PROJET RobAFIS : Dossier de conception d'un robot en Lego Mindstorms
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
PROJET RobAFIS :
Dossier de conception d’un robot en Lego
Mindstorms
Projet réalisé dans le cadre du cours de master mécatronique de M. Bonjour
Dernière date de modification : 15/11/09
Réalisé par : Benoit CHAUVIN, Pierre GAUDION, Romain TREVISAN et Sergio DE CASTRO
Projet encadré par Mme DULMET Maryvonne
École Nationale Supérieure de Mécanique et des Microtechniques
ENSMM – 26, chemin de l’épitaphe – 25030 BESANÇON Cedex - France
Tél. : +33 (0)3 81 40 27 31 - Fax : +33 (0)3 81 80 98 70 - www.ens2m.fr
Sommaire
1. REFERENRIEL DES EXIGENCES (LOT 10)…………………………………….1
2. DOSSIER D’ETUDES (LOT 20)…………………………………………………..3
2.1. DESCRIPTION DETAILLEE (LOT 21)……………...………………………3
2.2. SPECIFICATIONS TECHNIQUES (LOT 22)……………………………….6
2.3. ARCHITECTURE FONCTIONNELLE DETAILLEE (LOT 23)…………..11
2.4. ARCHITECTURE ORGANIQUE DETAILLEE (LOT 24)…………………15
3. DOSSIER DE DEFINITION (LOT 30)……………………………………………17
3.1. NOMENCLATURE DE DEFINITION……………………………………….17
3.2. SCHEMA D’INTERCONNEXION ELECTRIQUE…………………………17
3.3. SCHEMA DE DESCRIPTION DE LA CHAINE CINEMATIQUE………..18
3.4. PLANS D’ENSEMBLE DU ROBOT………………………………………..19
3.5. SPECIFICATION DE CONTROLE FINAL…………………………………19
4. DOSSIER JUSTIFICATIF DE DEFINITION (LOT 40)………………………….20
5. PLAN D’INTEGRATION VERIFICATION VALIDATION QUALIFICATION
(LOT 50)……………………………………………………………………………..21
6. DOSSIER D’ETUDE DE MAINTENABILITE ET DE DEFINITION DE LA
MAINTENANCE (LOT 60)………………………………………………………...23
6.1. DOSSIER D’ETUDES DE MAINTENABILITE (LOT 61)…………………23
6.2. PLAN DE MAINTENABILITE ET FICHES DE MAINTENANCES (LOT
62)……………………………………………………………………………...25
6.3. VALIDATION DU PLAN DE MAINTENANCE (LOT 63)…………………28
7. PLAN DE MANAGEMENT (LOT 70)…………………………………………….29
7.1. GESTION ET SUIVI DE PROJET (LOT 71)………………………………29
7.2. PILOTAGE PAR QUALITE, COUTS, DELAIS (LOT 72)………………...33
7.3. PLAN DE MANAGEMENT DES RISQUES (LOT 73)……………………35
7.4. SUIVI DES COUTS PRODUIT AU COURS DU DEVELOPPEMENT
(LOT 74)………………………………………………………………………36
7.5. COUTS UNITAIRE DU ROBOT……………………………………………37
ANNEXES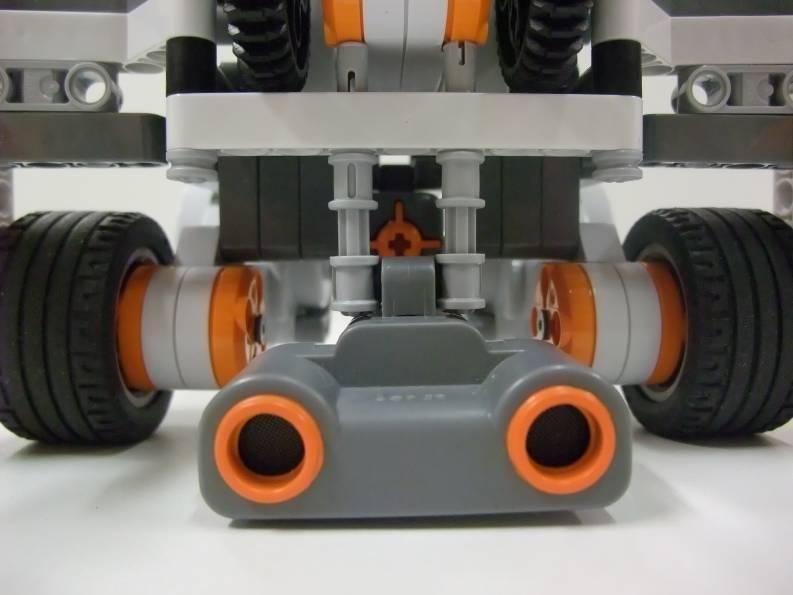
1. Référentiel des Exigences (LOT 10)
Dans l’optique d’une approche « Ingénierie Système », nous avons structuré notre approche afin de
passer du besoin initial à la solution. Dans un premier temps, notre action s’est portée sur l’analyse
du besoin à travers le règlement fourni par le comité d’organisation du concours RobAFIS. Le but
premier étant d’obtenir un référentiel des exigences clair et concis :
Phases Classification Exigences initiales Exigences système Type Actions
Au signal de départ donné par le juge, le
Réalisation à l'aide
robot est mis en Activation manuelle Fonctionnelle
d'une interface
marche par un membre de l’équipe,
Le robot doit alors localiser et atteindre le Localisation du fardeau disposé à un endroit Programmation d'une
Fonctionnelle
fardeau disposé sur la zone d’intervention, aléatoire séquence "exploration"
en un point non défini préalablement. Déplacement jusqu'au fardeau Fonctionnelle avec deux objectifs : la
localisation et la
Récupération du fardeau Fonctionnelle
préhension
Programmation d'une
Le robot doit saisir et transporter le fardeau
Transport du fardeau Fonctionnelle séquence "retour" avec
et venir le déposer dans la zone de
deux objectifs :
récupération prévue à cet effet.
atteindre le bac de
Exigences Dépose du fardeau dans la zone de
Fonctionnelle dépose et y déposer le
liées à la récupération fardeau
mission
Orienté de façon à partir en marche avant Partir en marche avant Fonctionnelle
Le robot doit alors s’immobiliser à Désactivation du robot proche de la zone de
Fonctionnelle Programmer l'arrêt du
proximité de la zone de récupération. récupération
programme à la fin de
L’arrêt du robot doit se faire de façon
Désactivation automatique Fonctionnelle la mission
autonome.
Programmer une
Pas de parcours imposé pour aller du point
Création d'une méthode d'exploration sans séquence "exploration"
de départ au fardeau et pour venir à la zone Performance
D contrainte concernant le parcours à réaliser : -> créer une méthode
de récupération.
E efficace
V Prévoir les pannes et
La mission est réalisée sans intervention d’un Réalisation de la mission totalement
E Contrainte les bugs possibles afin
opérateur. autonome
L de les enrayer
O Le robot utilise uniquement des composants
P du kit LEGO Mindstorms NXT fourni par
P l’AFIS Conception à l'aide des composants du kit
Contrainte
E Il ne sera admis, ni ajout, ni modification uniquement
M d’un quelconque constituant du kit, pour la
E réalisation du robot
N Se familiariser avec les
T Le robot sera piloté à partir de l'outil de
Programmation à l'aide du logiciel fourni ou Contrainte méthodes de
programmation fourni dans le kit principal
JAVA Performance programmation et faire
ou d'une programmation JAVA
un choix
Exigences
Prévoir des
liées au Solution permettant d'effectuer des tests Contrainte
programmes de tests
robot
Réfléchir à une
Le robot doit être testable et maintenable.
conception permettant
Solution maintenable Contrainte
une maintenabilité
simple
Pour la conception,
Les dimensions maximales projetées du Au repos, les dimensions du robot ne doivent
Contrainte penser à la
robot lorsqu’il se trouve au repos pas excéder un carré de 40cm de côté configuration du robot
n'excéderont pas un carré de 40 cm de côté
à la fois au niveau de
et une hauteur de 40 cm. Elles pourront être En fonctionnement, les dimensions peuvent
Performance son volume et à la
augmentées en fonctionnement. augmentées symétrie
La surface de la zone d’intervention est Capable de se mouvoir sur une zone plane et
Contrainte
parfaitement plane et horizontale. horizontale
Exigences Capable de réaliser la mission sous un
La zone d’intervention est éclairée de façon Faire des tests avec les
liées à éclairement quasi uniforme pouvant parfois
quasi régulière, excepté les zones d’ombres Contrainte différents capteurs mis
l'environnem apporter des zones d'ombres suivant l'état du
produites parle fardeau et le robot. en jeux
ent d'emploi robot et du fardeau
Température ambiante évoluant dans une Résistance aux conditions limites de
Contrainte
plage de 15 à 32 °C. températures
1
Pression atmosphérique comprise entre Résistance aux conditions limites de pression
Contrainte
1000 et 1030 mb. atmosphérique
Résistance aux conditions limites
Hygrométrie comprise entre 40 et 75 %. Contrainte
d'hygrométrie,
La zone délimitée d’évolution simulée est un Capable d'évoluer sur un sol rectangulaire
Contrainte
sol rigide et dur de 1,50 m x 2,50 m de dur de 1,50 m x 2,50 m
couleur claire Capable d'évoluer sur un sol de couleur claire
Contrainte
uniforme. uniforme
Capable d'évoluer sur une zone délimitée par
Cette surface est délimitée par une bande Contrainte Possibilité d’utiliser
une bande noire
noire satiné-brillant collée en bordure de ses cette bande afin de ne
En cas de nécessité d'interagir avec les
4 côtés, à pas sortir de la zone ->
bandes délimitées; le permettre avec une
l’intérieur de la zone. La largeur de la bande Auxiliaire tester le (les) capteur(s)
largeur de bande de 50 mm et de
est de 50 mm. en question
caractéristique satiné-brillant
Capable d'évoluer avec un sol possédant une
La zone de stockage initial du robot est une
zone de stockage de couleur noire de 50 cm x Contrainte
surface de couleur noire de 50 cm par 50 cm.
50 cm
Autour et en dehors de la zone d’évolution
pourront se trouver des obstacles non
Réalisation de la mission avec la possibilité
définis et éventuellement mobiles, dans tous Contrainte
d'obstacles à 2 m de la zone d'évolution
les cas, ils ne seront pas à moins de 2 m des
limites de la zone.
Tester le (les)
Accommodation à la géométrie du support Contrainte capteur(s) permettant
Le support de fardeau similaire à une bague
la localisation de
cylindrique est de couleur noire. Accommodation à la couleur noire du
Contrainte l'ensemble "fardeau +
support support"
Le fardeau ne présente
Apte à saisir le fardeau sur un support non
pas de risque de glissement sur le sol, ni de Auxiliaire
soumis au glissement et au basculement
basculement.
Apte à interagir avec une zone de
Contrainte
La zone de récupération est constituée d’un récupération de couleur rouge
bac de couleur rouge, de diamètre 200 mm Prendre en compte la
et de 40 mm de Apte à interagir avec une zone de
géométrie du bac de
hauteur, l’épaisseur du rebord étant récupération de diamètre 200 mm, de 40 mm
Contrainte récupération en
comprise entre 1 et 2 mm. de hauteur et d'épaisseur du rebord de
fonction de la dépose
maximum 2 mm
du fardeau
Le jour de la compétition, avant l’évaluation
opérationnelle, chaque équipe aura accès à
Apporter programmes,
la zone
Possibilité de modifications en moins de 30 ordinateur avec
d’évaluation pendant environ 30 min, pour Performance
min le jour de la compétition logiciels et pièces légo
réaliser librement des essais de mise au
lors de la compétition.
point et de
vérification fonctionnelle in situ.
La durée maximale pour effectuer la mission Capable d'effectuer une mission en moins de
Contrainte
est de 5 minutes. 5 min
Répondre
La compétition a pour double objectif Obtention des objectifs minimum pour la techniquement aux
C d’évaluer les performances du robot en réalisation de la mission en situation Contrainte caractéristiques
O situation opérationnelleet en confrontation opérationnelle demandées par le
M avec des adversaires. La confrontation client
P consiste à tester la rapidité d’exécution de la Donner des objectifs
E Obtention de performances optimales pour
Exigences mission et la complétude de lacouverture Performance d'un niveau supérieur
T la confrontation avec des adversaires
liées au fonctionnelle atteintes par chaque équipe, aux exigences clients
I comparativement aux robots proposés comme la réalisation
déploiement Réalisation de la mission plus rapidement
T parchacune des autres équipes. Performance d'une mission en moins
I que l'adversaire
de 3 min.
O
Le robot devra être dimensionné pour être Nécessité de réaliser au moins 6 missions Faire des tests de
N Contrainte
capable de réaliser au moins 6 missions successives répétabilité
successives sur une Apte à fonctionner durant une durée de 4 Faire des tests
durée de 4 heures. Contrainte
heures d'autonomie
Concevoir le robot par
les équipes disposent de 5 minutes pour Nécessité d'une facilité de maintenance blocs où chacun d'entre
Contrainte
remettre éventuellement en état leur robot (accessibilité) eux devront être
accessible facilement
Dans certains cas d’incidents, l’opérateur Avoir un ordinateur
aura la possibilité d’agir sur une commande Possibilité d'intervenir sur le robot, d'un portable allumé avec le
permettant de contrôler le fonctionnement point vu commande logiciel durant une phase Auxiliaire logiciel de
du logiciel de commande, pour permettre le de jeux de la compétition programmation déjà
redémarrage du robot. lancé
2
Le temps nécessaire à une intervention ne
sera pas décompté du temps total nécessaire Nécessité d'avoir des interventions rapides Contrainte
pour réaliser la mission.
Le robot ne pourra pas être contrôlé ou
Evolution du robot totalement autonome
piloté à distance pendant les épreuves Contrainte
sans aucune intervention commande
opérationnelles.
Le robot doit pouvoir être assemblé et mis Conception permettant une mise en Apprendre à monter le
en configuration opérationnelle en moins de configuration opérationnelle en moins de 15 Contrainte robot et se
15 minutes. min chronométrer
Exigence liée
RECYCL Le kit Lego Mindstorm sera rendu à la fin de Possibilité de rendre l'intégralité du kit Lego à
à l'après Contrainte
AGE la compétition la fin de la compétition
compétition
Après analyse du cahier des charges et de la description du référentiel du concours, nous avons donc
obtenu le référentiel des exigences exprimé ci-dessus. Il va donc nous permettre de faire le lien entre
les demandes clients (comité organisateur du concours RobAFIS) et les différents groupes de
développeurs. Ainsi, c’est à la suite d’un brainstorming que les exigences initiales ont donné
naissance aux exigences système (point de vue développeur) ponctuées pour certaines d’entre elles
par les démarches techniques qui pourront suivre lors du développement du robot.
2. Dossier d’Etudes (LOT 20)
2.1. Description détaillée (LOT 21)
La mission que doit remplir le robot consiste à explorer une zone d’intervention délimitée. Il doit
ensuite localiser et récupérer un fardeau disposé sur un pilier et ensuite le déposer dans une zone de
récupération connue. Pour finir, le robot doit se stopper de lui-même ce qui marque l’arrêt de la
mission. Le temps total entre la mise en marche et l’arrêt complet du robot après qu’il ait rempli sa
mission doit être inférieure à 5min.
Voici plusieurs photos du robot que nous avons conçu :
Vue de face : Vue de dos :
Côté droit : Côté gauche :
3
On peut décomposer notre robot en 5 modules principaux :
2.1.1. Module de déplacement
La fonction déplacement est assurée par les 2 moteurs avant en liaison direct avec les roues et un
appui ponctuel à l’arrière du robot.
Les 2 moteurs avant permettent d’avancer, reculer et tourner aisément. Les deux
moteurs sont suffisamment espacés pour permettre un meilleur maintient et une
plus grande précision sur l’angle de rotation du robot. A l’arrière nous avons choisi de
mettre un appui ponctuel :
Cela permet ainsi à notre système d’être stable, économique et facilement manœuvrable. En effet
cette liaison nécessite très peu de pièces (contrairement à notre première idée qui était d’utiliser une
roue libre). Mais cette liaison convient très bien car elles diminuent toute résistance pendant
l’avancement ou la rotation du robot.
2.1.2. Module détecteur d’objets
Cette fonction est assuré par 2 capteurs : le capteur ultrason et le capteur de contact fixés à l’avant
du robot :
4
Le capteur ultrason est utilisé pour une première détection assez générale. Il balaie une large partie
du terrain. Mais d’après les tests effectué, nous avons remarqué que la précision du capteur ultrason
a faible distance était plutôt mauvaise (voir test lot …). Nous avons donc décidé d’utiliser le capteur
ultrason surtout pour se placer suivant le bon angle. Et une fois le fardeau bien repéré, le robot doit
avancer doucement jusqu’au fardeau et le capteur de contact permet ensuite de s’arrêter lorsque le
robot est contact avec le pilier pour pouvoir ensuite refermer les pinces et attraper le fardeau.
2.1.3. Module détecteur de lignes
On utilise pour cela 2 capteurs que l’on place sur les cotés du robot : le capteur de couleur et le
capteur de lumière fixés sur les côtés du robot :
Ces deux capteurs doivent donc être capables de voir lorsque le robot traverse les limites de la zone
indiquée par du scotch noir. Le fait de placer les capteurs sur les deux cotés permet de s’assurer que
le robot ne pourra sortir du terrain.
2.1.4. Module préhension
On a décidé de réaliser cette fonction avec une pince horizontale qui permet de prendre et relâcher
aisément le fardeau :
Cette solution présente l’avantage de ne pas empêcher la vision du
capteur tout en permettant une prise correct du fardeau. En effet nous
avions d’abord pensé à utiliser une pince verticale de ce type :
5
Mais cette solution présentait le désavantage de bloquer la vision ultrason quand la pince était en
position basse et surtout comme le pilier et la zone de récupération ont la même hauteur, il était
difficile de faire en sorte que la pince puisse prendre le fardeau sans le faire tomber ou le relâcher a
la même hauteur… De plus ce type de pince ne peut attraper le fardeau que s’il est bien en face du
fardeau, alors que notre solution permet de balayer une large zone. La pince n’attrape pas seulement
devant elle. Cette solution permet ainsi de compenser le problème du capteur ultrason qui ne
permettra peut être pas de s’aligner exactement en face du pilier.
2.1.5. Module traitement de données et transmission d’énergie
Cette fonction est évidemment traitée par l’ensemble NXT+ batterie + logiciel+câbles :
Un synoptique de montage a été réalisé et est fourni en annexe
2.2. Spécifications Techniques (LOT 22)
2.2.1. Limite en fourniture
Ce que l’on fourni :
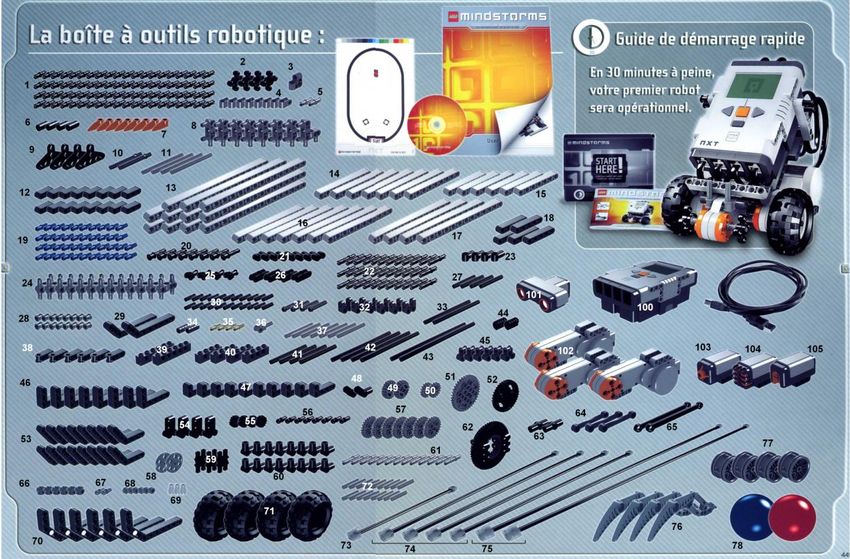
Dans le cadre du concours, notre robot se compose uniquement des pièces inclues dans le kit Lego
Mindstorms ainsi que d’un jeu de pile de type AA/LR6 - 1,5 V nécessaires au fonctionnement du NXT.
Nous y avons également ajouté le programme en JAVA que nous avons créé.
Ce que l’on ne fourni pas :
Par ailleurs, lors du concours RobAFIS, nous ne fournissons pas le fardeau ni son support. Nous ne
fournissons pas non plus la table de jeu ni son bac de récupération du fardeau.
2.2.2. Caractéristiques fonctionnelles du robot
Conditions d’utilisation et
Fonction Caractéristiques
règles
Lorsqu’il n’est pas en
Le robot doit pouvoir être
Le robot a un maintient et un fonctionnement, le robot peut
contenu dans un cube de
volume correct être soulevé en étant tenu au
40cm*40cm*40cm
niveau du moteur de pince
Le robot doit se mettre en
Le robot démarre la mission marche après appui sur le Temps de réaction inférieur à 2s
bouton de mise en marche
Le robot fait un quart de tour
Le robot sort de la zone de Le robot est placé au centre de la
gauche, avance de 40cm, quart
stockage initiale de 50cm*50cm zone de stockage initiale
de tour droite et avance de 60cm
6
La zone d’évolution simulée est Le robot a une vitesse de 20cm/s
un sol rigide et dur de 1,50m x +/- 1cm/s.
2,50m de couleur claire Il ne doit pas mordre sur le
Le robot explore la zone uniforme. Cette surface est bande noires de plus 20mm +/-
d’évolution délimitée par une bande noire 5mm.
collée en bordure de ses 4 côtés. Sur sol claire : luminosité > 55.
La largeur de la bande Sur bande noire :
est de 50mm. luminosité < 45.
Le robot repère le support de Le pilier doit avoir un diamètre
Le capteur ultrason indique une
fardeau et se centre en face de de 20mm pour une hauteur de
distance entre 20cm et 60cm.
celui-ci et avance pas à pas. 40mm.
Le robot vient en contact avec le
Le pilier doit être fixé sur le sol Vitesse = 10cm/s +/- 1cm/s
pilier
Le robot se stoppe lorsque le Fardeau d’un poids inferieur à Capteur de contact stimulé
contact est établi puis il saisi le 50mm pour un diamètre de Vitesse de fermeture des pinces
fardeau 50mm. = 1tr/s.
Vitesse = 20cm/s +/-3s.
Le robot rejoint une ligne noire Avancer en ligne droite jusqu'à
en transportant le fardeau ce que le capteur de lumière
indique un chiffre inferieur à 45
Capteur de lumière : luminosité
Le robot suit la ligne noire
Bac de récupération : 200mm de
Module préhension :
Vitesse de rotation des pinces 1 tour/s +/- 0.1tour/s
Course angulaire de chaque pince 35° +/- 2°
Hauteur des pinces par rapport au sol 5cm +/- 0.5cm
Largeur de la zone où les pinces peuvent
8cm +/- 0,5cm
attraper le fardeau sur le pilier
Module détecteur de ligne :
Capteur luminosité Distance < 5cm
Capteur couleur Distance < 5cm
Module détecteur d’objets :
Angle capteur ultrason +/- 30°
Distance capteur ultrason 20cm2.2.5. Description détaillée de la stratégie d’exploitation
n=5
n =6
n =7
n=4
n =8
n=3
n=0 n =1
n =2
Zone non balayée lors de
l’exploration
Après son démarrage par un appuie sur ENTER, le robot commence à explorer la table selon une
trajectoire bien définie.
Les points n= 0 ; 1 ; 2 ne seront utilisés qu’en cas de besoin, définit lors des 5 minutes de préparation
à la mission.
A chaque point de définition, le robot effectue un balayage de 360° pour tenter de repérer le
fardeau.
92.2.6. Description détaillée de la stratégie de retour
Une fois le fardeau saisi, le robot rejoint la ligne délimitant les frontières de la table et la suit vers la
droite jusqu’à atteindre le bac de dépose afin de prévenir tout risque de dérive de trajectoire due aux
imprécisions de moteurs ou à la fatigue de la batterie.
L’itinéraire de retour dépend donc du stade de l’exploration auquel le fardeau a été repéré puis saisi,
conformément au schéma explicatif ci-dessous.
n=5
n =6
n =7
n=4
n =8
n=3
102.3. Architecture Fonctionnelle Détaillée (LOT 23)
Nous avons décidé de présenter l’architecture fonctionnelle détaillée sous la forme d’un diagramme SADT :
REALISER LA MISSION
Démarrer Rechercher le S’approcher et Rechercher le bac S’approcher et Arrêt
manuellement support de saisir le de récupération déposer le fardeau automatique
fardeau fardeau
Analyser
Se
l’environnement de
Se Analyser déplacer
retour
déplacer l’environnement
Se Détecter Réaliser la Se Détecter le bac Réaliser le
déplacer le pilier préhension du déplacer de lâcher du
par fardeau récupération fardeau
contact par contact
Translater
Disposer d’une Tourner
source
d’énergie
Repérer les Repérer le bac Traiter les
Repérer les Repérer le Traiter les limites de données
limites fardeau données
récupération
Stocker Transmettre
l’énergie l’énergie
11Sur le diagramme précédent, les fonctions qui se répètent comme « se déplacer » ne sont détaillées qu’une seule fois pour alléger le schéma.
De même les sous-fonctions « Disposer d’une source d’énergie » et « Analyser l’environnement » n’ont été écrites qu’une seule alors qu’elles sont
évidemment présentes à chaque sous-fonction.
On peut alors choisir de détailler certaines fonctions sous la forme d’un diagramme eFFBD (fonctions sous forme enhanced Functional Flow Bloc Diagram).
Pour plus de précision, nous commençons par faire l’eFFBD de l’ensemble des fonctions remplies lors d’une mission :
Démarrer Rechercher le Approcher Rechercher le S’approcher et Arrêt
IT IT IT IT
manuellement support de et saisir le bac de déposer le automatique
fardeau fardeau récupération fardeau
On peut ensuite détailler séparément les sous-fonctions importantes:
Rechercher le
support de
S’approcher et
fardeau
saisir le
Distance
fardeau Luminosité 60cm
Avancer IT
Luminosité >50
12Capteur de
contact
S’approcher et
stimulé
saisir le
fardeau Distance
d < 20cm Avancer Réaliser la Rechercher le bac
IT lentement IT préhension de récupération
en ligne du fardeau
droite
Mémoriser
Se centrer la distance k
Avancer OU
IT en face du parcourue
fardeau jusqu’à ce
que d=d/2
IT
Distance
d > 20cm
Distance
d > 20cm
Rechercher le bac
S’approcher et
de récupération
Luminosité OU déposer le fardeau
< 45
Distance
Avancer en ligne Suivre la ligne d < 20cm
Reculer de la OU
IT droite jusqu'à IT noire jusqu’à
distance k puis ¼ détecter une détecter le bac de
tour droite bande noire récupération
1/4tour gauche puis
IT avancer jusqu'à détecter IT
Luminosité à nouveau la ligne noire
> 45
13Capteur de
contact
S’approcher et
stimulé
déposer le fardeau
Avancer
Distance Réaliser le lâcher
IT lentement IT
d < 20cm du fardeau puis
en ligne
droite reculer de 10cm
Se centrer
Avancer OU
IT en face du
fardeau jusqu’à ce
que d=d/2
Arrêt
automatique
Distance IT
d > 20cm
Ces différents diagrammes présentent la stratégie générale, ils nous ont permis de construire notre programme.
142.4. Architecture Organique Détaillée (LOT 24)
Architecture mécanique et électronique du robot :
Fardeau
Module préhenseur
Support de
fardeau Groupe
préhenseur
Bac de
récupération
Module détecteur de zone
Module traitement de données et
Capteur ultrasons transmission d'énergie Capteur
couleur
NXT
Capteur
Capteur luminosité
contact
Module détecteur d’objets Batteri
e
G.M.P gauche G.M.P droite
Module détecteur d'objets Bandes noires
Appui ponctuel
Sol blanc rigide
Module déplacement
: Câble (information + énergie) : liaison mécanique : échange d’énergie
: Détection Module déplacement : Action
: Module : Environnement
15On a ici décomposé le robot en 5 modules interdépendants qui sont :
Le module déplacement :
Composé comme on peut le voir ici de deux Groupe
MotoPropulseurs (G.M.P) et de l’ensemble appui
ponctuel.
Le module préhension :
Composé de l’ensemble pince en liaison engrenage
avec le moteur.
Le module détecteur d'objets :
Ce module comprend le capteur ultrason et le capteur
de contact qui détectent le pilier du fardeau et le bas
de récupération.
Le module détecteur de lignes :
Composé essentiellement du capteur de luminosité et
du capteur de couleur ; ces capteurs doivent détecter
si robot se trouve sur le sol blanc ou sur les lignes
noires.
Le module traitement de données et transmission d'énergie :
Ce module comprend uniquement le NXT, le jeu de pile
qui lui fourni son énergie et les câbles qui le relie aux
autres éléments du robot.
163. Dossier de définition (LOT 30)
3.1. Nomenclature de définition
Le tableau définissant le coût unitaire global du robot situé à la fin du lot 70 (7.5.) sert également de
nomenclature de définition.
3.2. Schéma d’interconnexion électrique
La batterie est constituée de 6 piles LR6. Ce sont elles qui alimentent le NXT, ce dernier jouant les
rôles de calculateur (type microcontrôleur) et du distributeur de puissance. Il alimente donc à la fois
les capteurs et actionneurs, de même qu’il reçoit les signaux captés et intègre ces données dans le
programme en cours d’exécution.
Propulsion :
Moteur gauche
Programmation :
Moteur droit
Ordinateur
Préhension :
Moteur de pince
Batteries
Détection d’environnement :
Capteur ultrason
Capteur lumière
NXT
Capteur couleur
Capteur contact
Transmission de puissance
Alimentation capteur
Retour de données
17On remarque qu’en réalité, même s’ils ne sont pas des « capteurs » à proprement parler, les
moteurs électriques retournent également des informations de type tachymètre.
Câblage du NXT :
1 : Capteur ultrason (câble moyen)
2 : Capteur lumière (câble long) placé à gauche
3 : Capteur de contact (câble moyen)
4 : Capteur couleur (câble court) placé à droite
A : Moteur gauche (câble moyen)
B : Moteur droit (câble long)
C : Moteur de pince (câble moyen)
3.3. Schéma de description de la chaîne cinématique
3.3.1. Cinématique du châssis
Le robot est en appui sur le sol sur trois points de contact.
une liaison ponctuelle jouant le rôle de « roue folle » Axe de rotation
deux liaisons linéaires rectilignes
des roues
Châssis
Sol
Roue
gauche
Roue
droite
3.3.2. Cinématique de la pince
Liaison engrenage de rapport de réduction 36dents/20dents, soit un rapport de 1.8 !!!
Donc pour que les pinces se referment jusqu’à contact, i.e. une course de 90°, il faut que le moteur
tourne de 90/1.8=50°
18Châssis
Moteur
Mors de pince
3.4. Plans d’ensemble du robot
Se référer au lot 20 (2.1.) où plusieurs vues du robot et de ses sous-ensembles qui le compose sont
détaillées.
3.5. Spécification de contrôle final
Vérifier la fixation du NXT.
Positionner les pinces ouvertes au maximum pour assurer la symétrie des deux mors de
pince.
Vérifier que les capteurs de couleur et de luminosité sont à 1cm du sol pour assurer des
mesures exploitables.
Vérifier la mise en butée de la chaîne d’engrenage pour limiter le jeu fonctionnel dans la
pince.
194. Dossier Justificatif De Définition (LOT 40)
Démarche de Référence
Critère Solution mise en mesure et des
Exigence Niveau exigé Dispersion
d'évaluation œuvre performances documents
atteintes preuves
Sortie du mode de Temps de Appui sur bouton
2 secondes Chronomètre Annexe tests
veille réaction du NXT
Déplacement en
Temps
Sortie de la zone de ligne droite sur Chronomètre
Positionnement 9 secondes Annexe tests
départ une distance mètre
prédéfinie
2 roues motrices
coaxiales et
pilotées
indépendamment,
appui ponctuel
Déplacement dans
pour la
la zone de Temps 61,5 secondes Chronomètre Annexe tests
stabilité du robot.
recherche
Stratégie
d'évolution
programmée dans
le NXT.
Détection du
distance Capteur ultrasons mètre 60 cm Annexe tests
fardeau
Capteur ultrasons
Centrage sur le Angle
+/- 20° Dimensionnement rapporteur Annexe tests
fardeau fardeau/robot
de la pince
Approche sur le Distance Mètre
fardeau positionnement rapporteur
Précision
Fermeture de la
Capture du fardeau placement Annexe tests
pince
Temps 23,5 secondes
Retour avec le Programme de
Temps 38 secondes Annexe tests
fardeau retour
Détection du bac
distance Capteur ultrasons mètre Annexe tests
de récupération
Dépose du fardeau Précision Ouverture de la
dans le bac placement pince
Détection des Capteurs couleur
Couleur
limites de la zone et de luminosité Test capteurs Annexe tests
luminosité
de recherche (redondance)
Éviter les chutes en
Programmation Vérification
dehors de l'aire de
logiciel embarqué logicielle in situ
jeu
20Démarche de Référence
Critère Solution mise en mesure et des
Exigence Niveau exigé Dispersion
d'évaluation œuvre performances documents
atteintes preuves
Mise en veille après Programmation Vérification
temps 2 secondes
la fin de la mission logiciel embarqué logicielle in situ
Effectuer la mission
Chronomètre Selon état
dans le temps tempsExigence Type Moyen de vérification Support de vérification
N'utiliser que les pièces du kit livré Contrainte Revue Dossier de développement
Pouvoir tester le robot Contrainte Revue Dossier de développement
Pouvoir effectuer la maintenance du
Contrainte Revue Dossier de développement
robot
Pouvoir se mouvoir sur une surface
Contrainte Revue Dossier de développement
plane et horizontale
Résister aux conditions de
température, pression et Contrainte Revue Notice Lego Mindstorms
hygrométrie
S'accommoder au support du
Contrainte Revue Dossier de développement
fardeau
Interagir avec la zone de
Contrainte Revue Dossier de développement
récupération
Réaliser 6 missions consécutives Contrainte Tests Annexes tests
Fonctionner pendant 4 heures Contrainte Tests Annexes tests
Faciliter la maintenance Contrainte Revue Dossier de développement
Pouvoir intervenir rapidement sur le
Contrainte Revue Dossier de développement
robot en cours de mission
5.2. Matrice de validation/qualification
Exigences Justification
Mise en marche manuelle du robot Cahier des charges et règlement RobAFIS
Localiser le fardeau Cahier des charges et règlement RobAFIS
Se déplacer jusqu'au fardeau Cahier des charges et règlement RobAFIS
Récupérer le fardeau Cahier des charges et règlement RobAFIS
Transporter le fardeau Cahier des charges et règlement RobAFIS
Déposer le fardeau dans le bac de récupération Cahier des charges et règlement RobAFIS
Désactiver le robot à la fin de la mission Cahier des charges et règlement RobAFIS
Faire partir le robot en marche avant Cahier des charges et règlement RobAFIS
Explorer la zone de recherche Cahier des charges et règlement RobAFIS
Réaliser une mission dans le temps imparti Cahier des charges et règlement RobAFIS
N'utiliser que les pièces du kit livré Cahier des charges et règlement RobAFIS
Pouvoir tester le robot Cahier des charges et règlement RobAFIS
Pouvoir effectuer la maintenance du robot Cahier des charges et règlement RobAFIS
Pouvoir se mouvoir sur une surface plane et horizontale Cahier des charges et règlement RobAFIS
Résister aux conditions de température, pression et hygrométrie Cahier des charges et règlement RobAFIS
S'accommoder au support du fardeau Cahier des charges et règlement RobAFIS
22
22Exigences Justification
Interagir avec la zone de récupération Cahier des charges et règlement RobAFIS
Réaliser 6 missions consécutives Cahier des charges et règlement RobAFIS
Fonctionner pendant 4 heures Cahier des charges et règlement RobAFIS
Faciliter la maintenance Cahier des charges et règlement RobAFIS
Pouvoir intervenir rapidement sur le robot en cours de mission Cahier des charges et règlement RobAFIS
Respecter les dimensions maximales Cahier des charges et règlement RobAFIS
Être capable de réaliser la mission sous un éclairement quasi
uniforme pouvant parfois apporter des zones d'ombres suivant Cahier des charges et règlement RobAFIS
l'état du robot et du fardeau
Pouvoir modifier le robot en moins de 30 min le jour de la
Cahier des charges et règlement RobAFIS
compétition
Pouvoir programmer le NXT via un ordinateur équipé d'un
Cahier des charges et règlement RobAFIS
programme adéquat
Pouvoir fournir l'ordinateur susnommé Cahier des charges et règlement RobAFIS
6. Dossier d’Etude de Maintenabilité et De Définition De La
Maintenance (LOT 60)
6.1. Dossier d’Etudes de Maintenabilité (LOT 61)
Le dossier d'études de la maintenabilité permet d'identifier les différents scénarios susceptibles de
dégrader les performances du robot pendant sa mission. Nous allons donc définir dans cette partie
les actions correctives à mettre en œuvre pour permettre une bonne continuation de la mission du
robot.
Dans un premier temps, nous avons réalisé une AMDEC (Analyse des Modes de Défaillance et de leur
Criticité) afin de mettre en évidence les modes de défaillance les plus néfastes à la réalisation de la
mission. L’indice de criticité permet donc de signaler au concepteur quels sont les points importants à
ne pas négliger.
23AMDEC (Analyse des Modes de Défaillance et de leur Criticité)
Criticité (échelles de 1 à 5)
Fonction Mode de défaillance cause possible effet indésiré Probabilité Risque de non Criticité Action préventive Action curative
Gravité
occurrence détection totale
Moteurs A et B hors Robot qui ne démarre Remplacement des deux
Perte de fonction -
d'usage pas 1 1 5 5 moteurs
Moteurs A ou B hors Robot qui tourne sur
Fonction dégradée - Remplacement d'un moteur
d'usage lui-même 2 1 5 10
Motorisation Dérive des valeurs d'un, Remplacement batterie,
Positionnement Adaptation du programme,
Fonction dégradée ou des deux, moteurs diminution de la commande
aléatoire du robot maintenance batterie
GMT 5 2 2 20 vitesse
Câblage moteur Robot qui tourne sur Plan de maintenance, Arrêt du robot et
Fonction dégradée
défectueux lui-même 2 2 5 20 vérification au branchement rebranchement correct
Pince qui ne
Perte de fonction Moteur C hors d'usage - Remplacement du moteur
fonctionne pas 1 2 5 10
Pince qui ne Programme informatique de Remplacement du capteur de
Préhension Perte de fonction Contact non détecté
fonctionne pas 2 3 5 30 maintenance contact
Pince initialement non Fardeau renversé et Plan de vérification visuelle Plan de vérification avant
Fonction dégradée
ouverte non saisi 2 2 5 20 avant chaque mission chaque mission
Perte de fonction NXT hors d'usage Robot ne démarre pas 1 1 5 5 - Remplacement du NXT
Programme non/mal Vérifier syntaxe du
Perte de fonction Robot ne démarre pas Recompilation du programme
Exploration compilé 2 2 5 20 programme
Comportement du
Mauvais programme Versionnage des différents Recompilation du Bon
Fonction dégradée robot incohérent avec
compilé programmes programme
la mission 2 2 4 16
Capteur ultrason hors Robot rendu "aveugle" Programme informatique de Remplacement du capteur
Perte de fonction
d'usage au fardeau 1 2 5 10 maintenance ultrason
Programme informatique de Rebranchement du capteur
Perte de fonction Capteur ultrason mal câblé Robot aveugle
2 2 5 20 maintenance ultrason
Câble de liaison ultrason
Repérage du fardeau Programme informatique de Remplacement du ou des
Perte de fonction coupé ou fiche Robot aveugle
maintenance câbles impliqués
endommagée 2 3 5 30
Capteur de mauvaise Redondance de la pince pour Programmation du centrage
Dispersion des angles
Fonction dégradée qualité, capteur saisir sur un champ angulaire par moyenne sur plusieurs
de centrage
endommagé 5 2 4 40 élargi valeurs
Capteurs lumière et/ou Risque permanent de Programme informatique de Remplacement du ou des
Perte de fonction
couleur hors d'usage chute 1 2 3 6 maintenance capteurs concernés
Rebranchement du ou des
Câblage défaillant ou Risque permanent de Programme informatique de
Perte de fonction capteurs, remplacement des
Détection des coupé chute maintenance
2 2 3 12 câbles si besoin
frontières de jeu
Une roue dans le vide
Redondance à la conception
Arrivée quasi parallèle au avant que le capteur Vigilance de l'équipe en
Fonction dégradée du robot : Double capteurs de
bord de table opposé ne détecte la prévention d'un cas de chute
détection de frontière
ligne 4 1 3 12
24Nous avons identifié les scénarios de défaillance suivants :
non-exécution du programme chargé dans le NXT
aucun programme chargé dans le NXT
mauvais programme chargé
défaillance d'un capteur
batteries déchargées
liaison au sol mal assurée
défaillance moteur
destruction partielle du robot après collision
Pour effectuer les interventions de maintenance pendant le temps imparti (en ou hors mission), nous
avons défini des exigences et performances nous permettant de respecter le cahier des charges.
Référentiel des exigences de maintenance du robot :
Type de défaillance Temps d'intervention
Non-exécution du programme6.2.2. Fiche de Maintenance II
En cas de mauvais programme chargé, le NXT doit être reprogrammé en moins de 40 secondes
Mode opératoire :
Arrêter le robot.
Connecter le NXT à un ordinateur équipé du logiciel Mindstorms
Charger le bon programme
Déconnecter le NXT
Redémarrer le robot.
Composants de rechanges :
aucun
Outillages :
un cordon USB et un ordinateur avec le bon programme
Temps estimé de d’intervention :
40 secondes
Plan d’action :
Assurer la formation des utilisateurs à la mise à jour du programme sur le robot.
Assurer la formation des utilisateurs à l’édition de programme
6.2.3. Fiche de Maintenance III
Si aucun programme n'est chargé, le NXT doit être programmé en moins de 40 secondes
Mode opératoire :
Arrêter le robot.
Connecter le NXT à un ordinateur équipé du logiciel Mindstorms
Charger le bon programme
Déconnecter le NXT
Redémarrer le robot.
Composants de rechanges :
aucun
Outillages :
un cordon USB et un ordinateur avec le programme
Temps estimé de d’intervention :
40 secondes
Plan d’action :
Assurer la formation des utilisateurs à la mise à jour du programme sur le robot.
6.2.4. Fiche de Maintenance IV
En cas de défaillance d'un capteur, celui-ci doit être remplacé en moins de 40 secondes.
Mode opératoire :
Arrêter le robot.
Retirer le capteur défaillant et le déconnecter
Remplacer le capteur par un neuf
Connecter le capteur au NXT
Redémarrer le robot.
Vérifier le bon fonctionnement du capteur
Composants de rechanges :
4 capteurs neufs
Outillages :
aucun
Temps estimé de d’intervention :
40 secondes
Plan d’action :
Assurer la formation des utilisateurs au changement de n’importe quelle pièce.
266.2.5. Fiche de Maintenance V
En cas de batteries déchargées
Mode opératoire :
Arrêter le robot.
Retirer les batteries déchargées du NXT
Les remplacer par des batteries chargées (ou par des piles)
Redémarrer le robot.
Composants de rechanges :
6 accumulateurs chargés ou 6 piles neuves
Outillages :
aucun
Temps estimé de d’intervention :
40 secondes
Plan d’action :
6 piles de rechanges chargées doivent être dans les pièces de rechanges.
le logement des piles doit être facilement accessible pour changer l’ensemble des piles en
moins de 40s.
6.2.6. Fiche de Maintenance VI
En cas de liaison au sol détériorée
Mode opératoire :
Arrêter le robot.
Retirer la/les roue(s) concernée(s)
Remettre le composant incriminé en position nominale (se référer au plan de montage)
Si un des composants de la roue est cassé, le remplacer
Redémarrer le robot.
Composants de rechanges :
composants constitutifs de la roue
Outillages :
aucun
Temps estimé de d’intervention :
40 secondes
Plan d’action :
Assurer la formation des utilisateurs au changement de n’importe quelle pièce.
6.2.7. Fiche de Maintenance VII
En cas de défaillance moteur
Mode opératoire :
Arrêter le robot.
Retirer le moteur défaillant et le déconnecter
Remplacer le moteur par un neuf
Connecter le moteur au NXT
Redémarrer le robot.
Vérifier le bon fonctionnement du moteur
Composants de rechanges :
3 moteurs neufs
Outillages :
aucun
Temps estimé de d’intervention :
40 secondes
Plan d’action :
Assurer la formation des utilisateurs au changement de n’importe quelle pièce.
276.2.8. Fiche de Maintenance VIII
En cas de destruction partielle
Mode opératoire :
Arrêter le robot.
Repérer les pièces démontées
Remonter les composants détachés en suivant le plan de montage
Redémarrer le robot.
Composants de rechanges :
aucun
Outillages :
plan de montage
Temps estimé de d’intervention :
3 minutes
Plan d’action :
Assurer la formation des utilisateurs au changement de n’importe quelle pièce.
6.2.9. Fiche de Maintenance préventive I
Vérification de l'état général du robot avant une mission
Mode opératoire :
Laisser le robot éteint
Vérifier le bon encastrement des pièces constitutives du robot
Remettre en place les pièces dont la tenue est douteuse
Démarrer le robot
Vérifier le bon fonctionnement des capteurs et des moteurs avec les fonctions de test
chargées dans le NXT
En cas de problème avec l'un des constituants, se reporter à la fiche de maintenance curative
correspondante
Plan d’action :
Assurer la formation des utilisateurs à la vérification du robot.
6.2.10. Fiche de Maintenance préventive II
Vérification de l'état des batteries à la fin de chaque mission.
Mode opératoire :
laisser le robot allumé
vérifier l'état de charge de la batterie au moyen de la jauge affichée sur le NXT
en cas de tension trop faible, se reporter à la fiche de maintenance V
Plan d’action :
Informer les utilisateurs du seuil de décharge à ne pas excéder.
6.3. Validation du Plan de Maintenance (LOT 63)
Exigence de Démarche de
Preuve de satisfaction
maintenabilité validation
Accessibilité de la batterie Revue Plan d'intégration vérification validation qualification.
Simulation d'une panne de batterie et mesure du temps pour
Mesure de la batterie Test
mesurer la tension aux bornes de celle-ci à l'aide d'un multimètre.
Remplacement d'une nappe Simulation d'une panne au niveau d'une nappe électrique et
Test
électrique mesure du temps de changement de cette nappe.
Test de bon fonctionnement
Test Mesure du temps pour démonter et tester les nappes électriques.
d'une nappe
28Démontabilité des moteurs
Revue Plan d'intégration vérification validation qualification.
de propulsion
Accessibilité du moteur de la
Revue Plan d'intégration vérification validation qualification.
pince
Démontabilité des capteurs Revue Plan d'intégration vérification validation qualification.
Mesure du temps pour charger un programme simple sur la brique
Pouvoir tester les moteurs Test
intelligente et tester un moteur.
Mesure du temps pour charger un programme simple sur la brique
Pouvoir tester les capteurs Test
intelligente et tester un capteur.
Mesure du temps pour charger un programme simple sur la brique
Étalonnage des capteurs Test
intelligente et étalonner un capteur.
7. Plan de Management (LOT 70)
7.1. Gestion et Suivi de projet (LOT 71)
7.1.1. Liste des jalons et attendus des points clés du projet
Septembre 2009
L M M J V S D
1 2 3 4 5 6
7 8 9 10 11 12 13
14 15 16 : Prise de 17 : Rédaction de 18 : Jalon 0 19 20
connaissance du la lettre de Envoi du dossier
projet motivation de candidature
21 22 23 : Jalon 1 24 : Réunion 25 26 27
Engagement du
projet
28 29 30
30 31
Octobre 2009
L M M J V S D
1 : Réunion 2 3 4
5 6 7 : Jalon 2 8 : Réunion 9 10 11
Avancement et
réception du kit
12 13 14 15 : Réunion 16 17 18
19 20 21 22 : Réunion 23 24 25
26 : Semaine 27 28 29 30 31
construction
robot
Novembre 2009
L M M J V S D
1
2 3 4 : Jalon 3 5 : Réunion 6 7 8
Point sur tests et
avancement
rapport
9 10 11 12 : Finalisation 13 14 15
du rapport IS
16 17 18 19 20 21 22
23 24 25 26 27 28 29
30
29La période allant de l’inscription (jalon 0) à la compétition couvre environ deux mois et demi.
L’importance d’organisé des séances hebdomadaires et de fixer des jalons fût donc très importante.
En effet cela nous a permis de rythmé le développement et d’établir des dates jalons afin d’optimiser
le travail réalisé. Ainsi les principales étapes ont donc étaient la phase d’inscription, toute l’analyse
du besoin avant de commencer la conception (matérialisé par le jalon 2 où nous avons également
reçu le kit) et la conception suivie des tests de validation de la solution (jalon 3).
7.1.2. Work Breakdown Structure (WBS)
Dans un premier temps nous avons défini un macro-planning afin de découper le projet en
différentes périodes :
Inscription
Concertation avec les futurs membres de l’équipes
Rédaction du dossier d’inscription
Envoie du dossier au comité RobAFIS
Analyse
Planning et attribution des tâches
Analyse fonctionnelle
Rapport (fil rouge du projet)
Développement
Conception du robot
Programmation de la mission
Tests
Rapport (fil rouge du projet)
Compétition
Voyage
concours
Ensuite dans le but d’organiser le développement du projet, nous avons divisé ce dernier en plusieurs
module chacun d’entre eux étant affecté à un ou plusieurs membres de l’équipe :
Chef de
projet
Sergio
Spécification Programmation Piloter le
Définition Maintenance IVVQ
Conception Tests projet
Rédiger Gestion Qualité, LOTS
LOT 30 Définir Définir LOT60/63 LOT 50
référentiel Benoît des Coûts, 70,71
Benoît architecture architecure Romain
des risques Délais Pierre
fonctionnelle organique
exigences
LOTS LOTS
LOT 10 LOT 40 LOT 24 LOT 73
20/23 72,74,75
Pierre Romain Sergio Pierre
Sergio Sergio
30Vous pouvez aussi lire