Les systèmes de référence terrestre - CNIG
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
GÉODÉSIE
Les systèmes de référence terrestre
et leurs réalisations
Cas des territoires français
Françoise DUQUENNE
La Terre est un objet en mouvement dans l’espace, dont MOTS-CLÉS • d es mouvements périodiques
la forme est complexe et la surface mobile. L’objectif des comme les marées terrestres
Système de référence
géodésiens a été de tout temps de définir des “systèmes de terrestre, réalisation, (
L’ellipsoïde de révolution est entière- Ces coordonnées sont couramment utili- mesures sur des ondes électromagné-
ment défini par deux paramètres (a, b), sées pour le positionnement, mais aussi tiques, mesure de temps, de délai, de
(a, f), (a, e), etc. avec : pour la cartographie où elles sont trans- phase, de Doppler, etc.
formées en coordonnées planes par une Les traitements permettent d’attribuer
l’aplatissement :
représentation plane de l’ellipsoïde. des coordonnées tridimensionnelles
XYZ et l’origine du repère est très
l’excentricité :
proche du centre des masses de la terre
Réalisation d’un SRT (de quelques cm à quelques mm).
Le méridien du point M est le plan qui
ou repère de référence Le RRT peut s’appliquer à la Terre
contient l’axe OZ et la normale à l’ellip-
soïde contenant M.
terrestre (RRT) entière et l’ellipsoïde est global.
C’est en utilisant les coordonnées de
Il existe de nombreux ellipsoïdes dont Un SRT est défini par un ensemble
ces points géodésiques dans le RRT que
les dimensions peuvent diverger de d’informations (hypothèses, modèles,
l’utilisateur peut lui-même se position-
plusieurs centaines de mètres, mais constantes, algorithmes) qui permettent
ner, soit en allant stationner ces points,
les plus répandus actuellement sont le de faire une réalisation numérique à
soit en utilisant des stations GNSS
GRS80 et le WGS 84 dont les dimen- partir de mesures.
permanentes. En se positionnant par
sions sont identiques à mieux que le La réalisation d’un SRT s’opère par
GNSS, il peut aussi se positionner via
millimètre. des mesures à la surface de la terre,
les éphémérides des satellites GNSS
des traitements qui permettront d’at-
dans le RRT dans lequel sont exprimées
tribuer des coordonnées à des points
ces éphémérides.
géodésiques matérialisés au sol, ou à
un point particulier d’instrument pour
des stations permanentes (ex. : ARP :
Antenna Reference Point).
Selon les méthodes d’observations
employées, leurs précisions, la réparti-
tion des points et les modèles physiques
introduits dans les traitements on
obtiendra des coordonnées différentes,
Figure 3. les coordonnées géographiques
donc des réalisations différentes et par
géodésiques
conséquence une position différente du Figure 4. Placement de l’ellipsoïde dans
repère cartésien par rapport à la Terre. les réalisations pre- et post-géodésie
Les coordonnées géographiques Avant l’ère spatiale les techniques utili- spatiale [9]
géodésiques : sées étaient l’astronomie de position qui
λ : la longitude est l’angle entre le plan seule permettait une position absolue Remarque : les appellations “Système
méridien origine (XOZ) et le plan méri- sur Terre et des mesures d’angles et géodésique” ou “Datum” sont fréquem-
dien du point. de distances entre des points proches ment utilisées sans différencier le SRT
ϕ : la latitude est l’angle entre la normale à à la surface de la Terre (triangulation, du RRT.
l’ellipsoïde et le plan de l’équateur (XOY). polygonation, cheminements, etc.).
h : la hauteur au-dessus de l’ellipsoïde Ces techniques ont permis de placer n Changement de RRT
est la distance entre M et l’ellipsoïde le centre du repère à des distances Pour amener le repère RRT1 en coïn-
comptée sur la normale. de plusieurs centaines de mètres cidence avec le repère RRT2 il faut
La longitude et la latitude sont des du centre des masses et ils sont dits effectuer une similitude dans l’espace,
angles et diverses unités angulaires quasi-géocentriques. Les systèmes de c’est-à-dire :
sont utilisées (radians, degrés déci- références étaient définis au niveau d’un – une translation de l’origine
maux, degrés sexagésimaux, heures, pays ou d’un continent car les mesures – une homothétie K car l’échelle du SRT
grades, etc.). L’unité pour h est une ne permettaient pas de traverser les dépend de la reproduction du mètre
unité linéaire en général le mètre. océans. Les coordonnées obtenues sont par les techniques de mesures
La relation entre les coordonnées bidimensionnelles en général longitude,
cartésiennes et les coordonnées latitude, et les ellipsoïdes utilisés sont
géographiques est : nombreux, de dimensions qui diffèrent
de la centaine de mètres, définis pour – une rotation dans l’espace compo-
s’adapter au mieux à la zone terrestre sée de trois rotations autour des
d’application. axes eX, eY, eZ petits angles de rota-
Les mesures de géodésie spatiale tion (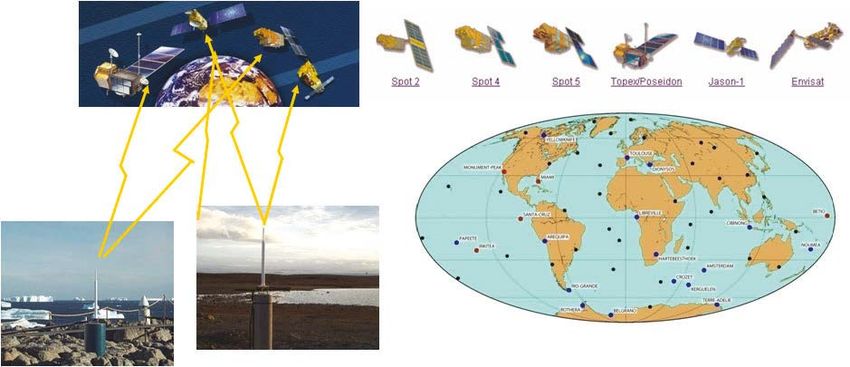
GÉODÉSIE
q Remarque : il arrive que dans le cas de ITRF (International
traitement de systèmes de référence Terrestrial Reference Frame)
(1)
anciens, les paramètres de rotation
et d’échelle étant importants, cette Les ITRF sont les réalisations de l’ITRS.
relation ne soit suffisante et qu’un Les différentes réalisations ITRF sont
développement à l’ordre supérieur basées sur un réseau de stations d’ob-
soit nécessaire (cas pour l’île de la servations de différentes techniques
Réunion). spatiales de géodésie.
Les différentes techniques spatiales
En géodésie on a plutôt l’habitude
permettent de générer des jeux de coor-
d’utiliser les rotations dans l’autre
données dans des systèmes terrestres
sens Ri = - εi, il faut toujours vérifier
proches et on réalise le système de réfé-
dans les logiciels quelle convention
rence terrestre en combinant ces jeux
de signe est utilisée. Dans la suite on
de coordonnées.
utilisera les notations suivantes :
Les techniques spatiales qui sont utili-
Figure 5. Changement de RRT sées pour ces réalisations sont :
RXYZ : matrice de rotation dans l’es- n La VLBI : Very Long Base
pace, produit de trois rotations autour Interferometry
des axes OX, OY, OZ Le principe de mesure est la détermina-
tion de la différence des temps d’arrivée
à deux radiotélescopes éloignés du
front d'onde d'un signal aléatoire
provenant d’une même source extra-
galactique (quasar).
L’équation de changement de coordon-
nées s’écrit alors :
(3)
S : vecteur
coordonnées
Les angles ε sont petits et en dévelop- L’ITRS (International du quasar,
pant au premier ordre Terrestrial Reference exprimé dans
System) le système
terrestre
L’ITRS est système de référence C : vitesse de la lumière
En négligeant les termes du second
international de référence terrestre
ordre la matrice RXYZ devient alors :
recommandé par l’IERS (International
Earth Rotation Service).
Il est défini comme suit :
– son origine est le centre des masses de
laTerre incluant atmosphère et océans,
– s on orientation conventionnelle
est celle définie par celle du repère
du Bureau international de l’heure
En reportant dans (1) et développant au
(BTS84) et une évolution temporelle
premier ordre en négligeant les termes
guidée par une condition de non-
εiD (de l’ordre de 10-11) on obtient :
rotation de la croûte terrestre,
Figure 6. Principe du VLBI et Antenne
– son échelle est définie par le mètre
de WETTZELL
SI.
Il existe plusieurs réalisations de l’ITRS
(2) et nous évoquerons dans la suite n La télémétrie laser sur satellites
surtout celles de l’IERS, recomman- ou sur la Lune
dées par l’UGGI (Union géodésique et Mesure de distance par tir laser sur la
géophysique Internationale) et l’ONU Lune ou sur satellite en mesurant le
(GGIM). temps aller et retour.
48 Revue XYZ • N° 154 – 1er trimestre 2018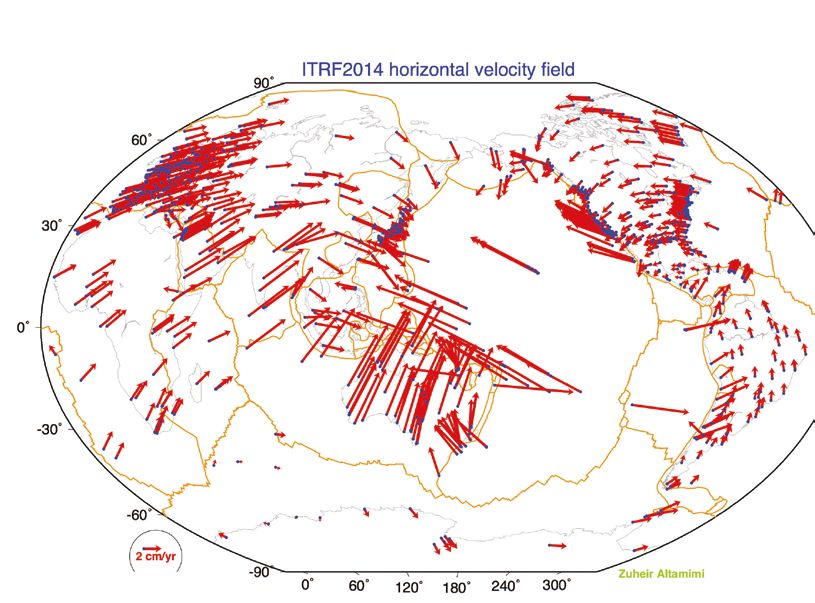
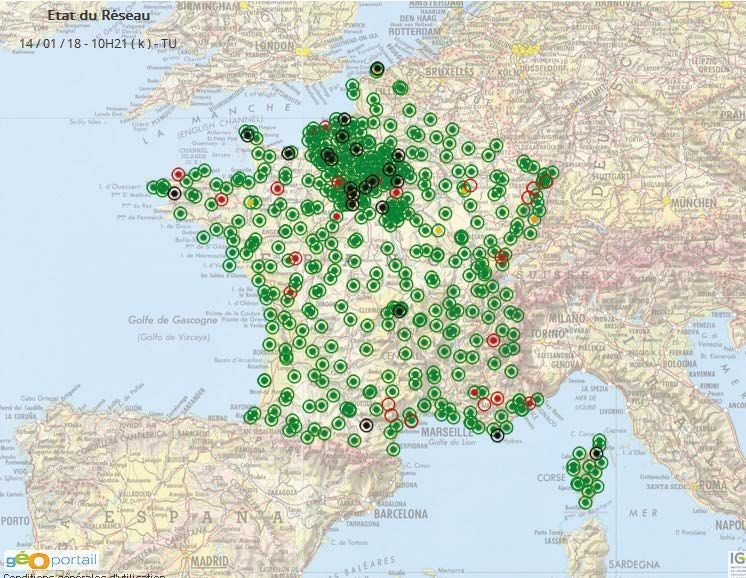
Figure 9. Balises, réseau DORIS
n DORIS : Détermination d’Orbite plus efficace pour déterminer le centre
et Radiopositionnement Intégrés des masses, le VLBI pour l’échelle. Les
sur Satellite) stratégies choisies pour chaque réalisa-
Des balises au sol émettent des signaux, tion sont précisées sur http://itrf.ign.fr/
des mesures Doppler sont faites par des ITRF_solutions/.
récepteurs embarqués dans différents
En 2017, 13 réalisations sont déjà
satellites.
publiées : ITRF88, ITRF89, ITRF90,
Les réalisations ITRF du système ITRF91, ITRF92, ITRF93, ITRF96,
terrestre ITRS sont basées sur un réseau ITRF97, ITRF2000, ITRF2005, ITRF2008,
Figure 7. Satellites Lageos et Stella, de stations, pour lesquelles on dispose ITRF2014. L’année qui figure dans le
réflecteur sur la lune, tir au Laser de jeux de coordonnées issues de trai- nom de la réalisation signifie que toutes
tements d’observations sur plusieurs les observations jusqu’à l’année préci-
n Les GNSS (Global Navigation années avec les techniques vues précé- sée ont été prises en compte dans les
Satellite System) demment. Sur certains sites plusieurs calculs. Les réalisations sont de plus en
Mesure de distance entre un récepteur techniques sont utilisées, on dit qu’il y plus précises, car elles intègrent de plus
au sol et un émetteur dans le satellite a colocalisation, et les différents instru- en plus de stations, le nombre d’obser-
par différence de phase entre l’émission ments de mesures sont rattachés les uns vations augmente et les traitements
et la réception du signal. aux autres par métrologie. La combinai- pour obtenir les jeux de coordonnées
son de ces jeux de coordonnées permet sont de plus en plus performants. Elles
d’obtenir un jeu de coordonnées qui ne diffèrent entre elles que de quelques
constitue la réalisation. centimètres et les plus récentes que de
quelques millimètres.
La combinaison tient compte du fait
que les différentes techniques sont plus Du fait la tectonique des plaques, tout
ou moins efficaces pour déterminer les point de l’écorce terrestre et donc les
paramètres, par exemple le SLR est points du réseau sont en mouvement
q
Figure 8. GNSS :
satellites GPS,
GLONASS, GALILEO,
station permanente
RGP de Grasse
Figure 10. Réseau de l’ITRF2014 ([1]Z.Altamimi)
Revue XYZ • N° 154 – 1er trimestre 2018 49
GÉODÉSIE
sur
: http://itrf.ign.fr/ITRF_solutions/2014/
doc/ITRF2014-soln-gnss.snx .
On voit dans le tableau 2 que les para-
mètres de transformation d’un ITRF
vers tous les autres sont fournis à une
époque donnée ainsi que leurs varia-
tions dans le temps.
Pour changer de réalisation il faut tenir
compte de la dépendance au temps
des paramètres de transformations et
écrire la différentielle de l’équation (3)
par rapport au temps.
Figure 11. Les vitesses des stations dans l’ITRF2014 ([1] ALTAMIMI Z.)
dans l’ITRF. Quand on donne les coor- On peut ainsi calculer les coordon-
q données d’un point dans un ITRF il faut nées d’un site ITRF à n’importe quelle
donc toujours préciser la date, c’est ce époque. On remarque dans le tableau Donc les termes sont négli-
qu’on appelle l’époque, qui s’exprime 1 que la variation des coordonnées est geables
par l’année et le jour comme la partie de quelques centimètres par an. L’équation se réduit alors à :
décimale de l’année : 2017.06 pour le (4)
Dans le tableau 1 les vitesses des
20 janvier 2017. On dira par exemple
stations sont constantes, mais à
qu’un jeu de coordonnées est exprimé Dans les tableaux 1 et 2 les coordon-
partir de ITRF2014 pour les stations
dans l’ITRF2014, époque 2017.06. nées des stations et les paramètres de
de référence ayant des discontinuités
transformation dans l’ITRF2014 sont
Pour chaque réalisation, les coordon- de position liées à des tremblements
données à l’époque to. On calcule donc
nées et les vitesses des sites sont de terre le déplacement linéaire est
leurs valeurs à l’instant t par :
publiées dans un format texte (SSC) complété par des corrections de “post
et pour une exploitation scientifique. seismic deformation” qui sont fournis
et pour chaque paramètre P de la tran-
formation
ITRF2014 station positions AT EPOCH 2010.0 and velocities GNSS stations
DOMES NB. SITE NAME TECH. ID. X/Vx Y/Vy Z/Vz À chaque réalisation ITRF correspond
-----------------------m/m/y--------------------- un modèle de déplacements horizon-
10001S006 Paris GNSS OPMT 4202777.3053 171368.0862 4778660.2517 0 taux des plaques tectoniques et on peut
10001S006 -.01305 0.01758 0.01031 calculer la vitesse d’un point sur une
10002M006 Grasse (OCA) GNSS GRAS 4581690.8306 556114.9301 4389360.8511 plaque :
10002M006 -.01377 0.01887 0.01142
Tableau 1. Extrait de http://itrf.ign.fr/ITRF_solutions/2014/doc/ITRF2014_GNSS.SSC.txt
Transformation parameters from ITRF2014 to past ITRFs.
SOLUTION Tx Ty Tz D Rx Ry Rz EPOCH : vecteur vitesse de rotation de la
UNITS------>mm mm mm ppb .001" .001" .001" plaque, dont la direction est l’axe des
pôles de rotation de la plaque, passant
RATES Tx Ty Tz D Rx Ry Rz par le centre de la Terre et le module la
UNITS----> mm/y mm/y mm/y ppb/ .001"/y .001"/y .001"/y vitesse angulaire.
----------------------------------------------------------------------------------------------------- : biais d’origine (ORB)
ITRF2008 1.6 1.9 2.4 -0.02 0.00 0.00 0.00 2010.0 Pour la réalisation 2014 le modèle est
rates 0.0 0.0 -0.1 0.03 0.00 0.00 0.00 publié dans [2] (https://doi.org/10.1093/
ITRF2005 2.6 1.0 -2.3 0.92 0.00 0.00 0.00 2010.0
gji/ggx136).
rates 0.3 0.0 -0.1 0.03 0.00 0.00 0.00
Évidemment ce modèle ne tient pas
ITRF2000 0.7 1.2 -26.1 2.12 0.00 0.00 0.00 2010.0
rates 0.1 0.1 -1.9 0.11 0.00 0.00 0.00 compte de la vitesse du point sur la
plaque. Il n’y a pas de modèle de dépla-
Tableau 2. Extrait de http://itrf.ign.fr/doc_ITRF/Transfo-ITRF2014_ITRFs.txt cements verticaux.
50 Revue XYZ • N° 154 – 1er trimestre 2018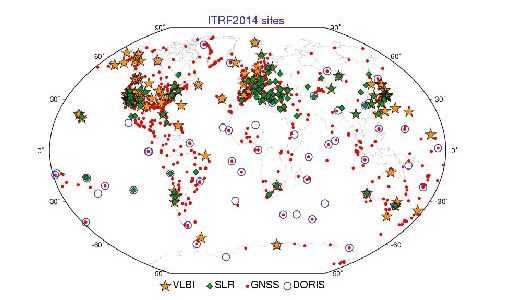
Comment obtenir
des coordonnées dans ITRF
par les techniques GNSS
n Positionnement absolu
en temps réel
Ce positionnement est le mode naturel
du système GPS utilisé pour la naviga-
tion. Le repère dans lequel le point est
positionné est le WGS84, dont les éphé-
mérides sont radiodifusées en temps
réel par les signaux des satellites GPS. Il
existe plusieurs réalisations du WGS84
(G730, G873, G1150…) et les plus
récentes sont à quelques centimètres de
l’ITRF. Il n’existe pas de transformation
entre les WGS84 et les ITRF.
Ce type de positionnement étant peu
précis (σ >1 mètre) on peut considé- Figure 12. Réseau de l’IGS
rer que le point est positionné dans
n Positionnement différentiel telle sorte que l’on obtienne des coor-
n’importe quel ITRF à l’époque des
à l’aide des stations permanentes données qui ne varient quasiment pas
observations.
GNSS de l’IGS dans le temps. Elles suivent la plaque
En outre on peut remarquer que
Il s’agit d’enregistrer des observations tectonique dans son mouvement.
lorsqu’une position est donnée en
précises par mesures de phases dont la
WGS84 on précise rarement la réalisa-
durée dépend de la distance aux stations
tion et l’époque. L’ETRS89
IGS (International GNSS service) les
plus proches. Les coordonnées de ces
n Positionnement ponctuel précis Ce système de référence terrestre
stations sont données dans les fichiers
(PPP) européen a été défini par le groupe
SINEX, sous la forme coordonnées et
Ce positionnement précis est basé sur EUREF (European Reference frame) de
vitesses à l’époque t0.
les mesures de codes et de phases. l’International Association of Geodesy.
Le réseau IGS comprend plus de stations
En post-traitement les éphémérides Par définition l’ETRS89 coïncide avec
que celles retenues pour l’ITRF et les
utilisées et corrections d’horloge sont l’ITRS à l’époque 1989,0 et il suit la
coordonnées et vitesses de ces stations
précises comme par exemple celles plaque tectonique Eurasie dans son
GNSS sont calculées et publiées en
de l’International GNSS Service (IGS) mouvement.
continu sur le site de l’IGS, ce sont les
(éphémérides ultra-rapides, rapides ou Le réseau GNSS permanent EPN est
solutions cumulées de l’IGS alignées sur
finales qui sont les plus précises). Les une densification du réseau IGS sur
l’IGS14. L’IGS14 est extrait de l’ITRF2014
éphémérides précises sont exprimées l’Europe.
restreint aux stations GNSS et corrigé
dans la réalisation ITRF la plus récente. Il existe plusieurs réalisations ETRF,
des centres de phase.
La position obtenue est de précision correspondant aux différentes réali-
Pour un calcul précis les coordonnées
centimétrique et est exprimée alors sations de l’ITRF. L’ETRF2000 est
des stations IGS sont calculées à l’ins-
dans cette réalisation à l’époque des actuellement la plus utilisée.
observations. Certains logiciels de
tant des observations et les éphémérides q
précises de l’IGS sont utilisées.
calculs en PPP, qu’ils soient ou pas en
La position obtenue peut être millimé-
ligne, intègrent un module de calcul
trique selon les modes d’observations
qui permet de changer de réalisation
et de calculs (cf [4]) et est exprimée dans
ITRF et d’époque.
le même ITRF que les coordonnées
Le PPP temps réel, utilise des correc- des stations permanentes à l’époque
tions d’horloges et d’orbites diffusées des observations. Certains logiciels de
en temps réel par différents services calculs proposent de ramener dans
(IGS, EPN, STARFIX, PPP-WIZARD…). l’ITRF et à l’époque souhaitée car ils
Ces corrections sont prédites donc utilisent le modèle de mouvement des
moins précises, et données dans un plaques, compatible avec l’ITRF.
système de référence terrestre qui
n’est pas toujours clairement précisé, Les réalisations régionales
cependant en général il s’agit de la
réalisation ITRF la plus récente. (voir Ces réalisations régionales sont Figure 13. Réseau GNSS permanent EPN
BOSSER P.[5]) basées sur l’ITRF, mais définies de (Euref Permanent Network)
Revue XYZ • N° 154 – 1er trimestre 2018 51
GÉODÉSIE
Ce rattachement à la référence natio-
CLASS_A EPN STATION POSITIONS AND VELOCITIES
REFERENCE FRAME: ETRF2000 AT EPOCH OF 2010.0 nale peut être millimétrique, à condi-
CUMULATIVE SOLUTION OF GPSWEEKS [ 0834 - 1950 ] tion que les méthodes d’observations
RELEASE NAME: EPN_A_ETRF2000_C1950 et de calculs GNSS soient appro-
RELEASED ON 19/12/2017 BY EPN REFERENCE FRAME COORDINATOR priées (voir [4]).
(Juliette LEGRAND, ROB, BELGIUM) – En utilisant certains réseaux GNSS
permanents temps réel comme par
DOMES NB. SITE NAME TECH. ID. X/Vx Y/Vy Z/Vz. exemple le réseau TERIA, l’utilisateur
CLASS -----------------m/m/Y-- obtient des coordonnées directement
-------------------------------------------------------------------------- dans le RGF93 avec une précision
10002M006 GRAS GPS GRAS 4581691.159 556114.578 4389360.563
centimétrique.
10002M006 -.0005 -.0002 -.0005
– En stationnant les points du RBF, l’uti-
lisateur peut accéder au RGF93 avec
Tableau 3. Coordonnées et vitesses de stations du réseau permanent EPN (Euref Perma-
une précision centimétrique.
nent Network) dans la réalisation ETRF2000 de l’ETRS89 ftp://epncb.oma.be/epncb/
– Par positionnement PPP en temps
station/coord/EPN/EPN_A_ETRF2000.SSC (extrait)
réel ou différé avec une précision qui
http://www.epncb.oma.be/_networkdata/stationlist.php
dépend de la précision du calcul PPP
mais aussi de la transformation utili-
Dans le tableau 3 on voit que les ([12]Harmel.A.(2010)). Les points du
q vitesses des stations dans ETRF2000 RBF ont été réobservés plusieurs fois
sée entre l’ITRF et le RGF93.
sont inférieures à 1 mm/an et que les depuis. La vitesse des points dans le
coordonnées ETRF2000(R14) diffèrent RGF93 est nulle. Les réalisations outremer
à l’époque 2010 de celles de l’ITRF2014 Il y a plusieurs possibilités pour l’utili- Des réalisations équivalentes au RGF ont
à la même époque de plusieurs dizaines sateur d’accéder au RGF93 : été faites par campagnes de mesures
de centimètres. – en utilisant le réseau GNSS perma- GNSS sur un réseau de points géodé-
Un outil en ligne de transformation nent : siques matérialisés et rattachés aux
entre ITRF et ETRF est disponible sur le le réseau RGP contient actuellement stations de l’IGS les plus proches.
site WEB de l’EPN: http://www.epncb. plus de 400 stations permanentes. Chacune de ces réalisations a été fixée
oma.be/_productsservices/coord_trans/. Les coordonnées des stations en à une réalisation ITRF à une époque
En limite de la plaque Eurasie, dans des RGF93 figurent dans les fichiers donnée proche des observations. Il
zones actives géophysiquement, ou d’observation RINEX, ce qui permet n’y a pas actuellement de réalisations
dans le nord de l’Europe avec le rebond d’avoir directement dans le calcul par observations de réseau permanent
post-glaciaire, les vitesses de points ne de lignes de bases les coordonnées car les stations permanentes sur ces
sont plus négligeables. RGF93 du point. territoires ne sont pas encore assez
Le RGF93
Le RGF93 est la réalisation de l’ETRS89
sur la France continentale et la Corse.
La première réalisation du RGF93 a été
faite par campagne d’observations GPS
sur plus de mille points géodésiques
matérialisés (RBF : réseau de base fran-
çais). Les 23 points du RRF (réseau de
référence français) ont servi à la réalisa-
tion de l’ETRS89.
En 1998 les premières stations du
réseau permanent RGP ont commencé
à être installées. Elles ont alors été
rattachées aux points du RBF pour
leur attribuer des coordonnées RGF93
nouvelles. En 2009, un recalcul de
toutes les observations du RGP a été
mené, dans le cadre du recalcul de
l’ETRF. Les coordonnées ETRF2000,
époque 2009,0, ont été attribuées aux
stations RGP et les coordonnées du
RBF ont été recalculées dans le RGF93 Figure 14. Réseau GNSS permanent RGP (http://rgp.ign.fr/)
52 Revue XYZ • N° 154 – 1er trimestre 2018
nombreuses. On peut le regretter car n° SRT Epoque X(m) Y(m) Z(m)
contrairement à la France Métropolitaine, 1 ITRF2014 2010.0 4581690,831 556114,930 4389360,851
ces territoires ont une tectonique régio- 2 ETRF2014 2010.0 4581691,115 556114,608 4389360,563
nale souvent mal connue. 3 ETRF2000 2010.0 4581691,159 556114,578 4389360,562
Exemple : pour les Antilles la réalisa- 4 ETRF2000 2009.0 4581691,159 556114,578 4389360,563
tion RGAF09 est issue d’une campagne 5 ETRF2000 2009.0 4581691,159 556114,578 4389360,563
d’observation GPS sur un réseau de 6 RGF93 4581691,159 556114,576 4389360,566
points géodésiques matérialisés, ratta- Le jeu n°1 est celui de la réalisation ITRF2014 donné dans tableau 1
chés à l’IGS avec des stations proches. Le jeu n°2 est obtenu par transformation du jeu n°1 avec coord_trans l’outil de
Les coordonnées ont été fixées à celles transformation de coordonnées de l’EPN http://www.epncb.oma.be/_productsser-
de l’IGS05 (l’ITRF2005), époque 2009,0. vices/coord_trans/).
Le jeu n°3 est obtenu par transformation (coord_trans) du jeu n°1
Le détail de chaque réalisation en Le jeu n°4 est obtenu par transformation du jeu n°3 et la vitesse du point donné
outremer est disponible sur http:// dans le tableau 3 (coord_trans)
geodesie.ign.fr/index.php?p=61& Le jeu n°5 est obtenu par transformation du jeu n°1 et la vitesse du point donné
page= documentation dans le tableau 1 (ccord_trans)
Ces réalisations sont accessibles grâce Le jeu n°6 est le jeu de coordonnées de la réalisation officielle du RGF93
L’écart entre les jeux n°1 et n°2 est de 54 cm, et correspond au mouvement de
à quelques stations permanentes et la plaque tectonique Eurasie entre 1989,0 et 2010,0. L’écart entre les jeux n°3 et n°4
aussi par les réseaux de points géodé- est de 1 mm et correspond au mouvement du point dans l’ETRF.
siques matérialisés. Les jeux n°4 et n°5 bien que calculés différemment sont identiques.
L’écart entre les jeux n°4 et n°6 est de 3,6 mm et correspond à la différence entre
Un calcul GNSS en ligne sur le site de la réalisation ETRF2014 et la réalisation RGF93
l’IGN(http://rgp.ign.fr/SERVICES/calcul_
Tableau 4. Coordonnées d’un point dans plusieurs réalisations et diverses époques
online.php) permet de faire les calculs
précis dans tous ces territoires [15]. n° SRT Epoque X(m) Y(m) Z(m)
Pour une détermination PPP, comme 1 ITRF2014 2018.02 4581690,713 556115,087 4389360,964
les coordonnées obtenues sont en ITRF 2 ETRF2000 2009.0 4581691,154 556114,583 4389360,589
à l’époque des observations pour obte- 3 ETRF2000 2009.0 4581691,149 556114,583 4389360,583
nir des coordonnées dans le système Le jeu n°1 est obtenu par un calcul PPP des observations sur un jour de la station
national légal il faut pratiquer un chan- Grasse avec le calcul en ligne CSRS_PPP de NRCAN (http://www.nrcan.gc.ca/earth-
sciences/geomatics/geodetic-reference-systems/tools-applications/10925#ppp ). La
gement de TRF en tenant compte du précision donnée par le calcul est à 95 % : nord : 0,003 m, est : 0.006 m, hauteur :
mouvement de la plaque tectonique. 0,013 m)
Une version en ligne du logiciel CIRCE Le jeu n°2 est obtenu par transformation de ITRF2014 époque 2018,02 et ETRF2000
V5 de L’IGN permettra bientôt de faire époque 2009,0 avec coord_trans. La vitesse utilisée est celle de tableau 1. On
des changements de réalisations et constate un écart de 2,5 cm avec les coordonnées RGF93 officielles.
d’époques pour obtenir des coordon- Le jeu n°3 est obtenu par calcul avec le modèle de plaque tectoniques ITRF2014
(A.Harmel ahgeodev.fr ). L’écart avec le coordonnées RGF93 officielles est 2,1 cm.
nées dans les références nationales
Françaises (voir [13]). Tableau 5. Exemple avec une détermination PPP(NRCAN)
Dans l’optique de déterminations très n° SRT Epoque X(m) Y(m) Z(m)
précises (PPP statique), si le point
IGS08
stationné a un mouvement connu sur 1 2018.02 4581690,719 556115,086 4389360,962
(ITRF2008)
la plaque il faut prendre en compte sa
2 ITRF2014 2018.02 4581690,716 556115,084 4389360,959
vitesse.
3 ETRF2000 2009.0 4581691,158 556114,583 4389360,582
4 RGF93 4581691,149 556114,581 4389360,577
Quelques exemples 5 ETRS89 2018.02 458 1691,151 556114,578 4389360,574
numériques Le jeu n°1 est obtenu par un calcul ligne de base des observations sur un jour
de la station Grasse avec le calcul en ligne de l’IGN (http://rgp.ign.fr/SERVICES/
Pour illustrer ce qui vient d’être exposé calcul_online.php ). La précision donnée par le calcul est à 95 % : nord : 0,008 m,
est : 0.009 m, hauteur : 0,016 m).
on s’intéresse à la station GNSS de
Le jeu n°2 est obtenu à partir du jeu n°1 et changement de réalisation avec coord-trans
Grasse (GRAS) qui appartient aux Le jeu n°3 est obtenue par transformations de ITRF2014 époque 2018,02
réseaux RGP, EPN, IGS et ITRF. et ETRF2000 époque 2009,0 avec coord_trans. La vitesse utilisée est celle de
Le but du tableau 4 est d’illustrer les tableau 1. On constate un écart de 1,7 cm avec les coordonnées RGF93 officielles.
changements de réalisations avec ou Le jeu n°4 : coordonnées RGF93 en sortie du calcul en ligne IGN. L’écart avec les
coordonnées RGF93 officielles est 1,6 cm.
sans changement d’époque.
Le jeu n°5 : coordonnées ETRS89 (sans précision de la réalisation ETRF) donnée
par le calcul en ligne IGN et à l’époque des observations. L’écart entre les jeux
La vitesse de la station de GRAS dans n°4 et 5 est 4 mm. Si on compare le jeu n°1 du tableau 5 et n°2 du tableau n°6,
l’ITRF et dans l’ETRF est connue, car il on voit que les deux calculs du même jeu de donnée d’observations par les deux
s’agit d’une station permanente, pour méthodes différentes sont compatibles à 6 mm près.
un point nouveau ces vitesses sont Tableau 6. Calcul GNSS ligne de base (IGN)
q
Revue XYZ • N° 154 – 1er trimestre 2018 53
GÉODÉSIE
inconnues. Dans le tableau 4 on est comparer à des outils de référence. de
référence terrestre régionaux” cours
q parti des coordonnées publiées dans Actuellement la précision de ces chan- ingénieur ENSG, décembre 2016.
la réalisation de l’ITRF2014. Dans les gements de coordonnées est proche [9] DUQUENNE F., BOTTON S., PEYRET F.,
tableaux 5 et 6 les coordonnées de du centimètre. BBETAILLE D., WILLIS P. “GPS : localisation
et navigation par satellites” Hermes-
GRAS sont considérées inconnues et
Quand les médias annoncent que Lavoisier 2005.
on utilise 24 heures observations du
maintenant on va pouvoir position- [10] DUQUENNE F. et H. “cours de
09/01/2018 pour les déterminer soit en géodésie” CNAM/ESGT(2003) http://www.
ner une voiture au centimètre, on a
PPP (tableau 5) soit par calcul lignes de aftopo.org/FR/ouvrages-34.html
envie de leur demander quel est le
base (différentiel) (tableau 6). [11] FIG commission 5 “Reference frames
détail de la voiture qui est positionnée
in practice Manual” FIG publication n°64,
aussi précisément et surtout dans quel
mai 2014, téléchargeable sur www.FIG.net
Conclusion système de référence est cette posi- [12] HARMEL A.(2010) “Rénovation du
tion. Mais ceci est une autre histoire ! l RGF93” revue XYZ n°124, pages 36 à 40,
Les techniques de positionnement
GNSS sont de plus en plus précises et
http://www.aftopo.org/FR/xyz-4.html
il devient incontournable pour l’utilisa- Contact [13] HARMEL A “Transformations
entre ITRF-application aux références
teur de comprendre, dans quel système Françoise DUQUENNE nationales” IGN/SGN, NT/G 162, 9
de référence terrestre on obtient les Présidente de l’AFT décembre 2013.
coordonnées après traitement. contact.fduquenne@gmail.com [14] LUZET C.“Evolution du canevas
Les concepts de système de référence géodésique national ” revue XYZ n°69,
terrestre et leurs réalisations sont page 55, décembre 1996
difficiles à comprendre, mais il faut Références http://www.aftopo.org/FR/xyz-4.html
rassurer ici les utilisateurs qui mani- [1] ALTAMIMI Z. , REBISCHUNG P ., METIVIER [15] MATHIS E.R. “Introduction aux calculs
pulent des données dont le géoréfé- L., COLLILIEUX X. (2016) “ITRF2014 : a new en ligne GNSS” revue XYZ °152 , p 22 à 24,
rencement a une précision moindre release of the International Terrestrial septembre 2017
que le mètre, ils ne sont pas concer- Reference Frame modeling non linear http://www.aftopo.org/FR/xyz-4.html
nés et pour eux WG84, ITRF, ETRF,
station motions” Journal of geophysical
Research: Solid Earth,volume 121, issue 8,
RGF93, n’importe quelle réalisation ou p 6109-6131 ABSTRACT
époque c’est du pareil au même. Le http://onlinelibrary.wiley.com/ What are Terrestrial Reference System
conseil à leur donner cependant, c’est doi/10.1002/2016JB013098/full and Frame? How were they built
de fournir comme métadonnées à leur [2] ALTAMIM Z., METIVIER L., REBISCHUNG
yesterday and mostly today? How
produit, les références légales, ainsi P., ROUBY H., COLLILIEUX X. “ITRF2014
plate motion model” Geophysical Journal to convert from one to another?
que la classe de précision pour faciliter
International, volume 209, Issue 3, 1er juin That is the purpose of this paper.
la fusion avec des données localisées
2017, pages 1906-1912. International, European and French TRF
plus précises.
https://doi.org/10.1093/gji/ggx136 definitions are explained. Numerical
On a vu dans les exemples précé- [3] ALTAMIMI Z., REBISCHUNG P., examples give us some ideas of
dents que l’utilisateur averti pouvait METIVIER L., COLLILIEUX X. “L’ITRF2014 accuracy in conversions. While GNSS
accéder au niveau centimétrique aux et la modelisation des mouvements non positioning is more and more precise,
linéaires des stations” Revue XYZ n°153
différentes réalisations et époques. users must know all these concepts to
page 55-57, Décembre 2017.
Cependant c’est l’utilisation des http://www.aftopo.org/FR/xyz-4.html reach a full accuracy.
réseaux permanents qui lui facilite la [4] BIROT F.,DURAND S , FUND F., LEGROS
mise en référence nationale et cela est R., MOREL L., VIGUIER F. “Méthodes GNSS
même devenu transparent avec l’utili- pour la Topographie” numéro spécial XYZ
sation des réseaux GNSS temps réel. n°138b, p 42, mars 2014
http://www.aftopo.org/FR/xyz-4.html ERRATUM
De plus en plus d’applications [5] BOSSER P. “Evaluation d’une solution
utilisent le PPP dont les performances de positionnement ponctuel précis temps Dans le XYZ153 de décembre 2017,
rejoignent maintenant en précision le réel” Revue XYZ n°148, p 33, septembre le lecteur a pu se familiariser avec
positionnement par réseau permanent, 2016. “L’ITRF2014 et la modélisation des
mais la position obtenue est exprimée http://www.aftopo.org/FR/xyz-4.html mouvements non linéaires des
dans une des réalisations ITRF géné- [6] BOUCHER C. and al (2017) stations“.
ralement à l’époque des observations “Les références de temps et d’espace”
BOUCHER C. ed HERMANN Cependant la première colonne de
qu’il est nécessaire de bien identifier,
http://www.aftopo.org/FR/ouvrages-34. la page 57 comporte l’équation (1) :
pour ensuite faire les bonnes trans- html
formations. L’utilisateur peut utiliser [7] COLLILIEUX X. (2017) “Introduction aux
des outils mis à sa disposition et s’il Systèmes de Référence Terrestres” Cours qu’il convient de remplacer par :
veut développer ses propres outils, au mastère Positionnement et mesures de
outre qu’il est nécessaire qu’il maîtrise déformation (PPMD), février 2017
tous les concepts, il est prudent de les [8] COLLILIEUX X. “Systèmes et repères
54 Revue XYZ • N° 154 – 1er trimestre 2018
Vous pouvez aussi lire