TP 12.1 Essuie-glace Mercedes
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
COMPORTEMENT CINEMATIQUE DES SYSTEMES
TP 12.1 Essuie-glace Mercedes
Objectifs :
Il est proposé dans ce TP :
• d’évaluer l’écart, à l’aide d’une simulation assistée par ordinateur, entre le comportement
cinématique du système d’essuie-glace étudié et un système traditionnel ;
• de mettre en évidence les propriétés graphiques des vecteurs vitesses de différents points
appartenant à un même solide.
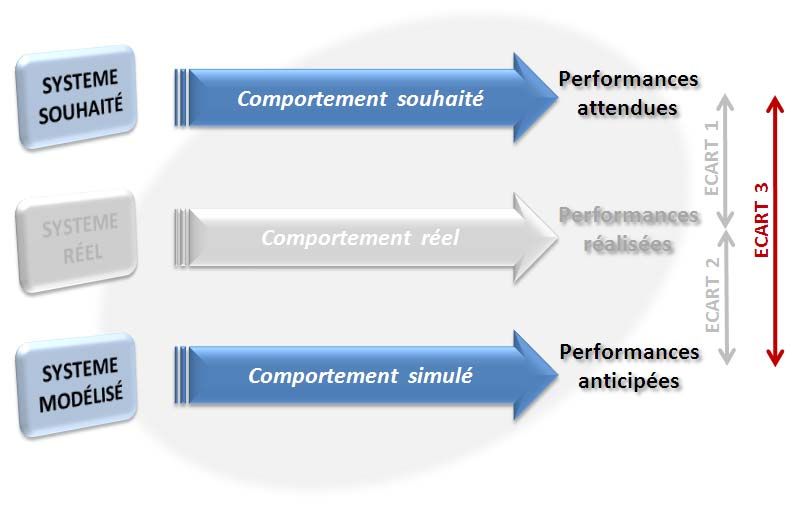
La démarche de l’ingénieur d’étude :
Identifier, mesurer et analyser les écarts entre les performances du système souhaité, du système réel
et du système simulé. Tous cela dans le but de réduire ces écarts.
TP 12.1 Essuie-glace Mercedes - Sujet Page 1/6 14/11/2011SAVOIRS ET SAVOIR-FAIRE
Les observations, manipulations, mesures et simulations que vous allez réaliser au travers des
activités proposées doivent vous permettre d’acquérir ou d’approfondir les outils et les méthodes
listées ci-dessous.
Savoirs : je connais
Les différents types de mouvement d’un solide par rapport à un autre
la relation de composition des vecteurs vitesse et des vecteurs rotation
la relation du champ des vecteurs vitesse d’un solide
Savoir-faire : je sais
donner la nature d’un mouvement mouvement d’un solide
décrire la trajectoire d’un point appartenant à un solide en mouvement
simuler, à l’aide d’un logiciel, le comportement cinématique d’un système
choisir et appliquer les méthodes de résolution graphique d’un problème de cinématique
ORGANISATION DE LA SEANCE
Les activités proposées sont à réaliser en 2 heures et en autonomie (sauf indication particulière).
Les parties 1, 2 et 3 sont à réaliser dans l’ordre et , simultanément, par les deux binômes qui se
partagent le système.
Les résultats d’activités seront rédigés sur une feuille libre et sur le(s) document(s) réponse mis à
disposition. Ils pourront aussi, à la demande du professeur, être uniquement exprimés à l’oral lors
d’un échange avec ce dernier.
RESSOURCES MATERIELLES ET NUMERIQUES
Pour réaliser les activités proposées, vous avez à votre disposition :
• le système réel instrumenté ;
• le dossier multimédia du système sur le site internet de votre professeur ;
• le cours « Comportement cinématique des systèmes » que vous pouvez retrouver sur le site
internet de votre professeur.
1 - Découverte du système
Activité 1 :
Ressources Dossier Présentation
nécessaires multimédia Constitution du système et fonctionnement du moto-réducteur
• Réaliser les activités décrites dans le dossier multimédia, et observer le système réel.
TP 12.1 Essuie-glace Mercedes - Sujet Page 2/6 14/11/20112 – Simulation assistée par ordinateur du comportement
cinématique du système d’essuie-glace
L’objectif de cette partie est de mettre en évidence le gain de surface balayée sur le pare-brise par
le système Bosh-Mercedes rapport à un système d’essuie-glace « traditionnel ».
2.1 Mouvement de rotation alternative
Dans cette partie, on ne s’intéresse pas à toute la chaîne d’énergie du système d’essuie-glace. On
s’intéresse uniquement aux éléments qui permettent, à partir du mouvement de rotation en sortie
du moteur, de créer le mouvement de rotation alternatif du balancier 5.
C’est ce dispositif de transformation de mouvement qui est utilisé sur les systèmes à essuie-glace
central, où le balancier 5 est alors directement le porte balai.
Ce dispositif peut-être schématisé de la façon suivante :
NB : [ON] représente l’arrête horizontale basse du pare-brise
D
5
O 0 N Ce trait symbolise un balai d’essuie-glace
A qui serait fixé directement fixé sur le
0 7 balancier dans le cas d’un système
3 4 6 E
d’essuie-glace traditionnel.
M
B
C
Activité 2 :
Ressources Dossier
Mécanisme de commande en rotation alternative du balancier 5 / bâti fixe 0
nécessaires multimédia
• Repérer sur le système réel les différents éléments qui participent à la transformation de
mouvement.
Activité 3 :
Dossier
Mécanisme de commande en rotation alternative du balancier 5 / bâti fixe 0
multimédia
Travaux Pratiques ⇒ TP 12.1 ⇒ Ressources ⇒ Tutoriel du logiciel
Ressources Tutoriel
Mecaplan de Solidworks
nécessaires
Logiciel Mecaplan de Solidworks
Travaux Pratiques ⇒ TP 12.1 ⇒ Ressources ⇒ TP 12.1 Essuie-glace
Fichier
Mercedes .zip
• Effacer tous les fichiers et répertoires placés à l’intérieur du répertoire « mes documents
élève » situé sur le bureau, à l’exception du répertoire « 00 Digiview » s'il existe.
• Copier dans le répertoire « mes documents élèves », le fichier « TP 12.1 Essuie-glace
Mercedes.zip », puis extraire son contenu.
• Lancer le logiciel SolidWorks, puis ouvrir le fichier « Essuie-glace Mercedes (Rotation
alternative) » situé dans le répertoire « mes documents Élève ».
L’esquisse de paramétrage et les différentes pièces (à part le balancier 5) ont déjà été réalisées.
• Construire, en utilisant si nécessaire le tutoriel du logiciel Mecaplan pour Solidworks, le
balancier 5.
TP 12.1 Essuie-glace Mercedes - Sujet Page 3/6 14/11/2011• Cacher l'esquisse de paramétrage puis construire les différentes liaisons entre pièces.
• Lancer le calcul mécanique (Vous devez obtenir « Le mécanisme est isostatique, et possède
un degré de mobilité égal à 1 »).
• Piloter la bonne liaison d’entrée en indiquant une vitesse en tr/min.
• Renseigner la durée du mouvement à simuler qui nous assure de pouvoir observer un tour
complet de la manivelle 3.
• Renseigner un nombre de position qui nous assure une rotation maximale de la manivelle 3
de 1° entre deux calculs du logiciel.
• Simuler le mouvement.
JJJJJJJG JJJJJJJG JJJJJJJG
• Afficher sur l'écran à l'échelle « 0,3 » les vecteurs vitesses VA∈4/0 , VB∈4/0 et VC∈4/0 .
• Simuler le mouvement, en affichant ces vecteurs "seuls". Pour cela, il faut préciser dans
l’onglet "trajectoire" du mode "simulation" :
- seulement le champ des vecteurs vitesses sans sa trajectoire,
- seulement le vecteur correspondant à la position en cours.
• Simuler le mouvement en mode pas à pas. Pour cela, cliquer sur pause, puis utiliser les
flèches pour faire avancer évoluer pas à pas la position du mécanisme.
• En cliquant droit sur la liaison Pivot entre le bâti fixe 0 et le balancier 5, puis en
sélectionnant « Résultats », dans l’onglet « Liaison », il est possible de consulter l’évolution
de la position angulaire du balancier 5 par rapport au bâti fixe 0 au cours du mouvement.
NB : il est possible de changer d’unité
• Mesurer l’amplitude du mouvement en degré et la commenter.
Les valeurs des positions angulaires du balancier 5 par rapport au bâti fixe 0 qui se situent dans le
tableau de gauche (temps et angle), vont être utilisées dans la suite.
Elles vont constituer les données d’entrée de la 2ème partie de la chaine d’énergie du système
d’essuie-glace : le dispositif de transformation/combinaison du mouvement de rotation alternative
en/avec mouvement de translation alternative.
• Cliquer droit sur le tableau, puis enregistrer ces données au format « courbe (*.crb) » dans
le répertoire « mes documents élève » situé sur le bureau.
2.1 Mouvement de translation alternative
Dans cette partie, on ne s’intéresse à la suite de la chaîne d’énergie du système d’essuie-glace. On
s’intéresse aux éléments qui permettent, à partir du mouvement de rotation alternative du balancier
5, de créer un mouvement combiné de rotation et de translation alternative du support de balai 14.
Activité 4 :
Ressources Dossier Mécanisme de commande en translation alternative du support de balai 14
nécessaires multimédia / balancier 5
• Repérer sur le système réel les différents éléments qui participent à la transformation de
mouvement.
TP 12.1 Essuie-glace Mercedes - Sujet Page 4/6 14/11/2011Activité 5 :
Dossier Mécanisme de commande en translation alternative du support de balai 14
multimédia / balancier 5
Travaux Pratiques ⇒ TP 12.1 ⇒ Ressources ⇒ Tutoriel du logiciel
Ressources Tutoriel
Mecaplan de Solidworks
nécessaires
Logiciel Mecaplan de Solidworks
Travaux Pratiques ⇒ TP 12.1 ⇒ Ressources ⇒ TP 12.1 Essuie-glace
Fichier
Mercedes .zip
• Ouvrir, à partir du logiciel SolidWorks, le fichier « Essuie-glace Mercedes (translation
alternative) » situé dans le répertoire « mes documents Élève ».
L’esquisse de paramétrage, les différentes pièces, et les différentes liaisons ont été définies mais La
longueur du balai dessiné correspond à la moitié de la longueur du balai réel.
• Mettre le balai a sa taille réelle en modifiant l’esquisse de paramétrage.
• Cacher l’esquisse de paramétrage puis lancer le calcul mécanique (Vous devez obtenir « Le
mécanisme est isostatique, et possède un degré de mobilité égal à 1 »).
• Piloter la bonne liaison d’entrée, en sélectionnant pour celle-ci :
- un mouvement de type « Position variable » (au lieu de « uniforme »),
- le fichier que vous avez enregistré précédemment, dans la colonne « courbe »,
- 50 positions calculées et sur une durée de 1,132075 s.
• Simuler le mouvement.
• Tracer la trajectoire du point situé à l’extrémité du demi-balai 14 par rapport au bâti fixe 0.
• Proposer et mettre en œuvre une méthode permettant de visualiser sous Mecaplan, le gain
de surface balayée de ce système par rapport à un système mono-balai classique .
Aide : on pourra superposer sur le même écran TF ∈balai /0 et TF ∈?/0 .
3 – Propriétés graphiques des vecteurs vitesse
L’objectif de cette partie est de mettre en évidence les propriétés des vecteurs vitesses de
différents points appartenant à un même solide. Ces propriétés sont utilisées dans les méthodes
de résolution graphique des problèmes de cinématique.
Activité 6 :
Tutoriel Découverte du logiciel Mecaplan de Solidworks
Ressources
Logiciel Mecaplan de Solidworks
nécessaires
Fichier Fichier obtenu à la fin de la partie 2
• Afficher, à l’aide du logiciel Mecaplan, les vecteurs vitesse de 3 points du balai et cela dans
deux positions différentes du système. (Utiliser une échelle pour que les vecteurs ne soient
ni trop grands ni trop petits).
• Réaliser un « imprime écran » (touche du clavier « Impécr »), puis ouvrir un nouveau fichier
OpenOffice.org Writer, coller, et enfin imprimer pour chaque position.
• En prenant successivement deux à deux les points du balai, projeter le vecteur vitesse de
chacun des deux points sur la droite qui relie les deux points. Que constate-t-on ?
TP 12.1 Essuie-glace Mercedes - Sujet Page 5/6 14/11/2011• Tracer les perpendiculaires aux vecteurs vitesse de chacun des points du balai. Que
constate-t-on ? Comparer pour les deux positions du balai.
• Proposer, au vue des résultats des questions précédentes, une méthode qui permettrait de
déterminer graphiquement le vecteur vitesse du centre de gravité G du balai.
Eteindre le système et l’ordinateur. Merci de laisser votre espace de travail plus propre que vous ne l’avez
trouvé, chaises rangées et tables nettoyées !
TP 12.1 Essuie-glace Mercedes - Sujet Page 6/6 14/11/2011Vous pouvez aussi lire