Vérification, Validation virtuelle - La Plate-forme d'Intégration Virtuelle (PIV), un outil au service de la Validation
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Vérification, Validation virtuelle
La Plate-forme d’Intégration Virtuelle (PIV),
un outil au service de la Validation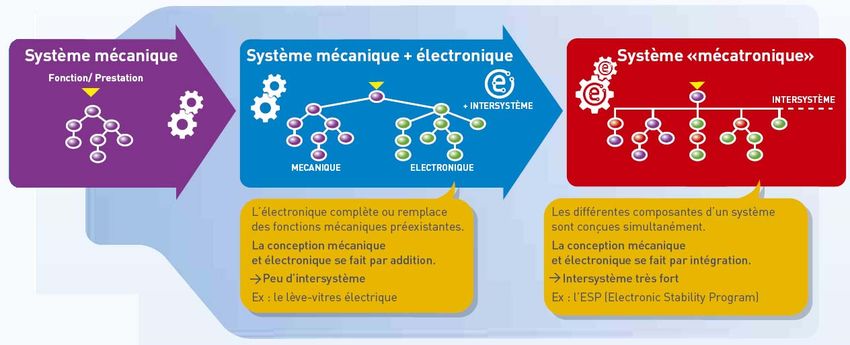
Evolution de l’électronique automobile
80 % des innovations
dans l’automobile sont
directement liées à
l’électronique.
P/2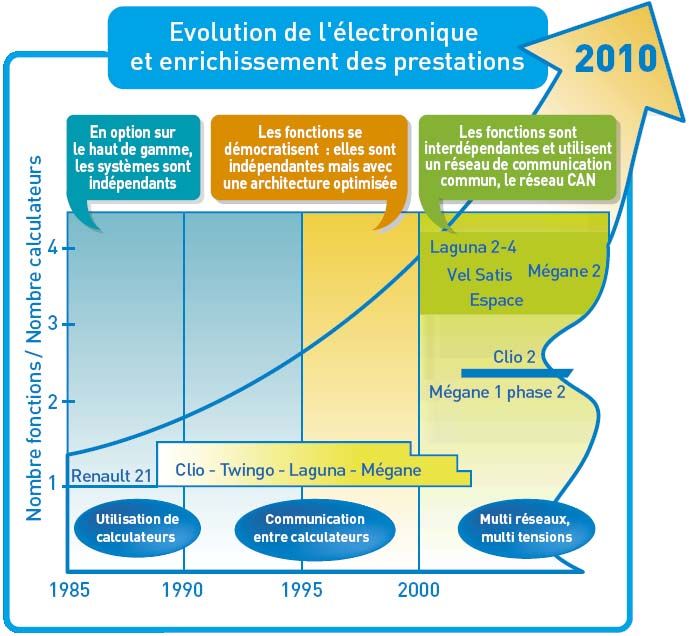
Des voitures de plus en plus intelligentes
AFU FPA RV / LV
Assistance au Freinage Frein de Parking Assisté
Régulateur / Limiteur de Vitesse
d’Urgence
ESP
Electronic Stability Program
Aide au Parking
SSPP
ACC Système de Surveillance de
la Pression des Pneus
Adaptative Cruise Control
P/3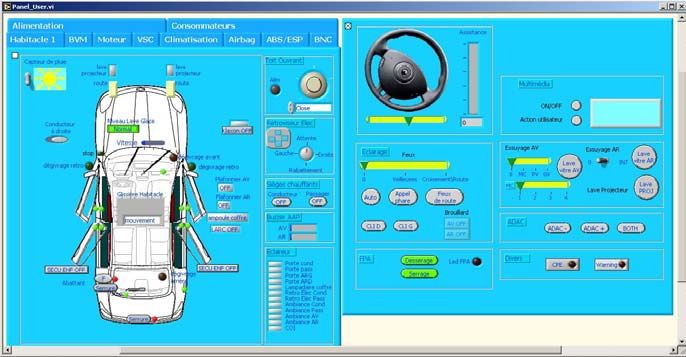
Les limites de la conception classique
De la mécanique … à l’électromécanique
… où les limites de la conception classique, vers une ingénierie
système
P/4
Ingénierie Système
• Faire évoluer le processus de conception :
– Une spécification accrue et mieux formalisée,
– L’intégration de la vérification & de la validation en boucle
courte et de façon continue tout au long du cycle de
développement et ce dès les phases amonts : il faut utiliser
tout le potentiel des Validations Numériques :
• 60% des dysfonctionnements sont injectés dans les phases de
spécification
• Et aujourd’hui, 55% des erreurs sont détectées dans les phases
de test, en aval de l’implémentation.
• Un dysfonctionnement détecté en phase amont
(Spécification/Modélisation) coûte 100 fois moins cher que s’il
est détecté lors des tests d’intégration.
Un process de développement centré sur la modélisation :
MBD (Model-Based Design) avec une traçabilité sur
l’ensemble du cycle Exigences / Modélisation /
Simulation.
P/5
Model-based Design
Idéedu
Idée produit
produit Produit
Plans de validation, intégration
Prestations /
Processus Exigences Tests Processus
véhicule
de conception Boucle V&V
Plans de d’intégration
Spécifications validation,
systèmes intégration
Tests
Boucle V&V
d‘intégration PIE
Specs inter-
systèmes
Boucle V&V
Prototypage Tests
Plateforme -rapide unitaires Bancs systèmes
d’Intégration Achat,
(HIL)
Spécifications
Virtuelle & Banc techniques des
composants
réutilisation,
fabrication des
composants
Virtuel Conception Produit-
(D-EIPF/PIV) Process
P/6
Les méthodes de validation, les tests …
• La génération automatique de vecteurs de test :
Aider le testeur à faire un choix judicieux parmi les
données d’entrées pour améliorer la validation
fonctionnelle
• Partitionnement en Classes d’Equivalence,
• Analyse aux bornes du domaine - Test aux Limites,
• Test Statistique d’Usage.
Approche par : Méthodes : Formats de sorties :
• modèles à états, • tests aux limites, • TestStand®
TestStand®,
• basées sur la logique, • statistiques d’usage, • Tesis ®,
• algébriques, • chaînes de Markov, • rtf,
rtf,
•… •… • HTML,
• XML,
•…
Outis de Test in View
génération
automatique
de tests Interface de
pilotage
Spécification Cas de test Moyens de Test
Modèle Formel
P/7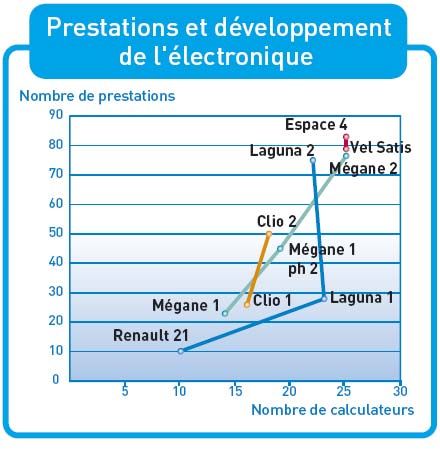
Combinaison des outils / modèles Simulink/Stateflow ®
Traçabilité tout au long du processus de conception
Gestion des exigences
Plan de test
Plan de
enrichi et
test initial
optimisé
Outils
Validation Validation
Vérification Analyse par classes Génération
Modèle d’équivalence automatique de test
Modèle Modèle Modèle
A VERIFIER &
VERIFIE VERIFIE VERIFIE
A VALIDER
A VALIDER VALIDE VALIDE
Rapports
Rapport de Rapport de Rapport de
vérification validation Couverture
P/8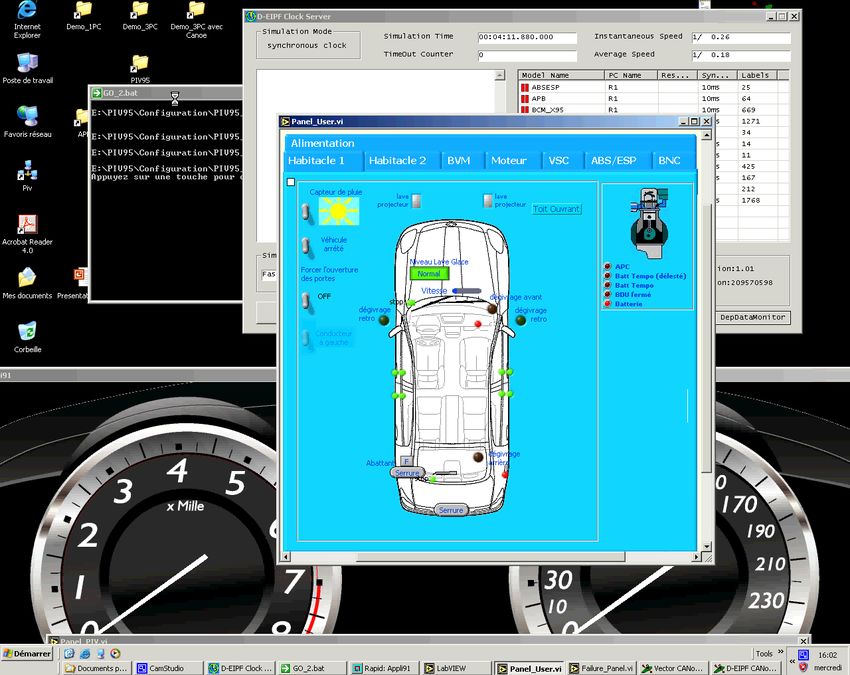
La PIV, un outil de Validation Numérique
• Née d ’une idée commune Renault/Nissan et développée par
Nissan, la D-EIPF (PIV) est un environnement de simulation
distribuée pour l ’intégration des ECUs virtuels (spécifications
exécutables) et la validation fonctionnelle des échanges inter-
systèmes.
• Elle permet de faire communiquer, de façon synchrone et/ou
asynchrone, des exécutables provenant de différents
environnements de modélisation: StateMate,
Simulink/Stateflow, LabVIEW, CANoe, Simplorer, RapidPLUS,
Altia-Design
Calculateur USM
Calculateur BCM
CANoe
CANoe (BCM)
(USM)
Réseau Multiplexé
CAN
P/9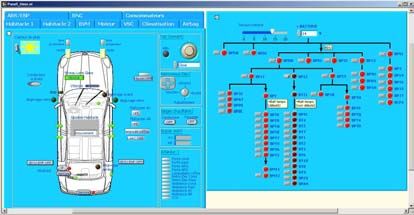
PIV, l’architecture
• Fonctionnant sous architecture Windows, elle utilise des PC Bi-
Xéon 3Ghz, 4Go RAM & des cartes réseau 1 Gbyte
Modèle virtuel
EtherNet 1 Gigabit “signaux virtuels” de l’Environnement
Contrôle et mesure TdB/NAV ECU
(monitoring) Prototypage rapide
(Simulink)
Interface CAN
(CANoe) CAN Network
ECU
(StateMate)
Modèle Véhicule
P / 10Les modèles/IHM qui composent le PIV
EtherNet 1 Gigabit
Control Panels
ECM
PC n°3
BCM DAE ABS-ESP
StateMate
Emulation APB USM
other
ECU
Sensor/Actuator
Card
Rear SteeringLock CANoe FPA
Reader
Wiper
PC n°1 PC n°2
: ECU Simulink/Statefloow specifications models : NI Labview HIM / Panels & models
: ECU Statemate specifications models : RapidPLUS IHM P / 11P / 12
Couplage PIV - Architecture de Tests … en cours
NI Environment
Common Test
cases R/RSM/N NI TestStand (sequenceur) (Labview)
PIV/BANC/PIE
Local server
DSPACE Environment
(Via CLIB / RTPLib)
Test in View
Test suites,
Models,
Management,
Report
generation
(post-processing)
Diagnostic Tools
DDT 2000, CONSULT
(Traminator)
Utilisation de messageries CANStress
CANdb++ CANoe
Véhicule / Privative
P / 13La PIV, quels types de Validation
Numérique Physique
Intégration & Validation sur PIV :
-Validation fonctionnelle des fonctions distribuées (essuyage, etc.) -Bancs Système,
-SdF et SdF intersystèmes
-Intégration virtuelle (au niveau des spécifications) des différents -Intégration sur PIE
systèmes
- Validation des communications CAN (cohérence des messages,
charge du bus, Endormissement et du réveil par le CAN, …)
Validations fonctionnelles Numériques
Prototypage Numérique
Mulet Numérique
Vagues véhicules
(C lot, S lot, …)
P / 14Les enjeux de la PIV
• Réduction des coûts :
– Les résultats d’exploitation de la PIV montrent un potentiel de détection
des dysfonctionnements équivalent aux PIE ~ 300 erreurs
– L’outil permet de valider les spécifications et l’intégration système très
en amont du cycle par boucles courtes intégrées au cycle de
développement, de ce fait on réduit le nombre de mulets nécessaires et
l’on peut envisager de limiter les phases de tests sur PIE tout en
minimisant le risque de laisser passer des défauts.
• Réduction des délais :
– Validation fonctionnelle dans les phases amonts des systèmes
distribués,
– Maîtrise de la complexité des systèmes,
– Investigation rapide et économique des différentes architectures et
composantes E/E d’un véhicule
– Études des variantes et validation des solutions « locales »
P / 15Les résultats PIV
Retour d’expérience PIV : projet XX En moyenne, la PIV* sur un
projet véhicule ont permise de
détecter 2,8% d’erreurs de
Erreur de conception : 2,8% Autre : 10% conception à corriger en amont.
Fausse alerte : 5,2% Par ailleurs, 28% d’erreurs de
spécification et 37% erreurs de
Erreur nom signal : < 1% Erreur de spécification : modélisation (source potentielle
28,2% des défauts en développement)
ont été détectées.
Le nombre total des défauts
détectés par la PIV est supérieur
Erreur PIV : 16,2% à 100. Ceci est comparable au
Erreur de modèle : 36,7% nombre de défauts trouvés sur
les PIEs aujourd’hui)
Plus largement, c’est donc l’ensemble du cycle de développement
basé sur la Modélisation qui permet de réduire de plus de 30 %
les délais du cycle de développement et participe à la mise en
œuvre du tout numérique.
P / 16Validation numérique, PIV, l’avenir …
• L’avenir de la PIV :
– Utilisation sur périmètre plus restreint, par métier Body,
Châssis, …
– Passage en Temps Réel déterministe (Validation des
aspects HardWare)
– Intégration de nouvelles typologies de réseaux multi-plexés :
FlexRay
• Améliorations futures des validations Numériques :
– Préparation et vérification automatiques des tests qui seront
rejoués indifféremment sur la PIV, les Bancs système & les
PIEs.
– Partage et capitalisation des vecteurs de test.
– Déploiement tous projets des méthodes de V&V (outils en
second plan).
P / 17Merci de votre attention …
P / 18Vous pouvez aussi lire