Comprendre les données visuelles à grande échelle
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Comprendre les données visuelles à grande échelle Karteek Alahari & Diane Larlus December 20th 2018 © 2017 NAVER LABS. All rights reserved.

Organisation du cours
l Séance du jeudi 20 décembre – 8h15 à 11h15
l Deuxième cours
l Présentation article 1 + quizz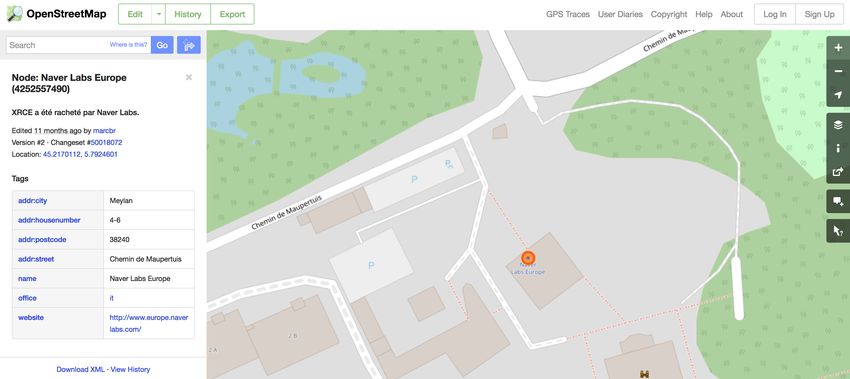
é à
è
é à é
é
Représentation d’images avec application à la recherche visuelle l Représentation d’images: introduction l Recherche visuelle d’images: introduction l Représentations locales des images l Représentations globales des images l Représentations d’images par apprentissage profond l Construction d’un système complet (étalés sur les cours 2 et 3 + les deux prochains articles sont pertinents)
Représentation des images – introduction
Comprendre les données visuelles à grande échelle
Cours 2: représentations locales, 30 décembre 2018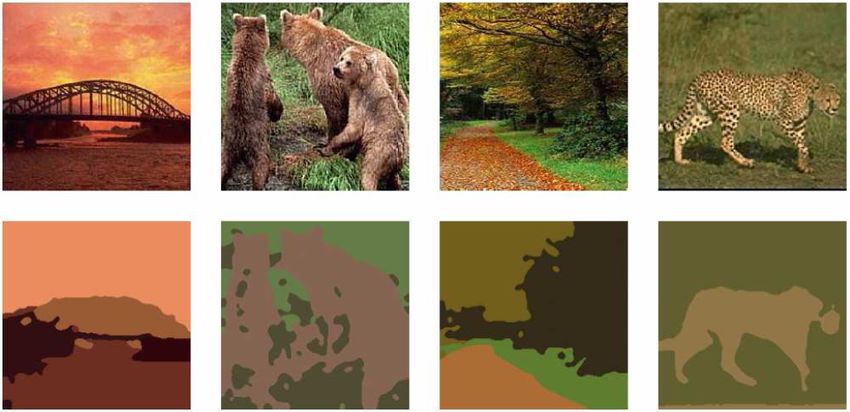
Espaces de représentation : Plan l Du monde réel à la description numérique l Représenter : pour quelle application ? l Difficultés l Indices visuels l Représentations globales vs représentations locales l Représentations « profondes »

Du monde réel à la représentation numérique
l À notre échelle, les signaux que nous désirons acquérir sont continus
l Leur représentation sur des supports numériques nécessite une opération de
discrétisation destructrice
→ par opposition aux supports analogiques (bruit)
l On distingue deux types d’opérations de discrétisation
► L’échantillonnage
► La quantification
L’échantillonnage
l C’est l’opération qui consiste à choisir un support discret pour le signal
► support temporel (son, vidéo, …)
► support spatial (image, vidéo)
► support 3D (scanner, …)
l Il est généralement régulier, mais pas nécessairement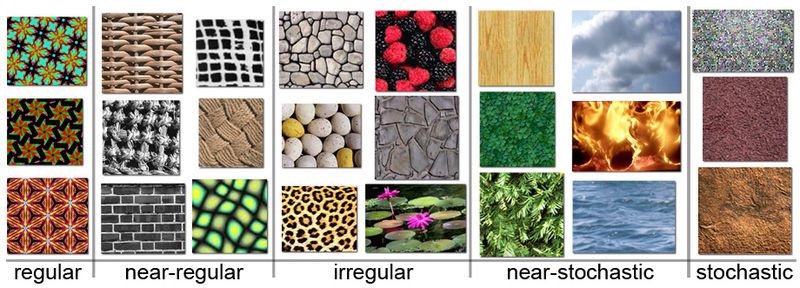
L’échantillonnage
l Le niveau de discrétisation requis est fonction de la plage de fréquence que l’on veut
pouvoir restituer
l Effet de moiré – fréquence vidéo
l halftoning
pour éviter le moiré :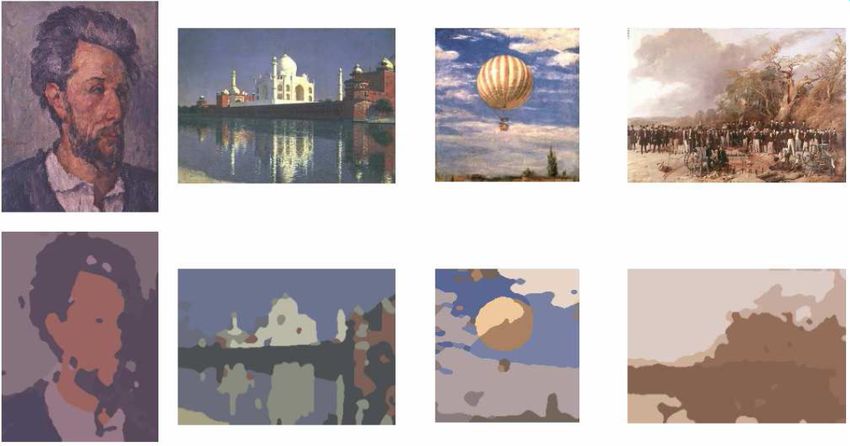
Quantification
l C’est l’opération de discrétisation des amplitudes du signal
l Dans un sens plus général, la quantification peut être vectorielle
f: Rd → F, avec F={1,2,..k} ensemble fini d’entiers
l La quantification définit un diagramme de Voronoï:
→ une décomposition d’un espace métrique déterminée par les distances à un
ensemble discret de pointsExemple de discrétisations du signal
IMAGE (couleur)
l Echantillonnage: 3 grilles de valeur, 1 grille par composante de couleur
► Bayer pattern:
► Les capteurs photographiques sont sensibles à l’intensité non à la couleur
► Une solution: des filtres devant chaque photodiode
► La perception humaine est plus sensible au vert
l Quantification: RGB : 8 bits de quantification pour chaque couleur
⇒ 24 bits par pixels (pixel = élément du support du signal)La couleur
l Espace de représentation RGB (Red, Green, Blue)
► représentation additive des couleurs sur la base de la lumière émise
► le plus souvent, chaque canal est représenté sur 8 bits
⇒ 16,7 millions de couleurs possibles
l YUV (Y: luminosité, U et V: chrominance)
l HSV (Hue, Saturation, Value)
► Bonne représentation perceptuelle des couleurs,
utilisée dans les logiciels
l CMYK (cyan, magenta, yellow, key)
► Espace de couleur soustractive (application des encres)
l CIELAB
l espace de couleurs “perceptuel”Espaces de représentation : Plan l Du monde réel à la description numérique l Représenter : pour quelle application ? l Difficultés l Indices visuels l Représentation globale vs représentation locale l Représentations « profondes »
Représenter pour décrire
l Application à la recherche visuelle d’images par le contenu
► focus du cours sur les images (de nombreux principes sont transférables à
d’autres modalités)
► description des images pour les retrouver par leur contenu
l Problème très différent de celui de la compression
► on ne cherche pas à reconstruire (la plupart des informations n’ont pas
d’utilité directe pour la recherche, alors qu’en reconstruction elles
contribuent au confort visuel)
► on cherche à extraire ce qui sera pertinent pour l’application visée
l Applications très variées (cf premier cours), ici la recherche du
même objet dans une imageEspaces de représentation : Plan l Du monde réel à la description numérique l Représenter : pour quelle application ? l Difficultés l Indices visuels l Représentation globale vs représentation locale l Représentations « profondes »
Appearance variation – instance level
scale
reference image viewpoint
occlusion illumination
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Appearance variation – category level
Camera pose Illumination Deformation Occlusion
Background clutter Intraclass variationIndices visuels
l Ici, focus sur l’image, mais s’applique directement à la vidéo
l Indices visuels (visual features)
caractéristiques de l’image, au sens de notre perception
d’humain, que l’on cherche à utiliser pour la tâche considérée
l Principaux indices visuels
► couleur
► forme
► texture
► régions
► mouvement (pour la vidéo)Indice visuel : couleur
l Utile pour la catégorisation (= trouver la classe d’objet) ou le tracking (suivre des
objets)
l Indice visuel ayant reçu beaucoup d’attention de part sa simplicité
► de nombreux descripteurs (globaux ou locaux)
l Exemple: Robocup 2006...Indice visuel : couleur
l Problèmes
► choix de la représentation de la couleur
► distance entre couleurs
► invariance de la couleur
► Indice visuel insuffisant si utilisé seul, car peu discriminant (pomme vs Ferrari)
l Remarque : le plus souvent, une image en niveaux de gris ou même en noir et
blanc suffit à un humain pour effectuer la tâche demandée !Couleur - illustration Exemple de descripteur couleur: histogramme de la couleur des pixels Illustration de son invariance au changement de point de vue
Indice visuel : forme
l Nombreux algorithmes d’extraction de formes
l Bestiaire (non exhaustif) :
► extraction des contours
► chaîne de points de contours ou approximation polygonale
► mise en correspondance de graphes
l Indice visuel différent des régions (1D vs. 2D)
l Difficultés
► l’étape d’extraction des contours est souvent instable
► séparer la forme du fond est difficile (problème de segmentation)
V. Ferrari, L. Février, F. Jurie, C. Schmid, Groups of Adjacent Contour Segments for Object Detection, PAMI 2008Indice visuel : texture
l Définition: variations répétitives de l’intensité
l Les textures résultent de propriétés physiques des surfaces 3D (herbe, nuages), ou de propriétés
photométriques de surface (zèbre, tissu à fleurs)
l Une grande partie du contenu des images et vidéos peut être caractérisée par leur texture
l L’humain reconnaît facilement les textures, mais elles sont difficiles à définir (et donc à
représenter): transition micro/macro, textures irrégulières…
l Deux types de méthodes
► statistiques : distributions spatiales des intensités de l’image
► géométriques : segmentation de motifs qui se répètentRégions texturées l Illustrations: lorsqu’on enlève les textures d’une image
Indice visuel : régions
l Prend en compte la répartition spatiale de zones « homogènes »
+ attributs intrinsèques aux régions (taille, couleur, etc)
l Peut capturer les relations spatiales entre ces régions (ciel en haut / mer en bas)
l Problème: l’extraction des régions est sensible au bruit et aux occultations (problèmes
similaires à l’extraction des contours)Comparaison des indices visuels
l Pour une utilisation “brute” des différents indices visuels
l De nombreuses approches plus sophistiquées existes, notamment basées sur
l’apprentissage
l Notion de descripteur associé à un indice visuel
Indice visuel Avantages Limitations
Extraction très facile, Pas d’information spatiale,
Couleur peu de lien avec la sémantique
propriétés globales de l’image
contient presque toute sémantique difficile à extraire
Forme de la forme
l'information sémantique
Texture caractéristique facile à reconnaître
difficile à définir :
Chicken and egg problem
Région Intègre les relations spatialesLimites de ces indices visuels • Richard Gregory’s Dalmatian image
Espaces de représentation : Plan l Du monde réel à la description numérique l Représenter : pour quelle application ? l Difficultés l Indices visuels l Représentation globale vs représentation locale l Représentation « profonde »
Description globale Une description globale est une représentation de l’image dans son ensemble, sous la forme d’un vecteur de taille fixe Mesure de (dis-)similarité définie sur l’espace de ces descripteurs Exemple : histogramme de couleurs Nombreux autres exemples dans la suite du cours
Description locale
Une description locale est une représentation de l’image par un
ensemble de descripteurs (vecteurs)
• Vecteurs calculés localement pour différentes parties de l’entité
ex: plusieurs sous-parties d’une image
La mesure de similarité nécessite le calcul d’une similarité entre
deux ensembles de descripteurs, par exemple par la mise en
correspondance (appariement) de ces descripteurs
Étude détaillée de ce type de description dans la suiteReprésentation globale ou locale ?
l Avantages des représentations globales
► Souvent, extraction des descripteurs pour un coût de calcul plus faible
► Comparaisons plus simples : comparaisons des entités avec un vecteur unique, donc pas
de mise en correspondance géométrique
l Inconvénients des représentations globales
► Représentation parfois trop grossière, qui perd les détails
l Avantages des représentations locales
► Résistance intrinsèque à la plupart des transformations
► Plus robustes et plus riches: statistiques dépendantes de plusieurs descripteurs
l Inconvénients des représentations locales
► en description locale, chaque information individuelle n’est pas très discriminante
► souvent la description est aussi volumineuse que l’image d’origine
Remarque: les descripteurs locaux peuvent être agrégés pour obtenir une représentation globaleEspaces de représentation : Plan l Du monde réel à la description numérique l Représenter : pour quelle application ? l Difficultés l Indices visuels l Représentation globale vs représentation locale l Représentation « profonde »
Représentations “profondes”
• Un réseau de neurones (par exemple un CNN ou Convolutional Neural Network) est appliqué à une
image
• On utilise l’une des sorties (souvent l’avant dernière) produites par le réseau comme représentation
de cette image
• Intuitivement, si le réseau est utilisé pour une tâche de reconnaissance pertinente (par exemple la
classification), une représentation ainsi extraite contient des informations sémantiques utiles
• Le calcul d’une mesure de similarité entre deux représentations de ce type peut être utilisé par un
système de recherche d’images
Input image
CNNRecherche visuelle d’images – introduction
Comprendre les données visuelles à grande échelle
Cours 2: représentations locales, 20 décembre 2018Visual Search - Principle Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018
Visual Search - Principle Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018
Visual Search - Applications
Many applications
• Reverse Image search
• Web search engine
• Personal photo collection
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Visual Search - Applications
Many applications
• Geolocalization
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Visual Search - Applications
Many applications
• Query for more information
• Landmarks
• Paintings
• Movies
• Book covers
• Game covers
• Packaged food
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Visual Search - Applications
Many applications
• Shopping interfaces
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Visual Search - Applications
Many applications
• Ambient Intelligence
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Inherent ambiguity
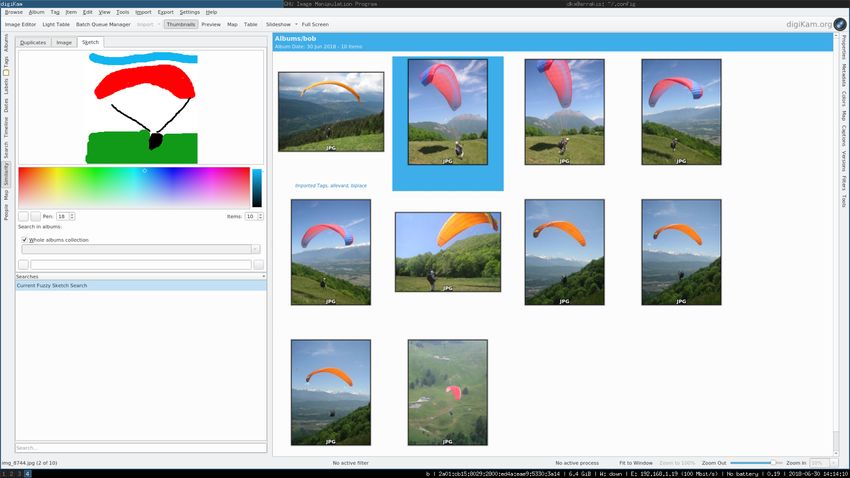
What can the user mean with such a single query?
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Inherent ambiguity
What can the user mean with such a single query?
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Inherent ambiguity
What can the user mean with such a single query?
Application dependent!
• Inject prior information
• Leverage training
Diane Larlus PRAIRIE Artificial Intelligence Summer School July 2nd 2018Inherent ambiguity
What can the user mean with such a single query?
Information a priori:
• Design à la main de descripteurs
Application dependent! pertinents ou de méthodes
pertinentes pour la vérification en
• Inject prior information fonction de l’application visée
Apprentissage:
• Leverage training • On laisse le système apprendre tout
ou partie du design, en particulier
quelles sont les caractéristiques
pertinentes pour la tâcheVous pouvez aussi lire