DÉVELOPPEMENT D'UNE INFRASTRUCTURE DE CONDUITE HAUTEMENT AUTONOME - Aperçu d'un schéma directeur technologique - HPE
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Livre blanc technique DÉVELOPPEMENT D'UNE INFRASTRUCTURE DE CONDUITE HAUTEMENT AUTONOME Aperçu d'un schéma directeur technologique
Livre blanc technique
SOMMAIRE
1. Introduction........................................................................................................................................................................................................................................................................................................................... 3
1.1. Étendue du problème ....................................................................................................................................................................................................................................................................................... 4
2. Niveaux d'autonomie .................................................................................................................................................................................................................................................................................................... 6
3. Acquisition, transformation, analyse des données ............................................................................................................................................................................................................................ 6
3.1 Principes clés ............................................................................................................................................................................................................................................................................................................. 6
4. Le parcours de bout en bout de HAD .......................................................................................................................................................................................................................................................... 7
4.1 Enregistrement des données ...................................................................................................................................................................................................................................................................... 8
4.2 Ingestion des données ...................................................................................................................................................................................................................................................................................... 8
4.3 Lac de données ....................................................................................................................................................................................................................................................................................................... 9
4.4 Techniques "Software-in-the-loop" et "Hardware-in-the-loop" (HIL/SIL) .......................................................................................................................................................... 9
4.5 Archive et sauvegarde ...................................................................................................................................................................................................................................................................................10
5. Services et partenariats ...........................................................................................................................................................................................................................................................................................10
5.1 Créer ...............................................................................................................................................................................................................................................................................................................................10
5.2 Exploiter ......................................................................................................................................................................................................................................................................................................................10
5.3 Utiliser ...........................................................................................................................................................................................................................................................................................................................11
5.4 Collaborer...................................................................................................................................................................................................................................................................................................................11
6. Conclusion ...........................................................................................................................................................................................................................................................................................................................11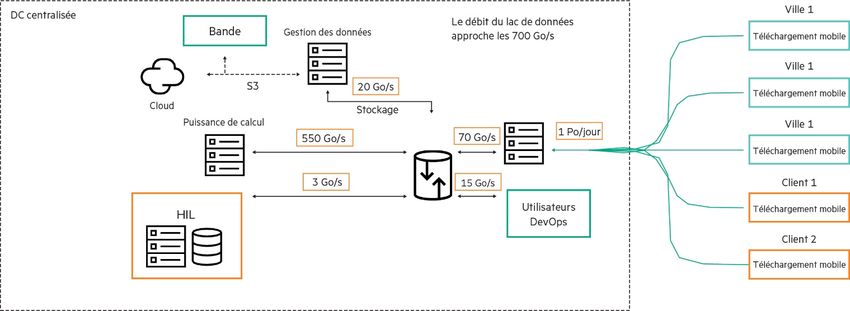
Livre blanc technique Page 3 1. INTRODUCTION La technologie des véhicules autonomes est sur le point de perturber l'industrie du transport avec de profondes implications à long terme sur notre société, affectant notre façon de vivre, de travailler et de faire des affaires. La technologie de conduite autonome promet de faire reculer le nombre de décès de la route, de réduire la congestion et d'accroître le temps de disponibilité. Elle introduit également de nouveaux concepts de transport, notamment les taxis autoguidés et les modèles de propriété partagée des véhicules de transport as-a-service. Les produits et services de conduite autonome comprennent en outre l'auto-stationnement et l'auto-entretien. L'aménagement du territoire et l'urbanisme devraient également bénéficier de cette technologie qui entraîne une diminution du nombre de voitures sur les routes. Cela s'accompagne d'importantes économies grâce à une utilisation plus efficace du carburant et à des coûts de fonctionnement plus faibles. Cependant, les véhicules autonomes présentent également des défis importants : • La conduite peut être difficile dans les voitures conventionnelles - encore plus, pour un système de sécurité automatisé qui doit fonctionner avec une tolérance d'erreur très faible dans toutes les conditions de conduite. • Les données générées et consommées par les voitures autonomes sont importantes - Selon un rapport récent, le marché mondial des voitures connectées devrait croître de 270 % d'ici 2022. Selon les prévisions, plus de 125 millions de voitures particulières avec connectivité intégrée devraient être expédiées dans le monde entre 2018 et 2022.1 • Le développement de la conduite autonome dans son ensemble coûtera des milliards de dollars, tandis que le prix d'une conduite totalement autonome dans une voiture individuelle pourrait atteindre les 100 000 dollars. 2 • Les infrastructures devront être modernisées. Et pour assurer la sécurité et la cohérence des nouveaux types de véhicules, les routes devront peut-être devenir plus intelligentes. Atteindre ce niveau de cohérence au niveau international ou même seulement dans les villes constituera un véritable défi. • Les questions de réglementation et de responsabilité devront également être prises en compte (par exemple, si une voiture autonome provoque un accident, qui est responsable : le conducteur, le constructeur automobile ou l'entreprise qui a développé le logiciel autonome ?) • L'éducation et la sensibilisation des consommateurs sont également nécessaires pour s'assurer que ces derniers font des choix éclairés et ne réagissent pas aux rumeurs, aux mythes ou aux perceptions erronées concernant l'industrie et la technologie. Depuis qu'il existe des automobiles, la technologie n'a cessé de rendre les véhicules plus sécuritaires. À partir des années 1970, les constructeurs automobiles ont introduit les airbags qui sauvent des milliers de vies chaque année. Les freins antiblocage, courants depuis les années 1990, réduisent de 6 à 8 % les accidents non mortels.3 Cependant, les accidents de voiture tuent encore près de 1,3 million de personnes chaque année. 4 L'aboutissement du calcul haute performance, de l'apprentissage automatique, des nouvelles technologies de détection (par exemple, le LIDAR) et de l'IT de pointe puissante, offrent la perspective de réduire considérablement ces décès insensés en mettant en œuvre la conduite autonome. La croissance économique et l'accélération de l'urbanisation entraînent également un essor des embouteillages sur les routes. Une personne habitant en banlieue passe en moyenne 40 minutes par jour dans la circulation. En un an, ce travailleur a perdu 167 heures - plus de quatre semaines de travail à temps plein - assis derrière le volant, incapable de se concentrer sur autre chose que, bien sûr, la conduite. Les voitures sans conducteur joueront un rôle clé dans l'avenir des villes intelligentes et auront une incidence sur la façon dont les infrastructures des villes seront conçues et construites. Aujourd'hui, les États-Unis disposent à eux seuls de plus de 700 millions de places de stationnement réservées, soit une superficie équivalente à celle de l'ensemble de l'État du Connecticut. La voiture moyenne n'utilise que 4 % du temps, alors que certaines estimations relatives à la conduite autonome montrent que l'utilisation sera plus proche de 75 %.5 Pour ces raisons, les véhicules autonomes devraient constituer l'épine dorsale des futures villes intelligentes. La conduite autonome et les solutions de mobilité partagées devraient permettre de faire converger les modèles commerciaux de la réservation en ligne et du covoiturage. Selon le rapport publié par Allied Market Research, le marché mondial des véhicules autonomes était estimé à 54,23 milliards de dollars en 2019, et devrait atteindre 556,67 milliards de dollars d'ici 2026, enregistrant un TCAC de 39,47% de 2019 à 2026.6 La conduite hautement autonome (HAD) et les fonctions semi-autonomes des systèmes avancés d'aide à la conduite (ADAS) exigent une plateforme de calcul et de détection à la fois au cœur et à la périphérie du réseau. Les solutions de stockage et d'archivage haute performance de HPE renforcent encore un déploiement robuste, qui protège les données et les prépare pour l'analyse. De nombreuses solutions HAD peuvent nécessiter des modèles de consommation as-a-service et d'autres modèles de consommation à l'usage, dans lesquels les solutions flexibles HPE GreenLake se spécialisent — simplifiant l'infrastructure IT tout en préservant la confidentialité et le contrôle. 1 « Connected cars report: 125 million vehicles by 2022, 5G coming (« Rapport sur les voitures connectées : 125 millions de véhicules d'ici 2022, 5G à venir »), » Internet of Business, 2018 2 « The true cost of autonomous cars (« Le coût réel des voitures autonomes »), » Axios, 2018 3 « Government study confirms ABS effectiveness, but mysteries linger (« Une étude gouvernementale confirme l'efficacité de l'ABS, mais des mystères subsistent », » Consumer Reports News, 2009 4 « Road traffic injuries (« Accidents de la route »), » Organisation mondiale de la santé, 2018 5 « How self-driving cars will help solve America's parking problem (« Comment la conduite autonome va aider à résoudre le problème du stationnement aux États-Unis »), » Axios, 2018 6 “Global Autonomous Vehicle Market is Expected to Reach $556.67 Billion by 2026 (« Le marché mondial des véhicules autonomes devrait atteindre 556,67 milliards de dollars d'ici 2026 »),” Allied Market Research, 2019
Livre blanc technique Page 4
Ce livre blanc exposera l'étendue du problème de la HAD, notamment les principaux éléments et composants d'une solution de véhicule
hautement automatisée ou autonome :
• La section 2 présentera les niveaux traditionnels d'autonomie des véhicules (niveaux 0 à 5).
• La section 3 traitera de la nature, de la taille et de la portée des données impliquées dans un véhicule de HAD.
• La section 4 abordera le trajet de bout en bout pour une solution typique de HAD de niveau 3 et de niveau 4.
• La section 5 décrira les HPE Pointnext Services et les partenariats pertinents pour un déploiement HAD.
1.1. Étendue du problème
Pressentir Comprendre Détection d'objets
Perception Décision Action
SCHEMA 1. Éléments de base clés du développement d'une voiture autonome
1. Pressentir—Le HAD repose sur la technologie des capteurs intégrés aux véhicules. Les principaux capteurs sont le GPS/Inertial
Measurement Unit (IMU), les caméras, le LIDAR, le radar, les ultrasons et divers capteurs à l'intérieur et dans le groupe motopropulseur.
Certaines technologies sont déjà bien établies (par exemple, le GPS, les appareils photo), tandis que d'autres, comme le LIDAR, sont
aujourd'hui coûteuses, mais leur prix et leur taille devraient baisser à mesure que le marché de la HAD arrivera à maturité. Ce premier
jalon consiste ensuite à intégrer l'ensemble des capteurs de la voiture pour établir une description riche en données du milieu environnant.
2. Comprendre—Les modèles d'apprentissage automatique dans la voiture (le périphérique) et dans les data centers connectés (le cœur)
effectuent des simulations pour faire correspondre les données des capteurs à des scénarios connus et prétraités (par exemple, ceux
d'une route encombrée un jour de pluie, ou d'un parking la nuit). Un véhicule basera sa prise de décision, en partie, sur les modèles
l'entraînant à comprendre son environnement et assurer sa sécurité. Lorsque de nouvelles données arrivent, le véhicule doit également
être capable d'établir une corrélation croisée et de faire confiance aux flux de données d'origine.
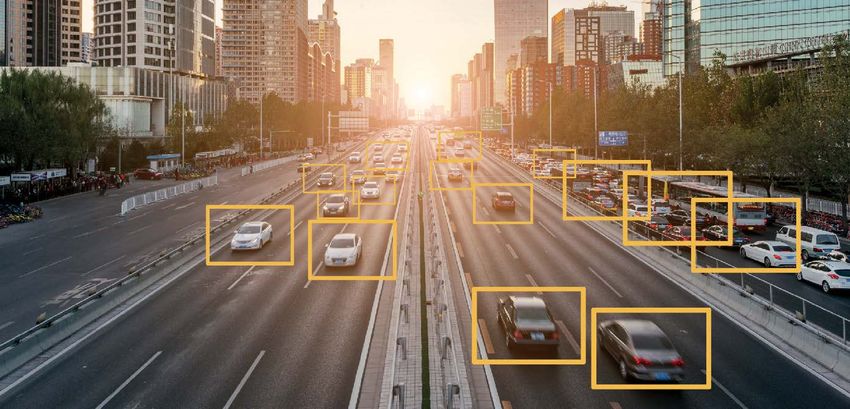
3. Détection d'objets—L'étape de détection fait la distinction entre les autres véhicules, les voies de circulation, les panneaux de signalisation,
les piétons, les itinéraires, etc.. L'objectif est de détecter des objets dans l'environnement et d'en déduire le contexte - que ce soit sur un
environnement encore indéterminé ou sur des cartes à haute définition. La détection des panneaux routiers est bien sûr essentielle, tout
comme la communication entre le véhicule et l'infrastructure ainsi que les autres véhicules (V2X).
4. Perception—La perception consiste à comparer des modèles aux nouvelles données afin de découvrir les objets et leur relation avec
l'environnement au sens large. Les composantes de ce bloc sont la localisation (où se trouve la voiture ?), la contextualisation (quel est
l'environnement, peut-être à l'aide de cartes haute définition ?), la reconnaissance d'objets (intégrant les données du LIDAR et d'autres
capteurs) et le suivi d'objets (en passant par des modèles intelligents).
5. Décision—La décision consiste à préparer l'action. Que fait la voiture ensuite ? Doit-elle tourner ? Doit-elle freiner ? Doit-elle avancer ?
L'unité de traitement primaire d'un véhicule prend ses décisions sur la base de données de capteurs situées dans l'environnement du
véhicule. Les modèles sont formés par l'apprentissage automatique et soutiennent les grandes quantités de données enregistrées par
la suite de capteurs. Cela crée des algorithmes qui peuvent être utilisés pour déduire des résultats potentiels reposant sur des flux
d'informations contextuelles en direct. À partir de là, la logique peut être appliquée pour déterminer la ligne de conduite préférée.
L'objectif principal est de mettre en place une stratégie de conduite comprenant l'évitement des obstacles, la planification du
comportement, le contrôle du GPS, la planification des itinéraires et la prévision d'événements qui n'ont pas été détectés.
6. Action—Une fois qu'une décision a été prise sur ce qu'il faut faire ensuite, le véhicule doit appliquer la décision aussi rapidement que
possible. L'intelligence logicielle est ici nécessaire, car il est essentiel de comprendre la portée de l'action dans son contexte. Si c'est une
journée d'été ensoleillée avec des routes sèches, les conditions pour tourner la voiture à gauche sont bien sûr très différentes de celles
d'une journée d'hiver avec des routes glissantes. Les constructeurs automobiles ont déjà commencé à s'attaquer à ce problème en
utilisant les fonctions d'assistance au changement de voie ou de régulateur de vitesse adaptatif des voitures. Cependant, c'est toujours
un défi de demander à un système de contrôle de se comporter correctement en fonction du monde qui entoure le véhicule.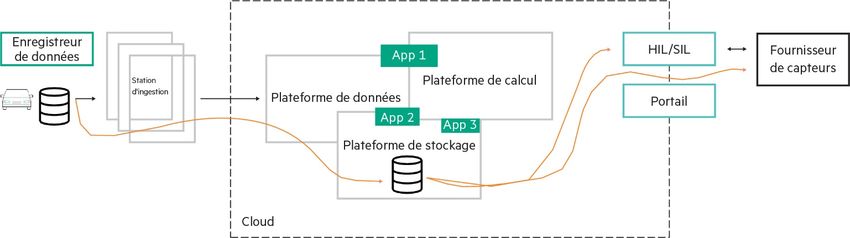
Livre blanc technique Page 5
En gardant à l'esprit les éléments de base ci-dessus, examinons les composantes clés d'un système HAD. Les données des capteurs sont
généralement recueillies dans des boîtes de mesure situées dans le coffre des voitures (voir le paragraphe « Acquisition, transformation,
analyse des données »). Le premier défi des tests HAD consiste à décharger les données et à les stocker dans une station d'ingestion
(également appelée station de téléchargement ou mémoire tampon). Le magasin de données principal est généralement une solution de
cloud hybride dont la majorité des composants se trouvent dans le data center, avec la possibilité d'utiliser le cloud en cas de pic.
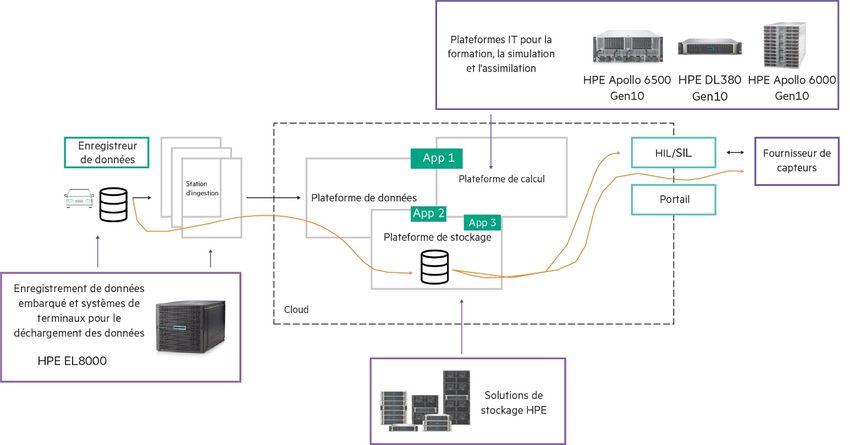
SCHEMA 2. Une vision de haut niveau des composantes du développement HAD de bout en bout
En fonction de la complexité de la voiture et de la quantité de logiciels de simulation utilisés, les tests de développement des solutions HAD
se déroulent généralement en trois étapes :
• Model-in-the-loop (modèle dans la boucle) (MIL) Les essais testent le modèle et l'environnement d'exploitation du système sans tester
également le matériel du système HAD (il fonctionne normalement sur des postes de travail génériques). Les essais MIL ont généralement
lieu aux premiers stades d'un cycle de développement.
• Software-in-the-loop (logiciel dans la boucle) (SIL) Les essais testent et valident le code généré automatiquement utilisé dans le
contrôleur du système. Les tests SIL sont souvent effectués dans un environnement simulé, même sans le matériel du système HAD.
• Hardware-in-the-loop (matériel dans la boucle) (HIL) Les essais permettent de tester et de valider le matériel du système HAD afin de
révéler toute défaillance causée par le compilateur cible ou l'architecture matérielle.
Il existe de multiples façons de traiter les données recueillies par les différents capteurs. Les données vidéo peuvent être stockées avec les
données du groupe motopropulseur ou les informations LiDAR. Les fichiers de données sont stockés dans la plateforme back-end et utilisés
pour le traitement de l'IA ainsi que pour les tests des hardware et software-in-the-loop (HIL/SIL). Les développeurs de capteurs externes
utilisent ces données pour tester et perfectionner les capteurs des véhicules.
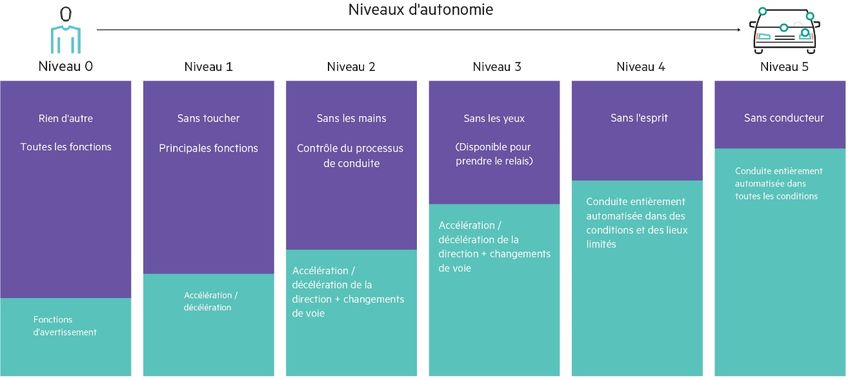
SCHEMA 3. La classification des niveaux d'autonomie des HAD, établie par la Society of Automotive Engineers (Société des ingénieurs automobiles) (SAE) 7
7
« Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (« Taxonomie et définitions des termes relatifs aux systèmes
d'automatisation de la conduite des véhicules à moteur sur route »), » J3016_201806, SAE International, 2018Livre blanc technique Page 6
2. NIVEAUX D'AUTONOMIE
Selon la SAE approuvée par la National Highway Traffic Safety Administration (Administration nationale de la sécurité routière) (NHTSA),
l'autonomie des véhicules est mesurée selon une hiérarchie à six niveaux, du niveau 0 au niveau 5 :
• Niveau 0 : Aucune automatisation—Toute les opérations de conduite sont assurées par le conducteur humain. La voiture peut être équipée de
certains systèmes d'alerte, mais la tâche de conduite dynamique est entièrement effectuée par l'homme.
• Niveau 1 : Assistance au conducteur—Le véhicule est capable d'exécuter des tâches spécifiques comme la décélération et l'accélération en
utilisant des informations obtenues de l'environnement. Cependant, le conducteur humain est censé avoir le contrôle et effectuer la tâche de
conduite dynamique.
• Niveau 2 : Automatisation partielle—Le véhicule est capable de diriger (changement de voie) et d'accélérer et décélérer. Cependant,
le conducteur humain reste toujours maître de la situation en exécutant tous les autres aspects de la tâche de conduite dynamique.
• Niveau 3 : Automatisation conditionnelle—Le véhicule est responsable de tous les aspects de la conduite dynamique, même si le conducteur
humain doit être en mesure d'intervenir chaque fois que cela lui est demandé.
• Niveau 4 : Haute automatisation—Le véhicule prend en charge l'intégralité de la conduite dynamique et peut prendre des décisions même si un
humain ne répond pas à une demande d'intervention. Cependant, cela n'est possible que dans certains scénarios de conduite comme le
covoiturage urbain ou les régions où un bon niveau de cartographie a été réalisé.
• Niveau 5 : Automatisation totale—Le véhicule peut effectuer l'ensemble des opérations de conduite dynamiques dans toutes les conditions de
route et d'environnement que peut effectuer aujourd'hui un conducteur humain.
Les récents investissements et acquisitions soulignent l'intérêt de l'industrie à poursuivre le développement de la HAD - et la course à l'autonomie
de niveau 5. Ford a investi un milliard de dollars dans Argo AI ; 8 GM a investi dans Lyft et a acquis Cruise Automation ; 9 Volvo a créé une entreprise
commune avec Uber ; 10 Uber a acheté Otto ; 11 Intel® a investi 15,3 milliards de dollars dans l'achat de Mobileye; 12 Hyundai et Toyota ont chacun
annoncé leurs propres investissements dans la recherche et développement de HAD. Il ne s'agit là que d'un échantillon restreint mais représentatif
de l'activité dans ce secteur très dynamique.
Certains OEM étudient la possibilité de proposer des voitures à conduite autonome as-a-service et s'attendent à ce qu'elles soient une source de
revenus importante. Les véhicules de niveau 3 constitueront un point tournant pour les essais technologiques, ouvrant la voie à l'adoption en masse
de la technologie HAD.
Alors que la course pour atteindre le niveau 5 s'intensifie, la plupart des grands constructeurs automobiles actuels développent ou s'associent à une autre
entité qui élabore un programme de véhicules autonomes. L'approche de chaque OEM est différente. Waymo (une société de l'Alphabet/Google™)
a annoncé qu'elle n'était intéressée que par le niveau 5. D'autres entreprises comme Uber et Ford se préparent pour le niveau 4. 13 Daimler et Bosch
ont annoncé 14 qu'ils poursuivraient à la fois le niveau 4 et le niveau 5 en essayant de les concrétiser d'ici le début de la prochaine décennie. D'autres
entreprises ont choisi la voie progressive, en passant par chaque niveau d'autonomie respectif à mesure que leur technologie HAD mûrit.
3. ACQUISITION, TRANSFORMATION, ANALYSE DES DONNEES
Rassembler les éléments constitutifs de l'infrastructure HAD conduit à la création de pipelines de données complexes allant du véhicule au back end et
vice versa. Lors de la construction du prochain véhicule HAD, les caméras périphériques (la voiture), le LiDAR et d'autres capteurs génèrent de grandes
quantités de données, car le data center forme des modèles d'IA et les accorde pour obtenir une prise de décision en direct pendant la conduite.
Un flux de données d'un capteur moyen est d'environ 33 Gbits/s, ce qui signifie ~120 To par essai de 8 heures. Bien que la technologie soit encore
en cours de développement, ces données doivent être stockées dans leur intégralité en raison des réglementations légales. La collecte de données
d'un jour d'essai de 80 véhicules conduit à 10 Po de données brutes. On peut donc s'attendre à ce qu'une petite flotte de voitures génère entre 100
et 500 Po par jour.
3.1 Principes clés
En plus de fournir un système de fichiers flexible, évolutif et performant, un environnement de recherche et développement HAD doit soutenir
les efforts de développement, de simulation et de test simultanés de plusieurs développeurs et équipes de développement. Afin de répondre
aux diverses exigences des développeurs, HPE peut fournir des environnements de type cloud aussi proches que possible des données, à la
fois au cœur et à la périphérie.
8
« Ford invests $1 billion in Pittsburgh-based Argo AI to build self-driving cars by 2021 (« Ford investit un milliard de dollars dans la société Argo AI, sise à Pittsburgh, pour
construire des voitures autonomes d'ici 2021 »), » TechCrunch, 2017
9
« GM invests $500 million in Lyft, sets out self-driving car partnership (« GM investit 500 millions de dollars dans Lyft et met en place un partenariat pour la voiture à conduite
autonome »),” Reuters, 2016; “GM buys Cruise Automation to speed self-driving car strategy (« GM achète Cruise Automation pour accélérer la stratégie de la voiture à
conduite autonome »), » Reuters, 2016
10
« Volvo Cars and Uber present production vehicle ready for self-driving (« Volvo Cars et Uber présentent un véhicule de série prêt pour la conduite autonome»), » Volvo Cars
press releases, 2019
11
« Uber buys self-driving truck startup Otto; teams with Volvo (« Uber achète un camion à conduite autonome Otto ; fait équipe avec Volvo »), » Reuters 2016
12
« Intel buys Mobileye in $15.3B deal, moves its automotive unit to Israel (« Intel achète Mobileye pour 15,3 milliards de dollars et transfère son unité automobile en Israël »), »
TechCrunch, 2017
13
« Ford aims for self-driving car with no gas pedal, no steering wheel in 5 years, CEO says (« Ford vise une voiture sans pédale d'accélérateur et sans volant dans 5 ans, selon le
PDG »), » CNBC LLC, 2017
14
La future mobilité. Bosch et Daimler unissent leurs forces pour travailler sur un système entièrement automatisé et sans conducteurLivre blanc technique Page 7 Dans ces environnements, il est impératif de minimiser les mouvements de données et d'apporter la puissance de calcul aux données, ainsi que de permettre une programmation rapide des ressources de calcul et d'accélération partagées afin d'en maximiser l'utilisation. Des solutions telles que la plateforme et le logiciel as-a-service peuvent être utiles dans ce contexte ainsi que des conteneurs qui peuvent être rapidement mis en place pour exécuter un travail particulier. Des outils sont disponibles pour construire des pipelines d'intégration continue et de développement continu (CI/CD) afin de permettre des tests agiles et efficaces et le développement d'algorithmes. 4. LE PARCOURS DE BOUT EN BOUT DE HAD Les systèmes HAD de niveaux 3 et 4 nécessitent des technologies IT novatrices. En tant que l'un des principaux fournisseurs mondiaux de calcul haute performance, HPE fournit les solutions les plus concurrentielles à des clients confrontés aux défis de calcul contemporains les plus complexes. L'objectif ultime (niveau 5) que les technologies de conduite autonome devraient permettre d'atteindre est l'omniprésence du covoiturage, où les conducteurs ne conduisent plus, et où il peut même n'y avoir aucun conducteur sur une partie du trajet. En attendant, les véhicules communiqueront entre eux, ce qui leur permettra de connaître en permanence leurs intentions et leurs progrès tout en exploitant les technologies sans fil telles que le Wi-Fi et la 5G. Tant que nous n'aurons pas atteint ce niveau d'autonomie, la conduite et les tests de niveau 3 et 4 nécessitent encore un concept solide pour la collecte, l'ingestion, la transformation, la conservation et la consommation des données. Dans cette infrastructure, les données circulent par l'intermédiaire de capteurs dans l'enregistreur de données de la voiture. Puis, en passant par le stockage embarqué, elles sont acheminées vers la station d'ingestion. De là, elles sont ingérées dans le lac de données où elles sont transformées et préparées pour l'analyse et la consommation. Au centre du flux de données se trouve le lac de données, qui stocke toutes les informations collectées par les véhicules ainsi que les résultats générés par les activités du système. Voir les schémas 4 et 5 pour les différentes étapes du flux de données fournies par un lac de données. SCHEMA 4. Flux de données du système HAD
Livre blanc technique Page 8 SCHEMA 5. Vue d'ensemble des composantes du développement HAD 4.1 Enregistrement des données L'équipement embarqué des véhicules d'essai recueille et stocke les données provenant de ses capteurs, avec des débits de données supérieurs à 30 Gbits/s. Par exemple, une flotte opérationnelle de 80 véhicules collectant 18 To de données par quart de travail de 8 heures à un débit de 5 Gbits/s génère 1,44 Po de données brutes par quart de travail. Pour le même parc de véhicules collectant à un taux de 30 Gbits/s, les données générées par poste passent à 8,64 Po. Pour des débits de données aussi élevés, la plateforme HPE Edgeline EL8000 Converged Edge System est recommandée. Le système fournit une plateforme modulaire et convergée avec la connectivité des capteurs, le calcul et le stockage en un seul endroit. Le HPE EL8000 est robuste et peut être géré à distance. Le HPE EL8000 est un enregistreur de données, qui représente une extension intégrée du data center. Le HPE EL8000 peut ingérer des dizaines de gigabits par seconde pour les flux de données LiDAR, radar et vidéo, ce qui en fait une plateforme de calcul embarquée convergée pratique pour les tests et le développement. Le HPE EL8000 PCIe relie ses E/S directement au processeur, ce qui permet un accès direct au distributeur à l'intérieur du CPU. Ainsi, le routage des données vers ou depuis la mémoire ainsi que le cache du processeur et d'autres dispositifs PCIe sont directs. Le HPE EL8000 n'est pas non plus une simple unité de stockage. Il prend en charge les CPU x86 64 bits ainsi que les accélérateurs de calcul spécialisés tels que les GPU et les FPGA. En ce sens, le HPE EL8000 représente la première étape du pipeline de transformation des données. En fait, le HPE EL8000 peut réduire considérablement l'un des goulots d'étranglement du flux de données en fournissant un marquage automatique du contenu à la volée, ce qui réduit la quantité nécessaire de prétraitement. 4.2 Ingestion des données Il existe deux options différentes pour décharger les données: • Remplacement des supports physiques : Le HPE EL8000 est équipé de lecteurs interchangeables à chaud qui peuvent être chargés et retirés du système embarqué. Des SSD sont utilisés comme supports pour minimiser le risque de perte de données dues à la manipulation et au transport. Les supports reçus du centre distant sont chargés puis transférés au data center à l'aide d'une infrastructure LAN à haut débit. • Le LAN à haut débit se décharge sur des stations d'ingestion ou des data centers : Cette approche utilise le déchargement LAN du dispositif embarqué dans le véhicule vers la station d'ingestion. Les stations d'ingestion sont situées dans les data centers où un réseau LAN à haut débit est utilisé pour connecter les véhicules à l'infrastructure du data center. Une fois connectés, les véhicules déchargent leurs données en utilisant des liaisons montantes de 100 Go vers la cible spécifiée. • Avec l'arrivée prévue de la 5G, le HPE EL8000 aura la possibilité de télécharger des données - ou certaines d'entre-elles qui sont pertinentes - pendant la conduite si l'enregistreur est équipé d'une carte 5G. Une station d'ingestion supplémentaire peut également être utilisée pour mettre en mémoire tampon les données provenant directement de la voiture de développement, ce qui lui permet de reprendre la route le plus rapidement possible.
Livre blanc technique Page 9
En plus de la mise en mémoire tampon des téléchargements, la station d'ingestion est également le premier point de triage des données.
Lors d'un essai, la grande majorité des données sont probablement sans incident et n'auront qu'une faible valeur immédiate pour le
processus de développement. Certains événements, cependant, revêtiront une plus grande valeur pour les développeurs. Dans ce cas,
les téléchargements prioritaires sont traités à la station d'ingestion, ce qui permet de libérer la voiture plus rapidement et d'apporter aux
développeurs les données les plus importantes en premier. Les développeurs pourraient choisir de mettre en œuvre différents types de
priorisation, ce qui nécessiterait une plus grande capacité de calcul que le HPE EL8000 peut fournir.
SCHEMA 6. Différents systèmes de fichiers en fonction de leurs performances et de leur évolutivité
4.3 Lac de données
Le principal défi pour la technologie de stockage à adopter pour ce flux de travail est sa capacité à évoluer. Dans le schéma 6, on peut
trouver les différentes possibilités de systèmes de fichiers, chacun avec un niveau différent d'évolutivité ou de performance.
Les systèmes de fichiers parallèles comme Lustre permettent une évolution linéaire d'une solution. Lustre a été conçu pour configurer des
éléments d'une taille et d'une performance prédéfinies, avec la possibilité d'ajouter d'autres éléments si nécessaire. Il existe très peu de
solutions sur le marché qui ont fait leurs preuves en matière de performances, de capacité et d'évolutivité à ce rythme.
Les systèmes de fichiers parallèles fournissent également des connecteurs et un support pour les systèmes de fichiers POSIX traditionnels
ainsi que des connecteurs Hadoop pour les environnements Big Data traditionnels.
Certains clients utilisent d'autres environnements distribués de type scale-out comme le Hadoop Distributed File System (HDFS), Ceph, ou
même des produits de stockage compatibles S3. Par exemple, le HDFS est conçu pour fonctionner sur du matériel standard et peut être
facilement mis à l'échelle. Le HDFS définit également les niveaux de stockage en fonction de la température des données. Les données
chaudes qui doivent être accessibles rapidement sont placées sur les disques les plus rapides, les données moins importantes étant traitées
par des disques à plus faible vitesse. Cette approche permet de construire un lac de données rentable en fonction de la criticité et des
besoins des données.
4.4 Techniques "Software-in-the-loop" et "Hardware-in-the-loop" (HIL/SIL)
Dans un rapport publié en 2016, 15 la société RAND a calculé que pour que les véhicules autonomes réduisent de 20 % le nombre de morts
sur les routes, ils doivent parcourir environ 11 milliards de miles. Avec une flotte d'environ 100 voitures, qui roulent 24 heures sur 24, 365
jours par an à une moyenne de 25 miles par heure, il faudrait 518 ans pour accomplir la tâche nécessaire. Il est clair qu'une alternative est
nécessaire.
Pour surmonter ce défi, les entreprises de conduite autonome utilisent aujourd'hui des techniques et des modèles SIL ou HIL pour accélérer
les essais.
HPE a fourni des systèmes de simulation aux entreprises automobiles dans le monde entier. Ces solutions HPE utilisent généralement le
châssis HPE Apollo 2000 Gen10 configuré avec le HPE XL170r pour la partie calcul CPU et le HPE XL190r pour le GPU.
Les flux de travail SIL personnalisés reposent sur un système de contrôle et de gestion (CMS). Le CMS prend en charge les événements
programmés en fonction du temps ainsi que les files d'attente de traitement qui seront exécutées en parallèle selon la disponibilité des
ressources.
Le fait que les systèmes SIL soient situés avec le stockage offre une plus grande flexibilité pour répondre aux besoins de bande passante
nécessaires à son exploitation optimale. L'accès aux systèmes SIL peut se faire à l'échelle mondiale pour aider les ingénieurs de différentes
régions.
15
« Driving to Safety (« Conduire en toute sécurité »), » RAND Corporation, 2016Livre blanc technique Page 10
Le Hardware-in-the-Loop (HIL) peut également être intégré dans la structure principale du data center afin de fournir un accès rapide au lac
de données. En raison des hauts niveaux de performance requis, les structures d'interconnexion à haut débit comme InfiniBand ou Intel
Omni-Path sont préférables pour une configuration HAD, le 10GbE secondaire étant disponible pour la connectivité dans le monde ainsi que
pour les solutions HIL personnalisées.
4.5 Archive et sauvegarde
La construction d'un système HAD peut nécessiter un grand nombre de véhicules d'essai, chaque véhicule générant des téraoctets de
données par jour. Il est facile de voir comment une telle flotte peut rapidement générer des centaines de pétaoctets. En même temps, une
fois les données acquises, elles doivent être nettoyées, classées et transformées pour générer différentes versions (dans différents formats)
de la même information.
En fonction de la législation et des politiques de conformité de chaque entreprise, des archives et des sauvegardes peuvent également être
nécessaires. Pour la conservation des données à long terme, HPE fournit le produit Data Management Framework (DMF), un gestionnaire de
stockage hiérarchique ayant plus de 20 ans de déploiement réussi.
HPE DMF suit automatiquement l'espace libre sur un système de fichiers géré en s'assurant que suffisamment d'espace est disponible. Cela
libère ainsi les administrateurs système des tâches fastidieuses de surveillance et de provisionnement du stockage.
HPE DMF conserve à la fois les informations sur les métadonnées et les données des versions antérieures des fichiers afin que les
administrateurs disposent d'un historique complet de l'évolution et du contenu des systèmes de fichiers et puissent revenir en arrière et
restaurer tout ou une partie d'entre eux.. Lors de la restauration, les administrateurs peuvent restaurer des systèmes de fichiers, ou des
parties de systèmes de fichiers, en utilisant une désignation à l'instant donné.
Une solution HPE DMF sur bande repose sur la bibliothèque de bandes HPE TFinity® ExaScale s'appuyant sur la technologie Spectra. Le
TFinity ExaScale est le plus grand système de stockage d'empreintes au monde.16 Un seul TFinity EE est capable de stocker jusqu'à 53 450
cartouches de bande magnétique sur 44 images. En utilisant la technologie des supports comprimés TS1150, la capacité du système
dépasse 1 exabyte. Grâce à la double robotique 17 et les 72 lecteurs LTO-8, il est possible d'atteindre des vitesses d'écriture de ~21 GB/s,
avec une capacité de 100,2 Po en passant par les 8350 chariots LTO-8 (quatre filets).
5. SERVICES ET PARTENARIATS
Avec sa part de marché de premier plan dans le domaine du calcul haute performance au niveau mondial, HPE est bien placé pour répondre
aux besoins exigeants de calcul, de stockage et de mise en réseau d'une solution HAD. Moins connus sont les services que HPE offre pour
créer des environnements de calcul haute performance et, en fin de compte, pour soutenir sa clientèle et ses utilisateurs dans le monde
entier.
5.1 Créer
L'entreprise HPE Pointnext Services, HPE Pointnext Services, crée la plateforme pour les clients depuis le data center jusqu'à la périphérie
(ici, les stations d'ingestion et les enregistreurs de données des voitures) jusqu'aux applications sur la plateforme prêtes à être utilisées par
les développeurs. En fonction des besoins et des objectifs d'un client, les experts expérimentés en IA et en données de HPE Pointnext
Services peuvent permettre aux utilisateurs de :
• Découvrir les objectifs et priorités des cas d'utilisation pour l'entreprise, les données et les informaticiens
• Identifier les fonctionnalités analytiques et d'IA qui aident à atteindre les objectifs
• Révélez les dépendances et les sources de données pour développer une stratégie de données intelligente
5.2 Exploiter
Une fois la plateforme créée, elle peut être mise en production. Exploiter en production signifie avoir le bon niveau de support opérationnel
pour tous les composants, en assurant une disponibilité optimale pour soutenir l'entreprise. Grâce aux services de support de HPE Pointnext
Services, HPE peut prendre en charge les aspects opérationnels d'un système HAD.
HPE Adaptive Management Services sont une composante intégrée des solutions HPE GreenLake, fournissant des résultats IT dans un
modèle de paiement à l'usage. Ce concept aborde les défis opérationnels à travers la phase d'exploitation des services de l'infrastructure
d'une entreprise couvrant les serveurs, le stockage, la mise en réseau, les logiciels d'infrastructure, l'hyperviseur, la sauvegarde et restauration
et la sécurité ainsi que les intergiciels et les applications tant pour HPE que pour certains actifs tiers.
16
spectralogic.com/products/tfinity-exascale/overview/
17
« TFinity® ExaScale Edition Architectural Guide (« Guide architectural TFinity® ExaScale Edition »), » Spectra Logic Corporation, 2016Livre blanc technique Page 11
5.3 Utiliser
Bénéficiez de la flexibilité du cloud public sur site, sous le contrôle de votre client avec la solution HPE GreenLake, un ensemble de solutions
informatiques basé sur la consommation. Découvrez notre catalogue de solutions informatiques complètes et adaptées à vos activités :
matériel, logiciels et expertise sur site, avec un modèle de paiement à l'utilisation.
5.4 Collaborer
Au long de ce parcours HAD, il est logique pour HPE de s'associer non seulement avec le client final, mais aussi avec d'autres entreprises
pour fournir la meilleure plateforme et le meilleur service HAD. Un exemple d'un tel partenariat serait la transmission de données pour des
cas d'essai sur des tests de conduite à distance. La largeur de bande disponible sur un site d'essai peut entraver le téléchargement de
données. En nous associant à un service de messagerie, nous pouvons faire en sorte que les données soient livrées au point d'ingestion
viable le plus proche dans les meilleurs délais.
Les partenariats peuvent également prendre d'autres formes. Un client a peut-être déjà un prestataire de services IT et souhaite que la
plateforme HAD soit gérée par la même entreprise. Peut-être que nos clients veulent que HPE travaille avec ces prestataires de services
pour s'assurer que la transition de la création à l'exploitation se fasse aussi facilement et paisiblement que possible. Grâce à la collaboration
avec les prestataires de services, HPE peut garantir au client final que les services de création et d'exploitation constituent un mélange entre
HPE et d'autres. Chaque partenaire apporte ses propres services à l'écosystème et fournit une prestation de A à Z au client.
6. CONCLUSION
Environ 1,35 million de personnes meurent chaque année des suites d'accidents de la route. Les accidents de la route coûtent à la plupart
des pays 3 % de leur produit intérieur brut. Entre 20 et 50 millions de personnes souffrent de blessures non mortelles, dont beaucoup sont
handicapées à la suite de leur blessure. 18
La conduite hautement autonome est un marché en pleine croissance qui a pour mission d'améliorer la santé et la sécurité publiques. On
estime que, pour des taux de pénétration AV de 10 %, 50 % et 90 %, on peut s'attendre à ce que 1 100, 9 600 et 21 700 vies soient sauvées
chaque année aux États-Unis.19
Cependant, le HAD représente un véritable enjeu. En effet, il requiert certaines des technologies les plus avancées et les plus sophistiquées
du marché actuel, parmi lesquelles figurent l'apprentissage automatique et les réseaux neuronaux à apprentissage en profondeur, le calcul
accéléré de pointe, les réseaux à large bande passante et les structures d'interconnexion.
HPE répond au besoin de l'industrie automobile d'un portefeuille complet de solutions HPC et IA qui peuvent fournir un déploiement HAD
de la périphérie vers le cloud qu'un client peut acheter et exploiter lui-même ou peut contracter avec HPE (via HPE Pointnext Services,
HPE GreenLake et d'autres offres de services) pour faire fonctionner tout ou partie des environnements de calcul HAD pour eux. Le
portefeuille complet de performances de HPE en matière de calcul, de stockage, de mise en réseau et de support et services mondiaux
garantit que les développeurs d'aujourd'hui peuvent créer les solutions HAD optimales pour les réseaux de transport solides et sûrs de
demain.
EN SAVOIR PLUS
hpe.com/ai
Suivez-nous
Facebook : facebook.com/HPEAI/
Twitter : HPE AI - @HPE_AI
LinkedIn : linkedin.com/showcase/hpe-ai/
18
« Road traffic injuries (« Accidents de la route »), » Organisation mondiale de la santé, 2018
19
Commission européenne, Véhicules autonomes et sécurité routière, Commission européenne, Direction générale des transports, février 2018Livre blanc technique
Check if the document is available
in the language of your choice.
Faites le bon achat.
Contactez nos spécialistes.
Partagez maintenant
Mises à jour
© Copyright 2020 Hewlett Packard Enterprise Development LP. Les informations contenues dans ce document sont sujettes à
modification sans préavis. Les seules garanties relatives aux produits et services Hewlett Packard Enterprise sont stipulées dans
les déclarations de garantie expresse accompagnant ces produits et services. Aucune déclaration contenue dans le présent
document ne peut être interprétée comme constituant une garantie supplémentaire. Hewlett Packard Enterprise décline toute
responsabilité en cas d'erreurs ou d'omissions de nature technique ou rédactionnelle dans le présent document.
Google est une marque commerciale de Google LLC. Intel est une marque d'Intel Corporation aux États-Unis et dans d'autres
pays. Toutes les marques tierces sont la propriété de leurs propriétaires respectifs.
a00091772FRE, Octobre 2020Vous pouvez aussi lire