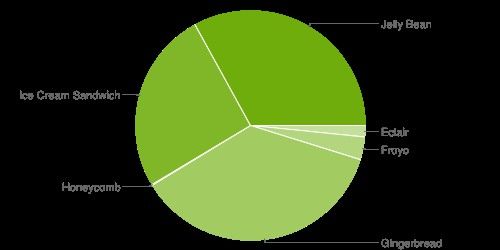
Licence Apache 2
● Fournie par ASF en 2004
● Proche des licences BSD et MIT
● Principale différence avec la GPL/LGPL : pas de
« copyleft » (dérivation) → pas de publication du code
● Pour plus d'information voir :
– http://source.android.com/source/licenses.html
– http://www.apache.org/licenses/LICENSE-2.0.html
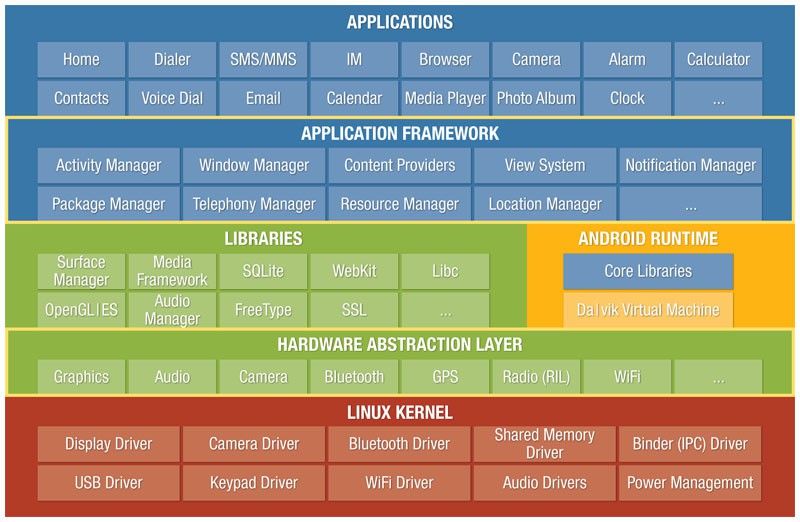
Android pour l’industrie 7Architecture générale (Google) Android pour l’industrie 8
Le noyau Linux (rouge)
● Assure l'interface matérielle
● Différent du noyau standard nommé « mainline » et
disponible sur http://www.kernel.org
– Nouveau système d'IPC (Inter Process Comm.)
– Gestion d'énergie améliorée
– Système trace (logs)
● Initialement (et toujours) un « fork » du noyau
● Pilotes retirées du noyau officiel en 2009
● De retour sur drivers/staging/android depuis le
3.3
● Convergence (partielle) avec le mainline en cours
● Google est contributeur par nécessité, choix
pragmatique
● Noyau binaire fourni par défaut dans AOSP
Android pour l’industrie 9Bibliothèques + HAL (vert)
● Bibliothèques spécifiquesGoogle ou externes
● Spécifiques :
– Bionic, libC « allégée » sous licence BSD,
partiellement POSIX → difficulté de portage de
code « legacy »
– Surface Manager, Audio Manager, ...
● Externes (sources fournies par Google dans AOSP) :
– Webkit
– OpenSSL
– …
● Hardware abstraction layer → accès aux pilotes noyau
– Graphique, audio, Wi-Fi, ...
– Pas d'accès direct au noyau (différent de
GNU/Linux)
Android pour l’industrie 10HAL
● Pour chaque « service » on a
– Un System service (Java)
– Une définition dans la HAL (interface matérielle) +
pilote noyau
● Le constructeur doit fournir une bibliothèque (.so)
externe à AOSP (sous licence propriétaire) → à ajouter
au répertoire /device
● Le pilote noyau – également fourni par le constructeur -
reste sous GPL
● Voir un exemple sur
http://www.opersys.com/blog/extending-android-hal
Android pour l’industrie 11Architecture HAL
Répertoires AOSP
/frameworks/base/core/
/frameworks/base/services/java/
AOSP-provided
ASL
/frameworks/base/services/jni/
/hardware/libhardware/
/device/[MANUF.]/[DEVICE]
/sdk/emulator/
Manuf.-provided
Manuf. license
Noyau ou module
Manuf.-provided
GPL-license
Schéma K. Yaghmour
Android pour l’industrie 12Android runtime (jaune)
● Dalvik, LA JVM de Google
– Grosse valeur ajoutée au niveau performances
– Syntaxe Java
– Optimisée pour l'embarqué
– Non compatible avec JDK Oracle, utilise des
fichier .dex
– .dex produit à partir du .class par dex →
encombrement divisé par 2
● Les « core libraries » venant du projet Apache Harmony
remplacent les « JDK libs » pour le runtime
● Contient également des scripts et binaires nécessaires au
démarrage (ramdisk initial) dont Zygote qui démarre Dalvik
Android pour l’industrie 13Android framework (bleu)
● Correspond à l'API fournie aux développeurs pour
écrire les applications
● Majoritairement écrit en Java
● Utilisation de JNI pour l'accès aux couches basses
(C/C++) depuis une application
● La communication utilise Binder, une couche IPC
écrite par Google en remplacement des IPC
UNIX/POSIX
Android pour l’industrie 14Architecture générale (K. Yaghmour)
Schéma K. Yaghmour
Android pour l’industrie 15AOSP, introduction
● AOSP = Android Open Source Project
● Accessible sur http://source.android.com
● Sources pour les plate formes de référence
– Émulateur goldfish
– Nexus 4, 7, 10
– Pandaboard (carte ARM)
– Certains Galaxy Nexus
→ http://source.android.com/source/building-devices.html
● Bonne documentation
● AOSP utilise aussi des composants propriétaires
(exemple : pilotes graphiques)
https://developers.google.com/android/nexus/drivers
● Les sources représentent plusieurs centaines de
dépôts Git (1 par projet) et plus de 16 Go !
Android pour l’industrie 16AOSP, pré-requis
● Nombreux pré-requis pour la compilation AOSP (rien à
voir avec Linux embarqué)
● Machine (puissante) 64 bits sous Linux ou Mac OS X
(pas de Windows !)
● 4 Go de RAM, 100 Go de disque
● SMP conseillé
● Distribution Ubuntu 10.04 LTS ou éventuellement 12.04
● Quelques paquets à installer
● Utilisation de VM déconseillée (mais fonctionne)
● Java 6 → JDK 6.1
● Largement basé sur GNU Make
● La procédure d'initialisation est décrite sur :
http://source.android.com/source/initializing.html
Android pour l’industrie 17AOSP « in a nutshell »
● Google fournit l'outil repo (un script Python) afin de
gérer les nombreux dépôts Git
● Cet outil utilise un fichier manifest pour indexer les
dépôts
$ mkdir work && cd work
$ repo init -u https://android.googlesource.com/platform/manifest
[-b ] sélection de la branche, exemple android-4.3_r2
$ repo sync [-j N] synchronisation avec le dépôt, N jobs
● Sélection de la cible, compilation et test
$ source build/envsetup.sh chargement des variables
$ lunch aosp_arm-eng cible émulateur (goldfish) + mise au point (eng)
$ make -j N
$ emulator [-show-kernel -shell] &
Android pour l’industrie 18Les cibles AOSP
● Différentes cibles dans le menu lunch (4.3)
Lunch menu... pick a combo:
1. aosp_arm-eng Goldfish
2. aosp_x86-eng x86
3. aosp_mips-eng
4. vbox_x86-eng
5. aosp_deb-userdebug
6. aosp_flo-userdebug
7. ...
12. full_mako-userdebug Nexus 4
13. full_maguro-userdebug
14. full_manta-userdebug
15. full_arndale-userdebug
16. full_toroplus-userdebug
17. full_toro-userdebug
18. full_panda-userdebug Pandaboard
● Différents type de build
– user (production)
– userdebug (production + accès root + debug)
– eng (développement)
Android pour l’industrie 19Écran de l'émulateur
● Déverrouiller l'écran en « tirant » le cadenas vers
l'extérieur
Android pour l’industrie 20Remarques sur AOSP
● Les sources occupent environ 16 Go (pour JB) car
Google fournit l'intégralité, y compris les composants
externes
● Grosse différence avec GNU/Linux (Buildroot, OE, …)
qui obtiennent les paquets à partir des dépôts et
appliquent des « patch »
● Le système de construction est rudimentaire, rien à voir
avec GNU/Linux !
● Après compilation, le répertoire occupe 40 Go
● Les binaires sont produits sur le répertoire out et
indexés sur le nom de la cible
$ ls -1 out/target/product
generic cible émulateur (goldfish)
panda
Android pour l’industrie 21Noyau Linux/Android
● Le noyau Linux n'est pas conçu au départ pour la
téléphonie
– Gestion d'énergie :-(
– Mise en veille
– IPC System V → « old style »
– Gestion de mémoire / processus (context switch)
● Modifications par Google
– Wakelocks
– Binder
– Klogger
– Ashmem
– Alarm timers
– Low memory killer
Android pour l’industrie 22Noyau Linux/Android, suite.
● Les pilotes Android sont dans drivers/staging → pas
intégrés au mainline
● Retirés en décembre 2009, ré-intégrés dans la version
3.3
● Effort de convergence sur les versions récentes
● Bonne compatibilité de l’API noyau Linux (modules)
● Rappel : un module noyau ne suffit pas à piloter un
périphérique sous Android (HAL)
Android pour l’industrie 23SDK
● La plupart des développements Android se font en
Java
– Langage « simple », très répandu
– Très bonne performances de Dalvik
● Google fournit un SDK basé sur Eclipse → ADT
(Android Developer Tools)
– Simple à utiliser pour les développeurs Java/Win$
(mais pas forcément pour les autres)
– Approche « Visual Machin » → New Project, Next,
Next, … , Finish
● Test de l'application directement sur émulateur
● Création d'un fichier .apk installable sur n'importe
quelle cible Android
Android pour l’industrie 24Diagramme de création Android pour l’industrie 25
NDK
● Les développements C/C++ sont fait avec le NDK (pour
Native Development Kit)
– Portage de code existant, proche de POSIX
– Possibilité de développer uniquement avec NDK
(mais pas conseillé par Google)
– Plus souvent, interfaçage avec SDK par JNI (Java
Native Interface)
● Android utilise des fichiers Makefile dédiés et assez
basiques → Android.mk
● Pas de support officiel Autotools/CMake
● Le NDK contient principalement les chaînes croisées
dans toolchains et les bibliothèques (Bionic, …) dans
platforms
Android pour l’industrie 26NDK et POSIX
● La plupart des RTOS ont une API POSIX (VxWorks,
RTEMS, QNX, ...)
● Android n'est pas totalement un système POSIX car la
libC (Bionic) est simplifiée par rapport à GNU-libC
● Souvent nécessaire d'importer du code (POSIX)
existant (propriétaire ou libre) dans Android
– Porter le code en Java ?
– Utiliser NDK (plus simple en général)
● Le cas le plus fréquent est l'utilisation d'une
bibliothèque C/C++ depuis une application Java (ex :
accès pilote noyau JNI)
● Exemples fournis dans le NDK
Android pour l’industrie 27Bionic
● La libC Bionic est volontairement beaucoup plus légère
que la Glibc
The core idea behind Bionic's design is: KEEP IT
REALLY SIMPLE.
● Pas de support IPC System V (Android utilise Binder) !
● Quelques limites dans le support PThread
● Pas de support des exceptions C++
● Pas de compatibilité binaire avec la Glibc
● Support ARM et x86 uniquement
● Nécessite l'utilisation du compilateur Android (NDK)
● Voir android-ndk-rX/docs/system/libc
Android pour l’industrie 28Utilisation d’une chaîne externe ?
● Le NDK a des limitations au niveau POSIX
● Le noyau Android est un noyau Linux donc les appels
systèmes standards sont disponibles
● Une solution est d'utiliser une chaîne croisée
« standard » (exemples : CodeSourcery, ELDK, …) →
installer les bibliothèques sur la cible (en plus de
Bionic)
● Problème : intégration dans SDK
Android pour l’industrie 29Android et le temps réel
● Android n’est pas conçu au départ pour les applications
TR
● L’API POSIX est cependant disponible dans le noyau
Linux
● L’application de « patch » TR n’est pas triviale car ces
patchs sont prévus pour un noyau « mainline »
● Tests réalisés sur des tâches périodiques avec
PREEMPT-RT et Xenomai sous Android-x86 →
résultats identiques à ceux de GNU/Linux
● Test directement en mode « console »
● Voir la démonstration :)
Android pour l’industrie 30PREEMPT-RT
● Branche expérimentale pour la version 2.6 et 3.x, voir
https://rt.wiki.kernel.org
● Initié par Ingo Molnar, contributeur majeur du noyau
● Aucun lien avec « preempt-kernel » !
● Surtout utilisé sur x86 et des processeurs performants
(nécessite TSC = Time Stamp Counter)
● Fonctionne également sur ARM (9 ou plus), Nios II,
Microblaze, ...
● Nécessite un noyau « mainline » (ou proche) mais ne
sera probablement jamais intégré à la branche officielle
● Mise en place très simple (application d'un patch)
● Mêmes API de programmation que Linux standard
Android pour l’industrie 31PREEMPT-RT, suite
● Threaded interrupt model → utilisation d'un thread
noyau (donc interruptible) pour le traitement de chaque
interruption
4 2 root SW< 0 0% 0% [sirq-high/0]
5 2 root SW< 0 0% 0% [sirq-timer/0]
...
6 2 root SW< 0 0% 0% [sirq-net-tx/0]
● Prévention des inversions de priorité (par héritage)
● Timers noyau haute précision (API hrtimer)
● Réécriture complète des mécanismes de
synchronisation (spinlock → mutex)
● Le résultat est un noyau (presque) « préemptif », mais
reste un noyau Linux
● Sections critiques avec des tâches non TR
Android pour l’industrie 32Linux avec co-noyau
● Utilisation d’un noyau temps dans l’espace mémoire du
noyau Linux
● Séparation entre le composant temps-réel et Linux
– Ordonnanceur temps-réel spécifique
– Pas de dépendance sur les sections critiques Linux
● Virtualisation de la gestion d'interruptions Linux
– Routage prioritaire des IRQs vers le co-noyau
● Linux comme tâche idle du co-noyau
● Se rapproche de la technique de « para-virtualisation »
des hyperviseurs (adaptation de l'OS)
● Extensions RTLinux, RTAI, Xenomai
Android pour l’industrie 33Xenomai, architecture
● Xenomai utilise un micro-noyau (ADEOS) pour partager
le matériel avec le noyau Linux
pilote TR
API TR
noyau TR
noyau Linux
micro-noyau
Android pour l’industrie 34Domaines Xenomai
Code applicatif VxWorks Code applicatif POSIX
Xenomai Xenomai
glibc glibc
libvxworks libpthread
Appels système
Pile réseau Xenomai RTOS
VFS/FS ... Noyau
Adeos I-Pipe
Hardware
Android pour l’industrie 35Android industriel,
avantages/inconvénients
● Avantages
– Programmation Java (simple et répandue)
– IHM évoluée
– Communauté importante
– Fait rêver les managers et les comptables (tablette =
grand public = bon marché)
● Inconvénients
– Incompatibilité POSIX
– Système de « build » AOSP rudimentaire par rapport
à GNU/Linux
– Pas réellement un projet libre ni communautaire
– Noyau Linux non standard (même si la situation
évolue)
– Interfaces matérielles spéciales mal supportées !!
Android pour l’industrie 36Conclusions
● Utiliser Android quand :
– Le projet nécessite une IHM
– Le projet ne nécessite pas de TR dur (pour l’instant)
– L’utilisation de Java est un avantage
● Attention à la dépendance / Google → quelle part
d’AOSP disponible et jusqu’à quand ?
● Android ne peut remplacer GNU/Linux embarqué
– Développement communautaire
– Support matériel
– Système de construction bien plus avancé (Yocto)
Android pour l’industrie 37Questions ? Android pour l’industrie 38
Vous pouvez aussi lire