Sentinel-2 et SPOT 6/7 pour la segmentation sémantique de l'occupation du sol - Utilisation de données
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
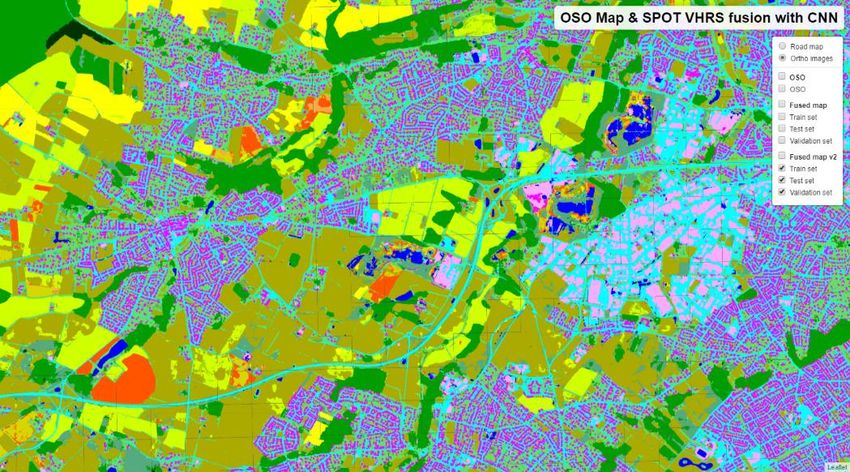
Utilisation de données Sentinel-2 et SPOT 6/7 pour la segmentation sémantique de l'occupation du sol Olivier STOCKER, Arnaud LE BRIS

Objectifs • Mise en place d’une approche par apprentissage profond pour la SegSem • Analyse d’enrichissement des nomenclatures OCS • Produits d’OCS urbains • Identification d’une complémentarité SPOT / S2 • Stratégies de fusion entre SPOT et S2 TEMU 2020 3

/ • Mise en place d’une architecture • Analyse d’enrichissement de nomenclatures • Produits d’OCS urbains • Comparaison capteurs • Fusion de données TEMU 2020 4

Architecture précédemment utilisée Architecture CNN proposée par [Postadjian & al., 2017] ◦ 110k paramètres entraînables (architecture légère) Source : [Postadjian & al., 2017] Approche fenêtre glissante : ◦ classification d’une imagette de 65x65 pixels pour chaque pixel de la carte de prédiction Inconvénient : Faible conservation information spatiale Fonctionnement de l’approche par fenêtre glissante TEMU 2020 5

Architecture proposée Architecture entièrement convolutive Conçue pour conserver information spatiale d’une ◦ 1300k paramètres entraînables donnée pas si résolue: ◦ Connexions directes (‘skip’) Basée sur architectures : ◦ Transfert des indices de pooling ◦ U-NET [Ronneberger & al., 2015] ◦ Faible champ réceptif ◦ Deconv-NET [Noh & al., 2015] TEMU 2020 6

Hyperparamètres Fonction Loss : Learning rate : ◦ Entropie croisée pondérée ◦ Start : 10−2 ◦ Step : 50 époques , = (− + log( exp( ))) ◦ γ : 0.7 ◦ Pondération des classes : 0, = 0 = 1 , Optimiseur : ◦ Adam, HP par défauts [Kingma and Ba, 2014] Weight decay : ◦ Retiré car incompatibilité avec Batch-Norm [Ioffe and Szegedy, 2015] TEMU 2020 7

Validation expérimentale RÉGION D’INTÉRÊT DONNÉES Images satellites : Diffusion du Pôle Théia ◦ SPOT-6/7 ◦ Sentinel-2 Vérité terrain issue de produits d’OCS : ◦ BD Topo, RPG, Urban Atlas, OCS-GE, BD Ortho Répartition de la vérité terrain Entrainement Validation Test 64 % 16 % 20 % Régions d’intérêt encadré en rouge TEMU 2020 8

Validation de l’architecture Image SPOT VT Fenêtre glissante Entièrement convolutive Résultats : F score moyen ◦ Meilleure gestion de l’information spatiale THR SPOT Architecture OA (%) (%) ◦ Rapidité d’entrainement Fenêtre glissante 92,0 85,0 Entièrement convolutive 93,3 91,0 Convergence en 2h contre 11h précédemment TEMU 2020 9

Validation de l’architecture TEMU 2020 10
Validation de l’architecture TEMU 2020 11
Validation de l’architecture TEMU 2020 12
/ • Mise en place de l’architecture • Analyse d’enrichissement de nomenclatures • Produits d’OCS urbains • Comparaison capteurs • Fusion de données TEMU 2020 13
Analyse de nomenclatures ++ Nomenclatures axées THR SPOT Conclusions de l’analyse : 1. Erreurs liées à l’enrichissement de nomenclatures principalement intra-classes SegSem par CNN stable 2. Pour segmentation sémantique efficace : Plus nomenclature fine, plus nécessite VT qualité Textures uniques pour chaque classe Image SPOT VT Inférence selon 18 classes TEMU 2020 14
/ • Mise en place de l’architecture • Analyse d’enrichissement de nomenclatures • Produits d’OCS urbains • Comparaison capteurs • Fusion de données TEMU 2020 15
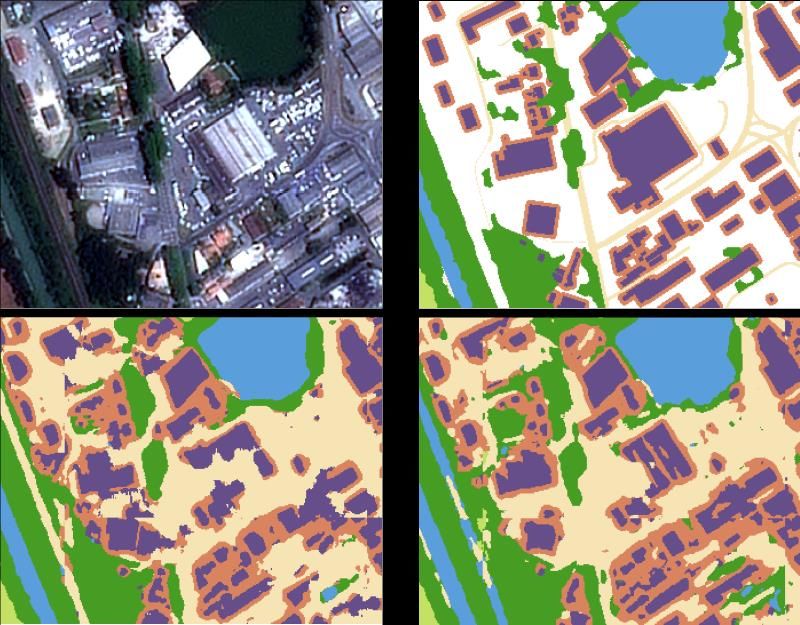
Inférence d’Urban Atlas Objectif : extraction niveaux densité d’urbanisation Lié à la présence de bâtiments : potentiel de télédétection fort Image SPOT VT Inférence Résultats : ◦ Détection tâche urbaine efficace ◦ Notions de gradients de densité floues ◦ Difficulté construction frontières humainement logiques TEMU 2020 16
Inférence d’Urban Atlas Objectif : extraction niveaux densité d’urbanisation Lié à la présence de bâtiments : potentiel de télédétection fort Image SPOT VT Inférence Résultats : ◦ Détection tâche urbaine efficace ◦ Notions de gradients de densité floues Nécessité d’un champ réceptif plus large ◦ Difficulté construction frontières humainement logiques TEMU 2020 17
Amélioration détection végétation urbaine ◦ VT créée à partir de BD et de classifications par méthode classique non profonde depuis ortho-images et MNS (d’ancienneté 6 ans) ◦ Complexification de nomenclature avec distinction végétation haute/basse Image SPOT VT initiale Pseudo-VT TEMU 2020 18
Amélioration détection végétation urbaine Avec VT initiale issue de la BD Topo Image SPOT VT initiale Inférence avec VT initiale TEMU 2020 19
Amélioration détection végétation urbaine Avec Pseudo-VT issue de la BD Topo et enrichie par résultats classification (ancienneté 6 ans) Image SPOT Pseudo-VT Inférence avec pseudo-VT TEMU 2020 20
/ • Mise en place de l’architecture • Analyse d’enrichissement de nomenclatures • Produits d’OCS urbains • Comparaison capteurs • Fusion de données TEMU 2020 21
Comparaison capteurs SPOT et Sentinel-2 Entre THR et MS uniquement ◦ Une seule date S2, mais dates d’acquisition proches : SPOT : fin Juin 2018 S2 : Juillet 2018 (synthèse mensuelle) ◦ Résolution spatiale identique = contexte équivalent Suréchantillonnage de S2 à 1,5m Mais utilisation de toutes les bandes S2 à 10 ou 20 m TEMU 2020 22
Comparaison capteurs (%) IoU Eau Cultures Chemins Rts principales Aérodromes Parkings Cimetières Tps bts Résidentiel SPOT 86,7 93,7 12,7 65,0 42,1 69,9 30,2 64,3 56,9 S2 86,2 91,8 5,4 60,9 39,0 70,4 21,7 55,9 50,0 Conifères Feuillus Forêts ouvertes Haies Landes Peupleraies Vergers Vignes Industriel SPOT 37,0 80,6 9,0 44,3 26,1 27,9 2,3 85,0 46,0 S2 35,3 80,1 5,0 42,9 26,3 26,1 3,6 11,1 48,7 A priori sur potentiel de complémentarité SPOT / S2 Tampons bâtiments + Feuillus + Eau + Forêts ouvertes ? Cultures ++ Haies ++ Chemins ? Landes +++ Routes principales +++ Peupleraies ? Aérodromes +++ Vergers ? Légende : ? : aucun a priori Parkings +++ Vignes + + : apport faible Cimetières + Résidentiel + ++ : apport significatif Conifères +++ Industriel +++ +++ : apport majeur TEMU 2020 23
Comparaison capteurs Conclusions : ◦ SPOT : Frontières plus précises entre objets Meilleure lecture des textures ◦ Sentinel 2 : Meilleure détection matériaux à propriétés optiques particulières Difficultés de conclusions sur la complémentarité Image SPOT VT Inférence S2 Inférence SPOT TEMU 2020 24
Comparaison capteurs Image SPOT Image S2 Image SPOT Image S2 Inférence SPOT Inférence S2 R V B PIR Inférence SPOT Inférence S2 R V B PIR TEMU 2020 25
Comparaison capteurs Image SPOT VT Image SPOT VT Inférence SPOT Inférence S2 R V B PIR Inférence SPOT Inférence S2 R V B PIR TEMU 2020 26
Comparaison capteurs Image SPOT VT Image SPOT VT Inférence SPOT Inférence S2 toutes bandes Inférence SPOT Inférence S2 toutes bandes TEMU 2020 27
/ • Mise en place de l’architecture • Analyse d’enrichissement de nomenclatures • Produits d’OCS urbains • Comparaison capteurs • Fusion de données TEMU 2020 28
Architecture proposée pour la fusion Architecture inspirée de FUSE-NET [Hazırbaş et al., 2016] : ◦ 2 Encodeurs avec sorties concaténées avant dernier étage ◦ Encodeur HD : connexions résiduelles vers le décodeur Restrictions actuelles : Images à même résolutions 3 types de fusion : ◦ Tardif avec cartes de segmentation (CS) ◦ Tardif avec probabilités (Pro) ◦ Précoce avec images (Img) TEMU 2020 29
Fusion des capteurs Evolution du score mIoU au cours des époques pour les méthodes CS, Pro et Img Données fusion issues de l’architecture individuelle proposée CS (%) mIoU OA IoU Tampons Eau Cultures Routes Végétation Bâtiment S2 64,1 88,7 49,1 80,1 92,3 46,6 79,1 37,6 SPOT 76,8 93,0 65,7 83,5 94,8 66,9 84,7 65,3 Fusion CS 77,9 93,2 66,6 84,7 95,3 69,0 84,1 67,4 Fusion Pro 78,6 93,5 66,1 86,1 95,7 71,3 84,4 68,0 Pro Fusion Img 77,7 93,5 66,9 84,9 95,8 68,1 85,4 65,3 Conclusions : ◦ Approches fusion > approches individuelles ◦ Fusion tardive : Entrainements plus rapide Img Architecture surdimensionnée ◦ Fusion précoce ◦ Architecture non optimisée TEMU 2020 30
Fusion des capteurs Meilleure détection des bâtiments industriels Confirme a priori Image S2 Inférence S2 Inférence SPOT Inférence SPOT VT Inférence fusion CS Inférence fusion Pro Inférence fusion img TEMU 2020 31
Fusion capteurs Image SPOT VT Image SPOT VT Inférence SPOT Inférence S2 toutes bandes Inférence SPOT Inférence S2 toutes bandes TEMU 2020 32
Fusion capteurs Image SPOT VT Image SPOT VT Inférence SPOT Fusion Inférence SPOT Fusion TEMU 2020 33
Reclassification du produit OSO Fusion tardive dans un contexte d’inaccessibilité à la donnée originel de la classification à améliorer Image SPOT (non contractuelle) Produit OSO reclassifié Produit OSO TEMU 2020 34
Reclassification du produit OSO Exemple de correctif du produit OSO par fusion tardive OSO/SPOT Produit OSO Produit OSO reclassifié VT sur fond d’image SPOT Image SPOT TEMU 2020 35
Conclusions / TEMU 2020 36
Conclusions et perspectives Analyse Complémentarité SPOT S2 : • THR SPOT bénéficie à toutes les classes Délimitation et analyse de texture • Conclusions non définitives sur la complémentarité Ex: dans certains cas, impossible de conclure sur la bonne classe de végétation Prototypage de la fusion : • Meilleure détection globale Gain en modularité : • Propriété de stabilité de la SegSem : Production produit OCS à nomenclature très fine → Fusion de classes suivant besoin utilisateur • Rapidité entrainement et performance modèles fusion probabilités : Production BD cartes probabilités → Fusion en en fonction besoin utilisateur TEMU 2020 37
Conclusions et perspectives Quelles utilisations pour les classifications obtenues ? • Amélioration inférences SPOT • Génération produits CS complets – Applications : Amorces de mise à jour, détection de changement Analyse spatiale pour déduire cartographie des morpho-types urbains (Urban Atlas) Classification 6 classes Classification à partir d’indices multi-échelles Urban Atlas dérivés de la classif 6 classes TEMU 2020 38
Conclusions et perspectives Perspectives méthodologiques Adaptation architectures : ◦ Fusion tardive : réduction nombre de paramètres ◦ Fusion précoce : intégration dimension temporelle capteur S2 … mais aussi possibilité de plusieurs sorties : multi-tâches TEMU 2020 39
Merci de votre attention Bibliographie : [Hazırbaş et al., 2016] Hazırbaş, C., Ma, L., Domokos, C., and Cremers, D. (2016). Fusenet : Incorporating depth into semantic segmentation via fusion-based cnn architecture. [Inglada et al., 2017] Inglada, J., Vincent, A., Arias, M., Tardy, B., Morin, D., and Rodes, I. (2017). Operational high resolution land cover map production at the country scale using satellite image time series. Remote Sensing, 9(1). [Noh et al., 2015] Noh, H., Hong, S., and Han, B. (2015). Learning deconvolution network for semantic segmentation. CoRR, abs/1505.04366. [Postadjian & al., 2017] T. Postadjian, A. Le Bris, H. Sahbi, et C. Mallet, “Investigating the potential of deep neural networks for large-scale classification of very high resolution satellite images,” ISPRS Annals of the Photogrammetric, Remote Sensing and Spatial Information Sciences, vol. IV-1-W1, pp. 183–190, 2017. [Ronneberger & al., 2015] Ronneberger, O., Fischer, P., & Brox, T. (2015, October). U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical image computing and computer-assisted intervention (pp. 234-241). Springer, Cham. TEMU 2020 40
Produits existants Analyse capacité de l’architecture sur nomenclatures produits existants : i. OCS-GE CS ii. OCS-GE US iii. Urban Atlas VT continue : Sensibilité accrue au décalage temporel entre image et VT TEMU 2020 41
i. OCS-GE Couverture du sol Vérité terrain : OCS-GE 2016 issue ortho-images acquises en 2013 5 ans d’écart avec image SPOT (Juin 2018) Image SPOT OCS-GE CS (VT) Inférence Résultats : ◦ prometteurs malgré le décalage temporel mIoU (%) OA (%) ◦ Scores impactés par sous-représentation 41,73 81,57 Matrice de confusion, VT de certaines classes dans VT Métriques de tests globales colorisation selon la précision Prédiction TEMU 2020 42
Apprentissage i. OCS-GE Couverture du sol Si évolution CS non aléatoire : Biais d’apprentissage Entraine erreurs de SegSem Test Image SPOT OCS-GE CS (VT) Inférence TEMU 2020 43
ii. OCS-GE Usage du sol Image SPOT OCS-GE US (VT) Inférence Résultats faibles : Classes à faible potentiel de télédétection Usage du sol = texture similaires entre classes Matrice de confusion, VT Architecture inadaptée : colorisation selon la précision Prédiction ◦ Peu profonde mIoU (%) OA (%) impossibilité créer des attributs de haut niveau 35,89 81,53 ◦ Faible champ réceptif Métriques de tests globales se concentre sur texture et pas sur contexte TEMU 2020 44
Vous pouvez aussi lire

















































