Ac vités de recherche de l'équipe PR du laboratorie MIS - Fabio MORBIDI Laboratoire MIS
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Localisation et Navigation de Robots
M2 EEAII, parcours ViRob, A.U. 2017-2018
Ac�vités de recherche de l’équipe PR
du laboratorie MIS
Fabio MORBIDI
Laboratoire MIS
Équipe Perception Robotique
E-mail: fabio.morbidi@u-picardie.fr
2
Laboratorie MIS
Vous
êtes ici
3
Laboratorie MIS: présentation
MIS: Modélisation, Information & Systèmes
V Laboratoire de l’UPJV (Amiens et Saint-Quentin)
V Thèmes de recherche (TIC):
V Automatique
V Cryptographie
V Informatique
V Recherche opérationnelle
V Robotique et vision par ordinateur
V Environ 90 personnes
V 50 permanents
V 40 doctorants, post-doctorants, ingénieurs de recherche
V 2 secrétaires et 2 techniciens (H. Midavaine)
4
Laboratorie MIS: organisation
Directeur: G. Dequen
1) Équipe PR (Perception Robotique): resp. G. Caron et E. Mouaddib
V 8 Permanents: 6 Maître de Conférences (Caron, Kachi, Morbidi, Potelle), 2 Professeurs
V 9 doctorants (J. Caracotte, S. Renaux), 2 ingénieurs de recherche (T. Potin, T. Gokhool)
2) Équipe COVE (Commandes et Véhicules): resp. A. El Hajjaji
3) Équipe GOC (Graphes, Optimisation et Contraintes): resp. C.-M. Li
4) Équipe SDMA (Systèmes Distribués, Mots et Applications): resp. V. Villain
5
Équipe PR: activités de recherche
Plate-formes
robotiques de
l’équipe PR
6
Équipe PR: activités de recherche
1) Caméras non-conventionnelles
V Modélisation de caméras omnidirectionnelles (catadioptriques, multi-fisheye),
plénoptiques et RGB-D (ex. Kinect de Microsoft)
V Conception d’algorithmes de calibration
V Applications: asservissement visuel, localisation/navigation de robots
mobiles et cartographie basées vision
Système “four-in-one”: 4 miroirs Caméra plénoptique ou Caméra catadioptrique
paraboliques, une caméra “light-field ” (Lytro) avec miroir hyperbolique Caméra twin-fisheye
orthographique (uEye) (Ricoh Theta S)
7
Équipe PR: activités de recherche
2) Drones
V Modélisation (multi-rotor, voilure fixe) Bebop 2
de Parrot
V Perception embarquée et fusion multi-capteurs
V Commande (basée vision): position et d’attitude
V Optimisation énergétique de trajectoire
Pelican de Ascending
Technologies
Phantom 4 de DJI DISCO FPV de Parrot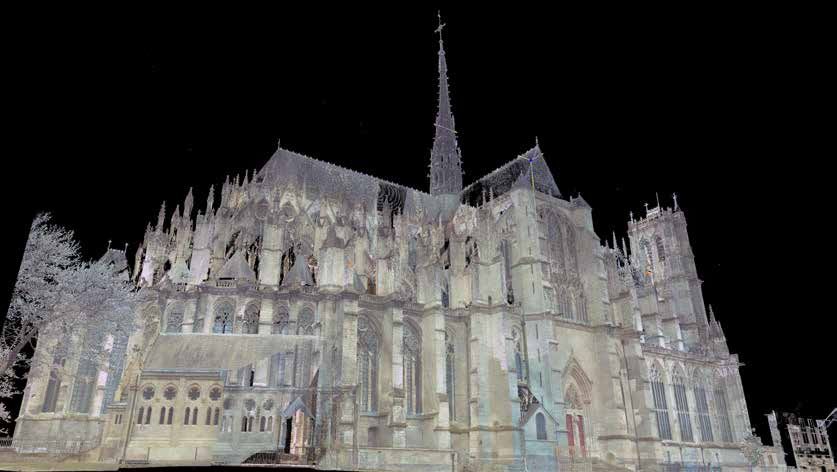
8
Équipe PR: activités de recherche
3) Realité virtuelle et systèmes immersifs
V Numérisation et modélisation 3D
V Lasergrammétrie et photogrammétrie Oculus Rift
V Aide à la navigation dans un environnement 3D (realité virtuelle/augmentée)
V Préservation et valorisation du patrimoine culturel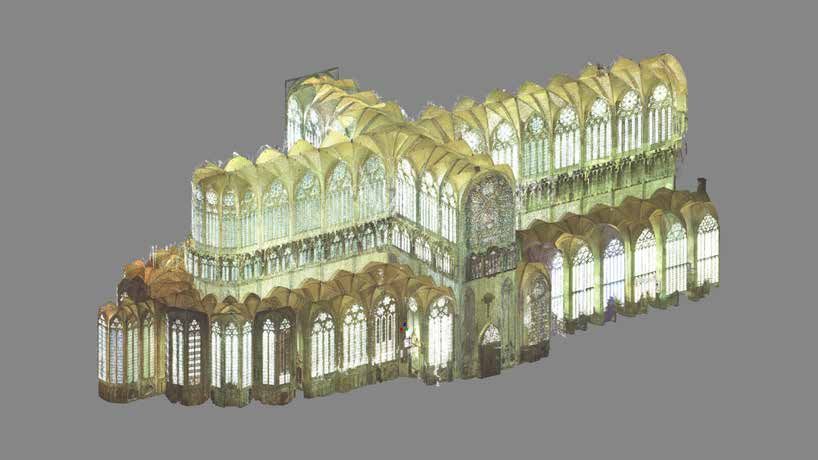
9
Équipe PR: activités de recherche
"Haar invariant signatures and spatial recognition using omnidirectional visual information only",
O. Labbani-Igbida, C. Charron, E. Mouaddib, Auton. Robot. vol. 30, n. 3, pp. 333-349, 2011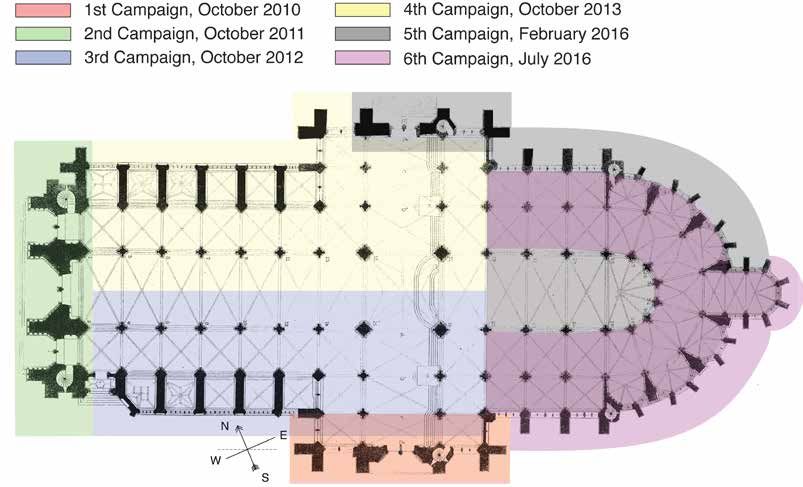
11
Équipe PR: activités de recherche
Camera omnidirectionnelle
Compas visuel
✓?
Image de référence Image actuelle
Robot mobile
(Pioneer 3-AT)12
Équipe PR: activités de recherche
Compas visuel basé sur la méthode
de la correlation phase
V Direct (aucune segmentation de l’image)
V Précis
V Robuste aux changements d’éclairage
V Caméra partialement calibrée
V Environnements non-structurés
Image omnidirectionnelle Fenêtre 2-D de Module de la transformée
Hamming log-polaire de Fourier
“Phase Correlation for Dense Visual Compass from Omnidirectional Camera-Robot Images”,
F. Morbidi, G. Caron, in IEEE Robotics and Automation Letters, vol. 2, n. 2, pp. 688-695, avril 201713
Équipe PR: activités de recherche
Gyroscope visuel sphérique basé sur le mélange
de potentiels photométriques
Drone Disco de Parrot avec une
V Nouvelle representation d’une image caméra twin-fisheye (Ricoh Theta S)
sphérique basée sur le Mélange de
Potentiels Photométriques (MPP)
V Le gyroscope est précis, robuste
et facile à utiliser (un seul paramètre
de réglage)
V Validation expérimentale: caméra twin-
fisheye montée sur l’effecteur d’un robot
industriel et sur un drone à voilure fixe
V SVMIS: dataset d’images disponible
gratuitement sur Internet
“Spherical Visual Gyroscope for Autonomous Robots using the Mixture of Photometric Potentials”,
G. Caron, F. Morbidi, in Proc. IEEE Int. Conf. Robot. Autom., mai 2018, to appear14
Équipe PR: projets de recherche
-- Robots Autonomes --
1) SEARCH: “Système d’Exploration Aérienne pour la Recherche et la Cartographie
en milieu Hostile”
V Projet de la région Picardie (2012-2015): laboratoires MIS et Heudiasyc (UTC)
2) COALAS: “Plateforme Cognitive pour l’Assistance aux Personnes Dépendantes”
V Projet U.E. Interreg IVA (2012-2015): France-Angleterre
3) ADAPT: “Dispositifs d'assistance à l'autonomisation de personnes handicapées
grâce à la robotique”
V Projet U.E. Interreg IVA (2017-2021): France-Angleterre15
Équipe PR: projets de recherche
1) SEARCH: “Système d’Exploration Aérienne pour la Recherche
et la Cartographie en milieu Hostile”
Visible
+ +
IR
V Exemple: recherche et détection automatique de personnes en difficulté
(marée haute) dans la Baie de Somme
V Un seul drone ou une cohorte de drones à voilure fixe (meilleure autonomie)
V Multi-modalité: lumière visible & infrarouge (IR)16
Équipe PR: projets de recherche
2) COALAS: “Plateforme Cognitive pour l’Assistance
aux Personnes Dépendantes”
Démonstrateur
Caméra
panoramique
V Fauteuil roulant semi-autonome
V Équipe PR: navigation basée sur la vision omnidirectionnelle
(asservissement visuel photométrique)17
Équipe PR: projets de recherche
3) ADAPT: “Dispositifs d'assistance à l'autonomisation
de personnes handicapées grâce à la robotique”
16 partenaires (8 français, 8 anglais)
Axes du projet:
V Réalisation d'un fauteuil roulant électrique intelligent et connecté compensant
les handicaps des utilisateurs grâce à des technologies d'assistance à la conduite
V Réalisation d'un simulateur de conduite en
réalité virtuelle pour une expérience immersive du
fauteuil roulant
V Formation destinée aux professionnels
de santé sur les apports du numérique
pour les technologies d'assistance
http://adapt-project.com18
Équipe PR: projets de recherche
-- Numérisation 3D --
E-cathédrale: “Réalisation et exploitation d'une maquette numérique
de la cathédrale d'Amiens”
V Programme de recherche sur 15 ans (2010-2025): plusieurs partenaires locaux
(Amiens Metropole) et projets satellites
4) SUMUM: “Stratégie de docUmentation MUltiéchelle, multiModale du patrimoine
culturel et naturel : acquisition, traitement, étude et diffusion”
V Projet ANR, 4 partenaires français (2017-2021)
5) ScanBot: “Scanners Robotisés pour la Numérisation Automatique du Patrimoine”
V Projet de la région Hauts-de-France (avec l’ONERA, à partir de sept. 2018)
6) IGNIFUSION: “Cartographie Précise et Complète de Réseaux Hydrauliques
Complexes: Application aux Systèmes d'Extinction Automatique d'Incendie”
V Thèse CIFRE co-financiée par l’ANRT (2018-2021)19
Équipe PR: projets de recherche
E-cathédrale: “Réalisation et exploitation d'une maquette
numérique de la cathédrale d'Amiens” (porteur: Prof. E. Mouaddib)
V Le modèle 3D obtenu est destiné au grand public, aux jeunes (pédagogie dans les écoles)
et aux spécialistes (conservation du patrimoine, études d’histoire de l’art, etc.)
V Nuage d’environ 10 milliards de points colorés
V Modèlisation 3D de la charpente de la flèche
Site web: https://mis.u-picardie.fr/E-Cathedrale20 Équipe PR: projets de recherche V Campagnes de numérisation (octobre 2010-juillet 2016)
21
Équipe PR: projets de recherche
Technologies utilisées pour la numérisation 3D:
V Lasergrammétrie (scanners lasers Leica ScanStation C10 et Faro Focus3D X 130)
V Photogrammétrie aérienne et terrestre (avec l’IGN)
V Topographie
Leica ScanStation Faro Focus3D22
Équipe PR: projets de recherche
Scanners lasers et cibles dans la cathédrale
Scanner laser
Cibles sphériques23 Équipe PR: projets de recherche Octobre 2011 Juillet 2016
24
Équipe PR: projets de recherche
Arcs-boutants
Toiture des collatéraux (côté sud-est)
Poutres de la charpente25 Équipe PR: projets de recherche V Lasergrammétrie Chœur: vue du côté nord-est (Printemps 2016)
26 Équipe PR: projets de recherche V Lasergrammétrie Vue de l’intérieur, côté nord-est (Printemps 2016)
27
Équipe PR: projets de recherche
V Photogrammétrie Modèle 3D du
transept sud (laser)
16 images à haute résolution prises sur un arc de circle
à une distance de 20 m du portail (14 novembre 2016)
Modèle 3D du portail du transept sud
logiciel MicMac (5 millions de points)28
Équipe PR: projets de recherche
Navigation pertinente dans un nuage de points 3D [Habibi et al.’14]
Projet Assiduitas29
Équipe PR: projets de recherche
Navigation pertinente dans un nuage de points 3D [Habibi et al.’14]
Projet Assiduitas30
Équipe PR: projets de recherche
5) ScanBot: “Scanners Robotisés pour la Numérisation
Automatique du Patrimoine”
En Picardie …
V 1607 immeubles (édifices et jardins), dont la conservation présente un intérêt
historique ou artistique (au 31 décembre 2011)
V Coût des travaux dans les chantiers de restauration des monuments classés
en péril: 43.67 M€ en 200731
Équipe PR: projets de recherche
5) ScanBot: “Scanners Robotisés pour la Numérisation
Automatique du Patrimoine”
En Iran… En Syrie…
La statue du grand Bouddha (Dipankara) Le temple de Baal à Palmyre (32 ap. J.-C.).
avant et après sa destruction en mars 2001 Le 30 août 2015, le site a été détruit
par les Talibans à l'explosif par l'État Islamique32 Équipe PR: projets de recherche 5) ScanBot: “Scanners Robotisés pour la Numérisation Automatique du Patrimoine”
33
Le Doctorat de Recherche
V Le doctorat est le diplôme universitaire le plus haut
V Le doctorat est fait au sein d’un laboratoire ou unité de recherche (34 unités à l’UPJV)
V Le doctorant est encadré par un directeur de thèse HDR (et un co-encadrant)
V Le doctorat a une durée de 3 ans en France et en Europe (jusqu’à 5 ans aux États-Unis):
il se termine par une soutenance de thèse devant un jury
V Financements: allocation ministérielle, fonds région/U.E., CIFRE (avec une entreprise)
V Le doctorat ouvre la porte à des positions permanentes dans les universités et dans les
labos de recherche publiques et privés (en France: CNRS, INRIA, CEA, ONERA, Thales, etc.)
V Pour plus d’infos, visitez la page web de l’Ecole Doctorale Sciences, Technologie, Santé
de l’UPJV (directeur: A. El Hajjaji)
www.u-picardie.fr/ecoles-doctorales/edsts/accueil/34
Localisation et Navigation de Robots
M2 EEAII, parcours ViRob, A.U. 2017-2018
Ques�ons/commentaires sur le:
V Parcours ViRob ?
V Projet transversal ?Vous pouvez aussi lire