LE MOTEUR À COURANT CONTINU - Projet de Physique P6 STPI/P6 /2017-033 - Moodle INSA Rouen
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Projet de Physique P6
STPI / P6 / 2017 - 033
LE MOTEUR À COURANT CONTINU
Étudiants :
Craste Antonin
Khatchadourian Pierre
Dias Rodrigue
Cuvilliez Louis
Enseignant responsable :
Monsieur Guillotin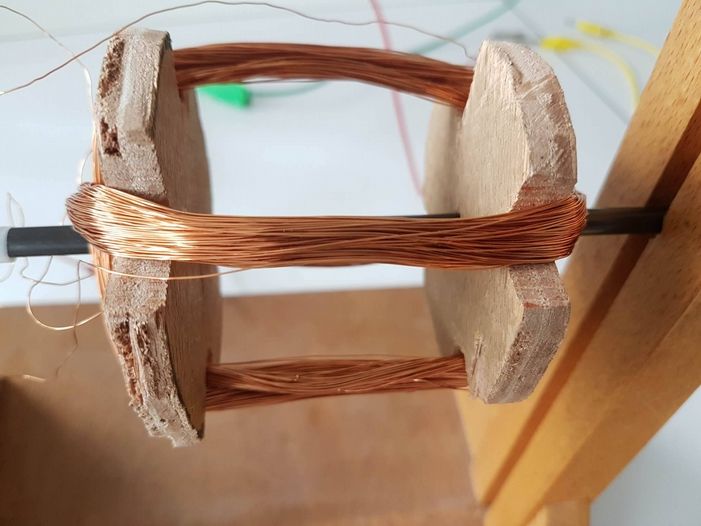
2
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033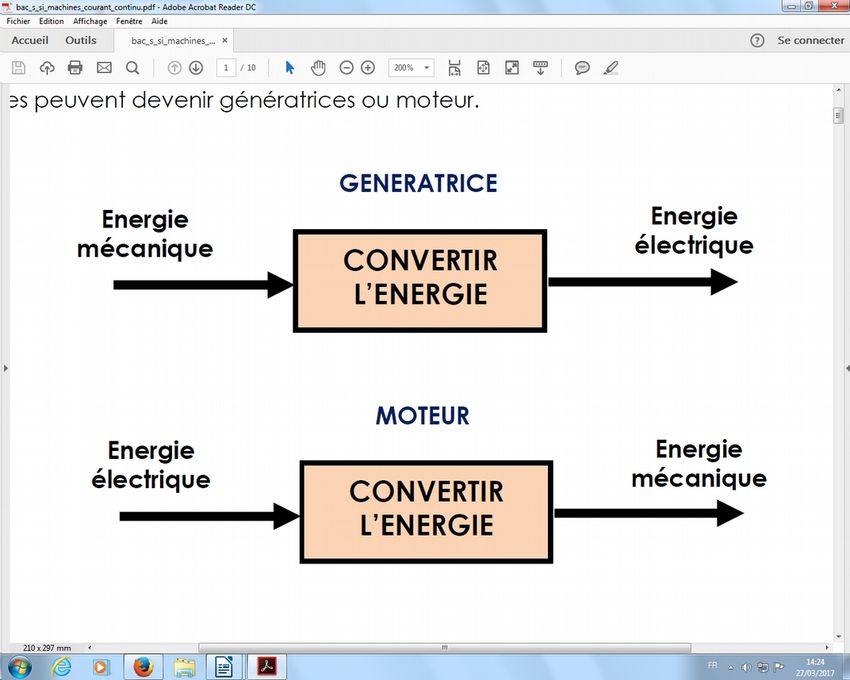
3
Date de remise du rapport :
Référence du projet : STPI / P6 / 2017 - 033
Intitulé du projet : Le moteur à courant continu
Type de projet : Expérimental
Objectifs du projet :
L’objectif de ce projet est de réaliser entièrement un moteur à courant continu. A
terme nous voulions vérifier à l’aide d’expériences les relations que nous avons pu voir
en cours de P5 et les différentes lois censées s’appliquer au moteur.
Mot-clefs du projet : Moteur, Conversion électromécaniques, Laplace
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033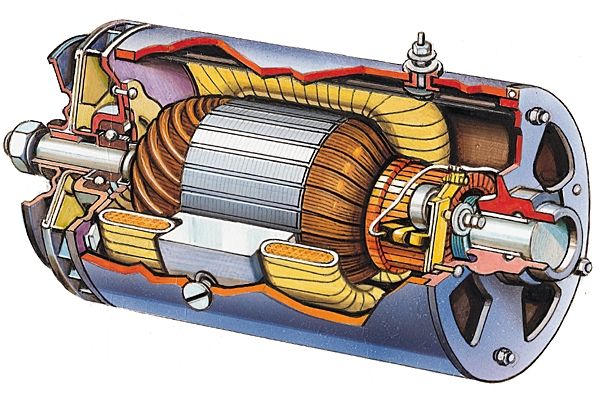
4
TABLE DES MATIÈRES
Introduction…………………....………………………………………………………...…...….5
Organisation du travail…………………………………………………………………........…6
Travail réalisé et résultats…………………………………………………………….....….....7
I - Partie theorique……………………………………………………………..…….....7
1) Les moteurs à courant continu…………………………....…...…………..8
2) La force de Laplace........... ………………………….………………….....8
3) Principe et fonctionnement……………………………….…………...…....8
4) Bilan de puissance………………………………………....……………...13
5) Principe de réversibilité……………………………………………….…...13
6) Les différents types de moteur à courant continu…………...…….…...14
A) Le moteur à excitation parallèle (ou shunt)....................................14
B) Le moteur à excitation en série......................................................15
C) Le moteur à excitation séparée......................................................16
D) Le moteur à aimants permanents..................................................17
II - Partie pratique…………………………………………………………………......18
A) Recherche des pièces du moteur……………………………………......18
B) Construction du bâti…………………………………………………..…...18
C) Bobinage…………………………………………………………………....19
D) Commutateurs.....................................................................................19
E) Tests du moteur....................................................................................20
F) Pistes d'amélioration............................................................................20
Conclusion……………………………………………………………………………………..21
Bibliographie……………………………………………………………………………….......22
Annexe………………………………………………………………………………………....22
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033
5
INTRODUCTION
Le projet P6 est un premier aperçu du métier d’ingénieur, en effet, il nous
permet enfin de mettre en lien nos connaissances théoriques avec la pratique. Les
connaissances acquises en STPI nous semblent d’un coup bien plus utiles. De plus, le
sujet du projet regroupe documentation et pratique, en effet, nous avons dû nous
informer sur les différents types de moteurs existant mais aussi apprendre à travailler le
bois ou encore organiser notre espace de travail pour être en sécurité, c’est en partie
pour cela que nous nous sommes tournés vers celui-ci. De plus, les moteurs sont des
éléments essentiels à de nombreux mécanismes, la possibilité de mieux les
comprendre nous a beaucoup motivé.
Nous avons découvert toute la procédure de création d’un produit.
Effectivement, nous avons dû effectuer des recherches, imaginer une solution au
problème posé, se mettre d’accord sur le produit, s’organiser pour être le plus productif
possible ou encore faire savoir l’avancement à notre encadrant. C’est le premier projet
où nous sommes autant à travailler sur un même sujet. L’organisation fut donc
compliquée, en effet, trouver du temps où nous sommes tous disponibles est difficile.
De plus, il faut se communiquer les informations de la manière la plus simple et claire
possible.
Enfin, ce travail nous a permit de mieux nous rendre compte d’un domaine du
département Méca ou EP, ce qui est un grand atout dans le choix de nos futures
années.
Le rapport se décompose en plusieurs parties. Tout d’abord, nous aborderons
l’organisation du travail. La partie théorique visant à compléter nos cours de l’INSA
vient ensuite. Une partie technologique sera alors abordé où différents types de
moteurs seront expliqués. Enfin, le rapport se conclut par la partie pratique où les
différentes étapes de la construction du moteur seront exposées.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033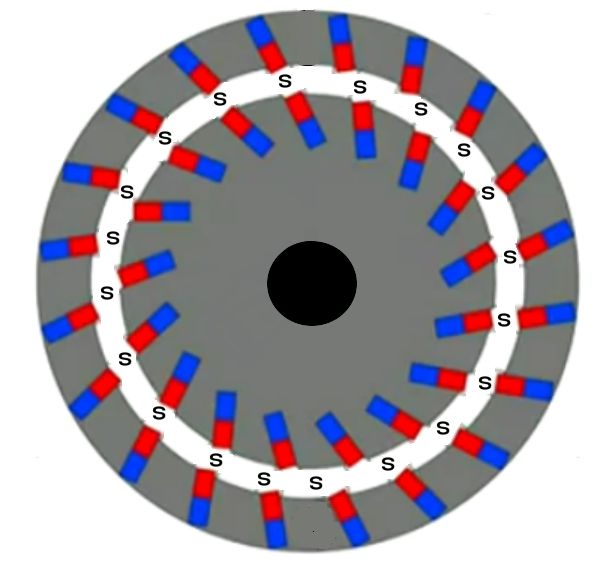
6
Méthodologie/Organisation du travail
Lors des premières séances du projet, nous avons chacun effectué des
recherches sur les différents types de moteurs à courant continu. Nous nous sommes
alors ensuite réunis pour discuter des connaissances acquises. La réflexion sur la
construction d’un moteur commença. Petit à petit, nous avons réussi à dessiner
quelques schémas de moteurs qui nous paraissaient corrects.
Certaines idées concernant sa construction nous sont venues d’internet, mais
aussi du cours de P5 suivi au semestre 3. En effet, la compréhension des champs
électriques ou magnétiques est primordiale afin d’appréhender un moteur à courant
continu.
Une fois le schéma final du moteur fini, nous nous sommes répartis en deux
groupes. Deux personnes ont travaillé sur la partie pratique du projet pendant que les
deux autres se sont concentrées sur l’aspect documentaire. La coordination entre les
deux groupes fut nécessaire. En effet, le groupe axé sur la pratique se devait de
comprendre et d'assimiler les phénomènes au même titre que l’autre groupe, afin de ne
commettre aucune erreur lors de la conception du moteur. L’autre groupe quant à lui, se
devait également de garder un oeil sur l’aspect pratique, afin de corriger une erreur si
besoin est ou d’affiner leur compréhension du phénomène.
La construction du moteur fut possible grâce à l’aide des techniciens présents à
l’INSA ainsi qu’au professeur. En effet, notre faible expérience sur le travail du bois ou
des métaux a rendu le travail plus long.
Le travail documentaire fut tout aussi difficile, en effet, l’abondance des
informations sur la partie théorique a obligé l’équipe à faire du tri. En effet, il fallait
sélectionner les informations les plus pertinentes et les expliquer le plus simplement
possible.
Cependant, nous n’avons pas scindé le groupe en 2 tout au long du projet, en
effet, lors de la commande de matériel ou lors des étapes clés de la construction du
moteur, nous nous sommes réunis pour prendre les décisions les plus justes possibles.
De plus, un document Google Drive fut créé afin que tous puissent suivre l’avancement
du projet ou encore travailler depuis chez soi. La création de ce Drive fut très utile pour
l’écriture du rapport car il permettait à tous les membres de travailler en même temps et
sur un même support, le rapport, ainsi que de suivre l'évolution faite par chacun.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033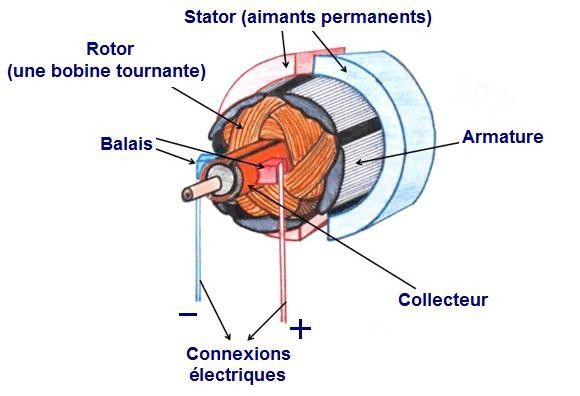
7
TRAVAIL RÉALISÉ ET RÉSULTATS
I - Partie theorique
1) Les moteurs à courant continu
Les machines à courant continu sont des membres de la famille des actionneurs.
Les actionneurs sont des éléments qui produisent une action. Il existe ainsi deux
types d'actionneurs, d'un côté nous trouvons les génératrices qui transforment l'énergie
mécanique en énergie électrique créant un courant continu. Mais les machines
continues sont également réversibles, on obtient alors notre second type de machine
continue, les moteurs. Les moteurs à courant continu sont ainsi des machines à
courant continu transformant dès lors l'énergie électrique en énergie mécanique créant
une rotation.
Ainsi moteur et génératrice sont une seule et même machine, laquelle est
réversible par construction. La loi d'Ohm s'écrit donc selon deux conventions :
-Convention récepteur (moteur) : U =E+ RI
-Convention générateur(génératrice) : U =E – RI
Notons que E est la fcem (force contre Électromotrice) du moteur ou fem ( force
électromotrice) de la génératrice , R est la résistance interne , U la tension au borne du
moteur ou de la génératrice et I est l'intensité.
Nous remarquons assez facilement, qu’un banal changement de signe permet
de passer de l 'une à l'autre. Selon que I est consommé par la machine ou fourni à
l’extérieur, la machine à courant continu agira comme un moteur ou bien comme une
génératrice.
Les moteurs à courant continu sont généralement employés dans des domaines
spécifiques. Par exemple , nous les retrouvons dans les domaines de la traction, du
levage et du positionnement pour les fortes puissances. Mais il est également
envisageable d'employer ce dernier lorsqu'un système utilise une source d'énergie
autonome (pile ou batterie).
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033
8
2) La force de Laplace
Soit un matériau conducteur, comportant des charges mobiles de vitesse v par
rapport à un référentiel R' (lié au conducteur) et de masse volumique ρ . Ce conducteur
est soumis a un champs magnétique B permanent et orthogonal à v . Il met alors en
œuvre l'effet Hall.
On a création d'un champs électrostatique :
E=− v ∧ B , appelé champs de Hall.
Le mouvement global des porteurs de charge est toujours dans la direction de v .
Le champs agit sur les charges fixes. Ainsi, la force élémentaire s'appliquant sur un
élément de volume dτ du conducteur s'écrit donc : dF =(ρ v ∧B)dT
avec ρv ᴧ B la densité volumique de force magnétique.
On en déduit dF =( j∧ B) dt où j=ρv est la densité volumique du courant
Ici le conducteur est filiforme. S'il est parcouru par un courant électrique I,l'élément de
courant équivalent à j dT est I dl, dl étant colinéaire au conducteur. Si cet élément de
courant baigne dans le champs B, Il est alors soumis à la force de Laplace
d'expression: dF =ldl∧B
3) Principe de fonctionnement
Le moteur à courant continu se compose de deux parties distinctes :
- La première est la partie fixe : l'inducteur (ou également appelée le stator)
- La seconde est la partie tournante : l'induit (ou aussi appelée le rotor)
Le rotor est un cylindre de fer feuilleté où ont été usinées des encoches en
périphérie. Ce circuit correspond également au circuit de puissance car le couple de la
machine est proportionnel au courant I. Par conséquent, notons que la puissance
maximale est limitée par le courant maximum que l'on est capable de faire passer du
rotor tournant vers l’extérieur (pour une génératrice).
Le stator quant à lui, comporte deux pièces polaires opposées enveloppant
chacune le rotor d'un angle de 90°. C'est grâce à des aimants permanents ou des
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033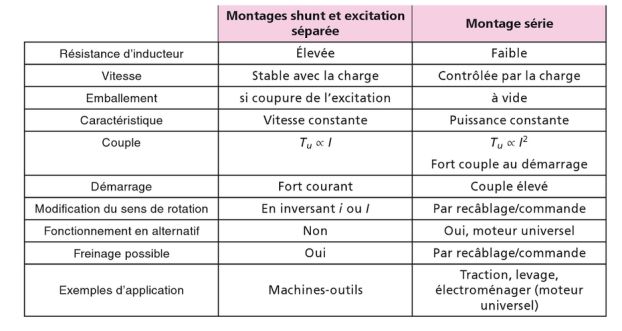
9
inducteurs que les pièces polaires deviennent des pôles N et S fixes. Alors, les lignes
d'inductions engendrées se referment à travers le rotor entraînant sa rotation.
Remarquons néanmoins , que ces lignes d'induction éprouvent énormément de
difficultés à traverser les quelques millimètres séparant le stator et le rotor.
Considérons que le conducteur est placé sur le rotor qui tourne. Nous faisons
circuler un courant I dans un champ électrique. Le conducteur va alors couper les
lignes de champ magnétique B lors de la rotation du rotor. Il va dès lors être le siège
d'une force électromotrice (f.é.m) dont le sens de circulation est donné par la règle de
la main droite (ou règle des 3 doigts de la main gauche). C'est le principe de la force de
Laplace qui va alors mettre en mouvement une partie du circuit. Ce principe est utilisé
par exemple pour les moteurs électriques de voitures ou autres moyens de transport
motorisés.
Désormais considérons la spire comme étant fermée par deux conducteurs
diamétralement opposés. On fait tourner le moteur. On donne ainsi une énergie
mécanique au système. Il apparaît alors dans le moteur un champ électromoteur
d'induction. Les deux forces électromotrices s'ajoutent et nous pouvons alors fermer le
circuit. Nous réalisons ainsi un générateur de courant.
Ce principe de fonctionnement est utilisé dans la réalisation d'une lampe
dynamo. C'est le même fonctionnement pour recharger une batterie de téléphone.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03310
L’inversion de sens de courant:
Si nous prenons pour exemple le cas d’un dispositif à une seule spire et d’un
collecteur à deux lames simples.
Notons que les balais sont solidaires du bâti tandis que les lames du collecteur
tournent en même temps que le rotor.
Au passage de la ligne neutre les lames du collecteur auxquelles sont attachées
les extrémités de la spire changent de balai ce qui implique un courant dans la spire qui
s’inverse. Ainsi nous remarquons que le couple des forces de Laplace garde alors un
signe identique. En effet, si le courant ne s’inversait pas alors le des forces de Laplace
changerait et le moteur ne tournerait pas. Notons également que l’ensemble collecteurs
plus balais (représentaient dans notre projet par les fils fixés par les mains) joue le rôle
de commutateur.
L’inversion du sens de courant est primordiale pour le bon fonctionnement du
moteur à courant continu. En effet, si ce phénomène est négligé, le moteur se lance
mais n’effectue qu’un demi tour avant de s'arrêter net dans une certaine position
d’équilibre. Cela correspond à lorsques les lames de cuivre changent de balais.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03311
Valeur de la f.é.m :
La valeur de la f.é.m induite est donnée par la relation d'électrotechnique. La
force électromotrice E est la tension produite par notre rotor lors de sa rotation dans le
flux magnétique produit par la partie fixe de la machine, c'est à dire le stator. Elle
dépend entre autre des éléments de constitution de la machine.
La relation est : E=(ρ/a )∗N∗n∗φ
Avec :
p : nombre de paire de pôles du rotor
N : nombre de conducteurs du rotor
a : nombre de paire de voies d'enroulement
n : fréquence de rotation (en tr/s)
φ : flux en Webers (Wb)
Contrôle de la vitesse du moteur :
La loi d'Ohm pour un circuit rotorique s'ecrit U =E+ RI + eB .
Si le moteur est à vide , alors nous remarquons que l 'expression devient
U =E=nN φ car I est absorbé.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03312
La vitesse n est alors proportionnel à la tension U d'alimentation. C'est d'ailleurs
le grand intérêt du moteur à courant continu. Si on inverse U , on peut faire tourner la
machine en arrière. Ainsi la machine possède la possibilité d'avoir deux sens de
rotation.
Le moteur à courant continu est idéal pour la traction électrique (embrayage,
boite de vitesse). En revanche, il faut prendre garde à lui délivrer une alimentation en
tension continu U variable.
Le couple moteur :
Prenons le cas suivant, une spire de longueur l et de diamètre 2R, est
parcourue par un courant I, le tout soumis à un champ magnétique radial. La spire
tourne ainsi autour d’un axe de rotation (ici Uz, voir schéma ci desous) avec une
vitesse de rotation (Oméga).
Qu’en est il de la notion de couple moteur ? Une notion est primordiale pour la
réalisation, d’un moteur à courant continu, c’est celle liant le couple moteur au courant.
En effet le couple est proportionnel à l’intensité du courant parcouru dans
l’enroulement. Le facteur de proportionnalité est le flux (φ).
On obtient que B(R, θ)= B0 si θ (appartient) ]0, π[ et B(R,θ)=-B0 si θ appartient à
]π, 2 π [ et sinon B=0.
C=φ . I avec φ=2. R . I. B0
On néglige les effets de Bore pour B. Et φ est homogène à B0 à travers la
surface de la spire.
Il faut néanmoins prendre soin d’associer à cette relation un schéma de
convention d’orientation.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03313
4) Bilan de puissance
Il ne faut surtout pas oublier de considérer lors de l'étude et la réalisation d'un
moteur ou d'une génératrice à courant continu les pertes occasionnées lors de
l'utilisations de l'appareil. Il convient donc de porter notre intérêt quelques instants sur
l'effet Joule du circuit électrique. En effet sa résistance n'est pas systématiquement
négligeable , et il se peut que cela amène à des modifications conséquentes . Qui plus
est , les frottements , inévitables dans le cas présent puisqu'il s'agit de la mise en
mouvement d'une pièce mécanique par rapport à une autre, peuvent altérer la
puissance mécanique transmise au moteur.
De ce fait, nous obtenons l'équation suivante :
P elec.Ext – P Joule=P laplace= P frottement+ P méca .
Et par conséquent : - Pour un moteur : P méca= P elect.ext−P joule−P frottement
- Pour une génératrice : P elect=P méca.ext−P joule−Pfrottement
5) Principe de réversibilité
Considérons que nous fassions circuler un courant dans une spire, en présence
du flux inducteur, une force agit sur les conducteurs et fait tourner l'induit. On a ainsi
réalisé un moteur à courant continu. Mais maintenant considérons une machine à
courant continu, cette dernière est entraînée quand elle est alimentée par courant
continu de la même manière qu'un moteur. Il n'y a que le sens du phénomène qui
change.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03314
Petit schéma explicatif du
principe de réversibilité
Un moteur est donc une machine qui transforme de l’énergie électrique en
énergie mécanique. Cependant il existe un grand nombre de différents moteurs (moteur
à courant continu, alternatif, pas à pas etc…). Ici, nous nous concentrerons sur les
machines à courant continu, qui comportent : le moteur à excitation parallèle (shunt), le
moteur à excitation en série, le moteur à excitation séparée et le moteur à aimant
permanent.
A) Le moteur à excitation parallèle (ou shunt)
Le moteur à excitation dérivée ou shunt est composé de deux enroulements : un
enroulement autour du stator et un autour du rotor. Ils sont connectés en parallèle et
sont donc parcourus par des courants d’amplitudes différentes. Schéma équivalent :
Ce moteur présente beaucoup d’avantages. Sa vitesse est sensiblement constante et
facile à régler. De plus, il suffit de changer le sens du courant pour changer sa vitesse
de rotation. Ses utilisations sont diverses : machines outils, appareils de lavage,
pompes, ventilateurs, etc…
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03315
Voici quelques unes de ses plus importantes propriétés :
-circuit inducteur et induit, alimenté sous la même tension
-proportionnalité entre fem et vitesse de rotation
-si U augmente, la vitesse augmente
-ne jamais couper le courant dans l’induit sinon le moteur s’emballe, en effet la vitesse
du moteur est inversement proportionnelle à la tension dans le circuit induit.
B) Le moteur à excitation en série
Ce type de moteur est caractérisé par le fait que le stator (inducteur) est raccordé en
série avec le rotor (induit), ainsi la même tension traverse le stator et le rotor. Par
conséquent, le sens de rotation ne change pas avec le sens du courant; il suffit de
brancher le rotor et le stator dans l’autre sens. Et l’induit reçoit une puissance de
Pe m=EI
Maintenant supposons que le flux utile sous un pôle est proportionnel au courant
d’excitation I, ainsi Φ =k.I avec k=constante . De plus . On a donc E =K Φ Ω
avec la vitesse angulaire Ω .
Voyons rapidement la puissance utile P u de ce moteur. On a P u =Pabs−Pj−Pc
avec Pabs la puissance absorbée ( Pabs=UI ), Pj la puissance perdue par effet
joule ( Pj=Rt × I ² ) et Pc les pertes collectives (pertes fer+pertes mécaniques) .
Ainsi le rendement de ce moteur est η=Pu/ Pabs .
Le principal inconvénient de ce type de moteur est qu’il s’emballe à vide.
Ce type de moteur est utile dans l’électroménager par exemple ou dans les actions de
traction ou de levage.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03316
Tableau récapitulatif pour ces deux moteurs:
C) Le moteur à excitation séparée
Pour ce moteur deux alimentation sont nécessaires: une pour l’inducteur et une pour
l’induit. Ici, E =U −RI =K Φ Ω , donc la vitesse de ce moteur est Ω=(U −RI )/ K Φ
et sa puissance est P u =Pabs−Pje−Pj−Pc a v e c Pabs=U.I + Ue.Ie la puissance
absorbée, Pje=U e . I e , la puissance perdue par effet joule de l’inducteur, Pj=R I ²
la puissance perdue par effet joule de l’induit et pc les pertes collectives.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03317
Ains, son rendement est η=Pu/ Pabs .
La vitesse de ce moteur est réglable par tension et est indépendante de la charge. De
plus, elle fournit un couple important à faible vitesse ce qui peut être utile pour les
machines-outils ou le levage.
D) Le moteur à aimant permanent
Dans le moteur à aimants permanents, le rotor et le stator sont constitués
d’aimants dont les pôles identiques sont mis face à face afin de permettre le
mouvement du moteur grâce au champ magnétique créé. Les pôles identiques se
repoussent ce qui met le moteur en mouvement.
Le principal avantage de ce type de moteur réside
dans sa durée de vie élevée qui correspond à celle des
aimants (environ 400 ans). En revanche, les moteurs à
aimants permanent peuvent être encombrant lorsque l’on
veut obtenir des moteurs puissants car il faut des aimants
plus puissants.
Rotor et stator d’un moteur à aimants permanents
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03318
II - Partie pratique : Réalisation du moteur
A) Recherche des pièces du moteur
Dans un premier temps, après avoir fini la partie théorique du projet, nous avons
décidé de rechercher des pièces du moteur que nous pouvions réaliser sans
commander de nouveau matériel. Nous avons ainsi eu accès à l’atelier ainsi qu’aux
pièces déjà utilisées pour ce même projet l’année précédente. Nous avons ainsi pu
récupérer notre bâti, quatre aimants et diverses pièces de bois pour réaliser le rotor et
le stator. Nous avons préféré ne pas utiliser les bobines de fil de cuivre qui était déjà à
l’INSA car nous pensions leur longueur insuffisante pour le nombre de spires que nous
voulions faire sur notre rotor. Notre professeur nous avait en effet indiqué que l’année
précédente que le nombre de spires devait être important pour une bonne rotation.
Nous avons ensuite passé une commande sur le site Conrad afin d’obtenir les
éléments manquants pour concevoir notre moteur. Il nous a donc fallu des plaques de
cuivre pour les commutateurs, une bobine de cuivre car nous voulions une bobine de
100 mètres et une tige de carbone pour notre axe.
B) Construction du bâti
Pour le bâti, nous avions déjà récupéré un objet en bois constitué d’une plaque
servant de socle sur lequel étaient fixés deux tige de bois verticale se faisant face. Il
nous a donc suffi de demander aux techniciens de percer ces tiges afin d’y faire passer
notre axe de rotation.
Avec des morceau de bois récupérés dans l’atelier nous avons ensuite découpé
à l’aide d’une scie deux disques pour former notre rotor. Nous avons ensuite demandé
au technicien de découper quatre encoches pour fixer les deux bobines que nous
voulions mettre.
C) Bobinage
Nous voulions au départ faire une bobine possédant le plus de spires possibles
avec une bobine de 100 mètres. Au final nous avons opté pour un moteur à deux
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03319
bobines de 200 spires en théorie. Cela devait permettre au moteur de gagner une plus
grand inertie et d’avoir en permanence les bobines proches des aimants la où le champ
électromagnétique et l’induction sont le plus élevés. Nous avons pu avec la bobine faire
deux bobines, l’une de 200 spires et l’autre de 150 car nous avons surestimé le nombre
de tours possibles.
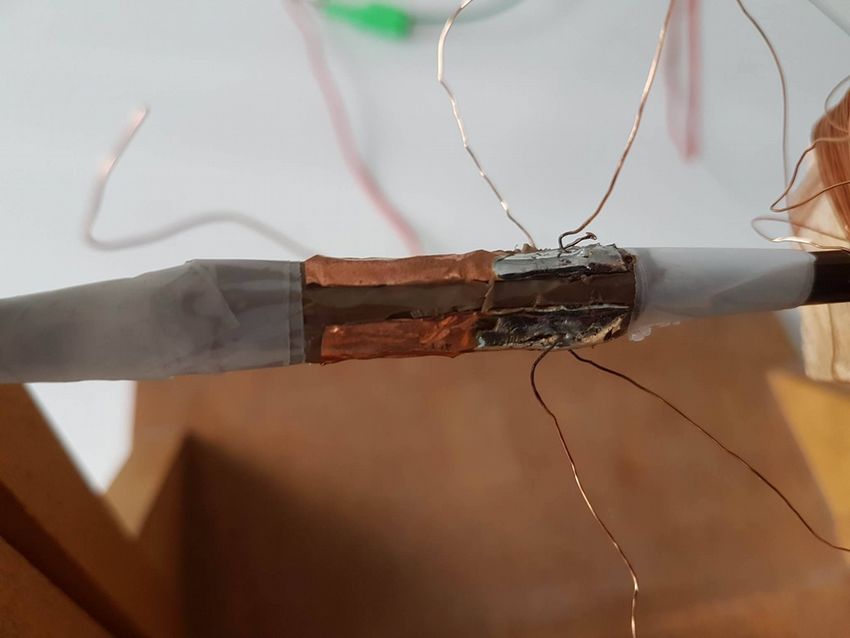
D) Commutateurs
Une fois le bobinage terminé, il fallait maintenant réalisé l’une des parties les
plus importante du moteur : les commutateurs . En effet, le moteur a besoin de
contacteurs et de balais pour être alimenté. Ces commutateurs doivent pouvoir inverser
le sens du courant parcourant la bobine lors de sa rotation sans quoi le moteur
changerais sans cesse de sens de rotation.
Nous nous sommes donc procuré
de fines feuilles de cuivres que nous
avons fixés sur un tuyau en caoutchouc
que nous avons scotché à l’axe de rotation
pour éviter son mouvement. Nous avons
ensuite découpé la plaque en quatre
parties égales, deux pour chaque bobine
Notre professeur nous a ensuite demandé
de souder les extrémités de chaque
bobine aux plaques de cuivre. Cette étape
s’est révélée assez compliquée car aucun
de nous ne savait vraiment souder et nous
étions relativement pressés par le temps.
Il fallait aussi faire attention au positionnement des plaques de cuivre par rapport
aux bobines car le commutateur d’une bobine doit être positionné en fonction de celle-
ci.
E) Tests du moteur
Pris de cours par le temps, nous n’avons pas eu le temps de rajouter les stators
que nous avions fabriqué pour fixer les aimants de chaque côté du rotor. Nous sommes
donc directement passés aux tests du moteur. Nous avons d’abord effectué un test
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03320
électromagnétique pour vérifier la bonne circulation du courant. En alimentant, on
obtenait pour une tension de 12V un courant de 1A.
Une fois sur que le courant circulait bien dans notre moteur nous avons alors
essayé de le faire tourner. Nous avons d’abord fait quelques essais infructueux mais
notre rotor avait légèrement tourné sur l’axe et il n’était plus correctement positionné
par rapport au commutateur. A force de persévérance, nous avons réussi à obtenir une
faible rotation de notre moteur lorsque nous lui donnions de l'élan. Malheureusement,
nous n’avions plus le temps pour apporter plus de modifications à notre moteur et nous
avons dû nous contenter de ces résultats décevants.
F) Pistes d’amélioration
Pour améliorer notre moteur, le principal aurait probablement de refaire de
meilleurs commutateurs. En effet, ceux que nous avons utilisés étaient assez mal
réalisé du fait de notre inexpérience et de notre manque de temps. il nous fallait aussi
fixer le stator pour les aimants et trouver un moyen de fixer parfaitement notre rotor qui
si l’on exerçait trop de force pouvait tourner légèrement sur l’axe. Enfin nous n’avons
donc pas pu réaliser de mesures précises pour les comparer à des valeurs théoriques
ce qui aurait pu nous permettre de comparer notre moteur.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03321
CONCLUSION
Pour conclure, nous pouvons affirmer que la réalisation de ce projet fut une
expérience tout à fait unique pour nous quatre. Elle nous a donné la possibilité
d’approcher au plus près des notions théoriques, techniques, pratiques et humaines à
la fois.
Nous avons ainsi pu toucher du doigt un peu plus encore le métier de l’ingénieur
et les méthodes de travail que sont les siennes. De plus, le travail de groupe et la
nécessité de s’entraider par moment afin de comprendre un phénomène, d’identifier un
problème ou encore d’en résoudre un, a permis à chacun d’appréhender un peu plus
des méthodes de communication pour de futurs projets.
De plus, nous avons éprouvés une certaine fierté à voir notre projet aboutir. Le
fait que le moteur parvienne à tourner quelques instants nous a vraiment rendu fiers
des efforts que nous avons fourni depuis le début de ce projet. Nous avons conscience
que de nombreuses améliorations peuvent encore être apportées au moteur. Par
exemple, nous aurions pu tenter de faire différentes mesures telles que la vitesse de
rotation ou la détermination de la fréquence de rotation du moteur. Mais aussi d’un
point de vu pratique, la consolidation des nombreux éléments composant le moteur
serait un axe d’amélioration de perfectionnement certain.
Enfin nous tenons tout particulièrement à remercier Monsieur Guillotin, notre
responsable de projet, qui a su nous venir en aide par moment et nous expliquer de
manière explicite certains points difficiles que nous avons pu rencontrer. Nous le
remercions donc et sachant qu’il s’agissait là d’un de ses derniers projets avant sa
retraite, nous lui souhaitons une bonne retraite pleines de belles choses.
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 03322
BIBLIOGRAPHIE
http://eskimon.fr/285-arduino-601-le-moteur-courant-continu
http://www.cpge-brizeux.fr/casiers/francoise/cours/convpuiss/ConvPuis2.pdf
https://www.energieplus-lesite.be/index.php?id=11530
http://elec-ing.blogspot.fr/2015/08/machine-courant-continu.html
http://energiein.e-monsite.com/pages/55-moteur-a-aimant-permanent.html
http://sertella.free.fr/cours_psi_physique/conversion/conversion%20chapitre%2003.pdf
http://slideplayer.fr/slide/4842528/
ANNEXE
Cours sur les conversions électromécaniques de la CPGE De Brizeux
INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE ROUEN
Département Sciences et Techniques Pour l’Ingénieur
avenue de l'Université - 76801 Saint Etienne du Rouvray - tél : +33 (0)2 32 95 97 00 - fax : +33 (0)2 32 95 98 60
STPI / P6 / 2017 - 033Vous pouvez aussi lire