Les systèmes d'aide à la conduite (ADAS) et les méthodes de validation/homologation de leurs performances - AQTr
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Les systèmes d’aide à la conduite (ADAS) et les méthodes
de validation/homologation de leurs performances
Forum sur les véhicules automatisés
Farid Bounini1, Denis Gingras2
1 Post doctorant au Laboratoire Intelligence Véhiculaire (LIV)
à l’Université de Sherbrooke
2 Dr Ing. professeur et directeur du LIV à l’Université de Sherbrooke
Montréal, 25 octobre 2018
Contact: farid.bounini@usherbrooke.ca 1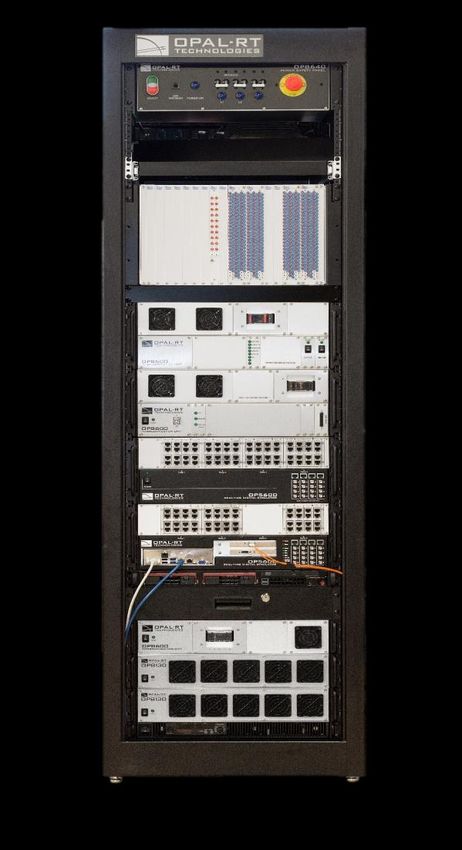
Sommaire
• Introduction
• Systèmes d’aide à la conduite (ADAS)
• Niveaux de la conduite automatisée
• Zones de couverture pour les différentes ADAS
• Problématique et défis
• Cycle de développement des ADAS et de niveaux de l’AD (cycle en V)
• Moyens de test et de validation des ADAS
• Conclusion
Contact: farid.bounini@usherbrooke.ca 2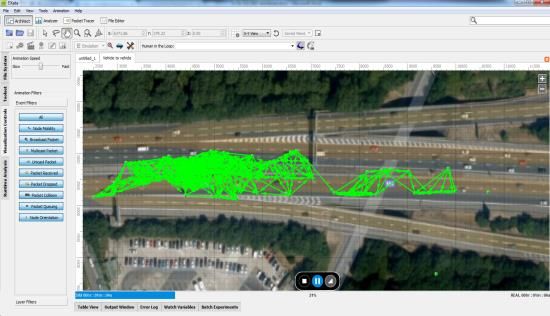
Mise en contexte : Systèmes d’aide à la conduite
• Les innovations véhiculaires visent à :
o renforcer la sécurité active
o améliorer le confort du conducteur
o réduire le trafic routier
• Systèmes d’aide à la conduite (ADAS) :
o Système d’aide au contrôle latéral
Régulateur de vitesse intelligent
o
Niveaux de la conduite automatisée
o Système d’aide au stationnement
o Etc.
Contact: farid.bounini@usherbrooke.ca 3
Contexte : Niveaux de la conduite automatisée (SAE)
Surveillance non requise Conduite sans
conducteur
Surveillance requise Contrôle non requis humain
Surveillance requise
Contrôle non requis
Contrôle requis
Figure 2 : Niveaux de la conduite automatisée (SAE, septembre 2016)
Contact: farid.bounini@usherbrooke.ca 4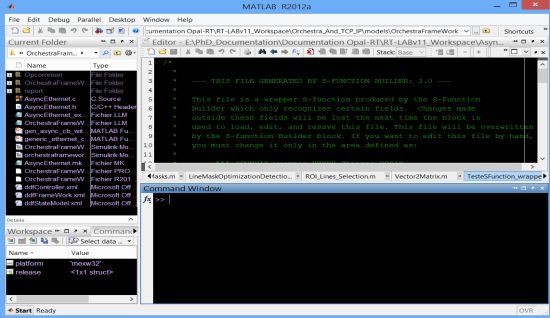
Zones de couverture pour les différentes ADAS
Anticollision au niveau des
Angles morts à couvrir intersections
Anticollision latérale
Alerte de Anticollision
collisions
arrière frontale
Aide au
stationnement
Changements
de voie et Recul et Régulateur de vitesse intelligent (ACC)
dépassement stationnement
des véhicules
Stop and Go
Alerte de Anticollision
collisions
arrière Anticollision latérale frontale
Angles morts à couvrir Anticollision au niveau des
intersections
Figure 3 : Zones de couverture pour les différentes applications automobiles [1]
[1] Panagiotis Lytrivis, George Thomaidis, Angelos AmditisNada Milisavljević "Sensor and Data Fusion, chapiter 7: Sensor Data Fusion in Automotive Applications." Published by In-Teh, Croatia, February 2009, InTech, DOI: 10.5772/6574.
Contact: farid.bounini@usherbrooke.ca 5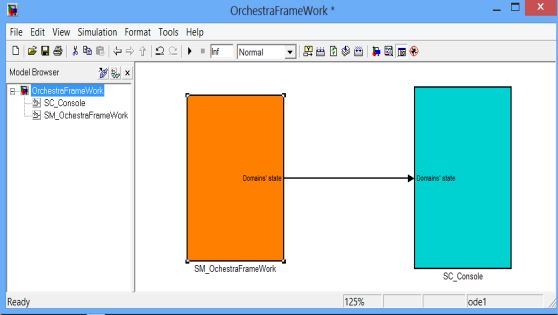
Problématique :
• Valider les stratégies et les concepts des niveaux de l’AD :
o Tests et validation des ADAS
o Détection des défauts des ADAS
o Dégâts matériels et humains
• Réduction des coûts de développement des nouveaux produits :
o Durée du développement
o Matériels et infrastructures
o Scénarios de tests et de validation
• Respect des exigences et des normes de sécurité
Contact: farid.bounini@usherbrooke.ca 6Cycle de développement des ADAS et des niveaux de l’AD (en V)
MIL xIL
véhicule véhicule Validation du
Spécifications du
véhicule véhicule
MIL xIL
Spécifications systèmes systèmes Validation des
des systèmes systèmes
MIL xIL
Spécifications composantes composantes Validation des
des composantes composantes
Développement des
composantes
Figure 4 : Nouveau cycle de développement des ADAS et des niveaux de la conduite automatisée [2]
[2] Nidhi Kalra, Susan M. Paddock “How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability?” RAND Corporation, Document Number: RR-1478-RC, 2016.”
Contact: farid.bounini@usherbrooke.ca 7Moyens de tests et de validation des ADAS et des véhicules intelligents /
autonomes et connectés (VIAC)
Moyens de tests et de validation des ADAS et des VIAC
Routes
Pistes
Simulation conventionne
d'essais
lles
Figure 5: Moyens de tests et de validation des ADAS et des VIAC
Contact: farid.bounini@usherbrooke.ca 8Chaine de tests et de validation des ADAS et des VIAC
Cahier des charges des
ADAS et des VIAC
Modélisation et simulation
Non
Performances
Oui
Pistes d'essais
Non
Performances
Oui
Routes conventionnelles
Figure 6: Chaine de tests et de validation des ADAS et VIAC
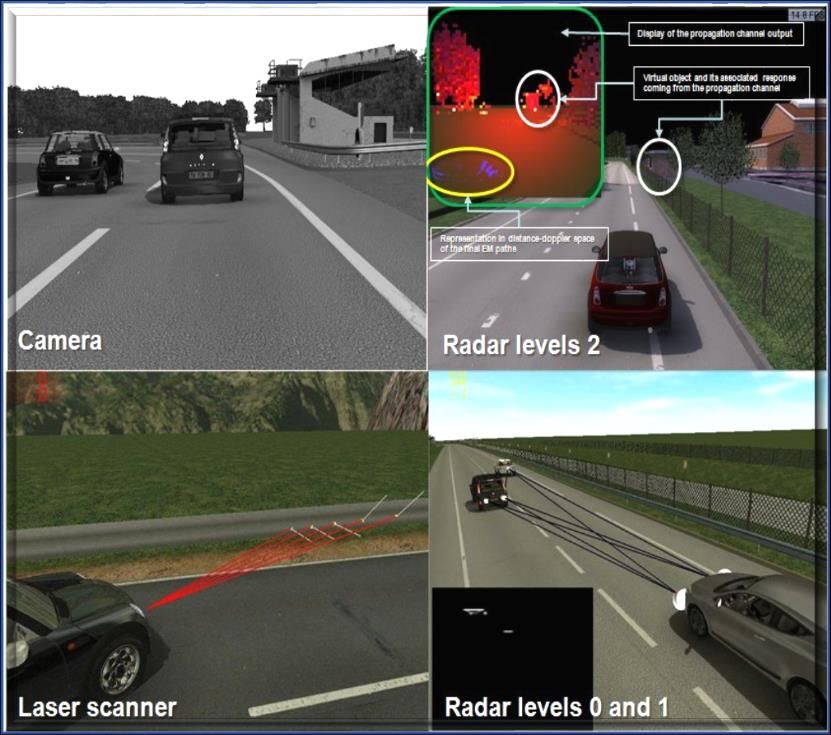
Contact: farid.bounini@usherbrooke.ca 9Architecture de la plateforme de la co-simulation, de test et de validation des ADAS
Simulateur virtuel (Pro-SiVIC,
PresCan, SCANeR, CarMaker Plateformes d’OPAL-RT
[…] )
Envoi des données des Cœur 1 Cœur 2 Cœur M
capteurs vers les Véhicule Véhicule Véhicule
1 2 M
plateformes d’OPAL-RT
Canal de communication
Cœur N Cœur M+2 Cœur M+1
Envoi des signaux de Véhicule Véhicule Véhicule
contrôle aux véhicules N M+2 M+1
simulateur virtuel
Figure 7 : Architecture de la plateforme de la co-simulation, de test et de validation des ADAS et des VIAC [3]
[3] BOUNINI F., GINGRAS D., LAPOINTE V., GRUYER D., "Real-time simulator of collaborative autonomous vehicles", IEEE Int. Conf. on Advances in Computing, Comm. and
Informatics ICACCI, Greater Noida, India, pp. 723 - 729, September 2014.
Contact: farid.bounini@usherbrooke.ca 10Composantes de la plateforme de la co-simulation Plateformes
MATLAB Simulink Visual studio C/C++ d’OPAL-RT
OrchestraTM Data Bus dll & S-Function
TCP/UDP/IP
PreScan EXata Pro-SiVIC
Figure 8: Plateforme de simulation des ADAS et de l’AD [4]
[4] BOUNINI Farid « Simulateur Temps-réel De Véhicules Intelligents Et Autonomes En Conduite Collaborative », Université de Sherbrooke, 2018.
Contact: farid.bounini@usherbrooke.ca 11Centres d'essais
• Amérique du Nord :
o PMG Technologies : Centre d’essais et de recherche, Blainville, QC, Canada.
o Centre Américain pour la Mobilité « en : American Center For Mobility », Ypsilanti, Michigan, États-
Unis.
o ALMONO : La ville artificielle d’Uber, Pittsburgh, États-Unis.
o Terrains d’essais de Honda, Californie, États-Unis.
• Europe
o Daimler: Centre de test et de technologie, Allemagne.
o UTAC-CERAM : Centre d’essais et de recherche, Essonne, Oise, France.
o HORIBA MIRA : Conseil en ingénierie et développement automobile, Warwickshire, Royaume-Uni.
o Site de test à Gothenburg, Suède.
Contact: farid.bounini@usherbrooke.ca 12Conclusion
• Moyens de tests et de validation des performances des ADAS et des véhicules
intelligents et connectés.
• Distances à parcourir par les véhicules autonomes très importantes, dans l’ordre d’une
centaines de millions de kilomètres.
• Les flottes de véhicules intelligents existantes prendraient des dizaines et voire des
centaines d'années à parcourir ces kilomètres, solution NON envisageable.
• Simulation en temps réel / accélérée pour passer les tests de validation des ADAS et
des différents niveaux de l’AD.
• Réglementations adaptatives évoluant avec la technologie des véhicules intelligents et
connectés.
Contact: farid.bounini@usherbrooke.ca 13Merci de votre attention
Questions!
Contact: farid.bounini@usherbrooke.ca 14Références
1. Nidhi Kalra, Susan M. Paddock “How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle
Reliability?” RAND Corporation, Document Number: RR-1478-RC, 2016.
2. U.S. Department of Transportation web site “Automated Vehicles / USDOT Automated Vehicles Activities”, May 18,
2018, https://www.transportation.gov/AV
3. Jeff Swensen “Here are the first 10 official U.S. proving grounds for autonomous vehicle testing” Techcrunch, Jan 19,
2017 https://techcrunch.com/2017/01/19/here-are-the-first-10-official-u-s-proving-grounds-for-autonomous-vehicle-
testing/
Contact: farid.bounini@usherbrooke.ca 15Vous pouvez aussi lire