LOCALISATION ET NAVIGATION DE ROBOTS - UFR DES SCIENCES, DÉPARTEMENT EEA M2 EEAII, PARCOURS VIROB
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Localisation et navigation
de robots
UFR des Sciences, Département EEA
M2 EEAII, parcours ViRob
Semestre 9, 2014/2015
Fabio MORBIDI
Laboratoire MIS
Équipe Perception et Robotique
E-mail: fabio.morbidi@u-picardie.fr
Jeudi, salle TP102, 14.00-17.00h
2
Évolution du cours au fil du temps
Localisation et navigation
des robots (ViRob)
Localisation, navigation
et asservissement
2011-2012 • Vision avancée (ViRob)
2012-2013
• Asservissement visuel (Opt.)
2014-2015
3
Perspective d’ensemble
Perception Décision
Environnement
Action
“See-Think-Act”
4
Exemple …
Perception: Il y a un mur en face!
Décision: Tourne à gauche
Action: Régle la vitesse des roues, ex.
ωG (t) = 0.5 rad/s, ωD (t) = 0.1 rad/s, t ∈ [ta , tb ]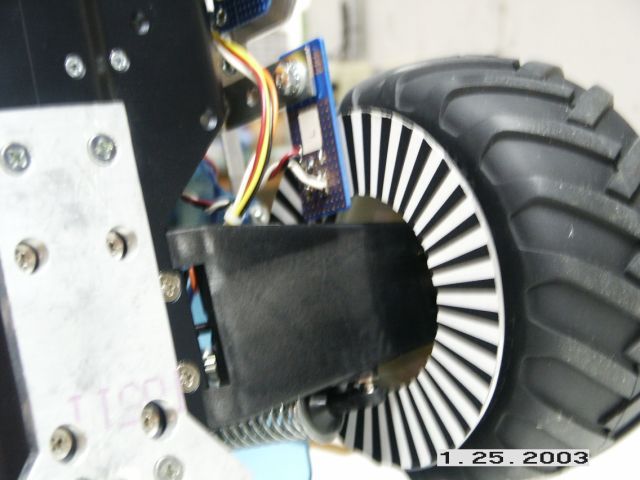
5
Deux questions cruciales …
Où suis-je?
?
Localisation!
Comment aller de A à B?
B
?
Navigation!
A
et aussi …
• Comment détecter B?
• Comment éviter les obstacles?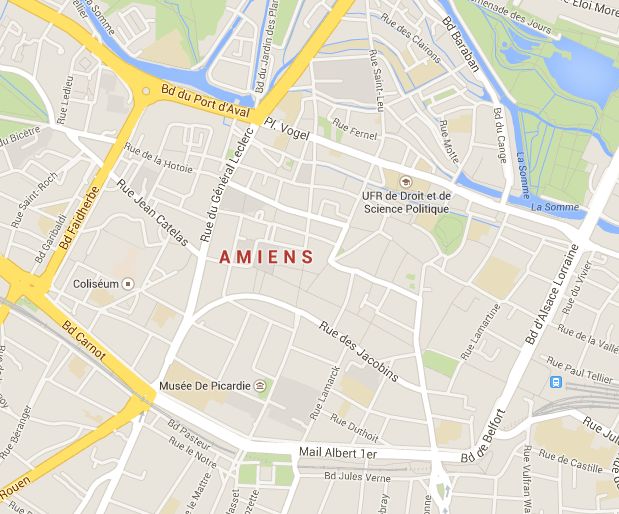
6
Plan du cours
Chapitre 1: Localisation
1.1 Introduction et défis
1.2 Odométrie
1.3 Filtrage et fusion de capteurs
1.4 Autres techniques de localisation
Chapitre 2: Navigation
2.1 Stratégies de navigation
2.2 Architectures de contrôle
2.3 Navigation vers un but
2.4 Evitement d’obstacles
7
Bibliographie
• Introduction to Autonomous Mobile Robots
R. Siegwart, I.R. Nourbakhsh, D. Scaramuzza, MIT press,
2ème éd., 2011 (Chapitres 4, 5 et 6)
• Principles of Robot Motion: Theory, Algorithms,
and Implementations
H. Choset, K.M. Lynch, S. Hutchinson, G.A. Kantor,
W. Burgard, L.E. Kavraki, S. Thrun, MIT press, 2005
• Robotics: Modelling, Planning and Control
B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo, Springer, 1er éd.,
2009 (Chapitres 4, 12)
• Estimation with Applications to Tracking and Navigation:
Theory Algorithms and Software
Y. Bar-Shalom, X.R. Li, T. Kirubarajan, John Wiley & Sons, 2001
(Chapitres 5, 6 et 12)
Diapos du cours: http://home.mis.u-picardie.fr/~fabio/Teaching.html
8
Avant de commencer …
Je suppose que vous avez une bonne connaissance:
• Algèbre linéaire (vecteurs, matrices, valeurs et vecteurs propres, etc.)
• Calcul multidimensionnel (gradients, matrice jacobienne, etc.)
• Théorie des probabilités, variables et processus aléatoires
• Théorie de l’estimation (ex. filtre de Kalman)
• Notions de base de robotique
… à réviser dans les prochaines jours !!!
Note finale: 50% CC , 50% TP
Localisation et navigation
de robots
UFR des Sciences, Département EEA
M2 EEAII, parcours ViRob
Chapitre 1 : Localisation
F. Morbidi 2014/2015
10 Plan du chapitre • Introduction et défis Partie 1 • Odométrie Partie 2 • Filtrage et fusion de capteurs Partie 3 • Autres techniques de localisation Partie 4
11 Partie 1 : Introduction et défis
12
Introduction
• Localiser: “Déterminer la place de quelque chose,
l'endroit où se situe quelque chose” (Dict. La Rousse)
Vous êtes ici13
Introduction
Hypothèse: nous avons une carte de l’environnement
Facile
Difficile14
Introduction
• Robotique manipulatrice
▫ Robots sériels :
où est l’effecteur ?
Robot « fixe »
L’intégration et/ou la combinaison des angles articulaires
permet(tent) de déduire la pose 3D de l’effecteur
Connaissance des longueurs des axes
Plus un problème de calibrage que de localisation15
Introduction
• Robotique manipulatrice
▫ Robots parallèles :
où est l’effecteur?
Plus complexe que sériel
Grande dynamique
Plusieurs bases pour un même effecteur
Mais zone/volume de mouvement limité
et facilement identifiable16
Introduction
• Robotique mobile
▫ Environnement ouvert
▫ Pas de lien fixe avec
l’environnement
▫ Pas de mesures directes
de la pose (x, y, θ)
▫ Zone de mouvement
« sans limite »
Video ETHZ17
Introduction
• Objectif : la navigation
▫ A grande échelle : besoin de localisation
▫ Compétence importante et difficile d’un robot mobile
▫ Pour le succès de la navigation:
Perception: le robot doit interpréter ses capteurs pour
extraire des données pertinentes
Localisation: le robot doit déterminer sa position dans
l’environnement
Décision: le robot doit décider de comment agir pour
atteindre son but
Commande du mouvement: le robot doit actionner
ses moteurs pour réaliser la trajectoire désirée18 Introduction • Localisation: il a reçu la plus grande attention de la recherche au cours de la dernière décennie
19
Où intervient la localisation ?
Connaissance, Mission,
base de données commandes
Localisation « position » Cognition,
Construction de carte carte globale planif. de trajectoire
modèle d’environnement,
trajectoire
carte locale
contrôle de mouvement
Extraction
Réalisation
d’information et
de chemin
perception
interprétation
données brutes commande d’actionneurs
environnement,
Perception monde réel Action20
Introduction
• Schéma général de localisation d’un robot mobile
position mise à jour de
position
(estimation ?)
prédiction de
Encoder position observations
(ex. odométrie) appariées
OK
position prédite
base de appariement
données, carte
données brutes des capteurs
ou primitives extraites
perception
observation21
Les défis de la localisation
• Principalement
▫ Le bruit
Perception (capteurs)
Action (actionneurs)
▫ L’aliasing
Perception: l’aliasing perceptuel définit le
fait que deux lieux distincts peuvent avoir
la même apparence22
Les défis de la localisation
GPS!
• Intuitivement
▫ « GPS » précis : solution ultime pour la localisation
Informe le robot de sa position exacte
Intérieur et extérieur
Réponse immédiate à la question « où suis-je ? »
▫ Mais… un tel capteur n’existe pas !
GPS précis à quelques mètres
Inadapté pour des environnements à taille humaine
et encore moins pour les micro- et nano-robots
GPS ne peut pas fonctionner à l’intérieur ou dans
environnement encombré (canyons urbains et gratte-ciel)
GPS = Global Positioning System (constellation de 24 satellites orbitant à 20000 km)23
Les défis de la localisation
• Au delà des limitations du GPS
▫ Localisation est plus que la connaissance
de position absolue
Exemple : robot interactif
Éventuellement besoin d’une position absolue
Position relative aux humains aussi importante
Sa tâche de localisation doit inclure:
Perception (multi-capteurs) pour identifier les humains
Calcul de sa position relative aux humains24
Les défis de la localisation
Atteindre un lieu particulier demande plus
qu’une « simple » localisation
Étape de décision
Sélection de stratégie pour atteindre des buts
Besoin d’acquérir ou de créer un modèle de son
environnement : une carte (ex. SLAM)
Aide le robot dans sa planification de trajectoire
• En résumé, la localisation c’est plutôt
▫ Construire une carte de l’environnement
▫ Identifier la position du robot relativement à la carte25
Les défis de la localisation
• Éléments cruciaux de cette localisation
▫ Les capteurs du robot
▫ Ses actionneurs
• Les capteurs et actionneurs sont inexactes
et incomplets
Une mesure parfaite n’existe pas
Tout l’environnement ne peut être mesuré d’un coup26 Le bruit des capteurs • Perception ▫ Capteurs : fondamentaux ▫ Leur degré de discrimination de l’environnement est donc critique • Le bruit des capteurs ▫ Inconsistance de mesures dans un même environnement ▫ Source: Primitives de l’environnement non perçues Négligence de ces primitives
27
Le bruit des capteurs
• Exemple 1
▫ Système de vision pour localisation à l’intérieur
Utilisation des couleurs détectées par caméra CCD
Soleil caché : illumination différente (fenêtres)
Valeurs de teinte non constantes
Couleurs CCD « bruitée » pour le robot
Teinte inutilisable sauf si …
Connaissance de la position du soleil
Connaissance des nuages
Autres : flou (mise au point, bougé), gain du signal, etc.28
Le bruit des capteurs
• Exemple 2 émetteur
▫ Sonar : télémètre à ultrasons récepteur
Rapport signal sur bruit très pauvre
Ultrasons émis vers une surface lisse, mal orientée
Signal non reflété vers le capteur
Pas d’écho de retour
Une petite quantité d’énergie peut revenir malgré tout
▫ Si le seuil sur l’amplitude d’énergie reçue en est proche
▫ parfois le sonar permettra de détecter l’objet
▫ parfois non…
▫ Par conséquent :
▫ Pour le robot, un environnement inchangé peut donner deux
lectures différentes pour un sonar : un long, un court!29
Le bruit des capteurs
▫ Plusieurs sonars
Interférences
de l’environnement
entre émetteurs d’ultrasons
Sur les robots mobiles, en général
Entre 12 et 48 sonars sur une même plateforme
Dans certains environnements
▫ Interférences « multi-chemins » en émissions sonars
▫ Un signal émis par un sonar est reçu par un autre…
Peut engendrer d’importantes erreurs de mesures (sous-
estimation): ils se produisent rarement, moins de 1% du temps
En résumé …
• Le bruit de perception réduit l’information utile des mesures d’un capteur
• La solution est de prendre en compte plusieurs mesures,
en les fusionnant au cours du temps ou avec d’autres capteurs afin
d’améliorer globalement l’information perceptuelle du robot30
L’aliasing perceptuel
• Second inconvénient des capteurs
▫ Le contenu informationnel des mesures peut être très faible
▫ Exacerbe les problèmes de perception et de localisation
▫ Problème peu intuitif pour les humains
On ne rencontre que rarement ce phénomène
La perception humaine, particulièrement la vision, tend à
percevoir des informations uniques dans chaque état local unique
Chaque lieu différent semble différent
Mais pas facile:
Se déplacer dans un bâtiment inconnu
qui est complètement sombre
Se déplacer dans un labyrinthe
à taille humaine (pas unicité visuelle)31
L’aliasing perceptuel
• En robotique
▫ L’aliasing est la norme et non l’exception !
▫ Exemple : sonars ou proximètres IR
Champ de perception étroit
Information de profondeur dans une seule direction
Pas d’info comme couleur, texture, rigidité de surface …
Même avec plusieurs de ces capteurs, plusieurs états
dans l’environnement donnent les mêmes mesures
Formellement :
Env. 1
Il y a une association N à 1
des états de l’environnement Env. 2
vers la perception du robot
Env. N32
L’aliasing perceptuel
Exemple de situation concrète
Distinguer les humains des objets
Le robot détecte un obstacle face à lui
▫ Doit-il dire « excusez-moi » car l’obstacle peut être un
humain en mouvement ?
▫ Ou le robot doit-il planifier un chemin autour de l’objet
car ce peut être un carton ?
Pour le(s) sonar(s) seul(s), ces
deux états souffrent d’aliasing
et leur discrimination est impossible!
humain
ou objet?33 L’aliasing perceptuel • L’aliasing perceptuel pose le problème suivant ▫ Supposons des capteurs non bruités La quantité d’information est trop faible pour identifier la position du robot à partir d’un seul percept ▫ « Solution » Localisation basée capteurs et mesures multiples
34 Le bruit d’actionnement • Les difficultés de la localisation ne reposent pas uniquement sur les capteurs • Les actionneurs sont aussi bruités ▫ À cause de la perception ou non ▫ Une même action ordonnée par le robot peut engendrer différentes réalisations … ▫ … même si du point de vue du robot, l’état initial avec l’action est parfaitement connu
35 Le bruit d’actionnement • Les actionneurs de robot mobile induisent une incertitude sur l’état futur • Pour un robot, se déplacer accroît son incertitude • La couche décisionnelle peut minimiser cet effet ▫ Planification et/ou interprétation adaptée ▫ Retour des capteurs dans la boucle de commande
36
Le bruit d’actionnement
• Nature du bruit en robotique mobile
▫ Du point de vue du robot
Impossibilité d’estimer sa propre position à partir de
la connaissance de sa cinématique et de sa dynamique
▫ Vrai source d’erreur
Modèle incomplet de l’environnement
Type de surface non modélisé (rigidité, glissement …)
Événements non envisagés (un humain pousse le robot)37
Le bruit d’actionnement
• Exemple : l’odométrie
▫ Capteurs sur les roues seuls
▫ Éventuellement couplée à un gyroscope/compas
(«dead reckoning»)
▫ Position basée capteurs proprioceptifs
▫ Mouvement intégré pour déduire la position
Intégration des erreurs de mesure
Accumulation d’erreur en position au cours du temps
▫ Besoin d’une autre localisation de temps en temps
Autre mécanisme de localisation
Sinon, la position estimée n’a vite plus de sens
L’odométrie est une technique permettant d'estimer la position d'un véhicule en mouvement. Le terme vient du grec
hodos ("voyage") et metron ("mesure")38 Le bruit d’actionnement • Odométrie pure d’un robot différentiel • Sources d’erreurs (environnement résolution): ▫ Résolution limitée pendant l’intégration (incréments de temps, résolution de mesure, etc.) ▫ Mauvais alignement des roues (déterministe) ▫ Incertitude sur le diamètre de la roue et/ou diamètre non constant (déterministe) ▫ Variation du point de contact de la roue ▫ Contact variable avec le sol (glisse, bosse, sol mou, déformation)
39
L'expérience du chemin carré unidirectionnelle
[Borenstein 1996]40
Le bruit d’actionnement
▫ Types de sources d’erreurs
Déterministes (systématiques)
Résolues par calibrage du système
Non-déterministes (aléatoires)
Erreurs résiduelles
Mènent à des incertitudes de position au fur et à mesure41
Le bruit d’actionnement
• Types géométriques d’erreurs (robot différentiel)
▫ Erreur en distance
Longueur du chemin intégré
Somme des mouvements de roue
▫ Erreur en virage
Similaire à l’erreur en distance
Différence des mouvement de roue
▫ Erreur de dérive (drift)
Une différence d’erreurs entre les roues mène à une
erreur d’orientation angulaire du robot42
Le bruit d’actionnement
• Sur de longues périodes
▫ Erreurs de virage et dérive plus importantes des
erreurs en distance
Contribution non-linéaire à l’erreur de position
▫ Soit un robot de position initiale connue (x0, y0, θ0)
Il se déplace en ligne droite selon l’axe x
Erreur en y pour un mouvement de d mètres : dsin(Δθ)
Devient très importante à mesure que l’erreur
angulaire Δθ croît
Au cours du temps, l’erreur d’orientation par rapport
au repère d’origine croît rapidement et donc, la position
estimée aussi
Il faut alors alors établir un modèle d’erreur pour l’exactitude
odométrique et propager ces erreurs au cours du temps43 Plan du chapitre • Introduction et défis Partie 1 • Odométrie Partie 2 • Filtrage et fusion de capteurs Partie 3 • Autres techniques de localisation Partie 4
44 Partie 2 : Odométrie
45
Notation
a, λ, M scalaires
u ∈ Rn vecteur colonne de dimension n
A ∈ Rn×n matrice avec n lignes et n colonnes
In ∈ Rn×n matrice identité n × n
0n×m ∈ Rn×m matrice de zéros n × m
a1 0 ··· 0
0 a2 ··· 0
diag(a1 , a2 , . . . , an ) =
.. matrice diagonale n × n
0 0 . 0
0 0 ··· an46
Modèle d’erreur pour l’exactitude odométrique
• Généralement la pose (position + orientation) d’un robot
mobile est répresentée par le vecteur:
p = [x, y, θ]T
• Pour un robot de type unicycle, la position est estimée en
partant d’une position connue en intégrant le mouvement
(somme des incréments des distances parcourues)
v
Trajectoire
y θ du robot
ω
Rm x47
Modèle d’erreur pour l’exactitude odométrique
• Dans un système discret avec une période d’échantillonnage
fixée les incréments de distances parcourues sont:
∆x = ∆s cos(θ + ∆θ/2)
∆y = ∆s sin(θ + ∆θ/2)
∆sd − ∆sg t+1
∆θ =
L
L
∆sd + ∆sg
∆s = t
2
(∆x, ∆ y, ∆ θ) Chemin parcouru pendant le dernier intervalle de temps
∆sd , ∆sg Distances parcourues pour la roue droite et gauche, respectivement
L Distances entre les roues du robot48
Modèle d’erreur pour l’exactitude odométrique
• La mise à jour de la pose en p� se fait par:
�
x ∆s cos(θ + ∆θ/2)
p� = y � = p + ∆s sin(θ + ∆θ/2)
θ� ∆θ
• En utilisant les relations pour ∆s et ∆θ vues
précédemment, on obtient les équations de base de mise à
jour de position odométrique pour un robot unicycle:
∆s +∆s � �
∆sd −∆sg
d
2
g
cos θ + 2L
x
y � �
�
p = f (x, y, θ, ∆sd , ∆sg ) = + ∆sd +∆sg
sin θ +
∆sd −∆sg
2 2L
θ ∆s −∆s
d g
L49 Modèle d’erreur pour l’exactitude odométrique • Ces équations n’ont d’intérêt que pour de faibles déplacements • Plus le déplacement entre deux instants sera important, plus l’estimation de position sera grossière vis-à-vis de la réalité • A cause des erreurs d’intégration des incertitudes sur la pose et des erreurs de mouvement réalisées pendant l’incrément (∆sd , ∆sg ) l’erreur en position basée sur l’intégration de l’odométrie augmente avec le temps • Etablissons un modèle d’erreur pour la pose intégrée p� pour obtenir la matrice de covariance Σp� de l’estimé odométrique de position • Pour ce faire, on va supposer la connaissance d’une matrice de covariance Σp ∈ R3×3 initiale
50
Modèle d’erreur pour l’exactitude odométrique
• Pour l’incrément de mouvement des roues (∆sd , ∆sg ) la matrice Σ∆ doit être
connue aussi:
� �
kd |∆sd | 0
Σ∆ = cov(∆sd , ∆sg ) =
0 kg |∆sg |
où
kd , kg sont des constantes représentant les parametrès non
déterministes du moteur et de l’interaction de la rue avec le sol
• Deux hypothèses sont englobées dans l’équation précédente:
• Les erreurs de chaque roue sont indépendantes
• Les variances des erreurs sont proportionnelles à la valeur absolue des
distances parcourues
• Ces hypothèses, bien qu’imparfaits, sont satisfaisantes dans la plupart des cas
en environnement structuré. Les sources d’erreur sur le mouvement sont:
roue déformée, glissement, sol non lisse, encodeurs imprécis, etc.
• Les valeurs des constants kd , kg dépendent du robot et de l’environnement
et ils sont déterminées expérimentalement51
Modèle d’erreur pour l’exactitude odométrique
• En admettant que p et ∆dg = [∆sd , ∆sg ]T ne sont pas corrélés et que la
dérivée de f est bien approximée par la décomposition de Taylor du premier
ordre (linéarisation), on peut appliquer la loi de propagation d’erreur, obtenant:
Σp� = ∇p f · Σp · (∇p f )T + ∇∆dg f · Σ∆ · (∇∆dg f )T
• La matrice Σp est directement égale au Σp� précédent (et il peut être calculée
en spécifiant une valeur initiale, ex. zéro)
• Connaissant f on peut exprimer les deux jacobiens ∇p f , ∇∆dg f :
� � 1 0 −∆s sin(θ + ∆θ/2)
∂f ∂f ∂f
∇p f = = 0 1 ∆s cos(θ + ∆θ/2)
∂x ∂y ∂θ
0 0 1
1 ∆s 1 ∆s
� � 2 cos(θ + ∆θ/2) − 2L sin(θ + ∆θ/2) 2 cos(θ + ∆θ/2) + 2L sin(θ + ∆θ/2)
∂f ∂f
∇∆dg f = = 12 sin(θ + ∆θ/2) + ∆s
2L cos(θ + ∆θ/2) 1
2 sin(θ + ∆θ/2) − ∆s
2L cos(θ + ∆θ/2)
∂∆sd ∂∆sg
1/L −1/L52
Modèle d’erreur pour l’exactitude odométrique
• Les figures ci-dessous montrent typiquement comment croissent les incertitudes sur
la position au cours du temps (l'incertitude de l'orientation n'est pas représenté dans
l'image, bien que son effet peut être observé indirectement)
• Les résultats ont été obtenu en appliquant le modèle de propagation d’erreurs
précédent et en représentant la matrice de covariance par une ellipse d’incertitude
(décomposition en valeurs propres de Σp� )
Mouvement linéaire Mouvement circulaire (rayon const.)53
Remarques
• L’incertitude dans la direction perpendiculaire au mouvement croît plus vite
que dans le sens du mouvement. Ce résulte de l’intégration de l’incertitude
en orientation
• L’axe principal de l’ellipse d’incertitude ne reste généralement pas exactement
perpendiculaire à la direction du mouvement
Mouvement linéaire Mouvement circulaire (rayon const.)54
Calcul des ellipses d'incertitude
La decomposition d’une matrice carrée en valeurs et vecteurs propres est un
outil de base que l’on trouve dans de nombreuses disciplines (ex. Google PageRank)
Définition
Un vecteur non nul u ∈ Rn est un vecteur propre d'une matrice A ∈ Rn×n
si et seulement si il existe un scalaire λ tel que :
Au = λu
où λ est appelé valeur propre associée à u . L'ensemble constitué des vecteurs
propres de valeur propre λ , et du vecteur nul, est appelé le sous-espace propre
de u associé à la valeur propre λ
On détermine les valeurs et vecteurs propres en résolvant l’équation:
(A − λ In )u = 0
Remarque
Les valeurs propres d'une matrice symétrique (c.-à.-d. A = AT ) sont réelles
et tous ses vecteurs propres sont orthogonaux55
Calcul des ellipses d'incertitude
En définissant les deux matrices n × n suivantes:
Λ = diag(λ1 , λ2 , . . . , λn ), U = [u1 u2 · · · un ]
où
λ1 , λ2 , . . . , λn valeurs propres de la matrice A agencées par ordre
décroissant
u1 vecteur propre associé à la valeur propre de A la plus
forte (c.-à.-d. λ1 )
on peut écrire:
AU = UΛ56
Calcul des ellipses d'incertitude
Exemple:
1 −2 4
A = −2 5 3
5 3 −1
Valeurs propres ordonnées: 6.2340, 4.5491, -5.7830
6.2340 0 0 −0.1305 −0.7832 −0.5494
Λ = 0 4.5491 0 U = 0.9445 0.2657 −0.3170
0 0 −5.7830 0.3015 −0.5621 0.7731
Commande Matlab:
[U, Lambda] = eig(A)57
Calcul des ellipses d'incertitude
• Le façon commune de représenter l’incertitude de localisation en deux dimensions
(plan du sol) mais à trois degrés de liberté (position 2D et orientation) est l’ellipse
d’incertitude autour de la position estimée
• La position réelle du robot, si les paramètres du modèle d’erreur ont été bien
choisis, doit se trouver dans cette ellipse
• En appliquant la décomposition en valeurs/vecteurs propres de Σp� , on obtient
les deux matrices U et Λ d'où:
Σp� U = UΛ
• En prenant le vector propre u1 associé à la plus forte valeur propre λ1 de Σp�
on obtient l’axe principale de l’ellipsoïde 3D d’incertitude
Remarque
Par définition, une matrice de covariance est une matrice symétrique et
semi-définie positive (donc les valeurs propres sont réelles et non négatifs)58
Calcul des ellipses d'incertitude
• Les coordonnées u1,x et u1,y du vecteur u1 permettent de déduire
l’orientation de l’ellipse dans le plan du sol:
� �
u1,y
θ = arctan
u1,x
• En pratique, on préfèrera l’utilisation de la fonction atan2 , qui teste dans
quel quart se trouve la position (u1,x , u1,y ) pour que θ ait un signe cohérent
• La longeur des demi-axes de l’ellipse est définie par la racine carrée des
deux valeurs propres de Σp� les plus fortes, c.-à.-d. λ1 et λ2
• Cependant, λ1 et λ2 représentant en fait des variances. Par exemple, si les
paramètres du modèle d’erreur sont corrects, pour être sûr à 99.7% que la
position réelle se situe dans
� l’ellipse
� d’incertitude, les demi-axes de celle-ci
auront pour longeurs 3 λ1 et 3 λ2 , respectivement59
�
3 λ2
�
3 λ1 Cf. TD1
θ Ellipse d’incertitude ( 3σ)
u1,y
Si x est une variable aléatoire qui suit la loi
u1,x normale (ou gaussienne), µ est l’espérance
de la loi de probabilité, et σ 2 est la variance:
N (µ, σ 2 )
Pr(µ − σ ≤ x ≤ µ + σ) � 0.6827
Pr(µ − 2σ ≤ x ≤ µ + 2σ) � 0.9545
Pr(µ − 3σ ≤ x ≤ µ + 3σ) � 0.9973
..
.
Pr(µ − 5σ ≤ x ≤ µ + 5σ) � 0.999999460 Odométrie … et les humains? • Nous “savons” la longueur de nos jambes et l’étendue du mouvement des nos articulations depuis notre adolescence • La longueur des notres étapes est donc “codée” dans notre cerveau (bien que nous ne sommes pas complètement au courant) • Nous pouvons estimer assez précisément la distance parcourue • Même sans rétroaction visuelle (et sans compter les étapes), on a une bonne précision avec distances jusqu'à 27 m [Andre et Rogers, 2006]
61
Plan du chapitre
• Introduction et défis Partie 1
• Odométrie Partie 2
• Filtrage et fusion de capteurs Partie 3
2 octobre
• Autres techniques de localisation Partie 4Vous pouvez aussi lire

















































