La robotique en milieu naturel - De nouvelles approches pour l'agriculture 05/12/2019 - Wedia
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

La robotique en milieu naturel De nouvelles approches pour l’agriculture #3RDF2019 05/12/2019

Eléments de contexte
La nécessaire mutation de l’agriculture
Impact sur l’environnement Garantir un la production
Réduction des intrants Population mondiale croissante
Détérioration des sols Surface agraire limitée
De nouvelles méthodes
de productions agricoles
Exposition aux risques Attractivité des métiers
Produits phytosanitaires Pénibilité du travail
Utilisation de machines imposantes Main d’œuvre en crise
Conditions d’évolution difficiles Rentabilité économique
Nouvelles semences Agriculture de précision Agroécologie Agriculture urbaine
Nouveaux produits
Besoin d’accroître la fréquence et la précision des travaux
Roland LENAIN .2
#3RDF2019 05/12/2019
La robotique en agriculture
Automatisation des machines et outils
Case Magnum
Tracteurs robotisables
Tracteurs autonomes
Kubota
Outils automatisés
GarFord
Roland LENAIN .3
#3RDF2019 05/12/2019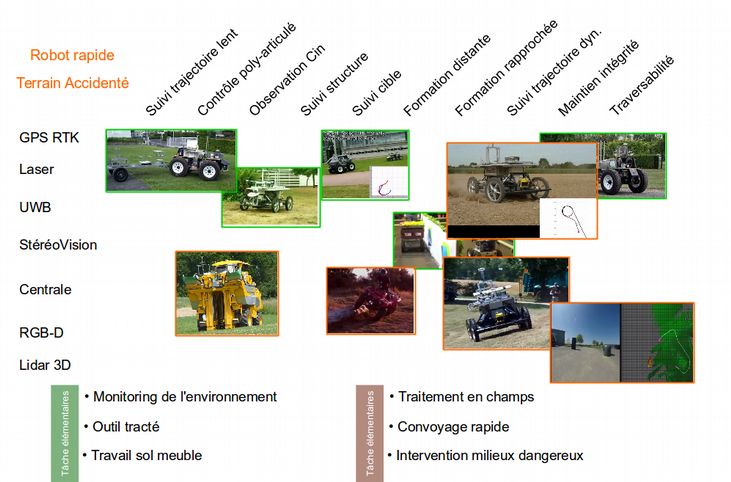
La robotique en agriculture
Des petits robots élémentaires
Ecorobotix
Désherbage mécanique
Limitation intrants
Dino
Robot tonte
VitiRover
Roland LENAIN .4
#3RDF2019 05/12/2019
La robotique en agriculture
Vers des robots modulaires en test
Centéol
Robot porte outil
Evaluation sur les cultures
PumAgri
Robot pulvérisation
Roland LENAIN .5
#3RDF2019 05/12/2019
Contexte et enjeux
Un contexte dynamique et incertain
Variabilité des conditions d'évolution
Types et propriétés des sols
Géométries du terrain
Conditions météos
Environnement
Variabilité des tâches à réaliser
Structuration de l'environnement & densité
Charges et outils à embarquer
Interaction avec le sol/la végétation
Interaction avec les opérateurs
Vitesse de travail
Besoin de reconfigurer un système robotique au contexte et à la tâche
Roland LENAIN .6
#3RDF2019 05/12/2019
Quelques verrous persistants
Garantir la
répétabilité
Appréhender la diversité des contextes
Perception de
l’environnement Adaptation
comportement
Interprétation scène
Analyse traversabilité
Stabilité
Maintenir l’intégrité et la sûreté Contrôlabilité
Traficabilité Gestion des Préhension
redondances
Conception
Nouveaux outils
Gestion interaction avec corps mous/flex
Irrégularité sol
Prise en main Supervision
Coordination
Commande en
formation
Interfaces & Coopération robots+Hommes
dialogues
Roland LENAIN .7
#3RDF2019 05/12/2019
Comportements élémentaires
Diversité des contextes
Travaux agricoles Conditions mobilité Perception environnement
Type de tâches Adhérence Structuration environnement
Culture Géométrie du sol Perturbation (luminosité/poussière)
Pour réaliser plusieurs scénarios
Développement de comportements types
- M1 : Suivi de rang à (a) basse vitesse (b) haute vitesse
- M2 : Manœuvre de changement de rang - P1 : GPS Cinématique
- M3 : Maintien de stabilité - P2 : Caméra classique
- M4 : Analyse de traversabilité et passage d'obstacle - P3 : Caméra RGB-D
- M5 : Adaptation des propriétés des suspensions - P4 : VeloDyne (Lidar 3D)
- M6 : Suivi de trajectoire absolue à haute vitesse sur terrain structuré - P5 : Laser (1 nappe)
- M7 : Adaptation des commandes aux besoins de perception - P6 : Centrale inertielle (toujours OK)
- M8 : Suivi de cible mouvante - P7 : Bumper (toujours OK)
- M9 : Association robots - P8 : UWB (coop)
Roland LENAIN .8
#3RDF2019 05/12/2019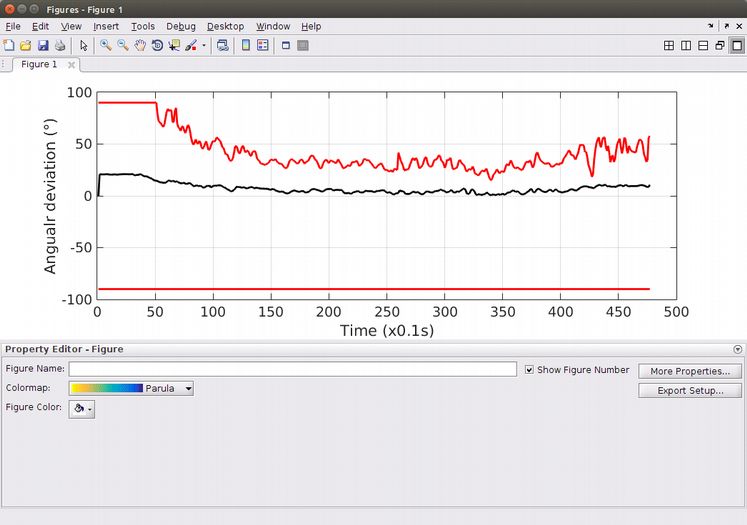
e
βF
Comportements élémentaires
y
F
δF
R F
y βR ~θ
v
δR
Suivi de trajectoire R
L
1
Approche générique avec localisation absolue c (s )
α
O
Commandes adaptative et prédictive Modèle cinématique + Modèle dynamique
Changement de stratégie en fonction de la vitesse Nouvelles approches d'observation et de commande
Ecart latéral Calcul orientation Ecart Calcul vitesse lacet Erreur Calcul angle
avant Cible + angle arrière Angulaire cible lacet de braquage avant
De 3 à 20 km/H
Sol peu adhérent
Variation géométrie sol
Roland LENAIN .9
#3RDF2019 05/12/2019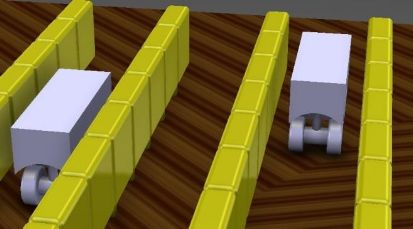
Comportements élémentaires
Suivi de contour
Baudet Rob 2012-2015
Suivi de cible (véhicule ou homme)
Maturation 2016-2019
Perception par Laser
Pas de communication
Tracking direct
Roland LENAIN .10
#3RDF2019 05/12/2019Comportements élémentaires
Suivi de contour
Estimation par laser 1D horizontal
Filtrage des points
Détermination d'ensemble de points
Estimation des formes
Génération de trajectoires
Découplage vitesse angulaire/linéaire
Impact Laser Regroupement Barycentres Points
Ajout points robots Ralliement par bézier
de points d'intérêts
Calcul de l'orientation apparente désirée
Calcul moindre carré
Pour rallier la trajectoire local d'ordre 2 borné
Au bout d'une certaine distance Déduction du braquage avant
2 WS
Eventuellement sur des infos prédites En fonction de la vitesse d'avance
À partir de la vitesse de lacet cible
Calcul de la vitesse de lacet pour atteindre la consigne
Calcul du braquage arrière
En temporelle
4 WS
Maintenir une orientation réelle
Sans considérer la vitesse d'avance Nulle si peu d'erreur
Égale à l'orientation cible sinon
Roland LENAIN .11
#3RDF2019 05/12/2019Comportements élémentaires
Suivi de contour
Structure végétale
Feuillage clairsemé
Vitesse de 1m/s
Différente distance désirée
Roland LENAIN .12
#3RDF2019 05/12/2019Notion de traversabilité
De la prédiction à la traversabilité
Calcul des
Processus réactifs et prédictifs Positions possibles MNT
profils de vitesse
Choix des consignes
Extrapolation par rapport à l'environnement
vitesse
Choix de la “meilleure” trajectoire (et vitesse) Trajectoire à suivre Lois de commande
braquage
Roland LENAIN .13
#3RDF2019 05/12/2019Systèmes robotiques reconfigurables
Capacité à reconfigurer la forme des robots
Besoin et cahier des charges
Application privilégiée
Requérant plusieurs degré de mobilité
Roues motrices et directrices Voie (+ empattement) variables
Suspensions actives Charge utile 200kg
Garde au sol et inclinaison variables Vitesse → 30 km/H
Génération de concepts
Différentes solutions envisagées
Difficultés liées à un châssis unique
Coût Complexité Maintenance Fragilité
D'un robot à un système robotique reconfigurable
Conception de robots jumeaux
Associable en fonction des tâches/terrain
Roland LENAIN .14
#3RDF2019 05/12/2019Lateral error
Comportements élémentaires Y1. Yaw objective
(on distance)
Coopération/Association de robots δ
θ̃ Y2. Yaw regulation
Contrôle rapproché par UWB (time)
sL Longitudinal error
x
Déplacement un robot par Mx (M8->Baudet-Rob) y
Estimation pose relative par UWB (brevet) Longitudinal X1. Speed X2. Vel. Regulation
position observer (time)
Contrôle indépendant latéral longitudinal
Observation de la vitesse relative
Roland LENAIN .15
#3RDF2019 05/12/2019Vers de nouveaux concepts
Diversité des situations et des travaux
Difficile à réaliser par un unique robot
Association de robots
Reconfiguration mécanique
Reconfiguration algorithmique
Plusieurs modes
De la mobilité à l'interaction avec des outils
Conception de nouvelles méthodologies de production
Nouveaux outils associables
Nouveaux procédés (Biocontrôle, ...)
Sélection des modes et du nombre de robots
Utilisabilité par les opérateurs
Modalités d'interaction avec l'Homme Du développement à la réponse aux besoins sociétaux
Autonomie partagée et travail collaboratif Normalisation ?
Supervision humaine Exploitation industrielle ?
Roland LENAIN .16
#3RDF2019 05/12/2019Quelques questions sociétales
Applicabilité de la robotique
Coûts des engins Utilisabilité
Acceptabilité Maintenance
Impact sur l’agriculture
Evolution des pratiques Organisation du travail
Conditions de commercialisation
Garantie de sécurité Essais et certification
Evaluation performances Mise à jour
Interopérabilité et standard Législation
Roland LENAIN .17
#3RDF2019 05/12/2019L’association RobAgri
Activités pour la structuration d’une nouvelle filière
Cartographie besoins/verrous/compétences
Scientifiques
Forge commune Journée scientifique
Rédaction livre blanc
→ Fira 2019 – 11/12/2019
PF simulation
Analyse SdF
Technologiques Infrastructure esais
Processus évaluation
Actions structurantes
Rose SolRob A – FranceAgrimer DIH AgROBOFood
Roland LENAIN .18
#3RDF2019 05/12/2019La robotique agricole
Une filière innovante en structuration
De premières solutions commerciales
Des verrous scientifiques
Plusieurs initiatives
de structurations
nouveaux projet
Opportunités de
Des avancées technologiques
Des défis sociétaux
Des évolutions législatives
SolRob – A → B
Roland LENAIN .19
#3RDF2019 05/12/2019Vous pouvez aussi lire