Dossier de Mi- projet - Compétition Robots marcheurs 2017 - Fonteniaud.fr
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Dossier de Mi- projet
Compétition Robots marcheurs 2017
Responsable projet tutoré robot
marcheur 2016-2017 :
Monsieur FONTENIAUD
Sommaire
I. Présentation de l'équipe ..................................................................................................... 1
II. Présentation du projet ........................................................................................................ 1
1. Objectif ............................................................................................................................ 1
2. Compétition ..................................................................................................................... 2
III. Identification du besoin .................................................................................................. 2
1. Analyse du besoin fondamentale .................................................................................... 2
2. Analyse fonctionnelle ...................................................................................................... 3
3. Recherche de l’existant ................................................................................................... 5
IV. Faisabilité et solutions techniques retenues................................................................. 12
V. Financement ..................................................................................................................... 14
1. Faisabilité économique ................................................................................................. 14
2. Budget prévisionnel....................................................................................................... 15
3. Recherche de sponsors ................................................................................................. 15
VI. Conception .................................................................................................................... 15
1. CAO ................................................................................................................................ 16
2. Maquette ....................................................................................................................... 18
VII. Planning ......................................................................................................................... 19
1. Planning prévisionnel du projet .................................................................................... 19
2. Taches réalisées par chaque membre de l’équipe ........................................................ 21
VIII. Communication ............................................................................................................. 22
1. Logo et slogan :.............................................................................................................. 22
2. Communication avec les sponsors : .............................................................................. 23
3. Présentation du projet et publicité faite aux sponsors :............................................... 24
Conclusion : .............................................................................................................................. 24
Présentation de l'équipe
Nous sommes 4 étudiants de 2ème année de DUT Génie Mécanique et Productique, âgés de
19 à 23 ans et originaires de la région Auvergne-Rhône-Alpes :
Sur la photo de gauche à droite :
o Kévin DUBESSET : Chargé de communication
o Aurélien FOURETS : Chef de projet
o Yohann LANGLAIS : Chef d’atelier
o Benoit MAUGEIX : Chef dessinateur
Présentation du projet
1. Objectif
L'objectif est de concevoir et de fabriquer un char tracté ou poussé par un robot marcheur
mécanique et de participer à des courses, sur un anneau de vitesse, face à des concurrents.
Nous avons le droit, pour simple propulsion, uniquement à un moteur d’essuie-glace de
voiture fonctionnant sous 12V.
L’alimentation de ce moteur se fera par une seule batterie de 12 V.
Nous sommes face à des contraintes de conception et de réalisation telles que le poids, le
coût, l’aspect visuel, la direction du robot, la position du char etc …
Le but final est de présenter lors de la compétition, un robot respectant le cahier des charges
et de remporter le prix du meilleur Robot Marcheur.
1
2. Compétition
Organisée par l'IUT de Grenoble, elle se tiendra le Jeudi 23 Mars 2017 au Halle Chartreuse à
Gières et verra la confrontation de nombreux départements GMP issus de toute la France.
A ce jour, 35 équipes sont en lice.
Elle sera divisée en trois sous compétitions :
1er compétition : La course des robots
Le but est de remporter un maximum de courses de vitesse contre nos adversaires, en
respectant les règles.
2ème compétition : Le meilleur stand
Il s’agit d’une compétition de communication. Nous devrons tenir un stand constitué d’une
table simple et d’un espace mural que nous devrons, décorer et animer pendant toute la
compétition.
3ème compétition : Conception et réalisation
Un jury analysera l’innovation de la conception et la qualité technique de la réalisation pour
déterminer le robot « coup de cœur » de cette nouvelle édition.
Les trois compétitions sont récompensées séparément avant de désigner le grand vainqueur
du challenge inter-GMP; qui sera l’équipe qui aura engrangé le plus de points sur les trois
compétitions.
Identification du besoin
Avant de se lancer tête baissé dans la conception de notre robot nous nous sommes
concentrés sur l’identification du besoin. C’est-à-dire trouver quel est notre besoin, trouver
les contraintes qui s’appliquent à notre système et enfin la recherche de l’existant. Pour cela
nous avons découpés cette partie en trois sous-parties, l’analyse du besoin fondamentale,
l’analyse fonctionnelle et l’analyse du marché et des produits existants.
1. Analyse du besoin fondamental
Pour réaliser cette analyse nous avons utilisés la méthode APTE (Application aux techniques
d’entreprises) qui nous permet d’obtenir une expression claire du besoin que doit remplir
notre robot.
Ci-dessous le diagramme « bête à corne », qui constitue la réponse à notre besoin.
2
A qui rend-il service ? Sur quoi agit-il ?
A l’équipe
La course
Aux sponsors
ROBOT
MARCHEUR
Faire un tour de piste et larguer un
char à mi-parcours le plus rapidement
possible
Dans quel but ?
2. Analyse fonctionnelle
Nous avons ensuite réalisé l’analyse fonctionnelle, cette étape nous permet de définir les
fonctions principales ainsi que les fonctions de contraintes auxquelles devra répondre notre
robot.
Pour cela, nous avons fait l’inventaire de tout ce qui influe sur notre robot et son
environnement.
Ci-dessous le diagramme « pieuvre » reprenant toutes les fonctions principales et de
contraintes.
3
Départ Maintenance
Stand Conception et
réalisation
Piste
FC1 FC14
Temps
Télécommande FC2 FC13 Arrivé
radio 2.4 GHz
FP1
FC3
Coût
FC4 Robot FC12
Participants
FC11
FC5
Jury FC10
FC6
Moteur- Batterie
FC7 FC8 FC9
Poids
Sol
Utilisateur
Char Temps 4
Participants
FP1 : Parcourir une distance du départ jusqu’à l’arrivée.
FC1 : Avoir son propre stand.
FC2 : Le robot a une piste spécifique à parcourir.
FC3 : Le robot est dirigé avec une télécommande radio de technologie 2.4 GHz.
FC4 : Le coût est de 150 euros maximum.
FC5 : Attribution des notes par un jury.
FC6 : Le poids autorisé pour le robot est de 22 kg maximum.
FC7 : Les robots sont dirigés par des équipes de maximum 6 personnes.
FC8 : Le robot a pour obligation de lâché un char dans une zone définie pendant la course.
FC9 : Le robot doit mettre le moins de temps possible. Toute pénalité a pour ajouts d’un certain
nombre de secondes rajouté au score final.
FC10 : Le robot parcours sa course sur de la moquette.
FC11 : Le robot a pour obligation de fonctionner avec un moteur d’essuie-glace est une batterie
12V.
FC12 : Le robot sera en concurrence avec celui d’autres équipes (31 pour le moment).
FC13 : Le robot doit avoir une conception simple et une réalisation de bonne qualité.
FC14 : Le robot doit avoir une maintenance aisée.
3. Recherche de l’existant
Après avoir défini nos besoins et fait l’inventaire de nos fonctions principales et de nos fonctions
de contraintes, nous avons réalisé la recherche de l’existant, c’est-à-dire rechercher pour
chaque fonction (avancer, tourner, etc…) les solutions techniques existantes.
Ci-après les tableaux pour chaque fonction avec plusieurs solutions techniques existantes.
5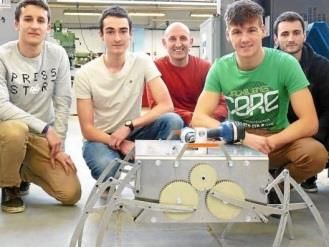
Avancer :
Type Avantages Inconvénients Description Image
Robot avec des pattes
Pattes latérales + - Mouvements complexes
uniquement sur les cotés
moteur d’essuie- Peu utilisé - Peu stable
(comme une fourmie par
glace - Virages peu aisés
exemple).
Robot avec des pattes
Pattes avant et
- Virages peu aisés postérieures et antérieures à
arrière + moteur Mouvement simple
- peu stable ou lents l’image d’un animal
d’essuie-glace
quadrupède.
- mouvement simple
Pattes (avant ou
- stable Robot avec des pattes
arrière) et roues +
- rapide - Très utilisés antérieures ou postérieures
moteur d’essuie-
- beaucoup de méthodes avec des roues de l’autre côté.
glace
pour tourner
6
Tourner :
Type Avantages Inconvénients Description Image
Roues - Angle de virage
directrices maîtrisé Système consistant à faire
- Très utilisé
+ - Virages aisés tourner directement les roues
Servomoteur - Système simple
Pattes avec - Peu utilisé - Système compliqué et
Système permettant de ralentir
différentiel (+ - Maîtrise de couteux
une patte et d’en faire accélérer
roues folles) + l’angle du - Désynchronisation des
un autre.
servomoteur virage pattes
- Très peu utilisé - Pourrait ne pas
Système Système se basant sur la
- Maîtrise de marcher
skateboard déformation d’éléments liés par
l’angle du - Peut avoir un angle de
+ moteur des bagues en caoutchouc.
virage rotation limité
- Pas de maîtrise de
Système du l’angle de virage
Système simple à Système se basant sur le système
planté de bâton - Si la force est trop
mettre en œuvre de virage d’une luge.
(ou compas) importante, peut
retourner le robot
7
Larguer :
Type - Avantages - Inconvénients Description Image
- Original - Peut laisser des débris
- Inatendu - Peut dégrader la piste Consumer un mince fil de fer en le
Fusible
- Simple a mettre - Non réutilisable soumettant à du courant.
en oeuvre - Incertain
- Rapide Il suffit de faire passer le courant
- Efficace - Solution de facilité dans l’aimant pour tenir la
Electro-aimant
- Peu chère remorque et de le couper pour la
- Réutilisable lâcher.
- Purement
- Nécessite un système
mécanique Utlilisation d’une oince pour palan
Palan + plus complexe pour la
- Facile à mécanique qui se serre tant
servomoteur mise en œuvre.
fabriquer qu’elle est soumise à un effort.
- Peut être lent
- réutilisable
- Système simple
Système permettant de libérer la
d’utilisation
Canadair + remorque à l’aide de trappes tout
- Peut être usiné - Peut être lent
servomoteur comme un canadaire largue sa
- Réutilisable
cargaison.
8Larguer (suite) :
Type Avantages Inconvénients Description Image
- Excellente maîtrise du
Une vis est mise en rotation
- Peu chère timing
Boulon + vis avec moteur avec l’allumage du moteur et
- Système simple - Lent
se dévisse au fil du temps.
Un anneau (lié à la
remorque) est tenu par un
Anneau + doigt + - Système simple, efficace et
- Solution de facilité. doigt (lié au robot). Quand
servomoteur préfabriqué
ce dernier est ouvert, le
robot largue la remorque.
9Tracter :
Type Avantages Inconvénients Description Image
- Peut-être plus
- Pas d’avantage difficile pour
Pousser - Le robot pousse le char.
notable controler la
direction.
- Pas d’avantage - Pas d’avantage
Tirer - Le robot tire le char.
notable notable
10Transmettre :
Type Avantages Inconvénients Description Image
Une chaîne tendue entre 2
- Solution assez courante - Si elle n’est pas assez pignons transmet
Chaîne Ne nécessitant pas un grand tendue, la chaîne risque de indirectement la vitesse de
travail de conception. dérailler. rotation du moteur vers les
pattes.
Une courroie tendue entre 2
- Solution assez courante - Si elle n’est pas assez pignons transmet
Courroie - Ne nécessitant pas un grand tendue, la courroie risque indirectement la vitesse de
travail de conception. de glisser. rotation du moteur vers les
pattes.
- Un train d’engrenages
- Transmission fiable et Un train d’engrenages
nécessite un travail
permettant de maîtriser le transmet directement la
Engrenages préparatoire important. De
rapport de réduction et par vitesse de rotation du moteur
plus, le rendement est
conséquent, le couple. vers les pattes.
difficile à maîtriser.
11Faisabilité et solutions techniques retenues
Nous allons choisir dans cette partie quelles solutions techniques utiliser pour chaque fonction et en
parallèle mener une étude au niveau de la faisabilité technique.
Tracter :
Type Avantages Inconvénients Description Image
Pas
Pas d’avantage Le robot tire le
Tirer d’avantage
notable char.
notable
Nous avons choisi tout d’abord de tirer notre char afin que celui-ci ne gêne par lors du largage. Car si
le char est poussé par le robot il faudra le contourner après l’avoir largué (cela occasionnera une
perte de temps).
Larguer :
Type Avantages Inconvénients Description Image
Un anneau (lié
à la remorque)
est tenu par un
-système doigt (lié au
Anneau + doigt - solution de
simple, efficace robot). Quand
+ servomoteur facilité.
et préfabriqué ce dernier est
ouvert, le robot
largue la
remorque.
Pour larguer le char, nous nous sommes mis en accord sur l’anneau + doigt + servomoteur car il nous
faut une liaison rigide entre le robot et le char afin de mettre en place notre direction (voir dans la
fonction tourner). De plus ce système de largage est simple au niveau de sa conception, car il ne
requiert qu’un servomoteur et le mécanisme anneau + doigt (préfabriqué). Ce système nous offre
donc de meilleures chances de réussite.
12Tourner :
Type Avantages Inconvénients Description Image
- Angle de
Roues Système
virage
directrices consistant à
maîtrisé
+ Très utilisé faire tourner
- Virages aisés
Servomote directement
- Système
ur les roues
simple
Pour réaliser la fonction « tourner , nous allons installer des roues directrices sur le char avec un
servomoteur, donc la rotation du robot ne pourra s’effectuer que lorsque le char est attaché au
robot. Nous mettrons en place une liaison filaire qui se détache lors du largage entre le servomoteur
sur le char et le récepteur. C’est une solution de facilité que nous avons choisi dans un premier temps
mais si notre groupe trouve une solution plus original et qui fonctionne celle-ci pourra être
remplacée. De plus cette solution est risquée du fait qu’après le largage le char, le robot est
incontrôlable au niveau de la direction.
Avancer :
Type Avantages Inconvénients Description Image
Robot avec des
Pattes - Mouvements
pattes uniquement
latérales + complexes
sur les cotés
moteur Peu utilisé - Peu stable
(comme une
d’essuie- - Virages peu
fourmi par
glace aisés
exemple).
Pattes - Mouvement
(avant ou simple Robot avec des
arrière) et - Stable pattes anterieures
roues + - Rapide Très utilisés OU posterieures
moteur - Beaucoup de avec des roues de
d’essuie- méthodes l’autre côté.
glace pour tourner
Pour avancer, nous avons choisi de faire un mélange des deux solutions proposées ci-dessus. C’est-à-
dire des pattes arrières, en position latérale, couplées avec deux roues folles à l’avant du robot. Cela
nous permet de libérer l’arrière du robot afin d’avoir une liaison avec le char plus aisée. De plus,
cette solution est très peu utilisée, ce qui nous apporte une certaine originalité au niveau de la
conception.
13Transmettre :
Type Avantages Inconvénients Description Image
Chaîne Solution assez Si elle n’est pas assez Une chaîne tendue
courante ne tendue, la chaîne entre 2 pignons
nécessitant pas un risque de dérailler. transmet
grand travail de indirectement la
conception. vitesse de rotation
du moteur vers les
pattes.
Pour transmettre l’effort de rotation nous allons utiliser une chaine avec deux pignons. La chaine
présente l’avantage d’être régler facilement (en enlevant ou en rajoutant des maillons), de plus la
chaine ne peut pas glisser comme une courroie.
Financement
1. Faisabilité économique
Plusieurs éléments sont à prendre en compte pour la faisabilité technique du projet. Nous
devons choisir des matériaux, des composants pour réaliser des solutions techniques, adaptées
au financement dont nous disposons.
Sachant que les matériaux de bases et visserie sont relativement bon marché, et que l’usinage
n’est pas pris en compte dans la faisabilité économique (usinage offert par l’IUT), cela nous laisse
une plus grande marge en terme de composants de type servomoteurs, etc…, éléments parmi les
plus onéreux du projet.
142. Budget prévisionnel
Détail des besoins Détail des coûts
Moteur + batterie Moteur essuie-glace + batterie 100€
Servomoteurs +
Kit robotique radiocommande + roues + 150€
coussinet/roulement
Matière première + visserie A définir 150€
Aménagement du stand + tenu Affiche + t-shirts 150€
Coût total 550€
Le budget reste assez simple et imprécis au stade actuel. L’avancement du projet permettra de
compléter et préciser celui-ci.
Pour débuter notre projet nous avons besoin d’un budget de 200€.
3. Recherche de sponsors
Pour financer notre projet nous devons trouver des sponsors afin d’avoir des dons pécuniaires
ou matériels.
Afin d’avoir une meilleure compréhension de notre projet par nos partenaires, nous avons
rédigés un dossier de sponsoring (dossier joint à celui-ci).
A ce jour, nous avons eu une participation financière de 300€ de la part du Rotarys Club de
Montluçon-Néris Les Bains, ainsi que le don d’un moteur d’essuie-glace (d’une valeur de 30€)
de la part d’ISACR Etablissement Gabillat.
Conception
Après la validation de nos solutions techniques nous avons commencés la partie conception du
projet. Celle-ci s’est déroulée dans un premier temps sur papier pour faire quelques ébauches,
puis très vite en CAO avec CATIA V5.
151. CAO
Nous avons commencé la CAO par la création d’une patte, afin d’étudier sa cinématique et
de dimensionner le châssis du robot par la suite.
Nous avons choisi le modèle de patte Y car sa cinématique est assez simple et original, elle
est très peu présente dans les concours robot marcheur précèdent.
Ci-dessous la représentation de la patte et son mouvement.
Position basse Position intermédiaire montante
Position haute Position intermédiaire descendante
Après avoir modélisé les pattes, nous avons modélisé le moteur d’essuie-glace en supprimant
les parties inutiles. Sera joint avec le dossier le CATIA du moteur.
Ci-dessous quelques images du moteur.
16Par la suite nous avons conçu un système pour tenir notre moteur sur le bâti du robot (il
bloque les rotations et les translations) et rajouté une poignée de transport (comme indiqué
dans le cahier des charges).
Support batterie
Poignée
Support Moteur
Toutes les liaisons sont montées sur roulement ou coussinet, dans les pattes, dans les roues.
17De plus nous n’avons pas pu dimensionner le pignon, il n’aura donc pas des caractéristiques idéales
pour le moment.
2. Maquette
Pour vérifier que la cinématique de la patte fonctionne bien réellement nous l’avons
reproduite avec du carton.
Ci-dessous la maquette de la patte dans son mouvement.
Position basse Position intermédiaire montante
Position haute Position intermédiaire descendante
Nous pouvons constaté que notre cinématique fonctionne très bien et sans aucune gêne.
18Planning
1. Planning prévisionnel du projet
19Pour mener à bien ce projet nous avons créé un planning prévisionnel. Ce planning reprend toutes les taches qui constituent notre projet sur la totalité de
sa durée.
A ce jour, aucun retard n’est détecté par rapport à notre planning prévisionnel, mise à part la durée d’obtention des fonds pour financer notre projet.
Toutefois il est important de noter que la durée de la réalisation CATIA a été surestimée.
202. Taches réalisées par chaque membre de l’équipe
Kévin :
TACHES
Liste Sponsors potentiels
Démarchage Sponsors sur terrain
Ouverture du site internet
Rédaction Dossier de sponsoring
Création d'une boite mail pour l'équipe
Facebook de l'équipe
Suivis photographique
Article ENT IUT
MAJ Site Internet
MAJ dossier Sponsoring (équipe, budget...)
Aide dossier mi-projet
Aurélien :
TACHES
Planning prévisionnel
Aide dossier sponsoring
Analyse du besoin fondamental
Logo / slogan
Faisabilité économique et budget prévisionnel
Dossier de mi-projet
Aide à la conception du robot
Démarchage sponsors sur terrain
Benoit :
TACHES
Recherche de l'existant
Faisabilité Techniques
Recherche de sponsors
Solutions Techniques
Démarchage sponsors sur terrain
conception robot
21Yohann :
TACHES
avancé du site
trouver une solution finale
recherche de solutions
démarchage sponsors sur terrain
diagramme pieuvre
conception CAO
assemblage CAO
Communication
La partie communication du projet consiste en la recherche d’un logo et d’un slogan pour
illustrer notre projet, la recherche de soutiens financiers et matériels, la présentation de
notre projet et son avancement pour fédérer autour de lui, ainsi que faire de la publicité pour
nos soutiens.
1. Logo et slogan
Pour le nom de l’équipe et son slogan, notre première inspiration a été la région de notre
IUT.
Nous avons choisis l’image des Volcans d’Auvergne pour illustré le logo de l’équipe, car il
symbolise la région que nous représentons, et la puissance et les énergies de la Terre qui ont
anciennement façonnées la région.
Logo de l’équipe :
Les pattes symbolisent la marche que devra effectuer notre robot, ainsi que sa progression
en tant que projet.
Notre slogan « Pourquoi tirer une remorque quand on peut déplacer des montagnes » est tiré
de notre logo.
222. Communication avec les sponsors
Dans un premier temps, la partie communication du projet consiste surtout en la recherche
de soutiens financiers ou matériels (le sponsoring), ainsi que la création d’un logo et d’un
slogan.
Partie qui sera remplacé au fur et à mesure de l’avancement du projet pour laisser place à
une communication d’avantage accès autour du robot et de la publicité faite pour les
sponsors.
La première étape à consister à établir une liste des établissements, privés ou publiques,
comportant nom, adresse, contact et informations pertinentes les concernant. Le but est de
pouvoir prendre connaissance des possibilités de sponsoring offerte sur le secteur de
Montluçon, et ainsi nous l’espérions, cibler beaucoup plus efficacement notre recherche de
sponsoring.
Comme dis dans la partie « Financement », nous avons rédigé un dossier de sponsoring afin
de pouvoir présenter de façon plus professionnel et approfondis notre projet lors de notre
démarchage.
Nous avons cependant constaté que ce ciblage n’était pas efficace, et avons en conséquence
changé de stratégie. Désormais, nous ciblons d’avantages les clubs services et les ERP
(Etablissements Recevant du Publique).
Les Clubs Service car ce sont une manne potentiels de financement, de contact et de
conseils, qui ont la volonté d’apporter leur aide à des projets, telle que le nôtre.
Les ERP car ce sont des lieux brassant du public et pouvant rechercher à attirer du monde,
par l’intermédiaire d’une publicité que nous pouvons leur offrir.
233. Présentation du projet et publicité faite aux sponsors
En parallèle de cette communication de terrain, nous nous sommes également établi sur le
web.
Nous avons créé :
- un site internet : Pour présenter la compétition, notre robot, notre avancement à travers
des Posts ;
- une page Facebook : primordiale pour être suivis très facilement étant donnée le succès
de la plateforme au sein de la population étudiante ;
- une page YouTube : Pour accueillir tout ce qui est vidéos.
Nous avons également rédigé un article pour l’ENT de l’IUT d’Allier, qui sera visible à la
connexion des étudiant de l’IUT à leur Environnement Numérique de Travail. Cet article
reprend une présentation du projet et de la compétition, de l’équipe, ainsi que nos soutiens.
Ces différents supports seront utilisés et approvisionnés en fonction des besoins et de notre
avancement.
Enfin, une partie communication est prévue au niveau des sponsors sur support physique
également :
- Des affiches lors de tenu du stand pendant la compétition, ou lors de l’organisation
d’évènements avant la compétition ;
- Des T-shirts avec nom et logo de l’équipe ainsi que ceux des sponsors.
Conclusion
A ce jour, nous avons fini l’avant-projet, c’est-à-dire l’analyse du besoin, l’analyse
fonctionnelle, les solutions techniques ainsi que la conception. De plus nous avons réalisé le
robot en CAO mais aussi les pattes en maquette carton.
Nous avons rencontré quelques difficultés dû à la complexité du cahier des charges, au
niveau des solutions techniques (comme avec la direction du robot). Mais également
d’autres sont apparues au niveau de la conception, la recherche de sponsors et pour évaluer
le budget nécessaire au projet.
D’un point de vue du financement, nous avons eu un bon début avec le don de deux
partenaires, l’un financier et l’autre matériel. Ceci n’est toujours pas suffisant pour financer
l’intégralité du projet c’est pourquoi la recherche de sponsor doit continuer.
Nous pensons passer les commandes de matériaux et composants nécessaire à la fabrication
de notre robot dans les semaines à venir. D’ici là nous allons également débuter l’avant-
projet de fabrication qui nous conduira à l’usinage.
24Vous pouvez aussi lire