Robotique agricole : Des opportunités mais de nombreux challenges à relever - FCBA
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Robotique agricole :
Des opportunités mais de nombreux
challenges à relever
M. Berducat
Irstea
Département scientifique Ecotechnologies
Unité de Recherche TSCF – Clermont-Ferrand
FCBA - Commission Professionnelle « Approvisionnement»
www.irstea.fr
Cluny – 20/06/2018
Prévision de Marché de la Robotique Agricole
Source https://www.tractica.com/newsroom/press-releases/
agricultural-robot-revenue-to-reach-74-1-billion-worldwide-by-2024/ (dec2016)
Situation actuelle : Niveaux de maturité Technologies
Early Early
Proof of Concept Market
Semi commercial Commercial Maturity
(R&D Prototypes) Penetration
Trials sales
- Contacts avec environnement
(sol, végétation)
Robotique - Pas de Préhension
& Production Végétale Milking robots
-Cleaning
-Feeding
- Pas de Contact avec environnement robots
(sol, végétation)
- Pas de Préhension
Robotique
Autonomous & Production Animale
Scouting robots robotic weeding
Fruit Picking
robots Spraying robots
- Contacts avec environnement Classification en 3 categories
(sol végétation) Source : A. Bechar
- Avec Préhension Volcani Center - Israel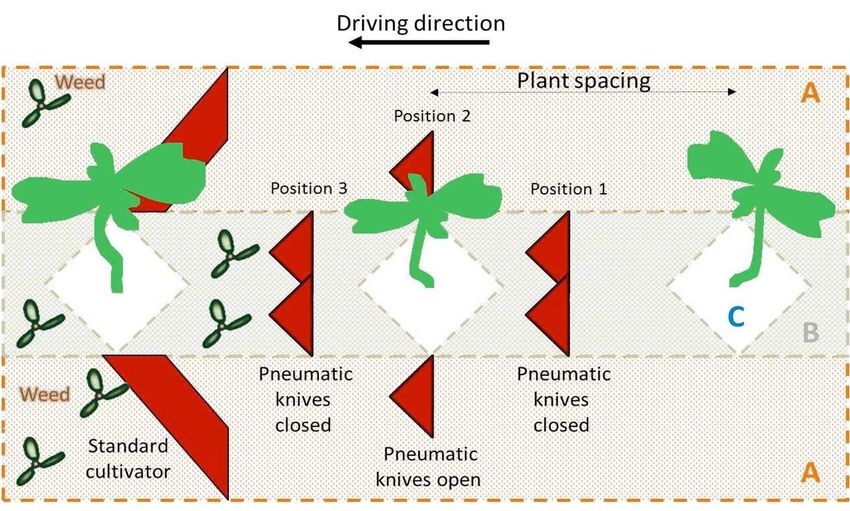
Robotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique :
- Opérations de suivis des cultures, transports, pulvérisation…
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….
source: A. Bechar
ARO Volcani Center -
Israel
Robotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique :
- Opérations de suivis des cultures, transports, pulvérisation…
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….
6 (source : https://www.fastcoexist.com/3065212/why-agriculture-could-be-automated-before-other-industries (2017))

Sarclage - Binage manuel :
Tâche pénible et fastidieuse…
…même après un effort d’ergonomie !!
source : Université de Liège – Gembloux -2012
Opération de Binage :
Possibilité apportée par la technologie…
source : Farmbot (2016) : https://youtu.be/6CWKrJbkoUU
…de façon plus ou moins opportune !!
(respect des plantes de la culture, de l’environnement,..)
Opération de Binage :
Possibilité apportée par la technologie…
Lefort Guillaume @AgriAvenir – 4 mai 2018
Test de désherbage thermique, pour
trouver des alternatives au #Glyphosate:
Bilan 70 à 350Kg de gaz/Ha, 3Ha/Heure,
10L/Ha Gasoil
?
Source : https://twitter.com/AgriAvenir/status/992637070404476928
…de façon plus ou moins opportune !!
(respect des plantes de la culture, de l’environnement,..)
Opération de Binage :
Possibilité apportée par la technologie…
Source : https://www.vitisphere.com/actualite- Source :
87601-Dsherbage-sous-tension.- 25 mai 2018 http://www.entraid.com/articles/zasso-
electrocute-mauvaises-herbes
Démonstration en Champagne – Salon Terre Innovation
Prototype de désherbage électrique Electroherb
proposé par la société suisse Zasso (technique importée du Brésil)
Outil présenté : - largeur 1,2m composé de 12 unités électriques
(bandes métalliques de 10 cm qui effleurent l’herbe)
- 1500 à 3000 V
- vitesse avancement 2 à 7 km/h
- poids : 250 kg avant + 1 tonne pour le générateur à l’arrière du tracteur
- annonce présérie en 2019 / commercialisation en 2020
…de façon plus ou moins opportune !! ?
(respect des plantes de la culture, de l’environnement,..)Opération de Binage :
Possibilité apportée par la technologie…
Source : . https://www.vitisphere.com/actualite-84483
Source : https://positivr.fr/desherbant-eau-chaude-
Mousse-party-dans-les-vignes.htm- 14 février 2018
alternative-glyphosate/ - 23 janvier 2018
Pulvérisation de vapeur d’eau à 120 °c
Dépôt de mousse à 75 °C
proposé par entreprise
sous le rang de vigne
bretonne Oeliatec
(machines pour arboriculture, vigne, maraichage proposé par entreprise Italienne
en cours d’étude)
…de façon plus ou moins opportune !! ?
(respect des plantes de la culture, de l’environnement,..)Opération de Binage :
Possibilité apportée par la technologie robotique
Ladybird + RIPPA
Sydney Univ
Illinois Univ (USA) (AU)
AgBot II
QUT Science
and Engineering Univ
source: https://www.youtube.com/watch?
(AU) 2016 v=15tovWSnJe0
Actuellement : Encore et toujours
de très nombreux travaux de R&D dans le mondeOpération de Binage :
Possibilité apportée par la technologie robotique
Danemark : AGROINTELLI
Allemagne : BoniRob2
Applied Sciences Osnabruck Univ
+ Amazone + Bosh – (2015)
Angleterre + Norvège
Bonirob.wmv : Thorvald
Lincoln Univ (GB) +
Norvegian Univ of Life Sciences
(2016)
Actuellement : Encore et toujours
de très nombreux travaux de R&D dans le mondeOpération de Binage :
Possibilité apportée par la technologie robotique
Naïo Technologies :
Robot OZ (2014)
OZ.wmv
Agreenculture : Robot CENTEOL (2016)
source: https://www.youtube.com/watch?v=ujqa7J9rUO4
Vitibot (2017)
source: https://fr-fr.facebook.com/VitiBot/
Centeol.wmv
France : Une offre plurielleOpération de Binage par la technologie robotique
un rapide calcul :
Rendement de chantier : 1m/s x 0,5m x 3600s = 1 800 m2 (0,18 ha/h)
=> 1,8 ha/10 heures
soit 11 jours pour parcelle de 50 hectares
(24 h/24, hypothèse d’une ligne droite infinie)
des réponses à dimensionner
par rapport aux types de chantiers !!Opération de Binage par la technologie robotique
Naïo Technologies :
Carré : Robot DINO (2016)
Robot ANATIS (2015) source: https://www.youtube.com/watch?v=TtsYmA31jIQ
Vitesse : 3-4 km/h
source: https://www.youtube.com/watch?v=f_sDzoDUCec
Dimensions : Longueur 2,50 m / Hauteur 1,30 m
planches : 1,40 m à 1,80 m entre axe roue
Anatis.wmv Masse (hors outils) : 600 kg (selon configuration batterie et outils)
Autonomie : 4 à 8 heures
Dino.wmv
SITIA & Co
Robot PUMAGRI (2016)
des réponses à dimensionner
par rapport aux types de chantiers !!Opération de Binage
QUID pour les grandes cultures ?
Bineuses intelligentes guidées par vision artificielle : une réalité
source : Agronomic
(02-F)
source : Poulsen - DK
source :
Steketee - NL
source : Carre (85–F)
source : Garford – (GB)Opération de Binage
QUID pour les grandes cultures ?
Bineuses intelligentes guidées par vision artificielle: une réalité
source : Garford - GB
un rapide calcul :
Rendement de chantier : 3m/s x 12 m x 3600s = 129 600 m2 (13 ha/h)
=> 130 ha / 10 heures
(hypothèse d’une ligne droite infinie)
des réponses à dimensionner
par rapport aux types de chantiers !!Opération de Binage des grandes cultures
par solutions robotiques ?
=> Robotiser le tracteur !! (équipé d’une bineuse)
source : Université de Pise – I
www.rhea-project.eu
source :
Center for Automation and Robotics RHEA Robot Fleets Highly for
(CSIC – Madrid – E)
Effective Agriculture
and Forestry Management
Projet R&D Européen FP7 2010-2014
NMP2009
Coordinateur CICV – EspagneOpération de Binage des grandes cultures
par solutions robotiques ?
( Machines et tassement des sols ? )
Le phénomène complexe de tassement dépend de plusieurs
critères:
- du sol
- Granulométrie ou texture
- Consistance du sol en surface
- taux d’humidité
- de la machine
- Pressions pneumatiques (chenilles) pour couches superficielles (jusqu’à 25 cm de profondeur)
- Charge à l’essieu pour couches profondes (horizon 30 cm-1m)
- Vitesse
- des pratiques agricoles
-La conduite des cultures
-Fréquence des passages
-Météorologie et période d’interventionOpération de Binage des grandes cultures
par solutions robotiques ?
=> optimum: des machines ni trop grosses..., ni trop petites !!
«3eme voie»
(Grandes Cultures)
Projet RHEA
source : Center for Automation and Robotics
(CSIC – Madrid – ES)
Association / Coopération de machines
intelligentes de tailles moyennesVers la réalisation d’un chantier (maïs)
de 50 hectares par des robots
5 équipements / opérations
- Préparation lit de semence
- Fertilisation localisée + Modulation semis
- Fertilisation post-levée
- Pulvérisation
- Binage
Challenge Centeol (2018)
KUHN – AgreenCulture
Pionner – Ausy – CompoExpert - Orange
source: Terre-net -https://www.terre-net.fr/materiel-agricole/travail-sol-semis/article/challenge-centeol-2018-210-137589.html
https://twitter.com/search?q=Centeol&src=typd&lang=fr
des réponses à dimensionner
par rapport aux types de chantiers !!Opération de Binage
=> Vers toujours plus de précision !
Inter-rang
Intra-rang
Inter-rang
source : Université Davis - USA
Binage Intra-rang
(entre plants de la même rangée)Binage intra-rang
=> 1/ Approches pragmatiques de détection des adventices
Source : Garford – GB (2012)
Robocrop-onions.wmv
Source : Poulsen – DK ( 2012)
Solutions de perception par vision artificielle déjà
commercialisée sur les bineuses intelligentesBinage intra-rang
=> 2/Travaux de R&D conduits pour la détection des adventices
Techniques de discrimination
des adventices par :
- Vision / Capteur Multi spectrale
Visible / Proche Infra Rouge
- Morphologie
- Texture
- Hauteur
source : Université de Liège
- Gembloux - Belgique
De très nombreux travaux dans le monde
relatifs à l’identification des adventicesBinage intra-rang
=> Outils actifs pilotés pour l’élimination des adventices
(voir limitation/retardement de leurs croissances)
source :
BOSH Deepfield Robotic
(DE)
source : Université Davis (USA)
– Année 2011
Action mécanique par dents mobilesBinage intra-rang
=> Outils actifs pilotés pour l’élimination des adventices
(voir limitation/retardement de leurs croissances)
Intelligent Localized
Spray (ILS)
2011
EcoRobotix
Tecnoma (CH)
Agrosup Dijon
(F)
BlueRiver
source: (USA)
https://www.agweb.com/mobile/article/
robotic-weed-killer-nears-farmland-naa-chris-bennett/
Action chimique localisée
(NB : surtout encore au niveau inter-rangs)Binage intra-rang
=> Outils actifs pilotés pour l’élimination des adventices
(voir limitation/retardement de leurs croissances)
Dispositif de
désherbage
électrique,
sélectif et directif
Brevet Cemagref
Harper Adams Univ (GB)
(2017)
https://www.harper-adams.ac.uk/research/project.cfm?id=185
source : Poulsen – DK
(2012)
Autres actions : thermique, laser, électrique,…Opération de Binage
=> vers un système intégré
source : www.rhea-project.eu
source : RHEA (Irstea – Montpellier - F)
Exemples de critères
d’optimisation de chantiers
(temps intervention,
énergie consommées,…
/ zones infestées priorisées)
Projet Européen RHEA (2010-2013) :
Robot Fleets Highly for Effective Agriculture
and Forestry Management
…où de l’intérêt de prendre de la hauteur !!Opération de Binage
=> vers un système intégré
Agriculture: un appel à projets prochainement lancé sur le thème
« Robotique et capteurs au service de la réduction des pesticides »
Mieux observer, interpréter et intervenir de manière
ciblée pour limiter la dépendance aux pesticides
http://www.agence-nationale-recherche.fr/informations/actualites/detail/agriculture-un-appel-a-projets-
prochainement-lance-sur-le-theme-robotique-et-capteurs-au-service-de-la-reduction-des-
pesticides/?utm_source=fluxrss&utm_campaign=RSS4 projets de recherche financés :
- BIPBIP
- PEAD
- ROSEAU
- WeedElec2017
OPEROSE :
Organisation OPérationnelle du Challenge ROSE
14,
75 8
c cm
Site Irstea Montoldre Culture de maïs m
5
1
c
5 5
m
Culture de mâche en planche c c
mmMarge de progrès / évolution
=> vers un système intégré raisonné
sur l’ensemble des interventions du cycle de production?
Exemple : GEOseed® - KVERNELAND
(système breveté)
« les semoirs de précision GEOseed permettent
de semer en parallèle ou en diamant grâce à des
capteurs de synchronisation placés sur les cœurs
semeurs.
- Alignement des graines en mode parallèle ou
diamant (quinconce)
- Espace régulier autour de chaque plante
facilitant ainsi la récolte (ex: un flux régulier à
l'effeuillage, au décolletage et arrachage des
betteraves)
Source : http://fr.kverneland.com/Semis/Semoirs-de-Precision/
- Possibilité d'entretien mécanique de la
Semoirs-de-Precision/Kverneland-Optima#130883 culture (type binage) suivant l'espacement
entre graines »
Ex: Possibilité de simplifier opération de binage grâce à
l’amélioration précision/ changement de pratiques
lors de l’opération de semis=> vers un système intégré raisonné
sur l’ensemble des interventions du cycle de production?
MECABIOFOR
Exemple : Planteuse Grande Capacité
Irstea – SATT-GC (système breveté)
avec la contribution
Ex: Possibilité de simplifier opération de binage grâce à
l’amélioration précision/ changement de pratiques
lors de l’opération de plantationAutre possibilité d’entretien inter-intra rangs
de certaines cultures
=> Tonte du couvert végétal
VITIROVER
2016 – (F)
Source: https://www.youtube.com/watch?v=TigC3-SUegM
Vitirover.wmvAutre possibilité d’entretien inter-intra rangs
de certaines cultures
=> Tonte du couvert végétal
GreenBot
PrecisionMakers – (NL)
“A versatile machine with a lifting device that can lift up to 750 kg. The Cat II
lifting device at the rear can lift up to 1,500 kg. Greenbot is available in two GreenBot.wmv
widths: 1.3 metres or 1.8 metres. The ground clearance is 35 centimetres”,
source: https://www.youtube.com/watch?v=Xano8YE4wYI&feature=youtu.beRobotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique :
- Opérations de suivis des cultures, transports, pulvérisation…
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….37 (source : https://www.fastcoexist.com/3065212/why-agriculture-could-be-automated-before-other-industries (2017))
Robotique de cueillette des fruits :
De très nombreux travaux de R&D dans le monde
Australie
RoboticsPlus Ltd (NZ),
Auckland University, Waikato
University
Agricultural and Biological Eng.
University of Florida – USA (source: http://www.roboticsplus.co.nz/multipurpose-orchard-robotics)
(source 2015: T. Burks)
stade maturité « Preuve de Concept »Robotique de cueillette des fruits :
Rester «lucide» et ne pas se laisser «subjuguer par les effets d’annonce»!!
Exemple: Annonce qui a fait le « Buzz » il y a 1 mois
dans les medias professionnelles / réseaux sociaux
Abundant Robotics Inc - Californie (USA)
Start-up soutenue par GV-Google Ventures
(source : https://www.youtube.com/watch?v=mS0coCmXiYU)
Fausse bonne idée ?Robotique de cueillette des fruits:
Travaux de R&D en Europe
Participants
- Wageningen UR (NL)
- University of Leuven (BE)
- Ben-Gurion University (IL)
- University of Ljubljana (SI)
- UMEA University (SE)
- Università degli Studi di Milano (IT)
- CSIC, Inst. de Automatica Industrial (ES)
- Technical University Munich (DE)
- Case New Holland NV (BE)
- INIA PROGAP (CL)
- Force-A (FR)
- Festo (DE)
- Swedish Univ. of Agricultural Sciences (SE)
- Jentjens Machinetechniek (NL)
European Project
sept 2014
(source : https://www.youtube.com/watch?v=UlaNDm88yZo) Crops.wmv
Première observation : long temps de cycle
et délais de réponse des bras manipulateurs !!Vers des robots performants et économiquement
viables pour l’agriculture :
Nécessité de co-convevoir le robot et l’Agro-systeme associé
Optimisation Systèmes Robotiques / Environnements de production
Choisir le bon environnement Conception de robots optimaux
pour la mise en œuvre «simples» pour
de robots «simples» la réalisation des tâches définiesRobotique agricole :
=> Complexité des environnements de travail
=> Niveaux de complexité interactions robot/cultures végétales
Source:
A.Degani
TECHNION
Israel Institute of
TechnologyRobotique de cueillette des fruits :
FFRobotics – (Israel)
Fresh Fruit Harvester
(source: https://www.youtube.com/watch?v=UaL3UxUclKY)
Exemple d’un système «simple»
(bras principal reposant sur déplacement linéaire)Technologies robotique pour la cueillette
des fruits : Exemple de Challenge
Préhension de corps mous sans endommagement
Soft Robotics Octopus Gripper
Flexible Microactuator (7DOF) FESTO
(source : https://www.youtube.com/watch?v=kHGLYRUKWeM) (source : https://youtu.be/ZPUvA98uSj8)
Exemples de pistes de solutions futuresRobotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique
exemple : Débardage / Transport
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….Exemple de l’assistance aux opérateurs
stade maturité « Adopteurs précoces » (Early Commercial Sales)
BAUDET-ROB (1) et (2) : plateformes d’assistance aux opérateurs
Baudet-rob.wmv
Effibot.wmv https://youtu.be/Ers9Pd8e9IYExemple de l’assistance aux opérateurs
Prochaine Génération :
Gestion complète de la
transitique dans la parcelle
Source: Effidence
Windegger - Neo Alpin (D)
source : https://youtu.be/20YmFjS-g18 Windegger.wmvRobotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique
exemple : Pulvérisation
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….Exemple de la protection phytosanitaire
/ Pulvérisation
stade maturité « Adopteurs précoces » (Early Commercial Sales)
Cäsar robot TED robot (2016)
RAUSSENDORF Gmbh Naïo Technologies - IFV
Univ Dresde – Fraunhofer Ml Cäsar.wmv
Motor (kW) :Kubota V2607 (49 KW/2700 rpm)
Dimensions L x W x H: 3000 x 1300 x 980 mm
Weight:1600 kg
source : http://www.raussendorf.de/pdf/raussendorf-obstroboter-01.pdfSolutions robotisées :
Prochaines évolutions/adaptations
Possibilité augmentation performance par couplage de fonctions
The ability to do simultaneously
actions on the robotic platform
gives the possibility to compensate
the low machine output (due to
low work width)
=> Economical aspect to considerSolutions robotisées :
Prochaines évolutions/adaptations
Possibilité augmentation performance par couplage de fonctions
RAUSSENDORF Gmbh
Dresde Univ, Osnabruck Univ
(Allemagne) Naîo Technologies
IFV + LAAS – 2016 - (F)
source : http://linkis.com/www.youtube.com/BYpNO
TED.wmvExemple de la Protection phytosanitaire
/ Pulvérisation
Prochaine Génération :
Couplage virtuel de plateformes de chaque coté du rang
Projet Adap2E
Irstea – Octobre 2016
Journée RMT AgroETICA Adap2E.wmvRobotique & Agriculture :
Structuration en trois niveaux (de complexité)
Cas des productions végétales :
- Niveau I / Absence de contact physique
exemple : Suivi des cultures – Inspection / recueil data
- Niveau II/ Avec contact physique et pas d’actions de préhension
- (désherbage mécanique), rognage, éclaircissage de fleurs…
- Niveau III/ Avec contact physique et actions de préhension
- cueillette de fruits, taille, (trans)plantation….Exemple du suivi des cultures
stade maturité « Preuve de Concept »
VINBOT
Robotnik - 2016 - (S) AGROB V14, V16
Source : INSESC Tec – 2016 – (P)
https://www.youtube.com/watch?v=B0W_8BWEwAk https://www.youtube.com/watch?v=-hnesOBbQSY
ViINBOT.wmv
AGROB.wmv VINEROBOT – FP7
2016 – (S)
VINEROBOT.wmv
https://www.youtube.com/watch?v=R9KSQhgZTbg&feature=youtu.beRobotique agricole :
des opportunités mais de nombreux challenges à relever
Exemples
- Perception et interprétation de scènes
(Cartographie dynamique de l’environnement 360° et longue portée; Fusion capteurs,
Modèles d’évolution de plateformes; Capacité décisionnelle haut niveau …)
- Supervision et Interactions Humain-Machine
(Nouveaux outils pour permettre à l’operateur humain d’appréhender à distance espace de travail)
- Sécurité, Sûreté de fonctionnement et Intégrité
(Obstacles de différentes natures, mais également Risques d’instabilité dynamique robot;
Garantie de maintien dans l’espace d’évolution définie )
- Conception d’architectures / Systèmes robotiques innovants
(Nouvelles architectures des véhicules; Motricité; Motorisation…)
- Manipulation et contrôle d'outils dédiés (dont bras manipulateurs)
(Gérer en dynamique les interactions fines entre plateforme mobile et ses périphériques)
- Coopération de robots
(en essaim [100 à 1000], en grappe [10]; Coopération vecteurs terrestres / aériens…)
- Intégration des robots comme objets connectés
(Machines au sein du système de production global; Partage informations multi-échelle)Robots agricoles
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Agricultural Système de
perception
Interface robot
Homme
Machine
Contrôle Décision
/ Commande / supervision
encore énormément de verrous
scientifiques et technologique à lever !!exemple: Contrôle / Commande
Années 2010 :
Années 2020
Espaces ouverts plats et
Espaces ouverts complexes !!
structurés
solutions robotisées futures
performances accrues :
Solutions aux stades (- terrain en pente
“prototypes laboratoire” ou - présence de glissements
commercialisées en qqs unités - environnements complexes
(- faible vitesse) - haute vitesse
- …)Robotique Agricole
et Production végétale
Pas seulement une dimension technologique !!
⇒ Beaucoup d’autres clefs à réunir
pour ouvrir le marchéAdoption
Economique
/ Retour sur
Investissement
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Agricultural Système de
perception
Interface robot
Homme
Machine
Contrôle Décision
/ Commande / supervisionAdoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
de Chantier
Agricultural Système de
perception & Qualité
Interface robot du Travail
Homme
Machine
Contrôle Décision
/ Commande / supervisionAdoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
de Chantier
Agricultural Système de
perception & Qualité
Interface robot du Travail
Homme
Machine
Contrôle Décision
/ Commande / supervision
Facilité
d’utilisation
/ ManagementCNH Autonomous
Tractor concept
2017
Source: Ref [4]“ la robotique agricole ne commence pas dans le
champ, mais dans la cour de l’exploitation agricole !! »
CNH Autonomous
Tractor concept
2017
Source: Ref [4]
Quelle facilité pour effectuer les manœuvres d’attelage d’outils
avec une tablette informatique ?⇒ Robotiser l’ensemble des fonctions de la mission
(Préparation, (transport), Exécution au champ, Gestion fin de mission)
⇒ Exemple 1 :
⇒ Exemple 2 :
AutoConnect – John Deere SynTrac – Germany
(2014)
(2017)
Source: Ref [6] Source: Ref [7]⇒ Robotiser l’ensemble des fonctions de la mission
(Préparation, (transport), Exécution au champ, Gestion fin de mission)
⇒ Exemple 1 :
⇒ Exemple 2 :
AutoConnect – John Deere SynTrac – Germany
(2014)
(2017)
Source: Ref [6] Source: Ref [7]
⇒ Exemple 3 : ⇒ Exemple 4:
Scott-Automation « Carla » First mobile charging
Source:
Source: (2016) Extrait Robot for e-cars (2018)
Ref [8]
Ref [9]Adoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
de Chantier
Agricultural Système de
perception & Qualité
Interface robot du Travail
Homme
Machine
Contrôle Décision
/ Commande / supervision
Facilité
d’utilisation
/ Management
Respect de
l’EnvironnementEvolution des machines agricoles depuis 1 siècle :
“Toujours plus grosses, toujours plus puissantes…
mais aussi toujours plus lourdes !!”
Tassements
1/ couche superficielle
( jusqu’à 25 cm )
=> Dépend Pression d’interface
2/ Couche profonde (30 cm – 1 m)
⇒ dépend de la charge Essieu
de la machine=> Petits robots pour une agriculture de Precision
à l’echelle de la plante (2eme voie)
( source : B.S. Blackmore and all « A specification for an autonomous crop production mechanization system »
University of Thessaly, Greece, ICPA, 9th Denver, July 2008, 16p)
=> Illustration de la Voie 2 : Projet MARS/XAVER - Fendt
FENDT :
MARS
(2014-2017)
XAVER
(AgriTechnica
Nov 2017)
Source:
Ref [10]Respect de l’Environnement
Essaim de petits robots (2eme Voie)
« Et si les petits robots conduisaient par leurs passages
répétés sur pratiquement 90 % de la surface du champ
à une compaction superficielle du sol ? »Facilité d’utilisation / Gestion
“ la robotique agricole ne commence pas dans le champ,
mais dans la cour de l’exploitation agricole !! »
Essaim de petits robots = Problème logistique
qq peu accentuée !!
X = 100 unités …Adoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
de Chantier
Agricultural Système de
perception & Qualité
Interface robot du Travail
Homme
Machine
Contrôle Décision
/ Commande / supervision
Facilité
d’utilisation
/ Management
Sécurité Respect de
/ Responsabilité l’Environnement
(Normalisation)Sécurité et Robots agricoles
OK pour considérations
portées sur détection d’obstacles !!
(see ISO 18497 -
Agricultural machinery and tractors
– Safety of highly automated machinery )
mais nécessité d’intégrer bien d’autres risques :
- Instabilité dynamique / renversements :
Irstea developments :
Estimation of dynamic loads (normal forces)
on each side of the vehicle from inertial Fa
G,m
behaviour observations of the robotic platform F n1
P
O'
Lateral Load Transfert
- Dispositif de sécurité maintien
robot(s) dans l’aire de travailAdoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
de Chantier
Agricultural Système de
perception & Qualité
Interface robot du Travail
Homme
Machine
Contrôle Décision
/ Commande / supervision
Facilité
Intégration
d’utilisation
Robot(s)
/ Management
ds système
de Production
Globale
Sécurité Respect de
/ Responsabilité l’Environnement
(Normalisation)Farm Management Information System
Integration of agricultural robots
Source http://spudsmart.com/demystifying-data/
Trimble connected farm solution
https://www.research.bayer.com/en/digital-farming.aspxFarm Management Information System
Integration of agricultural robots
++ todo
5 Functional levels of a
manufacturing control operation
in industry sector
Source : Daniele Pugliesi - Own work, CC BY-SA 3.0,
https://commons.wikimedia.org/w/index.php?curid=31527335Farm Management System / Digital Farming
Integration of agricultural robots
http://www.cema-agri.org/
page/digital-farming
-what-does-it-really-mean
1990-2000: Agriculture 3.0
- Guidance, Sensing & Control,
Telematics, Data management
2010: Agriculture 4.0
- Cheap and improved sensors and actuators,
- Low cost micro-proçessors,
- High bandwidth cellular communication,
- Cloud based ICT systems
- Big data analytics
2020… Agriculture 5.0
- unmanned operations (robotics)
- Autonomous decision systems (AI)
https://iot-analytics.com/industrial-internet-disrupt-smart-factory/Adoption
Economique
/ Retour sur
Investissement
Robustesse
/ Fiabilité
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
Robotique de Chantier
Agricultural Système de
au service perception & Qualité
de (nouveaux) Interface robot du Travail
Modes de Homme
Machine
culture
Contrôle Décision
/ Commande / supervision
Facilité
Intégration
d’utilisation
Robot(s)
/ Management
ds système de
Production
Globale
Sécurité Respect de
/ Responsabilité l’Environnement
(Normalisation)Nouvelles opportunités apportées par la robotique
Source : C. Cariou - Irstea - TSCF
Effets bénéfiques des interactions mutuelles
des cultures associéesAdoption
Perception
Economique
/ Acceptation
/ Retour sur
de la Société
Investissement
Robustesse
Education / Fiabilité
/ Formation
Architecture Source
Mécatronique d’ energie
conventionnelle / Motorisation
/rupture ?)
Rendement
Robotique de Chantier
Agricultural Système de
au service perception & Qualité
de (nouveaux) Interface robot du Travail
Modes de Homme
Machine
culture
Contrôle Décision
/ Commande / supervision
Facilité
Intégration
d’utilisation
Robot(s)
/ Management
ds système de
Production
Globale
Sécurité Respect de
/ Responsabilité l’Environnement
(Normalisation)« OUI » au foisonnement d’idées,
à l’innovation ouverte …
Source: Ref [11]
Voie 22 ? (22eme siècle )Genèse
• 2014 - Rapport « Bournigal » sur l’évolution des Agroéquipements
• 2015 - Rapport « Agriculture et innovation en 2025 »
Définition « Axes et projets »
• Robotique
• Accélérer de la recherche et le développement en robotique agricole
• Structurer et accompagner le tissu industriel en robotique agricole
• Mettre en place les dispositifs de test et qualification des robots agricole
• Agriculture numérique
• Mise en place d’un portail de données à vocation agricole pour l’innovation
ouverte
• Structuration de la recherche numérique en agriculture
• 2016 - Comité d’Actions lancé sur la robotique
• Groupe de discussion avec les acteurs
• 2017
• Esquisse de l’organisation
• Identification des besoins et axes de travail sur la robotique
Création de l’ Association
• 20 Octobre 2017 Selon Loi 1901 sans but lucratifObjectif et missions
• Objectif :
Accélérer le développement et la mise sur le
marché par les industriels et les start-ups de
solutions robotiques pour l’agriculture
avec comme axes stratégiques de :
• Produire des connaissances, des méthodes,
des solutions technologiques opérationnelles,
• Favoriser des rencontres entre les sphères de R&D,
du monde académique et des bureaux d’études,
• De porter une vision d’avenir sur les
agroéquipements du futurObjectif et missions
8 missions :
– S1 : la mise en place d’une veille scientifique et technologique
– S2 : le développement de solutions robotiques au sein de
consortiums restreints
– S3 : la mise en place d’outils logiciels communs de développement
– S4 : la constitution d’une bibliothèque d’algorithmes
– S5 : la mise en œuvre de démonstrateurs / bases robotiques mobiles
pilotes ouvertes
– S6 : la qualification des performances & la certification
– S7 : les travaux de normalisation FR/EN/ISO
– S8 : la promotion et la disséminationMembres et Acteurs
61 membres fondateurs au 31/12/2017
répartis en 4 collèges
Collège A : 22
Industriels : 15
Start-up, PME,TPE : 7
AGCO, Agreenculture, AXEMA, Berthoud Agricoles, Dintec, Downs,
Ecorobotix, Elcabe, Jeantil, Kuhn, Laforge, Manitou,Octopus robots,
Mx, Naio Technologie, Pellenc Sa,SITIA, Sodijantes,Tecnoma
Technologies, Trust’ing-Alf’ing, Vitibot, VitiroverMembres et Acteurs
Collège B : 10
Fournisseurs de solutions techniques
Actia Automotive, Carbon Bee Agtech, CIO Systèmes embarqués,
FDintégrateur (Agrotronix), Hydac Sarl, Hydrokit, IFM electronic,
Poclain, Pilgrim technologies, Sick SarlMembres et Acteurs Collège C : 25 Laboratoires de Recherche, Centres techniques, Pôles de compétitivité, Enseignement,.. ACTA, Agri sud Ouest Innovation, Agronov, CEA List, CTIFL, Irstea, IUT Châlon/Saône, LNE, VEGEPOLYS, VITAGORA, ViaMéca, ID4CAR, XLIM Limoges, LIRMM Montpellier, ISIR Paris 6, MINES Paris Tech , LAAS Toulouse, Le2i ViBot Dijon, UniLaSalle, Vesoul Agro campus, Institut Pascal Clermont-Fd ,INP Purpan, INNSET Saint-Quentin, Clusters Inno’vin, INVENIO
Membres et Acteurs
Collège D : 4
Représentants des utilisateurs finaux : Coopératives,
Assurances, Organismes professionnels,..
ACOLYANCE, CIVC, FNAMS, SOFIPROTEOL
Pilotage de l’association :
• Un bureau : 4 membres
• Un conseil d’administration de 13 membres :
A 5; B 3;C 3; D 2
• Un conseil scientifique de 12 membres
A 3; B 3;C 5;D 1Merci
michel.berducat@irstea.fr
@BerducatMichelVidéos - Références • Ref [1] : GoodFruitGrower – 2016 - https://www.youtube.com/watch?v=UaL3UxUclKY&t=22s • Ref [2], CROPS FP7 project – 2015- https://www.youtube.com/watch?v=cav9N-cfvkI&feature=youtu.be • Ref [3]: GoodFruitGrower - Abundant Robotics Inc – 2016 : https://youtu.be/TBcWZcjXr-I • Ref [4], [5] : CNH - 2016 - https://www.youtube.com/watch?v=GU81B1kZYbk&feature=youtu.be • Ref [6] : John-Deere - AutoConnect – 2014 - https://www.youtube.com/watch?v=CfwZ0RSj9ec • Ref [7] : Syntrac - 2017 - https://t.co/qgN3S1oVB4 • Ref [8] : Scott-Automation - Robofuel 2016 : https://youtu.be/Ei_qrqJ_Ieg • Ref [9] : Carla – VW - Source : https://www.youtube.com/watch?feature=player_embedded&v=WhwNJZTrafI • Ref [10] : Landtechnik der Zukunft - 2017 - https://www.youtube.com/watch?v=a5_kQScrZew&feature=youtu.be • Ref [11] : @FuturAgricultur - 2017 - https://twitter.com/FuturAgricultur/status/890835754611609600
Vous pouvez aussi lire

















































