Facteurs humains et technologies - Réalité Virtuelle et Interactions - Année 2019 - 2020 / APP5 Info à Polytech Paris-Sud - Lri.fr
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Réalité Virtuelle et Interactions
Facteurs humains et technologies
Année 2019 - 2020 / APP5 Info à Polytech Paris-Sud
Cédric Fleury (cedric.fleury@lri.fr)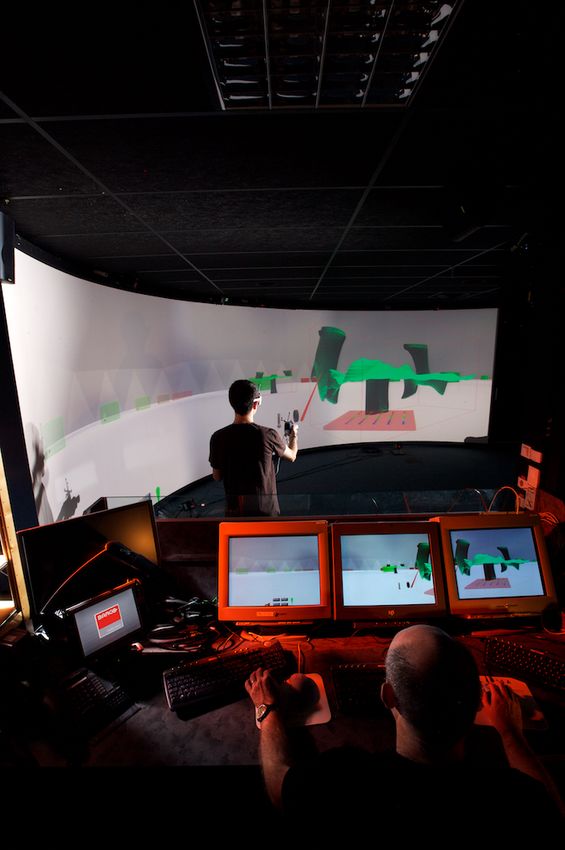
PLAN Facteurs humains Technologies utilisées

PLAN Facteurs humains Technologies utilisées

PERCEPTION HUMAINE 5 sens classiques Goût Toucher Ouïe Odorat Vue + les capteurs internes du corps Système vestibulaire Mécanorécepteurs musculaires et articulaires

PERFORMANCE VISUELLE Large champ visuel Bonne acuité visuelle Capacité à distinguer deux points rapprochés de l’espace
PERFORMANCE VISUELLE Bonne vision des couleurs 200 nuances colorés entre 380 et 780 nm + saturation (degrée de pureté) et brillance (intensité) => environ 1.000.000 nuances différentes

PERFORMANCE VISUELLE Mauvaise discrimination temporelle Relativement mauvaise : entre 4 et 5 ms

PERFORMANCE VISUELLE Bonne vision de la profondeur Distinguer une différence de profondeur de 0.5mm à 1m Distinguer une différence de profondeur de 10cm à 10m La profondeur est perçue grâce A la disparité rétinienne (différence entre les deux yeux) A l’accommodation (mise au point d’oeil) A la parallaxe :
PERCEPTION AUDITIVE
Onde sonore : variations de pression
Vibration comprise entre 20Hz et 20kHz
Intensité = amplitude de la variation
Mesuré souvent en décibel
10dB : murmure - 130dB : douleur
Perception dans l’espace
Différence entre les 2 oreilles
Déformation du à la tête et oreilles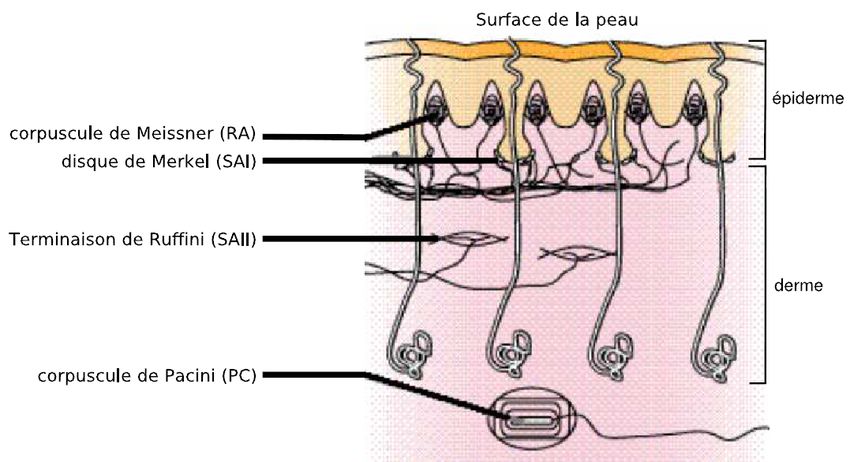
PERCEPTION HAPTIQUE Toucher Différents récepteurs sous la peau Pression, vibration, température, etc. Différentes sensibilités selon les parties du corps
PERCEPTION HAPTIQUE
Perception proprioceptive
Sensation issue du corps
Mécanorécepteurs internes
Positions, mouvements, forces
Effet de la gravité et des accélérations
Système vestibulaireCYBER-SICKNESS Mal des simulateurs Maux de tête Fatigue oculaire Stress Confusion Nausées
QU’EST CE QUI INDUIT LE
« CYBER-SICKNESS »
?CYBER-SICKNESS
Désynchronisation entre les retours sensoriels
Entre la vue et le système vestibulaire (motion-sickness)
Latence
Délai entre l’action de l’utilisateur et les retours sensoriels
Différents niveaux de latence
Acquisition des actions des utilisateurs
Traitement de ces actions
Calcul des restitutions sensorielles
Retours vers l’utilisateurLATENCE Niveaux de la latence 7 à 10 ms : réflexe vestibulo-occulaire 30 ms : minimum mesurable 100 ms : seuil de perception de l’humain (vision) 200 ms : limite du confort pour les mouvements de la tête (au-dessus risque de cybersickness) 250 ms : seuil de gène lors du contrôle manuel 300 ms : limite du supportable pour l’interaction
LATENCE Autres conséquences Erreur de localisation spatiale Problèmes de stabilité et précision des mouvements Vitesse des mouvements Fatigue
COMMENT RÉDUIRE LA LATENCE ? Augmenter la puissance de calcul et la vitesse de transmission des données Paralléliser les processus de traitements Augmenter la fréquence des images 60 Hz nécessaire pour une interaction fluide En prédisant le comportement de l’utilisateur Filtre de Kalmann, dead reckoning, prédicateur adaptatif, modèle, etc.
PEUT-ON S’ADAPTER À LA
LATENCE
?LATENCE
Peut-on s’adapter à la latence ?
Oui : l’humain peut ralentir
Mais, pire que la latence, le jitter !
Variance de la latence
Jitter important impossible de prévoir la latencePLAN Facteurs humains Technologies utilisées
TECHNOLOGIE DE LA RV Restitution multi-sensorielle : 5 sens Visuelle, auditive, haptique, olfactive, gustative Périphériques d’interaction Émergence de dispositifs « low cost »
RESTITUTION VISUELLE Indispensable à toute application de RV Critère de l’immersion visuelle Large champ de vision Vision stéréoscopique Haute résolution Immersion du regard l’utilisateur
VISIOCASQUE Head Mounted Display (HMD) Petits écrans très prés des yeux Tubes cathodiques + miroirs LCD maintenant Nécessite de tracker la position de l’utilisateur Avantages Immersion totale du regard, peu encombrant, prix Inconvénients Faible résolution, faible champs de vision, cybersickness
CAVE, SALLE IMMERSIVE 4 à 6 faces, projection par l’avant ou l’arrière Nécessite un dispositif pour la vision stéréo Nécessite de tracker l’utilisateur
CAVE, SALLE IMMERSIVE Avantages : Bonne résolution Bonne immersion du regard Inconvénient : 1 seul utilisateur (éventuellement 2) Espace de déplacement restreint Complexe et couteux
AUTRES DISPOSITIFS IMMERSIFS Mur d’images Workbench Bureau immersif
COMMENT EST GÉNÉRÉE LA
PERCEPTION DE PROFONDEUR
(VUE 3D)
?VISION STÉRÉOSCOPIQUE Disparité entre les images de chaque œil 1 image différente pour chaque œil Dépends de la distance interoculaire
COMMENT PEUT AFFICHER
DES IMAGES DIFFÉRENTES
POUR CHAQUE OEIL
?VISION STÉRÉOSCOPIQUE Envoyer une image différente à chaque œil Déjà prévu dans les HMDs Plus compliqué avec des écrans ou des projecteurs Séparation en fréquence Séparation par polarisation Séparation par anaglyphe Ecrans auto-stéréoscopiques
VISION STÉRÉOSCOPIQUE
Séparation en fréquence
Ecrans ou projeteurs à 120 Hz
Lunettes à obturations (actives, Shutter glasses)
Obturateur LCD
Nécessite une synchronisation
Infrarouge ou radio-fréquenceVISION STÉRÉOSCOPIQUE
Séparation par polarisation
Souvent polarisation circulaire
Avantages
Lunettes plus légères
Moins chères
Inconvénients
Dégrade un peu les couleurs
FantômesVISION STÉRÉOSCOPIQUE Séparation par anaglyphe Peu utilisée en RV Dégrade beaucoup les couleurs
VISION STÉRÉOSCOPIQUE Ecrans auto-stéréoscopique Pas besoin de lunettes 2 techniques Barrière de parallaxe Réseau lenticulaire Nombres de vues prédéfinies Affiche 8 vues = 16 images affichées en même temps Ne convient pas pour l’interaction
VISION STÉRÉOSCOPIQUE Correction des parallaxes (écrans et projecteurs)
VISION STÉRÉOSCOPIQUE
Correction des parallaxes (écrans et projecteurs)
Nécessité de tracker la tête de
l’utilisateur
Déformation de la
pyramide de vue
Images
spécifiques
à chaque
utilisateur
VidéoCORRECTION DES PARALLAXES
SYSTÈME DE TRACKING
Capteur la position et l’orientation d’une cible
Techniques utilisées
Mécanique (articulé, filaire, etc.)
Capteurs électromagnétiques
Cameras infrarouges
Centrale inertielle
Gyroscope
Accéléromètre
MagnétomètreVISION STÉRÉOSCOPIQUE
Accommodation
En réel
Accommodation = convergence
En vision stéréo
Accommodation sur l’écran
!= convergence due à la disparité
Pas encore de solution en RV
Ajout de flou
Là ou l’on veut que l’utilisateur regard (film Avatar)
Là ou l’utilisateur regarde (eye tracking ou prédiction)RESTITUTION AUDITIVE
Buts
Reproduire le bruit des objets virtuels
Aider l’utilisateur lors des interactions
2 méthodes pour la spatialisation
Différence de sons entre les deux oreilles
Haut-parleurs ou casques
Nécessite de connaitre la position de l’utilisateur
Reconstruction de l’environnement sonore
De façon physiquement réaliste
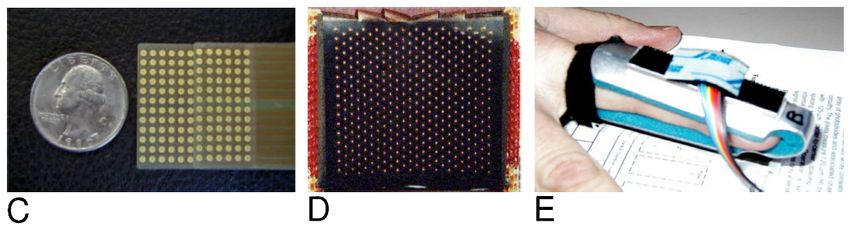
Dispositif complexe et ressources de calcul importantesRESTITUTION HAPTIQUE
Retours tactiles
Sensation de toucher les objets virtuels
Techniques utilisées
Interfaces tangibles
Stimulations vibratoires
(UIST 2013)
Stimulations électriquesRESTITUTION HAPTIQUE
Retours proprioceptifs
Proprioceptif : sensation issue du corps
Positions, mouvements, forces
Retours de forces
Bras à retour d’efforts
Exo-squelette
SpidarRESTITUTION HAPTIQUE
Retours proprioceptifs
Interfaces de locomotion : recrée les
sensations d’un déplacement naturel
Métaphores du poste de conduite
Voiture, vélo
Métaphore de la marche
Tapis roulant, etc.
Métaphore abstraite
Joyman, etc.RESTITUTION HAPTIQUE
RESTITUTION HAPTIQUE
RESTITUTION HAPTIQUE
RESTITUTION HAPTIQUE
Retours proprioceptifs
Recréer l’effet de la gravité et
des accélérations
Plateformes mobiles
Stimulation galvanique
vestibulaire (GVS)
Génération d’un champs
électromagnétique
au niveau de
l’oreille interne
Limite le cybersicknessRESTITUTION HAPTIQUE
Retours pseudo-haptiques
Générer une sensation haptique à partir d’un décalage
entre l’action de l’utilisateur et le retour (visuel ou autre)
qu’il reçoit.
https://team.inria.fr/hybrid/w3d-project/RESTITUTION OLFACTIVE 2 techniques Diffuseurs devant le nez Canon à odeurs Problèmes Diffusion Persistance
RESTITUTION GUSTATIVE The University of Tokyo / Takuji Narumi
RESTITUTION GUSTATIVE The University of Tokyo / Takuji Narumi
PÉRIPHÉRIQUES D’INTERACTION Périphériques 3D (6DoF) Souris 3D, Joysticks, manettes, etc. Périphérique haptique Bras à retour d’effort, exo-squelettes, etc. Système de tracking Interagir avec les gestes et les déplacements Périphériques spécifiques Gants de données, interfaces tangibles, etc.
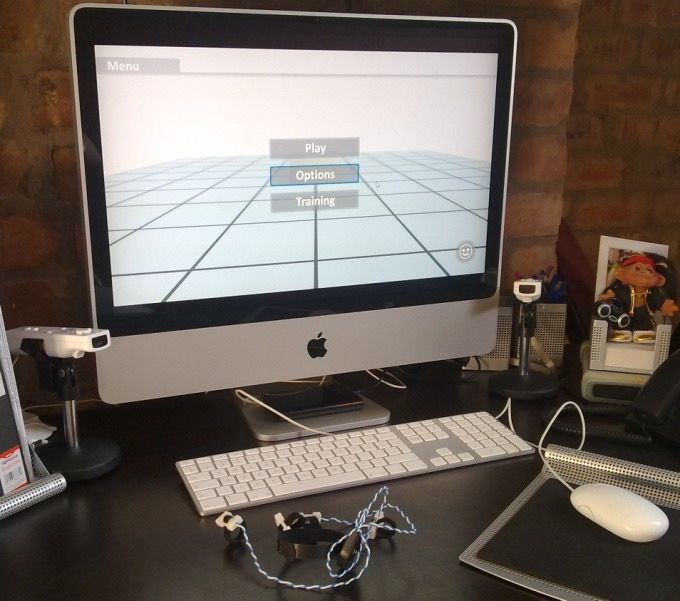
DISPOSITIFS « LOW COST » Dispositifs de visualisation TV 3D (
DISPOSITIFS « LOW COST » Nouveaux périphériques d’interaction Capteurs de profondeur Kinect de Microsoft, Creative Senz3D, Structure Sensor Capteurs magnétiques Razor Hydra Cameras infrarouges Wiimote Cameras normales Leapmotion
DISPOSITIFS « LOW COST »
Exemples d’utilisation
Tracking de l’utilisateur
Kinect, Wiimote, Razor Hydra
Interactions gestuelles
Kinect, Leapmotion
Reconstruction 3D
Kinect, structure Sensor
Augmentation de l’immersion
IllumiRoom de Microsfot (projecteur + Kinect)DISPOSITIFS « LOW COST »
DISPOSITIFS « LOW COST »
DISPOSITIFS « LOW COST »
DISPOSITIFS « LOW COST »
DISPOSITIFS « LOW COST »
Vous pouvez aussi lire