Mémoire de n d'études Conception et réalisation d'un microphone à directivité contrôlable et orientable
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Mémoire de
n d'études
Conception et réalisation d'un microphone à
directivité contrôlable et orientable
Etienne MONTPIED
Directeur Interne : Mohammed Elliq
Directeur Externe : Paul Payen de La Garanderie
Rapporteur : Laurent Millot
École nationale supérieure Louis-Lumière
Mai 2019
1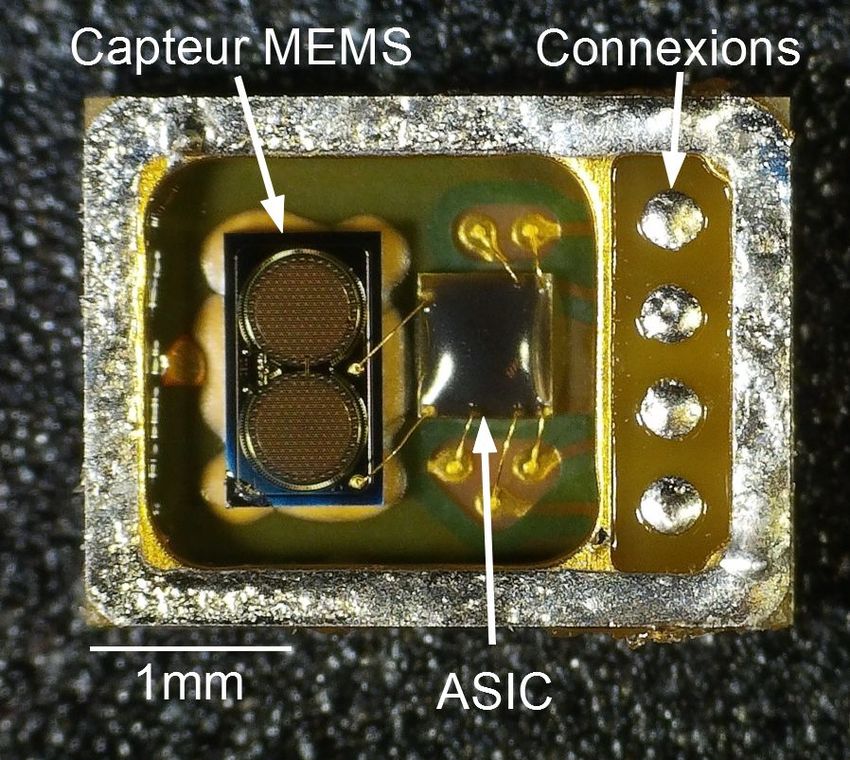
2

Résumé
L'avènement des outils, aussi bien matériels que logiciels, de traitement du
signal numérique a permis de nombreuses avancées technologiques, notamment
l'apparition du beamforming ; ce procédé permet de contrôler
nement la direc-
tivité de signaux ondulatoires, comme les ondes sonores, à partir d'un réseau de
capteurs. Les applications sont nombreuses dans les domaines des télécommuni-
cations, de l'industrie, de la recherche... Cependant, cette technologie n'est que
peu appliquée au monde de l'audio professionnel, malgré ses apports potentiels.
Après un état de l'art des techniques de directivités utilisées dans le monde
audio professionnel, ce mémoire étudiera une application possible du beamfor-
ming dans ce domaine en réalisant un prototype de microphone à directivité
contrôlée utilisant ce procédé.
La réalisation de ce projet est rendue possible grâce à la démocratisa-
tion de deux choses : les microphones MEMS qui présentent des caractéristiques
techniques idéales à des prix abordables et, les plateformes et outils de dévelop-
pement de FPGA permettant une facilité de mise en ÷uvre des algorithmes de
traitements numérique de signaux nécessaires.
Mots-clés
Microphone. Formation de faisceaux. Directivité. Traitement du numéri-
quesignal . MEMS. FPGA.
3
Abstract
The emergence of digital signal processing has allowed several technological
progress, especially beamforming. This technique can be used to have a precise
control of wave signals directivity, like sound waves, from an array of sensors.
There are a lot of applications in several
elds like telecommunications, industry,
research... Nevertheless, this technique is nearly absent of the professional audio
eld, despite of its potential bene
ts.
After an historical overview of the directivity technique used in the profes-
sional audio
eld, this master thesis will study a possible application of beamfor-
ming in this
eld. A prototype of a microphone with controllable directivity will
be built using this technique.
The feasibility of this project is due to the democratization of two things :
MEMS microphones that full
ll all the requirements in term of technicals carac-
teristics for a low price and, the availability of tools and development for FPGA
that help the implementation of the necessary beamforming algorithms.
Keywords
Microphone. Beamforming. Directivity. Digital signal processing. MEMS.
FPGA.
4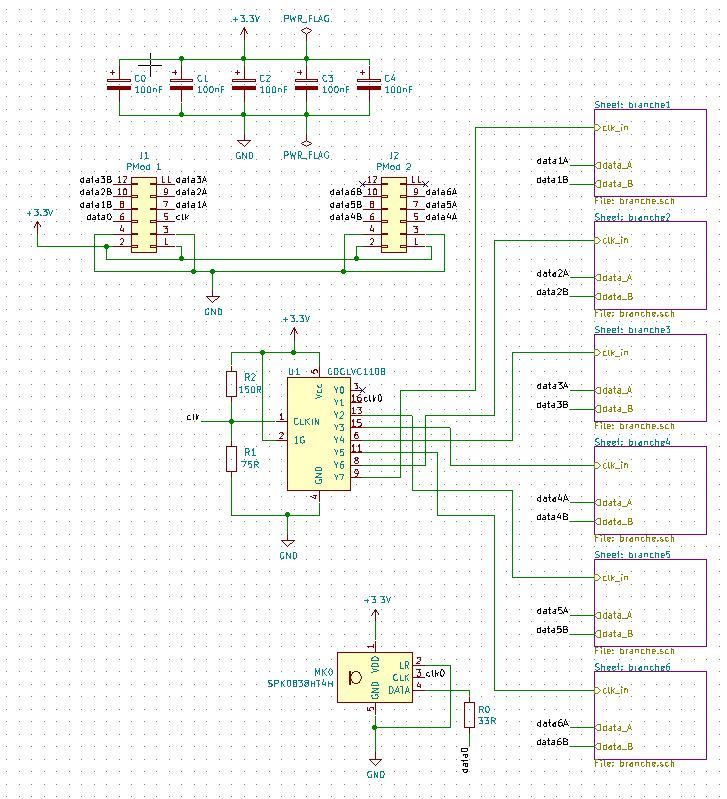
5
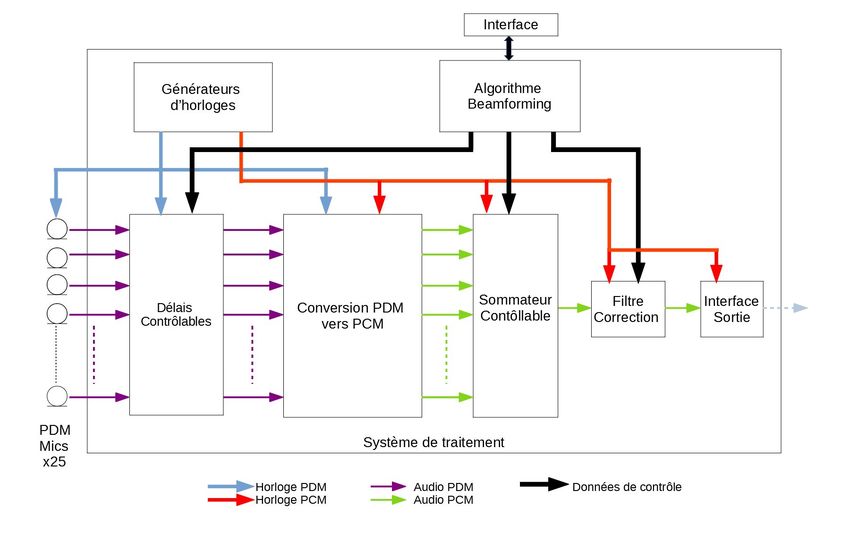
Table des matières
I Historique et rappels technologiques 13
1 Les diérentes technologies de microphone 14
1.1 Équations et diagrammes polaire . . . . . . . . . . . . . . . . . 16
1.2 Obtention de la directivité . . . . . . . . . . . . . . . . . . . . . 17
1.2.1 Capteur à gradient de pression . . . . . . . . . . . . . . 17
1.2.2 Capteur de pression . . . . . . . . . . . . . . . . . . . . 18
1.2.3 Directivités intermédiaires . . . . . . . . . . . . . . . . . 19
1.2.4 Autres technologies . . . . . . . . . . . . . . . . . . . . 21
1.3 Microphone à directivité réglable . . . . . . . . . . . . . . . . . 22
1.3.1 De façon mécanique . . . . . . . . . . . . . . . . . . . . 23
1.3.2 De façon électronique . . . . . . . . . . . . . . . . . . . 23
2 Antenne microphonique 25
2.1 Dé
nition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Caractéristiques . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Beamforming ou formation de faisceaux 26
3.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 Historique et utilisation . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Beamforming à l'aide de retards et de sommation . . . . . . . . . 28
3.3.1 Broadside array ou réseau à rayonnement transversal . . . 28
3.3.2 Réseau à rayonnement longitudinal (end
re array). . . . . 29
II Conception du microphone à directivité contrôlable 33
6
4 Cahier des charges 34
4.1 Objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Contraintes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Architecture générale 35
5.1 Conception de l'antenne microphonique . . . . . . . . . . . . . . 36
5.1.1 Beamforming . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2 Choix des capteurs . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2.1 Cahier des charges . . . . . . . . . . . . . . . . . . . . . 38
5.2.2 La technologie MEMS . . . . . . . . . . . . . . . . . . . 39
5.2.3 Interfaçage : I2S et PDM . . . . . . . . . . . . . . . . . 41
5.2.4 Réalisation pratique de l'antenne . . . . . . . . . . . . . 42
5.3 Conception de l'unité de traitement des signaux . . . . . . . . . 43
5.3.1 Matériel . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3.2 Synoptique général du traitements des signaux . . . . . . 46
III Démonstration du prototype 47
IV Conclusion 49
7
8
Liste des abréviations :
ARM : Advanced RISC Machine ou Machine Avancée à Processeur à
Jeu Réduit d'Instructions
ASIC : Application Speci
c Integrated Circuit ou Circuit Intégré à Ap-
plication Speci
que
AXI : Advanced eXtensible Interface ou Interface Avancée eXtensible
CEM : Compatibilité électromagnétique
CMS : Composants Montés en Surface
FPGA : Field Gate Programmable Array ou Circuit Logique Program-
mable
IC : Integrated Circuit ou Circuit Intégré
I2S : Inter-IC Sound ou Son entre Circuits Intégrés
MEMS : Micro ElectroMechanical System ou Micro Système Electro-
mécanique
PCM : Pulse Code Modulation ou Modulation par Impulsions Codées
PDM : Pulse Density Modulation ou Modulation par Densité d'Impul-
sions
PS : Processing System ou Système de Traitement
PL : Programmable Logic ou Logique Programmable
PZM : Pressure Zone Microphone ou Microphone à Zone de Pression
RISC : Reducted Instructions Set Computer ou Processeur à Jeu Réduit
d'Instructions
VHDL : VHSIC Description Language ou Language de Description pour
Circuit Intégré à Très Haute Vitesse
VHSIC : Very High Speed Integrated Circuit ou Circuit Intégré àTrès
Haute Vitesse
9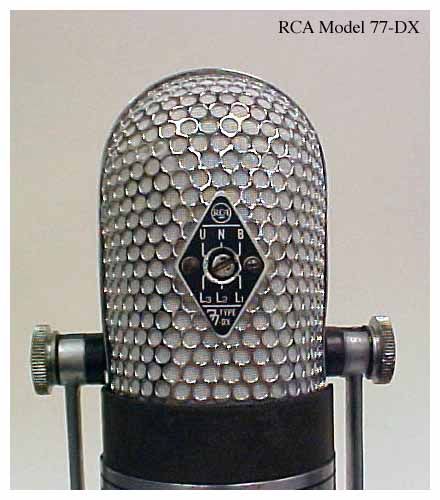
10
Introduction
Les technologies pour rendre directionnel la captation du son ont beau-
coup évolués. Au début du XXème , la directivité n'était pas la préoccupation
première des ingénieurs qui étaient concentrés sur la
délité des microphones
en testant diérentes technologies de capteurs. Les microphones étaient soit
omnidirectionnels, soit bidirectionnels mais dans les années 20 sont apparus les
premiers microphones unidirectionnels (cardioïdes). Beaucoup d'autres directivi-
tés intermédiaires sont ensuite apparues ainsi que des microphones à capsules
interchangeables voire à directivités réglables grâce à des systèmes mécaniques.
Ensuite, les évolutions de l'électronique ont permis de pouvoir combiner les si-
gnaux de deux capteurs distincts au sein du même microphone, ce qui permet
d'obtenir une grande variété de directivités de manière aisée.
Dans le monde de l'audio professionnel, les microphones modernes reposent
encore sur ces technologies alors que dans les domaines de l'industrie et de la
recherche, de nouvelles techniques d'obtention de directivités se sont beaucoup
développés, notamment la formation de faisceaux (ou beamforming en anglais).
Cette technologie apparue dans les années 70 dans le domaine des télécommuni-
cations est liée avec le développement du traitement du signal numérique. Cette
technologie utilise un nombre important de capteurs (le plus souvent omnidirec-
tionnel) et les combine pour créer virtuellement une directivité. Ce procédé est
aujourd'hui très utlisé dans diérents domaines : le WiFi, les réseaux de télé-
phonie mobiles, les microphones des ordinateurs portables et des téléphones, la
métrologie acoustique...
Par contre, malgré ses apports potentiels, en termes de directivité, par
exemple, ce procédé est quasiment inutilisé dans le domaine de l'audio profes-
sionnel non par désinterêt mais à cause de la di
culté de mise en place du
dispositif, la complexité des traitements dont il a besoin, de la méconnaissance
de ce dispositif par les ingénieurs du son, entre autres.
Un des objectifs de ce mémoire est de proposer un dispositif de prise de
son utilisant ce procédé.
11La première partie de ce travail consistera à faire un état de l'art des
technologies de directivités existantes ainsi que d'étudier les concepts de base du
beamforming.
La deuxième partie sera consacrée à la conception du microphone à direc-
tivité variable. Un cahier des charges sera rédigé a
n de justi
er l'ensemble des
choix techniques mis en ÷uvre.
La dernière partie sera dédié aux tests de notre prototype de microphone
a
n de savoir si il répond au exigences du cahier des charges dé
ni auparavant.
12Première partie
Historique et rappels
technologiques
13Dans cette première partie, nous allons tout d'abord faire un état de l'art
des technologies de microphone et de directivité utilisés dans le monde audio
professionnel. Nous aborderons ensuite le concept d'antenne microphonique et
nous
nirons en présentant le principe du beamforming grâce à l'étude de deux
algorithmes simples.
1 Les diérentes technologies de microphone
Le microphone est un transducteur électroacoustique, c'est-à-dire un dispo-
sitif qui transforme un signal sonore en signal électrique, il en existe de diérentes
technologies. :
1. Le microphone à charbon : inventé simultanément par Berliner,
Edison et Hugues dans le débuts des années 1870, il a été utilisé
dans la téléphonie quelques années plus tard. Il est constitué des grains
de charbon con
nés entre deux électrodes soumises à une tension élec-
trique dont l'une sert de membrane. Cette dernière capte les variations
de la pression de l'air et les transmet aux grains de charbon. En se
rapprochant les uns des autres, les grains de charbon se compriment
et augmente la conductivité électrique du charbon. La compression
des grains est proportionnelle à la pression de l'air exercé sur la mem-
brane. Cette technologie est peu coûteuse mais ses caractéristiques
acoustiques sont médiocres (bruit de fond élevé et mauvaise réponse
en fréquence) ce qui l'a rendue désuète surtout avec l'avènement des
microphones à electret.
2. Le microphone piézoélectrique : C'est Pierre et Marie Curie qui
découvre en 1880 que certains matériaux (notamment les cristaux de
quartz) produisent un courant électrique lorsqu'il sont comprimés : l'ef-
fet piézoélectrique. Le chercheur français Pierre Langevin réussit
à l'utiliser pour en faire un transducteur pour un prototype de sonar
pendant la première guerre mondiale. De nombreuses tentatives de mi-
crophones ont été réalisées en associant une membrane au cristal piézo-
électrique mais les performances n'étaient pas à la hauteur notamment
14à cause du signal de sortie trop faible et des piètres performances des
pré-ampli
cateurs de l'époque. Cette technologie est encore utilisée de
nos jours dans les microphones dit "de contact" pour capter directe-
ment la vibration d'un système mécanique, c'est le cas des guitares
électroacoustiques, des instruments à corde, des percussions...
3. Le microphone dynamique : Breveté en 1874 par Ernest Siemens et
popularisé dans les années 30, ce dernier utilise la membrane solidaire
d'une bobine placée dans un champ magnétique créé par un aimant
permanent. Le mouvement de la bobine engendre un signal électrique
qui varie en fonction de la pression exercée sur la membrane. C'est
une technologie très utilisée en audio professionnel car les microphones
dynamiques sont très robustes, résistent à l'humidité et à de forts ni-
veaux sonores ; ils ne nécessitent pas d'alimentation pour fonctionner.
En revanche, ils ont une courbe de réponse en fréquences peu régulière
et une sensibilité faible.
4. Le microphone à ruban : Ce microphone utilise le même principe phy-
sique que le microphone dynamique mais le système membrane et bo-
bine est remplacé par un ruban métallique très
n ce qui permet de
réduire la masse mobile. Ce type de microphone a de très bonnes per-
formances en acoustiques en terme de réponse aux transitoires mais il
est extrêmement fragile. Il requiert aussi un étage de pré-ampli
cation
performant car son signal de sortie est très faible. C'est un microphone
très utilisé et apprécié en studio d'enregistrement.
5. Le microphone électrostatique, Découvert en 1926 par les laboratoires
Bell, il est constitué deux armatures métalliques dont l'une est souple,
légère et mobile (constitue la membrane) et l'autre est
xe (constitue
la contre électrode). Les deux armatures du condensateur ainsi formé
sont polarisées par une tension continue. Sous l'eet des ondes sonores
qui frappent la membrane, la distance entre les deux armatures change
et par la même change la capacité du condensateur. La variation de
la capacité en fonction de la pression est récupérée sous la forme d'un
signal électrique. Ce type de microphone est très utilisé en audio profes-
15sionnel car il possède d'excellentes performances en terme de réponse
en fréquences et en sensibilité.
1.1 Équations et diagrammes polaire
La directivité d'un microphone est sa capacité à capter un son de façon
prépondérante dans une ou plusieurs directions données. Elle est dé
nie mathé-
matiquement comme une fonction h dépendante de l'angle d'incidence θ. Son
expression est :
S(θ)
h(θ) =
Saxe
Elle est souvent donné en décibel car l'échelle logarithmique est plus facile à lire
et correspond mieux à ce que notre oreille perçoit. Voici son expression :
S(θ)
Lh (θ) = 20 log
Saxe
S étant la sensibilité du microphone fonction de l'angle d'incidence θ et
Saxe la sensibilité du microphone dans l'axe de référence (θ = 0). h(θ) est dé
nie
en coordonnées polaires ; son tracé représente le diagramme de directivité. Par
exemple, un microphone omnidirectionnel (qui possède une sensibilité égale pour
tout angle d'incidence) à pour équation : h(θ) = 1. Son diagramme de directivité
est représenté sur la
gure 1.
16Figure 1 Diagramme de directivité d'un microphone omnidirectionnel.
1.2 Obtention de la directivité
La directivité d'un microphone dépend du mode d'attaque de la mem-
brane par la pression acoustique (mode d'action) ; on distingue les microphones
à pression et à gradient de pression.
1.2.1 Capteur à gradient de pression
Si l'on dispose une membrane en champ libre, on obtient un capteur à
gradient de pression car la pression résultante dépend de la diérence de pression
entre les deux côtés de la membrane. Si une onde acoustique arrive perpendi-
culairement à la membrane, la diérence de pression entre les deux faces de
17la membrane sera importante et donc la pression résultante sera élevée. En re-
vanche, si l'onde arrive parallèlement à la membrane, il n'y aura pas de diérence
de pression entre les deux côtés du capteur et donc la pression résultante sera
théoriquement nulle. Ce microphone est bidirectionnel ; sa courbe de directivité
comporte deux lobes. Sa directivité est décrite par l'équation polaire suivante :
h(θ) = cos(θ)
Son diagramme de directivité est représenté sur la
gure 2.
Figure 2 Diagramme de directivité d'un microphone bidirectionnel.
1.2.2 Capteur de pression
Si l'on contraint l'un des côtés de la membrane par une cavité fermé her-
métiquement, la sensibilité va dépendre uniquement de la pression appliquée sur
18la face avant de la membrane du microphone. De ce fait, elle sera la même dans
toutes les directions ; le microphone est donc omnidirectionnel et a pour équation
polaire :
h (θ) = 1
Son diagramme de directivité est la
gure 1 déjà présenté en exemple un
peu plus haut.
1.2.3 Directivités intermédiaires
En combinant à la fois un capteur de pression et un capteur de gradient de
pression dans une même capsule, on peut obtenir des directivités intermédiaires.
Cela se réalise en ayant toujours une cavité d'un coté de la membrane qui est
relié à l'autre côté par un chemin acoustique plus ou moins long. La longueur
de ce chemin va déterminer quelle proportion de chaque type de directivité est
utilisée.
On peut mettre en équation ce principe en introduisant un facteur a com-
pris entre 0 et 1. Lorsque a = 0 le microphone est un pur bidirectionnel donc
seulement à gradient de pression et lorsque a = 1, le microphone est un pur omni-
directionnel donc seulement un capteur de pression. Les valeurs intermédiaires de
a correspondent à un microphone utilisant à la fois les deux techniques. L'équa-
tion qui en découle est la suivante :
h (θ) = a + (1 − a) cos (θ)
La
gure 3 représente diérents diagrammes de directivité pour diérentes
valeurs de a.
On retrouve dans ces diagrammes les directivités les plus usitées. On peut
citer comme valeur remarquable la directivité cardioïde (a = 0, 5) qui a la parti-
cularité d'atténuer complètement les sons provenant de l'arrière du microphone,
19(a) Bidirectionnel, a = 0 (b) Supercardioïde, a = 0, 33
(c) Cardioïde, a = 0, 5 (d) Hypocardioïde, a = 0, 75
(e) Omnidirectionnel, a = 1
Figure 3 Exemples de diagrammes de directivité pour diérentes valeurs de
a.
20ce qui est une caractéristique très intéressante pour isoler une source sonore lors
d'une captation.
1.2.4 Autres technologies
Pour des applications particulières, d'autres technologies sont employées.
Citons à titre d'exemple le microphone canon qui utilise un tube à interférences
positionné devant une capsule hypercardioïde. Le tube est ouvert par le devant
et possède des petites ouvertures sur les côtés. Les ondes sonores provenant de
l'avant du microphone ne sont pas aectées mais celle qui provienne des côtés ne
sont plus en phase (cela est dû à la longueur du tube) et s'annulent les unes les
autres à cause d'interférences destructives. Cette technologie permet d'obtenir
une directivité très prononcé à l'avant du microphone mais c'est au détriment de
la réponse hors axe qui se retrouve détimbré car les interférences sont dépen-
dantes de la longueur d'onde et créées un phénomène de
ltrage en peigne. Ce
genre de microphone est cependant très utilisé dans les environnements bruyants
où l'on veut pointer qu'une source en particulier comme au cinéma ou pour les
prise de son d'évènements sportifs dans des stades.
Une autre solution est d'utiliser une parabole en plaçant une capsule car-
dioïde ou hypercardioïde au niveau de son foyer ; cela présente l'avantage de ne
pas générer de détimbrage hors axe mais au prix d'une directivité moins impor-
tante par rapport à un microphone canon. La parabole est très utilisée pour les
prises de sons en milieu naturel comme par exemple pour des chants d'oiseaux
ou des cris d'animaux.
Une dernière solution plus radicale est la technologie des microphones de
surface (Boundary Microphone ou PZM : Pressure Zone Microphone en anglais).
Le principe est que, plutôt que de lutter contre les ré
exions contre les surfaces
qui ré
échissent les ondes sonores et peuvent facilement ruiner un enregistrement
en intérieur ; on place une capsule omnidirectionnelle la plus proche de la surface
ré
échissante (cela peut-être un mur ou le sol, par exemple) ce qui permet de
d'aranchir complètement du problème de ré
exions des ondes sonores sur cette
surface. De plus, cela a un gros avantage car proche d'une surface plane, le niveau
21(a) Exemple de microphone canon : le MKH 416 (b) Exemple d'un kit de (c) Exemple de microphone de sur-
de Sennheiser microphone à parabole à face : le Beta 91 de Shure
utiliser avec le ME62 de
Sennheiser
Figure 4 Exemple de microphones à directivité atypique.
sonore est augmenté de 3 dB par eet de surface, on obtient donc un microphone
virtuellement plus sensible. Ce genre de microphone à donc une directivité de 180°
avec une réponse en fréquence très homogène. C'est un microphone souvent
utilisé en captation de voix ou de pas de danse sur une scène car il est très
discret en étant posé au sol, c'est aussi un microphone privilégié pour capter le
son à l'intérieur d'une grosse caisse.
1.3 Microphone à directivité réglable
Le principe d'avoir un microphone à directivité réglable n'est pas nouveau,
le premier microphone à condensateur commercial, le CMV3 de Neumann propo-
sait déjà des capsules interchangeable de directivités diérentes. Il faut attendre
les année 40 pour avoir des systèmes possédant un sélecteur permettant de choi-
sir la directivité souhaitée sans avoir à changer les capsules. Il en existe de deux
types :
221.3.1 De façon mécanique
La première méthode utilisée pour faire varier la directivité d'un microphone
fût l'utilisation de systèmes mécaniques qui modi
ent les chemins acoustiques
entourant la membrane. En ouvrant plus ou moins la cavité arrière et en chan-
geant plus ou moins la longueur du chemin acoustique la reliant à l'extérieur, il
est possible d'obtenir toutes les directivités présentés.
L'exemple le plus connu est le microphone à ruban RCA Type 77-DX da-
tant de 1954. Il possède un sélecteur à l'arrière qui permet de sélectionner parmi
ces directivités : non directionnel (omnidirectionnel), unidirectionnel (cardioïde)
et bidirectionnel ainsi que 3 autres positions intermédiaires (L1, L2 et L3). Le
système se compose d'un diaphragme qui en tournant ouvre ou ferme des che-
mins d'un labyrinthe acoustique. Des photographies de ce système ainsi que les
diagrammes de directivités mesurés sont représenté sur la
gure 5.
Les microphones modernes n'utilisent quasiment plus ce système, les avan-
cées technologique dans l'électronique ont permis d'avoir des systèmes moins
couteux et fragiles.
1.3.2 De façon électronique
L'autre façon de réaliser un variation de directivité est d'utiliser deux cap-
sules cardioïde côte-à-côte. Deux signaux électriques distincts sont donc récupéré
puis mélangés électroniquement. Si l'on somme simplement les deux capsules, on
obtient une directivité omnidirectionnelle, en revanche si l'on inverse la phase de
l'un des signaux avant de faire la sommation, on obtient une directivité cardioïde.
Cela s'explique par le fait que les signaux latéraux vont être captés par les deux
capsules à la fois et donc vont être en opposition phase et s'annuler lors de la
sommation, alors que les signaux dans l'axe ne seront captés que par une seule
capsule à la fois. En faisant varier le gain de chaque signal avant la sommation
on peut donc obtenir toutes les directivités intermédiaires
Depuis la popularisation du transistor puis des circuits intégrés, ces opéra-
tions, inversion de phase et sommation avec des gains variables, sont très simples
23(a) Photographie du microphone avec son (b) Photographie du diaphragme
sélecteur de directivité. acoustique
(c) Diagrammes de directivité associés
Figure 5 RCA Type 77-DX.
24(a) Le U87 de Neumann (b) Le C414 de Akg ou le réglage électronique de
directivité est visible
Figure 6 Photographies de microphone à directivité réglable électronique-
ment.
à mettre en ÷uvre et peu couteuses. Cela explique la grande popularité de ce
type de microphones, notamment dans les studios d'enregistrement. Le U87 de
Neumann et le C414 de AKG en sont des exemples courants.
2 Antenne microphonique
2.1 Dé
nition
On appelle antenne microphonique (microphone array en anglais) tout as-
semblage de microphones conçu pour fonctionner ensemble.
Un couple de microphone ou un microphone à directivité réglable à deux
membranes sont par dé
nition des antennes microphoniques mais cela n'a pas
beaucoup d'intérêt. Cette notion prend tout son sens pour de grands réseaux de
plusieurs dizaines de capteurs
252.2 Caractéristiques
Les caractéristiques importantes d'une antenne microphonique sont :
La directivité des capteurs utilisés : le plus souvent les antennes utilisent
des capteurs omnidirectionnels mais certaines applications peuvent né-
cessiter des capteurs cardioïdes.
Le nombres de capteurs.
La dimension spatiale de l'antenne : Cela correspond à la dimension de
l'espace dans lequel les capteurs sont répartis. S'ils sont disposés sur une
ligne, l'antenne n'est qu'à une seule dimension ; sur un plan, l'antenne
sera de dimension 2 et si les capteur sont disposé dans l'espace tout
entier, l'antenne sera de dimension 3.
La géométrie de l'antenne : la disposition des microphones va dépendre
de l'utilisation que l'on souhaite de l'antenne. Cela peut être en ligne, en
grille, en cercle, en sphère... Chaque géométrie va avoir ses avantages
et inconvénients en fonction de l'utilisation.
Une antenne microphonique est reliée à un système d'acquisition des donnés,
elles peuvent être traités en temps réel ou bien stocké pour les analyser plus
tard.
3 Beamforming ou formation de faisceaux
3.1 Principe
Le beamforming est une technique de traitement du signal utilisée pour
émettre ou recevoir des signaux de nature ondulatoire à partir d'un réseaux
d'émetteurs ou de récepteurs. Le principe consiste à contrôler la phase entre
chaque élément du réseau a
n de créer des interférences constructives et des-
tructives qui permette de créer virtuellement une sélectivité spatiale des signaux
reçus ou émis. Elle peut s'utiliser aussi bien en émission qu'en réception avec
n'importe quel type de signaux à condition qu'ils soient de nature ondulatoire.
Ce procédé est utilisé en pratique aussi bien avec les ondes électromagnétiques
qu'avec les ondes sonores.
263.2 Historique et utilisation
Le beamforming est né pendant la deuxième guerre mondiale pour amélio-
rer les performances des antenne des radars et des sonars. La première application
avec des ondes sonores est faite par Billingsley en 1974.
Son apparition se fait conjointement avec l'apparition du traitement nu-
mérique du signal car en analogique il est quasiment impossible de faire des
traitements temporels sur les signaux. Il y avait bien les lignes à retard analo-
gique qui consistaient à écrire le signal sur une bande magnétique, par exemple,
puis de lire cette même bande juste après, le retard appliqué était fonction de la
vitesse de dé
lement de la bande mais aussi l'écartement entre la tête d'écriture
et de lecture. Ce genre de système avait des caractéristiques médiocres et intro-
duisait une dégradation du signal, de plus, le retard obtenu était bien trop long
pour pouvoir faire du beamforming.
L'avènement de la numérisation des signaux a changé la donne : le sup-
port est diérent mais le principe reste le même qu'en analogique ; on stocke le
signal entrant sous forme d'échantillon dans une mémoire tampon puis on lit ces
échantillons plus tard. La grande diérence avec l'analogique est que une fois le
signal numérisé, le fait de stocker puis de lire un échantillon n'engendre aucune
dégradations de celui-ci ; on peut donc répéter l'opération autant de fois que cela
est nécessaire. On peut obtenir avec cette méthode des délais très courts, très
précis et qui sont réglables.
De plus, le contrôle du retard ne dépend que du nombre d'échantillons
retardés et de la fréquence d'échantillonnage. La valeur du retard t en seconde
s'écrit sous la forme : t = FNs avec N le nombre d'échantillons retardés et F s
la fréquence d'échantillonnage. On remarque que cette valeur de retard ne peut
prendre que certaines valeurs car N est un nombre entier. Le pas entre deux
valeurs est égal à ∆t = F1s donc plus la fréquence d'échantillonnage est grande,
plus on peut régler
nement la valeur du retard.
Cette technologie est aujourd'hui répandue dans de nombreux domaines
tels que les réseaux cellulaires, le WiFi, les systèmes de réduction de bruits,
l'imagerie médicale.
273.3 Beamforming à l'aide de retards et de sommation
Les algorithmes de beamforming envisagés dans ce mémoire n'utilisent que
des retards et des sommations pour la partie traitement du signal ; ils en existent
d'autres types, plus complexes, mais ils ne seront pas abordés dans ce mémoire..
3.3.1 Broadside array ou réseau à rayonnement transversal
Le broadside array utilise un certain nombre de capteurs omnidirectionnels
répartis sur une ligne perpendiculaire à l'axe de la source sonore.. On suppose une
source sonore assez éloignée pour que le front d'onde soit considéré comme plan,
c'est-à-dire que que la distance entre les capteurs est très petite par rapport
à la longueur d'onde du signal émis par la source. En sommant simplement
l'ensemble des signaux des capteurs, on obtient une réponse bidirectionnelle dans
l'axe perpendiculaire à la ligne des capteurs (cela s'explique par la symétrie de la
structure de ce réseau) ; c'est pourquoi, ce type de con
guration est aussi appelé
summing array (réseau de sommation en français). Si une onde sonore arrive dans
l'axe perpendiculaire à la ligne, elle sera captée simultanément par l'ensemble des
capteurs et donc les signaux seront en phase ce qui renforcera le signal lors de la
sommation. En revanche, si elle n'est pas perpendiculaire à la ligne, une diérence
de marche va apparaitre entre les capteurs et donc les signaux ne seront plus en
phase lors de la sommation ; ce qui créera des interférences destructives. La
gure
7a représente le fonctionnement de ce type de beamforming.
L'ordre du système est égal au nombre d'éléments du réseau moins un ;
ainsi, plus l'ordre est élevé, plus le système est directionnel.
Son principal avantage est de pouvoir très facilement modi
er l'angle sous
lequel le système est directif, il su
t juste de retarder les éléments du réseau
avec une valeur croissante entre chaque capteurs adjacents. Ce principe, appelé
beamsteering, est illustré à la
gure 7b
Le défaut de ce système est que la réponse en fréquences dépend de la
direction de l'onde sonore incidente à cause, une fois de plus, des interférences
destructives créées par la sommation de signaux qui ne sont pas en phase. La
28réponse en fréquences d'un broadside array d'ordre 1 (donc à deux éléments) est
présentée en
gure 7c.
3.3.2 Réseau à rayonnement longitudinal (end
re array).
L'autre type de réseau est l'end
re array ; les éléments du réseau sont aussi
disposés régulièrement en ligne mais cette fois de façon parallèle à l'axe de la
source sonore. Pour un réseau d'ordre un, on applique un retard ∆t correspondant
au temps que met l'onde sonore pour parcourir la distance d entre les deux
éléments du réseau ; on a donc ∆t = dc avec c la célérité de l'onde (environ
340m/s, pour une onde sonore), puis l'on somme la diérence entre ces deux
signaux. Cela explique que cette con
guration est également appelée diérential
array (réseau diérentiel en français). La
gure 8a montre cette con
guration.
On obtient une directivité de type cardioïde où l'onde provenant de l'arrière est
totalement annulé. On considère une onde sonore qui rencontre un capteur 1 puis
un capteur 2 situé à une distance (d) du capteur 1. Le retard (∆t) appliqué au
capteur 2 est égal au temps mis par l'onde sonore pour parcourir cette distance
(d = ∆c ). Si l'onde sonore rencontre d'abord le capteur 2, sa position virtuelle
t
est identique à celle du capteur 1. Comme les signaux électriques que ces deux
capteurs délivrent sont identiques, le signal diérentiel est nul.
Contrairement au broadside array, il n'est pas possible d'orienter la directi-
vité mais il est possible, en revanche, d'obtenir tous les diagrammes de directivité
usuels juste en modi
ant la valeur du retard. En augmentant l'ordre du système,
il est possible d'avoir des directivités encore plus extrêmes.
La réponse en fréquences d'une telle con
guration ne dépend pas de l'angle
d'incidence de l'onde. Cependant, la réponse en fréquences globale à la forme
d'un
ltre passe-haut avec une pente de 6 dB/octave pour un ordre un. Chaque
augmentation de l'ordre d'une unité entraine une augmentation de la pente de
6 dB/octave. Cet eet de
ltrage passe-haut peut-être compensé par un
ltrage
passe-bas permettant de retrouver une réponse en fréquences plus plate. Il y
a également dans les hautes fréquences une annulation qui correspond à une
longueur d'onde égale à la distance entre les deux capteurs, il faut donc judi-
29(a) Schéma de principe du broadside array. (b) Principe du beamsteering.
(c) Réponse en fréquence d'un broadside array d'ordre 1 pour diérents
angles d'incidence.
Figure 7 Broadside Array.
30cieusement choisir cette distance en fonction de la bande passante voulue. Un
représentation de cette réponse en fréquence est donnée en
gure 8b.
31(a) Schéma de principe de l'end
re beamforming.
(b) Réponse en fréquence d'un end
re array d'ordre 1 pour diérents
angles d'incidence.
Figure 8 End
re beamforming.
32Deuxième partie
Conception du microphone à
directivité contrôlable
33La deuxième partie de ce mémoire sera consacrée à la réalisation du micro-
phone à directivité contrôlable. Dans un premier temps on dé
nira le cahier des
charges de ce prototype. En second lieu, on détaillera la conception de l'antenne
microphonique. La dernière partie sera consacrée au système de traitement du
signal, elle comportera les choix matériels eectués ainsi qu'une explication en
détail l'implémentation de l'algorithme de beamforming.
4 Cahier des charges
4.1 Objectifs
L'objectif à long terme est d'obtenir un prototype fonctionnel de micro-
phone dont la directivité peut être contrôlée de 0 à 360°. Le prototype devrait
également proposer la possibilité de changer la directivité en passant de façon
continue de l'omnidirectionnel au bidirectionnel et en permettant d'avoir les di-
rectivités intermédiaires. Le choix du type de directivité et de l'angle doivent se
faire par l'intermédiaire d'une interface conviviale et dans la mesure du possible
en temps réel. Cette interface peut être réalisée au moyen de deux potentiomètres
dont l'un contrôle le facteur de directivité et l'autre l'angle de prise de son. L'ap-
plication visée de notre dispositif est la prise de son ; la transparence du système
est une priorité ; cela implique le recours à des outils logiciels et matériels qui
engendrent une dégradation minimale du signal en termes de bande passante,
distorsion...
4.2 Contraintes
La réalisation d'une antenne microphonique est quelque chose d'assez com-
plexe. Pour du beamforming, il faut que les diérents capteurs aient une tolérance
de fabrication assez faible et qu'ils soient positionnés de façon très précise dans
l'espace. Un nombre élevé de capteurs implique une quantité très importante de
donnés à acquérir, à stocker, à traiter. et un temps de traitement très important.
34Or, le gros dé
de cette réalisation est la contrainte du temps réel ; cela
implique une captation, une acquisition, un traitement des données et en
n une
restitution avec une latence su
samment faible pour qu'elle soit quasiment im-
perceptible. Une valeur idéale serait inférieure à une dizaine de millisecondes
pour que le système soit utilisable pour des applications ou la latence est critique
(sonorisation, enregistrement avec retour au casque) en sachant que ce ne sera
qu'une seule partie du système de diusion complet dans lequel le reste de la
chaine de traitement qui aura lui aussi sa latence propre.
Ce projet requiert des connaissances dans un nombre important de do-
maines pour le mener à bout :
l'acoustique
l'électronique et plus particulièrement les techniques la conception de
circuits imprimé, de réalisation de circuits imprimés avec des compo-
sants montés en surface (CMS), la prise en compte des problèmes liés
à la compatibilité électromagnétique (CEM).
la gestion de bus de données (PDM, I2S, AXI...)
la programmation dans plusieurs langages (VHDL, C++) pour dié-
rentes architectures de processeurs (FPGA , ARM).
...
En raison de l'extrême pluridisciplinarité, la di
culté de ce projet et la contrainte
de temps pour la réalisation de ce mémoire qui est seulement de quatre mois,
il sera évidemment pas possible de réaliser l'ensemble des objectifs ci-dessus.
Cependant, ces objectifs seront là pour guider la conception et penser le prototype
sur le long terme. L'idée est aussi de pouvoir expérimenter diérentes techniques
pour se rendre compte de ce qui sera réalisable où pas.
5 Architecture générale
L'architecture générale est présenté sur la
gure 9. Les son seront captés
par une antenne microphonique, l'ensemble des signaux des microphones vont
transiter jusqu'au système de traitement des donnés central qui sera le coeur
du système. L'interface homme-machine contenant les deux potentiomètres et
35Figure 9 Synoptique de l'architecture générale du système.
peut être quelques a
chages d'informations sera aussi relié au système de trai-
tement central. En
n, ce système possèdera une interface de sortie permettant
de récupérer les signaux audio qui iront ensuite dans un système d'écoute ou de
traitement sonore.
5.1 Conception de l'antenne microphonique
5.1.1 Beamforming
Comme vu précédemment, il existe deux types de réseaux de beamforming
simple qui n'utilisent que des retards et des sommations dans le traitement : le
broadside array et l'end
re array.
Choisir le premier peut sembler idéal au premier abord car la possibilité du
beamsteering est très intéressante pour ce projet ; mais, le fait que la réponse en
36fréquences est dépendante de l'axe d'incidence rend ce choix caduque, et c'est
sans compter la nature bidirectionnelle de la réponse d'un tel réseau.
Il nous reste donc à utiliser un end
re array. En choisissant correctement
la distance entre les capteurs et en utilisant un
ltre de correction de la réponse,
ce type de réseau convient pour notre application en termes de réponse en fré-
quences. De plus, la possibilité de pouvoir simplement faire varier la directivité
en ajustant seulement le retard appliqué au microphone correspond exactement
à ce que l'on veut réaliser. Cependant, le fait de ne pas pouvoir modi
er l'angle
sous lequel le capteur concerné voit la source sonore est un problème pour notre
projet. Le choix retenu pour le contourner consiste à utiliser plusieurs end
re
array disposés de façon circulaire ; les capteurs seront donc disposé en étoile et
chaque branche sera un end
re array. En passant d'une branche à l'autre, il sera
possible de sélectionner un angle de directivité. Pour avoir un contrôle continu
sur l'angle, il est envisagé de mixer ces diérentes branches pour obtenir un angle
intermédiaire entre deux branches. Le fait de sommer plusieurs branches ensemble
va forcément avoir des répercussion sur la directivité de l'ensemble ; c'est ce qui
va être intéressant d'expérimenter.
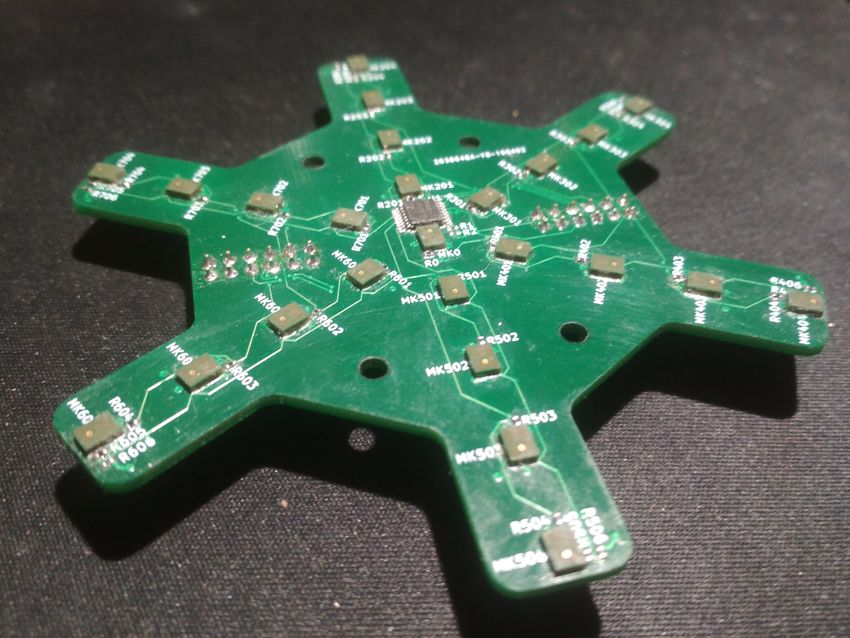
Le choix
nal est d'un total de 25 capteurs répartis de la façon suivante : un
élément central entouré de 6 branches de 4 microphones chacune ; les branches
sont réparties équitablement sur 360° ; deux branches adjacentes sont séparés
d'un angle de 3606 = 60◦ ; au sein d'une branche, la distance d entre capteurs
°
est de 12mm ce qui engendrera une annulation dans les hautes fréquences à
partir 28kHz selon la formule f = dc avec c = 340m/s la vitesse du son. Cela
n'in
uencera donc pas sur la réponse en fréquences dans bande audio comprise
entre 20 Hz et 20 kHz.
Une photographie de l'antenne réalisée est présentée
gure 10.
37Figure 10 Photographie de l'antenne microphonique réalisée.
5.2 Choix des capteurs
5.2.1 Cahier des charges
Il faut maintenant dé
nir des choix de technologies pour les capteurs et
pour le système de traitement et dé
nir l'interface qui les relient entre eux.
La solution idéale serait d'utiliser des capsules microphoniques dédiés à la
prise de son avec leurs bonne performance en termes de réponse en fréquences
et de linéarité. Par ailleurs, la disparité des diérents capteurs doit être la plus
faible possible. La contrainte de faible distance entre les capsules implique le
recourt à des capsules de petites dimensions et de faible encombrement. Le coût
des microphones de prise de son qui répondent à ces critères est excessif compte
tenu de notre budget.
Les microphones à électret apportent une réponse en termes de dimension,
de disponibilité, de robustesse et surtout de coût (5 à 50 ¿). Un microphone à
électret est un microphone de type électrostatique qui n'à pas besoin d'alimenta-
38tion fantôme (48 V, par exemple) mais a besoin d'une alimentation pour polariser
le transistor à eet de champ qu'il contient. Cependant, les microphones à élec-
tret posent des problèmes en termes de disparité, de linéarité, de distorsion...
5.2.2 La technologie MEMS
Dans les années 70, une nouvelle technique de fabrication est apparue :
la technologie MEMS. Cela consiste à utiliser les techniques de fabrication des
circuits intégrés telle que la photolithographie pour faire des systèmes méca-
niques miniatures. La miniaturisation des circuits intégrés est très avancé et per-
met actuellement d'obtenir des pistes mesurant quelque nanomètres d'épaisseur ;
cette précision peut donc être utilisée pour faire des systèmes électromécaniques
comme des relais, des accéléromètres, des micro-miroirs, des buses pour impri-
mantes à jet d'encre, des membranes pour des capteurs de pression acoustique ou
hydraulique. Le premier capteur utilisant cette technologie fut proposé et com-
mercialisé en 2011 par Analog Devices ; depuis, plusieurs constructeurs se sont
placés sur le marché proposé leur version.
Ce type de capteur satisfait beaucoup des critères requis pour ce projet :
ils sont petits (les dimensions sont en moyenne de 4 × 5 × 1 mm3 ), peu coûteux
(quelques euros), présente des caractéristiques satisfaisantes et peu de disparité
entre les diérents capteurs. De plus, ce sont ces composants peuvent être placés
directement sur un circuit imprimé ce qui permet un positionnement dans l'espace
très précis.[4]
Le capteur n'est jamais proposé seul, il est toujours accompagné d'une carte
électronique de type ASIC qui réalise les fonctions d'adaptation d'impédance, de
pré-ampli
cation et même de numérisation du signal pour certains modèles. Des
interfaces appropriées à chaque capteurs MEMS existent. La
gure11 montre une
vue interne du microphone MEMS utilisé pour ce projet.
La solution retenue est donc l'utilisation de capteurs MEMS. Le capteur
MEMS retenu dispose d'une sortie numérique. Pour notre application, le fait de
récupérer un signal déjà numérisé est un gain énorme en termes, de facilité de
transport, de temps de développement et d'encombrement car cela permet un
39Figure 11 Vue interne du Microphone MEMS SPK0838HT4H-B de Knowles.
40Figure 12 Représentation des signaux I2S et PDM.
interfaçage direct entre les capteurs et le système de traitement des données
sans avoir à passer par des étages de pré-ampli
cation de et conversion analo-
gique/numérique. Les interfaces à sorties numériques proposent principalement
deux protocoles pour le transport de l'audio : l'I2S et le PDM.
5.2.3 Interfaçage : I2S et PDM
L'I2S est un bus standardisé dédié au transport de l'audionumérique entre
circuits intégrés ; il peut transférer 2 canaux. Il utilise le PCM qui consiste à
transférer à intervalles de temps réguliers un certain nombre de bits correspondant
à la valeur d'un échantillon du signal. L'I2S a besoin de 3 lignes pour fonctionner :
une horloge, une signal de sélection du canal et un signal de données. Les données
sont cadencées par le signal d'horloge et envoyées en série avec le bit de poids fort
en premier. Les échantillons sont envoyés les uns après les autres un canal après
l'autre en fonction du signal de sélection. Les transitions de ce signal servent
également à indiquer le début d'un échantillon.
On peu choisir la fréquence d'échantillonnage et la résolution que l'on
veut, il faudra que fréquence Fsck (SerialClocK) de l'horloge soit égale à Fsck =
F s × N × 2 et que la fréquence du signal de sélection Fws (Word Select) de
canal soit égal à Fws = 2 × F s, avec F s la fréquence d'échantillonnage et N le
nombre de bit de résolution. La
gure12 représente ces trois signaux.
Le PDM est un type de codage de signal audionumérique. Les variations
de ce signal sont traduites en densités d'impulsions. L'encodage est réalisé à
41Figure 13 Représentation du codage PDM.
l'aide d'un modulateur sigma-delta. La
gure 13 représente ce codage PDM. Il
requiert que deux signaux pour fonctionner : une horloge et un bus de données.
De plus le bus de données peut être multiplexé pour transmettre deux canaux.
Les bits correspondants au premier canal seront transmis lors du front montant
de l'horloge alors que ceux du deuxième seront transmis lors du front descendant.
Le PDM présente ainsi un avantage conséquent par rapport à l'I2S en
termes de nombres de signaux requis pour l'interfaçage.
5.2.4 Réalisation pratique de l'antenne
Le capteur
nalement choisi est le microphone PDM SPK0838HT4H-B de
chez Knowles. Il possède une réponse en fréquence relativement plate jusqu'à
20kHz.
Les 25 capteurs vont donc être monté sur un circuit imprimé selon la
géométrie d'antenne dé
nie ci-dessus. Les 13 signaux PDM et le signal d'hor-
loge seront transmis vers deux connecteurs qui permettront l'interfaçage avec
42l'unité de traitement des signaux. En raison de la fréquence élevée de ces si-
gnaux (F pdm = 64 × F s donc pour F s = 48 kHz , F pdm = 3.072 M Hz ) il
faudra porter une attention particulière à leur intégrité car, à cette fréquence,
des phénomènes de ré
exions peuvent apparaitre au sein des pistes de cuivre.
C'est pourquoi le circuit imprimé comprendera à 4 couches de cuivre permettant
de gérer plus facilement l'impédance caractéristiques des pistes et de garantir
une transmission optimale des signaux. Pour le signal d'horloge, un buer sera
nécessaire pour distribuer le signal à l'ensemble des capteurs sans compromettre
son intégrité.
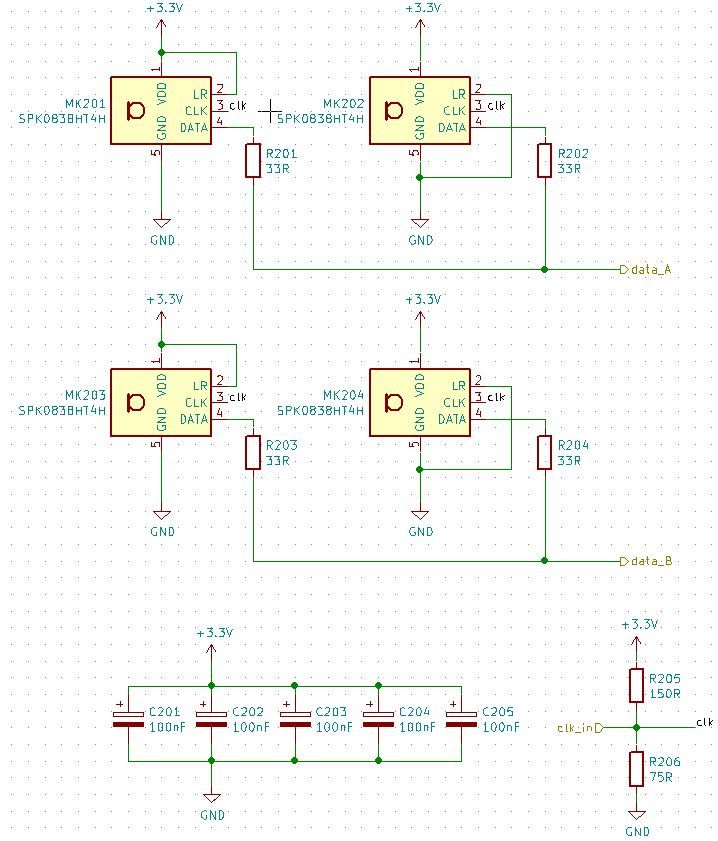
Le schéma électronique complet de l'antenne est disponible sur les
gure
14 et 15.
5.3 Conception de l'unité de traitement des signaux
5.3.1 Matériel
Le choix de la plateforme matérielle s'est porté sur une solution à base
de FPGA. Ce type de circuit fonctionne de façon très particulière par rapport
à un processeur classique. Dans un FPGA, on programme l'architecture interne
du circuit logique en fonction de nos besoins alors qu'un processeur standard à
une architecture
xe et ne se contente que d'exécuter des instructions les unes
à la suite des autres. Les FPGA sont donc adaptés au calcul de très nombreuses
données en parallèles, ce qui correspond parfaitement à ce que l'on a besoin pour
traiter les signaux provenant de l'antenne microphonique.
L'école possède des cartes de développement à base de FPGA Zynq de
chez Xilinx ; ces cartes sont su
sante pour notre projet en termes d'interfaces et
de puissance de calcul.
La programmation d'un FPGA s'eectue à l'aide d'un langage de descrip-
tion du matériel, le VHDL.
43Vous pouvez aussi lire