DARIUS : Conception et réalisation d'une plateforme de drone autonome pour des applications à portée sociale
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
DARIUS : Conception et réalisation d’une
plateforme de drone autonome pour des applications
à portée sociale
Simon Blanchard∗ , Simon-Pierre Boyogueno∗ , David Brodeur∗ , Maxime Brunelle∗ , Adrien Burghraeve∗ ,
Ronan Cimadure∗ , Frédéric Darveau∗ , Quentin Delorme† , Jérémie Faucher-Goulet∗ , Nadan Kulenovic‡ et Steve Pelchat∗
∗ Université de Sherbrooke, Sherbrooke, Canada,
† ISEP, Paris, France et ‡ ESIEE Paris, Paris, France
courriel : contact@dariusquad.com
Résumé—Les véhicules aériens non-habités, ou drones, sont voie d’être utilisés dans de nombreux autres domaines. En ef-
de plus en plus répandus dans le marché. La demande est fet, la demande est grandissante pour des applications à portée
grandissante pour des applications à portée sociale de ce type de sociale de ce type de technologie. L’inspection de bâtiments
technologie. L’inspection de bâtiments de même que la recherche
et le sauvetage de personnes en détresse ou disparues ne sont de même que la recherche et le sauvetage de personnes en
que quelques exemples de telles applications. L’usage répandu détresse ou disparues en sont quelques exemples. Rapides et
de drones suppose que de plus en plus de personnes n’auront petits, les drones sont en mesure d’atteindre par la voie des
pas les qualifications requises pour les piloter adéquatement. airs des endroits difficilement accessibles pour une personne
Afin de palier à ce problème, l’article décrit la conception et et de couvrir des zones de recherche plus efficacement.
la réalisation d’un drone de type quadricoptère en proposant un
système décisionnel et de contrôle autonome basé sur une archi- Plusieurs projets en aéromodélisme sont populaires et
tecture à trois niveaux. Cette architecture assure l’intégration de offrent des performances de base à un prix raisonnable, mais
tous les sous-modules électriques, électroniques et informatiques peu de projets offrent un contrôle autonome complet du drone.
de façon cohérente. Ainsi, le quadricoptère est en mesure de gérer Or, avec l’usage de plus en plus répandu de ces véhicules aé-
efficacement ses déplacements sans intervention humaine. riens, davantage de personnes se retrouvent sans formation afin
Du point de vue logiciel, une structure comportementale hy-
bride gère les décisions de haut niveau en évaluant la trajectoire d’être en mesure de les piloter. La tendance pour le contrôle
à suivre et la vitesse à laquelle la plateforme doit se déplacer. d’appareils de plus en plus sophistiqués est donc de limiter
Elle est implémentée sur un ordinateur à faible consommation les consignes humaines, plus susceptibles d’occasionner des
qui assure une bonne puissance de calcul pour ce genre de tâches erreurs de pilotage, puis de les remplacer par des consignes
en plus de gérer la communication avec l’opérateur au sol. Un logicielles.
système temps-réel basé sur un micro-contrôleur TMS570LS3137
avec processeur ARM est chargé de récupérer les consignes de Le Département de génie électrique et de génie informatique
vitesse de cet ordinateur et d’asservir l’orientation ainsi que la de l’Université de Sherbrooke participe à la recherche qui
vitesse linéaire du drone pour respecter ces consignes. Ce système s’effectue dans ce secteur et propose de nouvelles solutions
transmet à son tour une consigne de vitesse de rotation pour technologiques pour répondre aux besoins qui se manifestent.
chaque moteur à un système de contrôle des moteurs composé de C’est dans cet esprit que le projet DARIUS (i.e. Drone Aérien
quatre cartes électroniques recevant ces consignes et asservissant
la rotation des moteurs en contrôlant les systèmes à entraînement de Recherche et d’Inspection de l’Université de Sherbrooke)
variable. est né. D’autres projets tels que VamUdeS [1] s’intéressent
Le prototype actuel est en mesure de supporter son propre aussi aux véhicules aériens non-habités en développant un
poids de 7,1 kg en plus d’une charge utile atteignant 1kg. avion miniature. Le projet DARIUS s’inscrit donc dans la
L’autonomie de ses batteries est de 18 minutes, ce qui est continuité des travaux du Département de génie électrique
intéressant pour le type d’applications recherchées. Le système
décisionnel et de contrôle a été validé lors de simulations des
et de génie informatique en la matière en développant un
sous-modules de l’architecture et par des tests systèmes sur le nouveau type de plateforme, un quadricoptère, et en innovant
prototype. sur l’architecture de contrôle utilisée. Le choix de ce type de
Mots-clés—Aérospatiale, systèmes électroniques, architecture plateforme est en raison de sa capacité à décoller sur place et
logicielle, robotique, systèmes intelligents, systèmes de capteurs. à se stabiliser facilement à une position fixe par rapport au sol.
La solution qui est proposée se veut suffisamment flexible et
I. I NTRODUCTION modulaire pour être réutilisable dans différents projets à venir.
Les véhicules aériens non-habités, ou drones, constituent un Cet article présente le système de contrôle autonome du
secteur de recherche relativement récent et en pleine efferves- drone et principalement son architecture à trois niveaux en
cence avec de plus en plus de projets amateurs et universitaires. incluant les éléments électroniques et informatiques assurant
Initialement associés au secteur militaire, ces véhicules sont en l’asservissement du drone, ses mécanismes de sécurité ainsi
que la communication avec l’utilisateur au sol. déplacements par lui-même, de vérifier son état de fonctionne-
ment interne et de s’adapter à son milieu de manière autonome.
II. É TAT DE L’ ART Tout cela nécessite un système d’auto-pilotage plus performant
que ce qui est proposé par les projets décrits ci-haut.
Les projets amateurs dans le domaine sont nombreux. Parmi De plus, dans une application réelle, le temps de vol
eux, on retrouve ArduPilot [2], basé sur la plateforme de maximal d’un drone ne doit pas être limité à quelques minutes,
développement libre Arduino [3], qui propose un système mais doit être suffisamment long pour permettre un usage
d’auto-pilotage pour véhicules aériens de toutes sortes. Ef- intéressant tel que balayer complètement du haut des airs une
ficace et de faible coût, ses capacités sont toutefois limitées. zone terrestre. Pour une plus grande flexibilité, le drone doit
L’autonomie en énergie maximale est seulement de quelques également être en mesure de supporter le poids de capteurs
minutes avant que la recharge des batteries soit nécessaire. ou d’outils particuliers qui lui seront ajoutés en fonction de
L’utilisation d’un processeur 8-bits limite aussi la capacité de la tâche à accomplir. L’autonomie des batteries et le poids de
calcul de l’appareil et empêche l’utilisation de techniques plus l’appareil sont donc deux contraintes majeures qui doivent être
poussées en robotique et en intelligence artificielle. En cas équilibrées pour répondre à ces besoins.
de défaillance du système, i.e. d’une panne, d’un problème Le projet DARIUS a pour but de concevoir et réaliser
de communication, d’une surchauffe ou encore d’un bris à un drone capable de s’insérer dans un environnement réel
la structure, rien n’indique que l’appareil sera en mesure de et d’être en mesure d’interagir avec cet environnement en
réagir correctement. tenant compte des critères définit ci-haut. La section III
STARMAC [4] est un projet réalisé à l’Université de Stan- présente la problématique et les objectifs du projet DARIUS.
ford qui utilise un quadricoptère afin de valider des modèles La plateforme proposée ainsi que son système décisionnel et
mathématiques d’aérodynamisme ainsi que des techniques de contrôle sont décrits en détail à la section IV. Les sections
de vol ou des manoeuvres acrobatiques sécuritaires [5]. La V et VI présentent respectivement la méthodologie employée
plateforme développée à cet effet est similaire à celle proposée pour calibrer et valider les performances du système, puis les
par ArduPilot, mais utilise un microcontrôleur différent. Les résultats obtenus et leur analyse.
capacités de calculs sont similaires dans les deux cas. La
plateforme STARMAC est aussi caractérisée par un faible III. P ROBLÉMATIQUE
poids. Elle n’est pas conçue pour supporter une charge utile Le choix du type de plateforme requise pour les besoins
élevée. visés s’est arrêté sur un quadricoptère en raison de sa capacité
D’autres projets s’intéressent également à l’asservissement à décoller et à atterrir à la verticale ainsi que pour la possibilité
de drones. La modélisation détaillée d’un quadricoptère et le de le maintenir dans une position fixe par rapport au sol. Cela
système d’asservissement discret est réalisée pour de petits s’avère primordial dans bien des situations dont l’inspection
appareils [6], [7]. Dans certains cas, une approche non-linéaire de bâtiments où le drone doit demeurer stable pour transmettre
est proposée afin d’obtenir un modèle plus représentatif [8]. une image claire de la structure à partir d’une caméra fixée à
Une approche géométrique pour le contrôle de trajectoire la plateforme.
utilisant le groupe euclidien spécial SO(3) semble prometteuse L’objectif principal du projet est présentement de concevoir
en simulation pour améliorer les techniques actuelles et devra un premier prototype pouvant y parvenir en tenant compte
être validée sur un prototype réel [9], [10]. Enfin, le consortium des contraintes décrites dans la section précédente. Cela im-
européen sFly (Swarm of Micro Flying Robots) concentre ses plique le développement de différents éléments mécaniques,
activités de recherche sur les techniques de SLAM (Simulta- électriques, électroniques et informatiques. Le drone doit être
neous Localization And Mapping) à des fins de cartographie en mesure de communiquer avec un ordinateur au sol, de
ou de navigation ainsi que sur le vol en formation de plusieurs supporter une charge utile d’environ 1 kg et d’atteindre une
drones [11]. autonomie de vol d’environ 20 minutes afin qu’il soit possible
La conception de drones pour des applications réelles à de s’en servir dans un cas réel.
portée sociale, i.e. dans le but de porter assistance au travail L’intégration de ces multiples sous-systèmes sur une même
humain, demeure difficile avec les plateformes proposées ci- plateforme nécessite la mise en place d’un mécanisme qui soit
haut. En effet, dans ce type d’applications, l’environnement capable de les mettre en relation les uns avec les autres de
devient dynamique et variable, et ses paramètres ne sont façon cohérente et efficace. L’architecture décisionnelle et de
plus contrôlés par l’expérimentateur. Tout peut arriver à tout contrôle du drone répond à cette exigence. Pour réussir, elle
moment sans que cela soit prévu. Cela rend la téléopération doit être suffisamment flexible et modulaire afin de permettre
beaucoup plus difficile et nécessite une bonne expérience de une meilleure répartition des tâches à accomplir par le drone
pilotage. De plus, les futurs utilisateurs de drones n’auront pas en fonction du temps de réaction requis pour les réaliser. Par
forcément de connaissances suffisantes sur le fonctionnement exemple, le calcul d’une nouvelle trajectoire peut être très lent,
technique de l’appareil. Cela pourrait les amener à négliger mais l’évitement d’obstacles doit se faire dans des délais très
des facteurs importants lors de la téléopération du drone et courts. Cette modularité est aussi nécessaire pour assurer un
ainsi causer des dommages matériels non négligeables à la bon suivi de l’état du système et ainsi détecter toute défaillance
plateforme. Le drone doit donc être en mesure d’effectuer ses en cours de vol.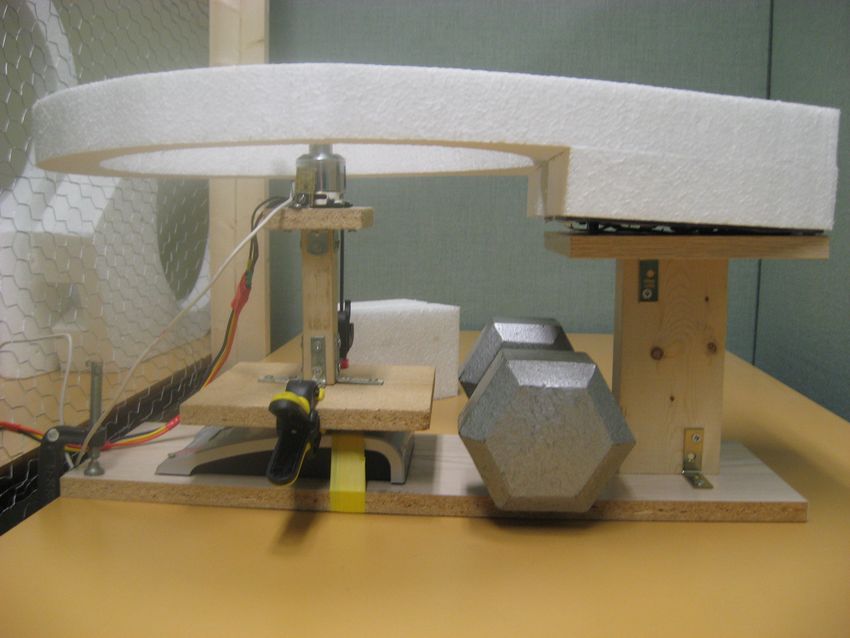
Celle qui est suggérée ici divise le tout en trois niveaux. de sécurité, les batteries ne doivent pas atteindre une tempé-
Une architecture comportementale hybride [12] constitue le rature de 60◦ C. Au-delà de cette température, elles peuvent
niveau supérieur. Un système temps-réel implémentant les s’enflammer ou encore exploser. Le système devra donc être
techniques d’asservissement de [6], [7] et [9] constitue le en mesure de faire un suivi de l’échauffement des batteries.
second niveau et un système de contrôle des moteurs et de Du polyéthylène recouvre les batteries LiPo utilisées ainsi
gestion de l’alimentation forme le niveau le plus réactif au que les hélices afin de prévenir tout contact qui pourrait les
bas de l’architecture. Au final, ce projet permet de valider endommager ou atteindre une personne. Le polyéthylène a
que cette architecture est appropriée pour les besoins d’un l’avantage d’être léger et de reprendre sa forme initiale après
drone autonome et performant pour des application dans un déformation lors d’un contact avec un obstacle ou le sol.
environnement réel et variable et suggérer son utilisation dans
le cas d’applications à portée sociale. B. Architecture globale du système
L’architecture globale du drone qui est proposée ici se divise
IV. D ESCRIPTION DU SYSTÈME en trois niveaux allant des mécanismes réalisant le traitement
A. Systèmes électromécanique le plus long et le plus coûteux en termes de calculs à effectuer
jusqu’aux plus réactifs. La figure 2 illustre cette architecture
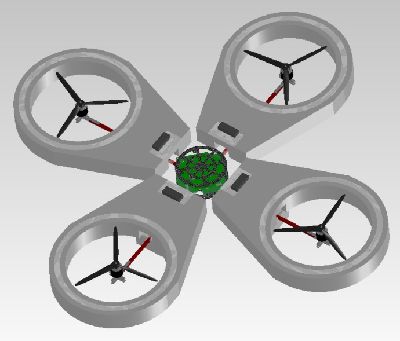
La mécanique du drone est conçue en fonction de deux ob- en y représentant les éléments principaux.
jectifs principaux : maintenir un poids uniforme et léger ainsi
qu’assurer la protection de l’appareil et de son environnement
incluant les gens alentours. La figure 1 provenant d’un modèle
SolidWorks illustre les éléments mécaniques du quadricoptère.
On y remarque que le drone possède quatre hélices à trois
pales. Celles-ci ont 13’ de diamètre. Deux hélices sont conçues
pour tourner dans le sens horaire et deux autres dans le sens
antihoraire. Elles sont fabriquées à partir d’un composé de
nylon et de fibre de verre pour assurer une rigidité maximale.
Elles procurent une poussée de 2 kg à 6000 RPM.
F IGURE 2. Architecture globale du drone
Au plus haut niveau hiérarchique de cette architecture se
trouvent les modules responsables de la prise de décisions du
drone concernant l’accomplissement des tâches à réaliser telles
F IGURE 1. Modèle mécanique que reçues de l’utilisateur via une interface de commandes.
Un planificateur gère les tâches reçues et établit la trajectoire
Les moteurs utilisés pour faire tourner les hélices sont des que le drone doit accomplir pour y parvenir en se basant sur
moteurs à courant continu sans brosse (BLDC). Ils ont une une représentation interne de l’environnement constamment
puissance nominale de 400 W et une puissance crête de 800 mise à jour. Le système exécutif agit comme interface entre
W (ou 1,1 HP). Leur rendement énergétique se situe entre 80% le planificateur et les comportements qui exécutent les tâches.
et 90%. Chaque comportement agit de manière concurrente face aux
Quatre batteries au lithium polymère de cinq cellules de autres et propose une commande à transmettre au système
5800 mAh alimentent chaque moteur. Les cellules sont bran- temps-réel. Un module d’arbitrage établit les priorités entre
chées en série, ce qui permet de fournir une tension nominale les différents comportements et transmet la commande la plus
de 18,5V pour l’ensemble des cinq cellules d’une batterie. prioritaire au second niveau hiérarchique de l’architecture.
Chaque batterie a un poids d’environ 0,7 kg et procure une Le système temps-réel est le second niveau hiérarchique. Il
autonomie d’environ 18 minutes au drone. Pour des questions asservit le drone en fonction des commandes transmises par le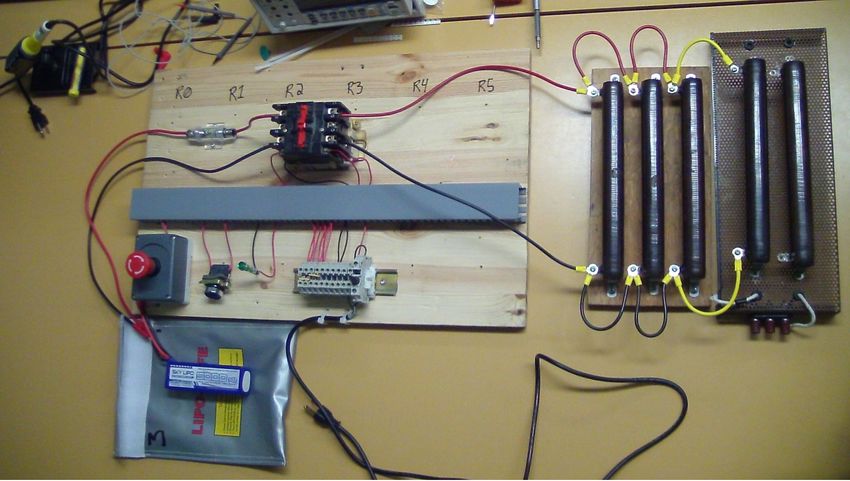
système d’arbitrage et des données mesurées par ses capteurs.
Il fournit la vitesse de rotation des moteurs au plus bas niveau
hiérarchique lui assurant de répondre à la consigne et transmet
l’information de ses capteurs au niveau supérieur. Des codes
d’alertes sont également communiqués entre le système temps-
réel et le système exécutif pour déceler toute anomalie et aider
l’ensemble du drone à réagir rapidement dans un tel cas.
Le système de contrôle des moteurs, au bas de l’architecture,
agit directement sur les actuateurs en asservissant leur vitesse
de rotation en fonction de la consigne reçue du système temps-
réel et transmet au niveau supérieur l’état des moteurs et des
batteries.
Le schéma-bloc de la figure 3 présente l’implémentation
proposée pour ce type d’architecture à trois niveau d’un point
de vue électrique et électronique.
F IGURE 4. Machine à états finis
C. Comportements intelligents et planification de tâches
Un ordinateur embarqué est utilisé pour réaliser le plus haut
niveau de l’architecture. L’électronique de l’appareil est prévue D. Système de contrôle automatique en temps-réel
pour supporter différents modèles sans qu’il soit nécessaire de
modifier le circuit d’alimentation. Cette flexibilité permet au
fil du temps de remplacer un modèle moins récent d’ordinateur Le système temps-réel est composé d’une carte-mère. Sur
par un autre plus performant afin de continuer à développer cette carte se trouve un micro-contrôleur TMS570LS3137 avec
de nouvelles applications. Le modèle utilisé actuellement dans processeur ARM de Texas Instrument offrant la capacité de
le cadre du projet est le fit-PC2-D2G-C1600-W [13]. Il est calcul nécessaire aux tâches temps-réel à réaliser. En effet,
petit et consomme peu d’énergie en plus de comporter les il est conçu et certifié pour l’aéronautique, avec plusieurs
périphériques de base requis : un connecteur Ethernet et sécurités pour ce genre d’applications. D’abord, il fonctionne
quelques connecteurs USB 2.0. en lock-step, c’est-à-dire que deux coeurs effectuent les mêmes
Cet ordinateur gère le traitement de plus haut niveau et la calculs parallèlement. Une logique interne vérifie ensuite que
prise de décisions complexes. Une implémentation en langage la valeur obtenue est identique dans les deux cas, validant
Java sous forme de plugins permet d’ajouter de nouvelles ainsi le résultat du calcul du processeur. Aussi, il offre une
fonctionnalités ou de modifier les algorithmes de vol rapi- puissance de calcul cadencé à 180 MHz, ce qui est en terme
dement. Les comportements qui sont actuellement program- de performances et donne accès à de nombreux ports Ethernet,
més incluent, par ordre de priorité, l’évitement d’obstacles, GIO, I2C, SPI, à plusieurs canaux d’ADC et de PWM. Enfin,
l’atterrissage, le décollage, le maintien de la position et le plusieurs périphériques sont pourvus d’une mémoire avec code
déplacement selon une trajectoire. Chacun de ces comporte- de correction d’erreur afin d’en éviter la corruption. La carte
ments agit de façon concurrente, c’est-à-dire que chacun peut électronique réalisée communique avec les cartes de contrôle
soumettre, en parallèle aux autres, une consigne de vitesse à des moteurs en utilisant un lien RS-485 et vers l’ordinateur
transmettre au système temps-réel. Ainsi, lorsque le drone se embarqué via un lien Ethernet.
déplace entre deux points A et B et rencontre un obstacle face La carte mère comprends les circuits d’interface de plusieurs
à lui, le comportement de déplacement proposera une vitesse capteurs dont un accéléromètres à trois axes, un gyroscope,
linéaire vers B qui soit positive tandis que le comportement une boussole, un altimètre et des capteurs ultrasoniques. Il
d’évitement d’obstacle en proposera une autre négative dans s’agit d’une centrale inertielle qui sert à la stabilisation de la
cet axe et une positive perpendiculairement à l’axe AB. position du drone et de sa vitesse linéaire ou angulaire. La
Certains comportements agissent de manière séquentielle en technique d’asservissement utilisée est basée sur les travaux
fonction de la trajectoire de vol à accomplir. Ils peuvent être de [6], [7] et [9].
activés ou désactivés par le système exécutif afin d’accomplir
la tâche désirée par le planificateur. Ceci est résumé dans la La figure 6 illustre les référentiels inertiel i et non-inertiel
machine à états finis de la figure 4. b ainsi que la force de poussée fi engendrée par chaque
propulseur. On y remarque que les forces fi sont dirigées dans
On remarque sur le diagramme qu’il est impossible pour →
−
le drone de se déplacer entre deux points A et B sans le sens opposé à l’axe bz . La force résultante f est la somme
avoir préalablement complété son décollage et avoir atteint des quatre forces engendrées par les propulseurs.
une hauteur minimale. En tout temps, une alerte peut être La force résultante f et le moment résultant dans chaque
déclenchée et provoquer l’atterrissage du drone. L’atterrissage axe Mi sont ainsi obtenus à l’aide de l’équation suivante qui
mène à la réinitialisation de la séquence. les exprime en fonction des forces de poussée fi :
F IGURE 3. Schéma global du drone
0 0
mv̇ = mg 0 − f R 0 (4)
1 1
Ṙ = RΩ̂ (5)
J Ω̇ + Ω × JΩ = M (6)
où x est la position du drone dans dans le référentiel inertiel i
et v est sa vitesse linéaire dans ce même référentiel. m est la
masse du drone et g est l’accélération gravitationnelle terrestre.
R est la matrice de rotation qui relie le référentiel inertiel au
référentiel non-inertiel tandis que J et Ω sont respectivement
les matrices d’inertie et de la vitesse angulaire du drone dans
le référentiel non-inertiel. Ω̂ représente la transformation de Ω
une matrice antisymétrique :
F IGURE 5. Carte-mère 0 −Ωx Ωy
Ω̂ = Ωz 0 −Ωx (7)
−Ωy Ωx 0
Ainsi, à partir de la vitesse linéaire désirée, il est possible
de déduire la force de poussée de chaque hélice tel qu’illustré
par l’équation suivante qui relie fi à la vitesse de rotation d’un
moteur ωi :
fi = Bωi2 (8)
En se basant sur des courbes de calibration, il est ensuite
possible d’associer chaque force de poussée à une vitesse de
rotation de l’hélice (RPM). Cette valeur est transmise comme
consigne à une carte électronique qui asservit le moteur de
l’hélice. Ce principe de fonctionnement est répété pour les
quatre moteurs.
F IGURE 6. Modélisation du drone
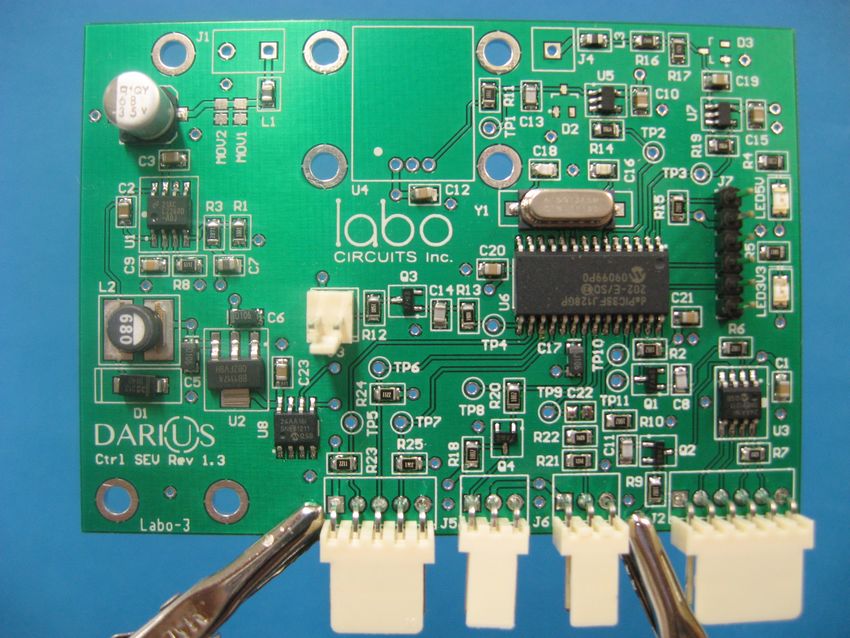
E. Système de contrôle des moteurs
Le système de contrôle des moteurs est composé de quatre
f
1
1 1 1
f1 cartes électroniques asservissant la vitesse de rotation de cha-
Mx 0 −d 0 d f2 cun des moteurs tel qu’illustré à la figure 7. Chaque carte élec-
= (1) tronique comprend un micro-contrôleur dsPIC33FJ128GP202
My d 0 −d 0 f3
Mz −cτ f cτ f −cτ f cτ f f4 de Microchip utilisé pour l’acquisition, la transmission et le
traitement des données gérées à ce niveau de l’architecture.
→
−→ −
où d est la distance entre le centre de masse sur le plan bx by La figure 8 illustre l’implémentation matérielle finale.
et cτ f est une constante qui se déduit de la densité de l’air ρ, Un optocoupleur mesure les transitions entre des bandes
du rayon de l’hélice r : blanches et noires sur la partie mobile du moteur. Ainsi,
le micro-contrôleur est en mesure de calculer le nombre
B de rotations effectuées en une minute. Cette rétroaction du
cτ f = (2)
ρπr4 système permet de fermer la boucle d’asservissement du drone
réalisée à l’aide d’un module PID conventionnel dont les
où B est le coefficient de proportionnalité entre qui relie la coefficients sont donnés ci-dessous :
vitesse angulaire ωi à la poussée fi .
Il est donc possible de déterminer les forces fi en four- Kp = 2, 8 (9)
nissant en entrée du système la force f et les moments Mi
regroupés dans une seule matrice M . Les équations de la Ki = 3, 0 (10)
dynamique du drone qui complètent le modèle physique sont Kd = 0, 1 (11)
données ci-dessous :
Le bon fonctionnement du drone dépend aussi de son
ẋ = v (3) alimentation en énergie. L’état des batteries est donc suivi avec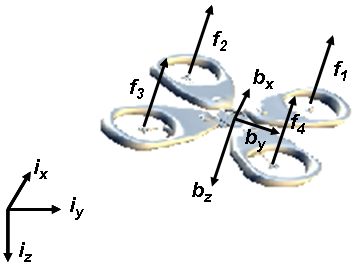
A. Banc d’essais électrotechnique
Un banc d’essais permet de mesurer les caractéristiques des
moteurs, des hélices et des batteries. Une carte de contrôle de
moteur est utilisée pour les tests et est reliée à un ordinateur sur
lequel a été réalisé une interface graphique à l’aide du langage
LabView. Cette interface simule le comportement de la carte-
mère. Il est ainsi possible d’accéder aux données des capteurs
de la carte de contrôle du moteur ou encore de modifier sa
consigne de vitesse RPM et les paramètres du compensateur
PID. Différents tests sont réalisés à partir de ce montage.
Le premier concerne la force de poussée d’une hélice. La
courbe de calibration de la poussée d’une hélice est réalisée
à l’aide du montage illustré à la figure 9. Le moteur couplé à
l’hélice repose sur un socle fixé sur le dessus d’une balance.
La cage de polyéthylène entoure l’hélice. Une fois en rotation
celle-ci engendre une force qui tire sur la balance et qui peut
être mesurée. En appliquant une vitesse de rotation de l’hélice
F IGURE 7. Système de contrôle des moteurs croissante, il est possible d’obtenir la courbe de calibration
requise et d’en extraire le coefficient de proportionnalité B
dans l’équation 8. Ceci vise aussi à comparer les résultats
obtenus avec la courbe théorique du fournisseur pour s’assurer
de la validité des caractéristiques de l’hélice.
F IGURE 8. Carte de contrôle d’un moteur
précision grâce à différents capteurs. Un capteur de courant à
effet Hall permet de mesurer le courant débité par la batterie
et sa tension est mesurée directement par le micro-contrôleur. F IGURE 9. Banc de test de la force de poussée d’une hélice en fonction de
Ainsi, tout problème d’alimentation peut être identifié et sa vitesse de rotation
provoquer un signal d’alerte vers les niveaux supérieurs de
l’architecture, menant du même coup à l’atterrissage immédiat Un test de décharge des batteries est également réalisé afin
de l’appareil. De la même manière, un capteur de température de tracer leur courbe de décharge ainsi que d’évaluer la durée
mesure l’échauffement de la batterie et peut engendrer un autre d’utilisation pour un courant fixe d’environ 15A (requise pour
signal d’alerte similaire en cas de température mesurée trop le décollage du drone). Une mesure de l’échauffement des
élevée. La température critique étant de 60◦ C, une marge de batteries vient aussi quantifier la variation de température et
sécurité est définie en deçà de cette valeur. la température maximale atteignable par une batterie dans les
conditions d’opération à air ambiant (22◦ ). Le montage utilisé
est illustré à la figure 10.
V. M ÉTHODOLOGIE
B. Asservissement et contrôle autonome
L’intégration des différents éléments du système décrit dans L’asservissement du drone est d’abord validé sur Matlab à
la section précédente implique de nombreux tests qui servent partir des graphiques de stabilisation de l’attitude du drone
à obtenir des valeurs de calibration ou encore à démontrer les dans chacun des angles de roulis, tangage et lacet. L’im-
performances du système dans des situations particulières. plémentation d’un simulateur sur Matlab est inspirée desF IGURE 10. Banc de test de la décharge de la batterie
F IGURE 12. Courbes de calibration des hélices expérimentale (rouge) et
théorique (bleue)
travaux de [6]. Un autre simulateur illustré à la figure 11
est développé parallèlement afin de valider les performances
du système temps-réel en entier en recréant un drone virtuel
dans un environnement où il est confronté à des obstacles optimal, la force de poussée est en partie annulée, réduisant les
variés et contrôlé entièrement par la carte-mère développée. performances présentées à la figure 12. La masse du socle qui
L’ordinateur embarqué peut aussi être relié à la carte-mère repose sur la balance et auquel est fixé le moteur peut aussi être
afin de simuler le comportement du drone et ses logiques de un paramètre non-négligeable. En effet, une masse trop faible
vol. La figure 11 offre un aperçu de ce simulateur. pourrait être soulevée par l’hélice et la mesure deviendrait
alors inexacte.
Malgré tout, les tests effectués avec la plateforme complète
ont permis d’observer le décollage de la plateforme à 5628,6
RPM, ce qui est très près de la courbe théorique. Cette
dernière peut donc être utilisée par le système temps-réel pour
transmettre les bonnes consignes aux cartes de contrôle des
moteurs.
B. Décharge des batteries
Les batteries choisies permettent d’obtenir l’autonomie
désirée et la température qu’elles atteignent à température
ambiante est acceptable comme le montrent le tableau I et
la figure 13.
F IGURE 11. Simulateur de vol
Autonomie 18 min
Enfin, des tests sont réalisés à partir du drone assemblé dans Variation de température 17 ◦C
Température maximale 37 ◦C
le but de valider ses performances globales. Le premier de ces
tests vise à vérifier si l’appareil est en mesure de quitter le sol
TABLE I
et de supporter son propre poids. R ÉSULTATS DU TEST DE DÉCHARGE
VI. R ÉSULTATS
A. Force de poussée La température maximale atteinte étant donc de 37◦ C, une
La courbe de calibration obtenue expérimentalement à l’aide marge de 23◦ C est disponible pour fixer une température limite
du banc d’essais est présentée à la figure 12 avec la courbe sous 60◦ C avant d’exiger l’atterrissage d’urgence du drone.
théorique du fournisseur. Toutefois, étant donné que les batteries au lithium polymère
La courbe expérimentale a la même allure que la courbe ont une inertie thermique qui leur permet de continuer à
théorique, mais n’y est pas superposée. Étant donné le poids chauffer même si le circuit est ouvert, il est préférable de
de 7,1 kg du drone, chaque hélice doit être en mesure de fixer la limite à 50◦ C. La marge n’est donc en réalité que de
soulever 1775 g. Ceci représente une vitesse de rotation de 13◦ C. Lors du test de décollage de la plateforme, celle-ci a
5900 RPM selon la courbe expérimentale et de 5700 sur atteint une température nominale de 33,8◦ C et une température
la courbe théorique. Cette différence peut s’expliquer par la maximale de 37,5◦ C. Le courant nominal débité par la batterie
géométrie du banc d’essais. Son aérodynamisme n’étant pas était de 15,5 A et le courant maximal de 16,6 A.F IGURE 13. Température de la batterie lors du test de décharge
C. Asservissement du drone
Un test a été réalisé en simulation afin de maintenir le drone
stable dans sa trajectoire. Celle-ci est générée dans MatLab
afin de remplacer l’architecture comportementale hybride de
l’ordinateur embarqué le temps des simulations. Dans le cas
présenté ci-dessous, une consigne de vitesse est déduite de la
trajectoire à suivre selon l’axe X et le drone identifie qu’il
doit effectuer une rotation de 1,5 rad autour de l’axe Y pour
incliner ces hélices de manière à concentrer sa poussée dans la
bonne direction. La figure 14 montre les résultats atteints par
l’algorithme d’asservissement. Le système asservit le tangage
en 0,89 s. Avec une consigne nulle, le roulis et le lacet se
stabilisent rapidement et ont une erreur négligeable.
D. Asservissement de la vitesse de rotation des moteurs
L’asservissement de la vitesse de rotation des moteurs
pour une consigne de 1000 RPM avec les coefficients du
compensateur PID fournis aux équations 9 à 11 donne les F IGURE 14. Consignes sous forme d’angles d’Euler (rouge) et réponses du
résultats présentés au tableau II. système asservi (bleu) en fonction du temps
Consigne de vitesse 1000 RPM
Temps de montée 1,0 s
Temps de stabilisation à 2% 2,8 s
Dépassement maximal 0,0 %
Erreur 0,1 % résultats actuels montrent que les choix techniques faits jus-
qu’à maintenant sont appropriés pour le type d’applications à
TABLE II portée sociale visé. Entre autres, la plateforme réussi à décoller
R ÉSULTATS DU TEST DE CHANGEMENT DE CONSIGNE
malgré un poids élevé de 7,1 kg nécessaire en raison des
batteries qui ont une durée d’utilisation de 18 minutes. Ainsi,
il sera possible d’utiliser la plateforme pour des opérations de
Le temps de montée lent s’explique par le fait qu’il s’agit
moyenne durée tel que l’inspection de bâtiments ou encore la
d’une variation de la consigne de 0 à 1000 RPM. En pratique,
recherche de personnes disparues en forêt.
la variation sera beaucoup plus faible et progressive ce qui
rend ces résultats acceptables. Les résultats obtenus jusqu’à présent sont encourageants et
suggèrent que le modèle d’architecture proposé est approprié
VII. C ONCLUSION
pour le type d’applications souhaitées. Le système de contrôle
En somme, le projet DARIUS a pour but la conception et la des moteurs fonctionne tel que désiré. L’asservissement est
réalisation à faible coût d’un drone de type quadricoptère com- fonctionnel au niveau de la propulsion, mais l’asservissement
plètement autonome qui servira de plateforme de recherche en vitesse n’a pas pu être testé sur le prototype. Le travail reste
aux projets futurs du Département de Génie électrique et aussi à compléter au niveau de l’intégration pour permettre des
de Génie informatique de l’Université de Sherbrooke. Les tests systèmes complets dans des situations réelles.VIII. T RAVAUX FUTURS
Les travaux futurs porteront d’abord sur la complétion de
l’intégration des éléments logiciels sur la plateforme et pour
communiquer avec elle via une interface de téléopération
utilisant le réseau 3G. Il sera ensuite possible de valider
le système en simulant une application réelle. Des études
cliniques de téléopération seront réalisées pour vérifier que
l’interface utilisateur est intuitive et efficace et que le système
décisionnel et de contrôle facilite le travail du téléopérateur.
Au niveau électronique il est envisagé d’intégrer à même
les cartes électroniques de contrôle des moteurs les systèmes
d’entraînement variables et les capteurs plutôt que d’utiliser
des modules externes. Cela permettra de minimiser l’espace
requis sur le drone pour les pièces électroniques ainsi que
d’avoir un meilleur contrôle sur les performances globales.
De la même façon, une version plus compacte et intégrant
tous les capteurs de la centrale inertielle à même le circuit
imprimée est prévue pour la carte-mère.
R EMERCIEMENTS
Les auteurs voudraient remercier l’Université de Sherbrooke
ainsi que les commanditaires sans qui le projet aurait été
impossible : Altium, Labo Circuit, Polymos, Texas Instrument
et Vidéotron.
R ÉFÉRENCES
[1] N. Calderon, M. Chevalier, E. Côté, S. Gilbert, S. Jobin, L. Lebel,
M. Lévesque, D. Rancourt, J. Roy, S. St-André et al., “Vamudes
technical paper.”
[2] H. Bin and A. Justice, “The design of an unmanned aerial vehicle based
on the ardupilot,” Indian Journal of Science and Technology, vol. 2,
no. 4, pp. 12–15, 2009.
[3] D. Mellis, M. Banzi, D. Cuartielles, and T. Igoe, “Arduino : An open
electronic prototyping platform,” in Proc. CHI, vol. 2007, 2007.
[4] G. Hoffmann, D. Rajnarayan, S. Waslander, D. Dostal, J. Jang, and
C. Tomlin, “The stanford testbed of autonomous rotorcraft for multi
agent control (starmac),” in Digital Avionics Systems Conference, 2004.
DASC 04. The 23rd, vol. 2. IEEE, 2004, pp. 12–E.
[5] H. Huang, G. Hoffmann, S. Waslander, and C. Tomlin, “Aerodynamics
and control of autonomous quadrotor helicopters in aggressive maneuve-
ring,” in Robotics and Automation, 2009. ICRA’09. IEEE International
Conference on. IEEE, 2009, pp. 3277–3282.
[6] S. Bouabdallah, “Design and control of quadrotors with application to
autonomous flying,” Lausanne Polytechnic University, 2007.
[7] S. Bouabdallah and R. Siegwart, “Full control of a quadrotor,” in
Intelligent robots and systems, 2007. IROS 2007. IEEE/RSJ international
conference on. IEEE, 2007, pp. 153–158.
[8] J. Escareno, S. Salazar-Cruz, and R. Lozano, “Embedded control of a
four-rotor uav,” in American Control Conference, 2006. IEEE, 2006,
pp. 6–pp.
[9] T. Lee, M. Leoky, and N. McClamroch, “Geometric tracking control of
a quadrotor uav on se (3),” in Decision and Control (CDC), 2010 49th
IEEE Conference on. IEEE, 2010, pp. 5420–5425.
[10] T. Lee, “Geometric tracking control of the attitude dynamics of a rigid
body on so (3),” in American Control Conference (ACC), 2011. IEEE,
2011, pp. 1200–1205.
[11] F. Conte and A. Martinelli, “A hybrid filtering and maximum likelihood
approach to slam,” in Robotics and Biomimetics (ROBIO), 2010 IEEE
International Conference on. IEEE, 2010, pp. 803–809.
[12] F. Michaud, F. Ferland, D. Létourneau, M. Legault, and M. Lauria,
“Toward autonomous, compliant, omnidirectional humanoid robots for
natural interaction in real-life settings,” Paladyn. Journal of Behavioral
Robotics, vol. 1, no. 1, pp. 57–65, 2010.
[13] [Online]. Available : http://www.fit-pc.com/web/fit-pc/fit-pc2-i/Vous pouvez aussi lire