MODULES DE BASE - HELLO WORD - DOMAINE DU COURS MODULE IOC - MU4IN109 - 2021 FRANCK WAJSBÜRT - FRANÇOIS PÉCHEUX - SOC
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Modules de base — hello word
Module IOC — MU4IN109 — 2021
Franck Wajsbürt - François Pécheux
1
Domaine du cours
2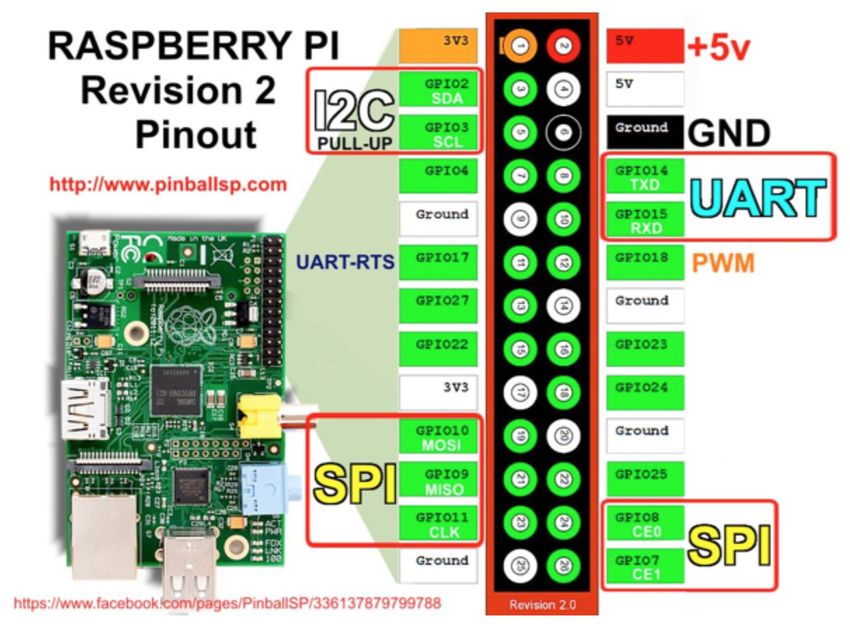
Plateforme cible
Hello world
12:54 arduino
NRF24
GPIO WIFI lumière
WEB ESP32 son
WEB SPI mouvement
Browser NRF24 WIFI
Server présence
ethernet ethernet BLE température
ESP32 led
BLE biper
Routeur web Routeur
Cours abordés
● Systèmes embarqués
● protocole filaire
● protocole radio
● Pilotes Linux
● server web
● Base de données
● Publish & Subscribe
3
Plan
● Informations sur les unités de calculs utilisées
● Périphériques passifs avec un peu d'électroniques
● Conversion Analogique ↔ Numérique
● Raspberry PI Accès aux GPIO
4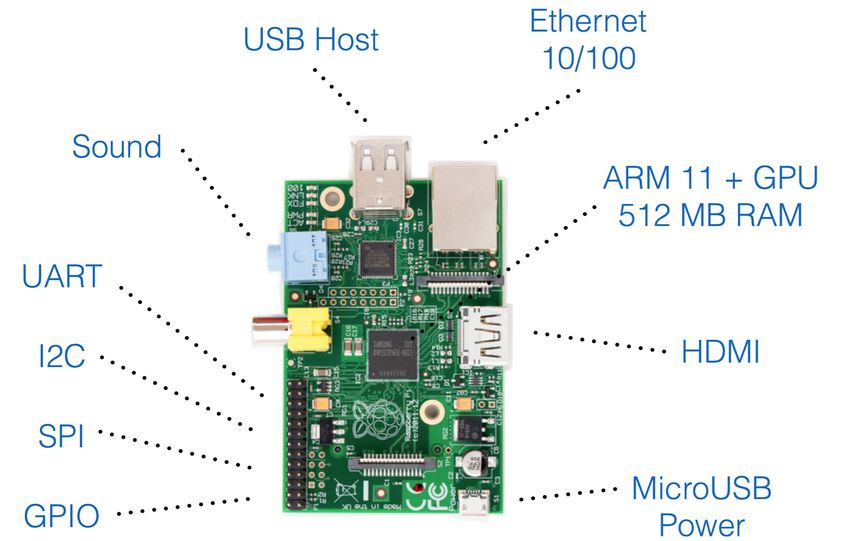
Unités de calculs
5
Nanocomputers
● Le modèle des réseaux de capteurs est constitués de nanocomputers
interconnectés en filaire ou par radio.
● Un nanocomputer est un ordinateur complet construit autour d'un SoC
(System-On-Chip) de la taille d'une carte de crédit ou ticket de métro
○ processeur(s)
○ ram + rom (flash)
○ nombreux contrôleurs d'entrées-sorties
○ périphériques d'entrées-sorties basiques (BP, LED, écran, HP)
○ connecteurs
○ chargeur de batterie
○ etc….
● Exemples utilisés en TP
○ Raspberry PI 1 et 3,
○ TTGO LoRa 32
○ Arduino nano,
6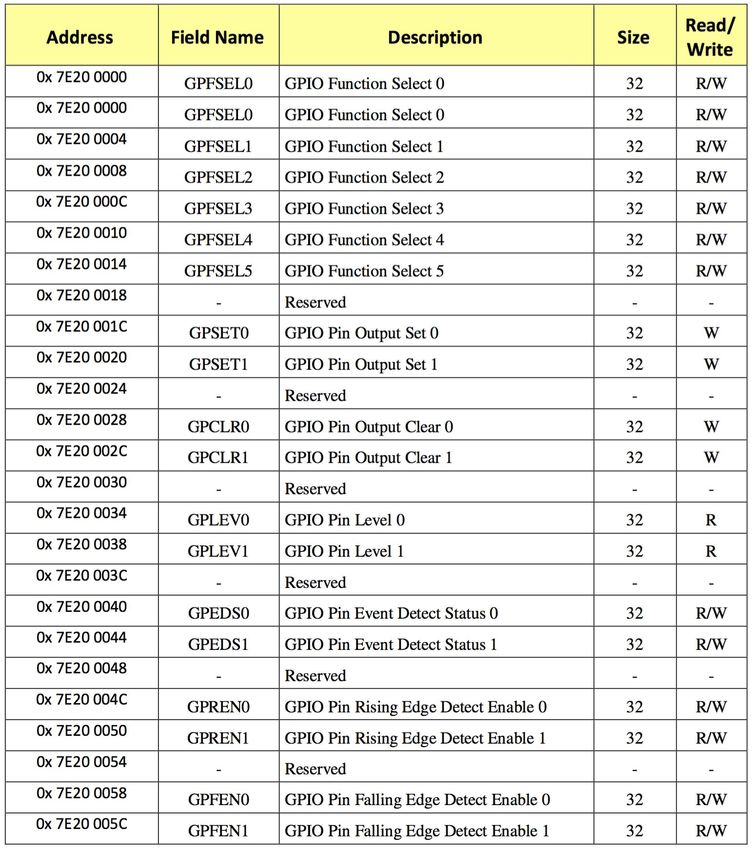
Que contient un SoC ?
Un SoC ou System-On-Chip rassemble au moins 1 cœur de calcul
des contrôleurs de périphériques et de la mémoire.
(un MCU pour Micro Controler Unit est un petit SoC)
cœur
ROM copro debug
de RAM
(flash) Crypto prog
calcul
I2C
watchdog
SPI conv.
réveil PWM GPIO
horloge
UART, analog.
WIFI
Peu de composants autour sont nécessaires pour réaliser un nanocomputer
7
les SoC contiennent beaucoup de choses !
Les documentations font des centaines de pages mais la plupart des
fonctionnalités sont abstraites par des drivers ou des API spécifiques.
Nous allons utiliser le C / C++ avec Linux et Arduino
Atmega328p BCM2835 XTENSA LX6
(Arduino) (Raspberry-Pi 1) (ESP32)
8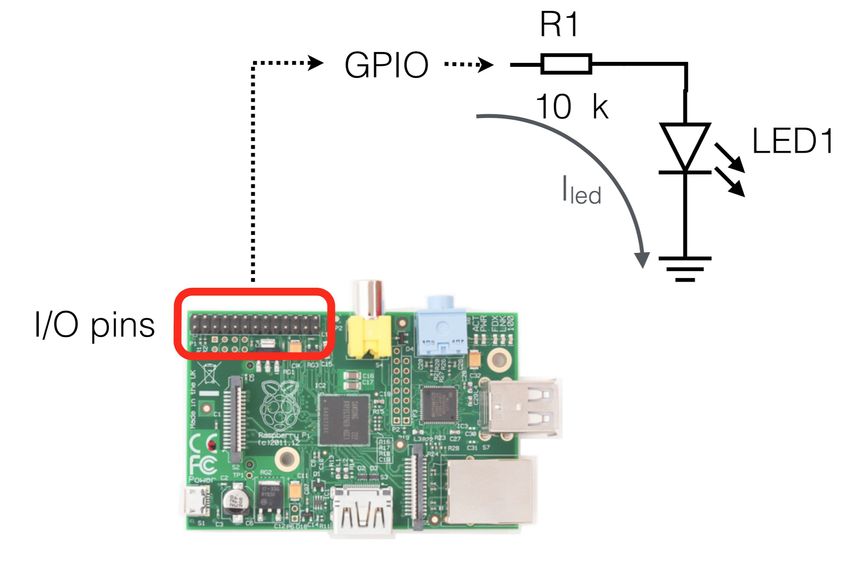
Raspberry Pi
● Université de Cambridge
● Basé sur des SoC Broadcom / ARM
● Supporte OS généralistes : Linux, Windows IOT, Android, RiscOS
● Raspberry Pi 1 est sortie en février 2012, la Rpi4 en 2019
● Modèles utilisés en TP :
● Raspberry Pi 1B (2012) ● Raspberry Pi 3 (2016)
■ BCM2835 (1 core) + GPU ■ BCM2837 (4 cores) + GPU
■ ARM V6 32 bits ■ ARM V8 64 bits
■ 700 MHz ■ 1200 MHz
■ 256 MB ■ 1024 MB
■ SDcard ■ SDcard
■ 2 USB ■ 4 USB
■ ethernet 10/100 MHz ■ ethernet 10/100 MHz,
■ HDMI FullHD + son ■ HDMI FullHD + son
■ 8 GPIO ■ 17 GPIO
■ I2C, 2 SPI, UART, PWM ■ I2C, 2 SPI, UART, PWM
■ 200mA (alim 1 A) ■ 800mA (alim 2.5 A)
■ WIFI 802.11ac, Bluetooth 4.1
9
Arduino
● Interaction Design Institute Ivrea (Italie)
● Intègre initialement des SoC (System On Chip) Atmel 8 bits
mais aussi des 32 bits : ARM Cortex-M0/M3 et Intel Quark x86
● Basé sur le projet Wiring 2003 (Hernando Barragán)
● Exécutif spécifique (Inspiré de Processing MIT 2001 pour Graphiste)
● Projet Open Source pour le code et le matériel ⇒ beaucoup de clones
● Arduino Uno (2005)
■ Atmega328p
■ 5V
■ core 8 bits
■ 16 MHz
■ Flash 32 kB + EEPROM 1 kB + SRam 2 kB
■ 14 GPIO dont 6 PWM
■ I2C, SPI, UART,
■ 8 Entrées Analogiques 10 bits
■ 20 mA + 40 mA par I/O
■ LED + 1 bouton reset
10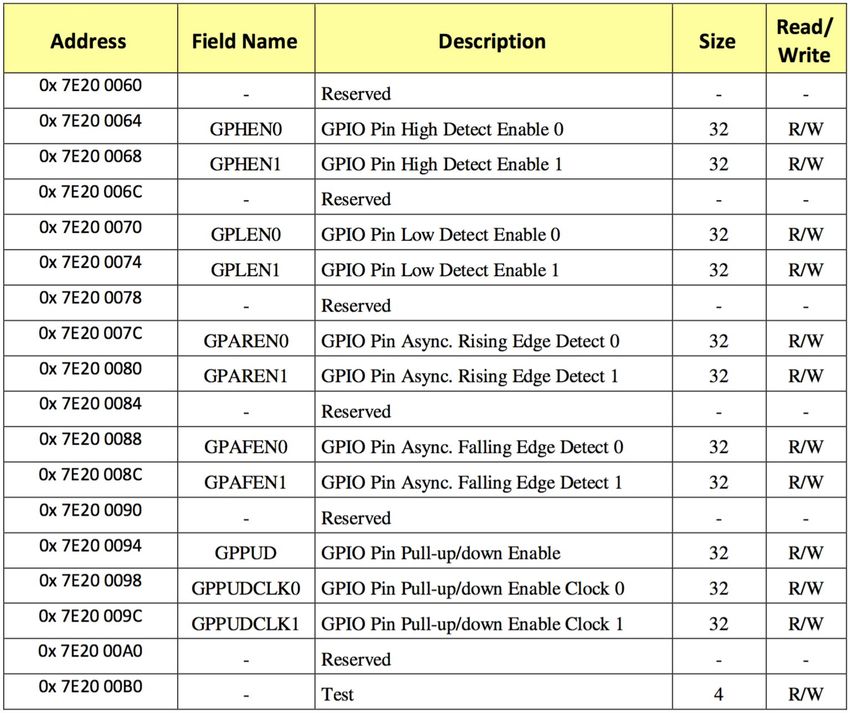
ESP32
● Espressif Systems (Shanghai)
● nanocomputers pour réseaux de capteur radio
● Intègre des SoC Xtensa dual-core (or single-core) 32-bit LX6 (2016)
● Version précédente : ESP8266 (2014)
● Plusieurs Exécutifs spécifiques SDK en C++, LUA, Python, C, Go
● Supporte Arduino et aussi Free RTOS
● Module TTGO-Lora32-Oled (Wemos)
■ XTENSA LX6
■ 3.3V
■ dual-core 32 bits
■ 240 MHz
■ Flash 32 MB
■ SRam 512 kB
■ 28 GPIO (multi-fonctions)
■ I2C, SPI, UART, 18 Entrées Analogiques (12 bits)
■ 50 mA
■ LED + 1 bouton reset
■ WIFI 802.11 bgn, Bluetooth 4.2,
■ LoRa 868 MHz (SX1276) 11
Périphériques
12
Que connecte-on à un nanocomputer ?
Les périphériques qui vont permettre de se connecter à l'environnement.
Entrées capteurs Sorties actionneurs
debug
GPIO
lumière, micro, hygromètre, moteurs CC ou PàP,
prog
mouvement, détecteur de copro
PWM
relais, HP, leds, ….
gaz, proximité, torsion,
Crypto
pression, thermomètre, conv.
accéléromètre, GPS, ...
RAM
analog.
IHM
I2C
ROM SPI
(flash) UART
WIFI
IHM
clavier, télécommande,
surface tactile, voix, ... cœur de
calcul
watchdog
réveil
horloge
écran LCD, buzzer, voix, ...
● Il existe une très grande variété de capteurs et d'actionneurs mais le nombre
d'interface est plus réduit en passant par des protocoles de communication
standard : rs232, CAN, I2C, SPI, USB, WIFI, BLE, LoRa
● Les capteurs et actionneurs contiennent souvent des µC pour simplifier
le travail de l'application ou réduire la quantité d'informations à échanger.
13
2 types de périphériques
● Périphériques passifs
Lecture / écriture directe d'une grandeur électrique numérique [0,
1] ou analogique (OV à 3.3V)
● Périphériques actifs
Un contrôleur de périphérique offrant une abstraction sous forme
de registres de contrôle accessibles par un protocole de
communication avec ou sans fils.
En général, ces périphériques intègrent ... un micro-contrôleur...
14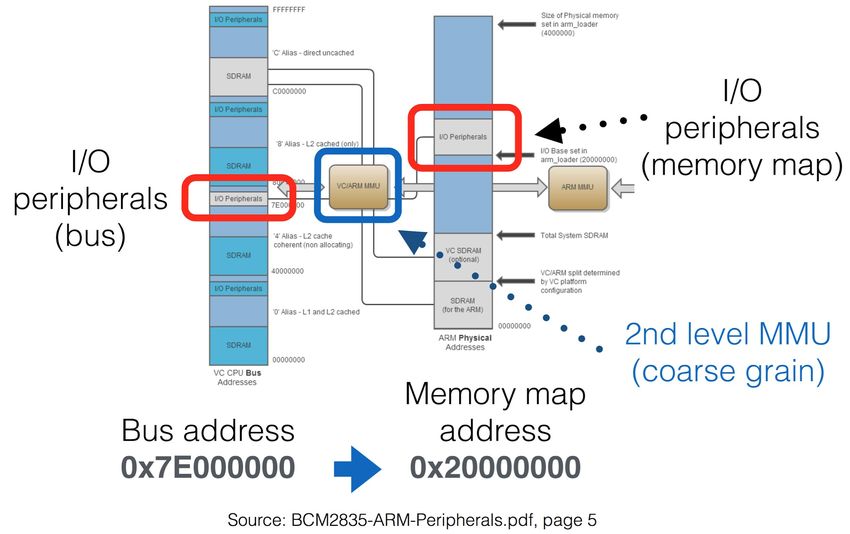
Périphériques passifs basiques
résistances
● bouton poussoir
● potentiomètre
● thermistance, photorésistance
● LED
● interrupteur commandé (relais)
● moteur(s)
15
Résistance et capacité
V
Résistance R1 R1
R2
R1*R2
loi d'Ohm R1+R2 R1 R2
R1+R2 R1+R2
U=RI R2 R2
Capacité charge d'une capacité
U
Q = CU
I = C dU/dt
U
composition
- parallèle C = Σ Ci
- série C = Σ 1 / Ci
16
Entrées-Sorties basiques
VR
VL
● Allumer une LED
○ Il faut que D13 soit programmé en sortie (5V)
○ loi d'Ohm : U = RI (ou R = U/I)
○ La tension aux bornes d'une LED allumée est ~ 1.8V
mA led
point de fonctionnement si VL = 1.8V ⇒ I = 20mA
20 ⇒ VR = 5-1.8 = 3.2V
I = (5-VL) / R R 160 Ohms ⇒ R = 3.2/20 = 160
I = led(VL) VL
5
● lire un bouton poussoir
○ Lorsque l'interrupteur est ouvert D2 est à 5V
○ Lorsqu'il se ferme la capacité se décharge
à 66% en RC secondes (résitance*capacité=temps)
○ en R1*C1 = 104 * 10-7 = 10-3 = 1 ms (66%)
C1
100nF
http://eskimon.fr/ est une aide précieuse 17
Traitement des rebonds
Il suffit d'échantillonner à une période supérieure aux rebonds, mais
inférieure à la durée d'appui
soit
● B : une variable
● E : la valeur du bouton poussoir
● appui : un drapeau à 1 si appui
● relache : un drapeau à 1 si relachement
faire périodiquement V
B = (B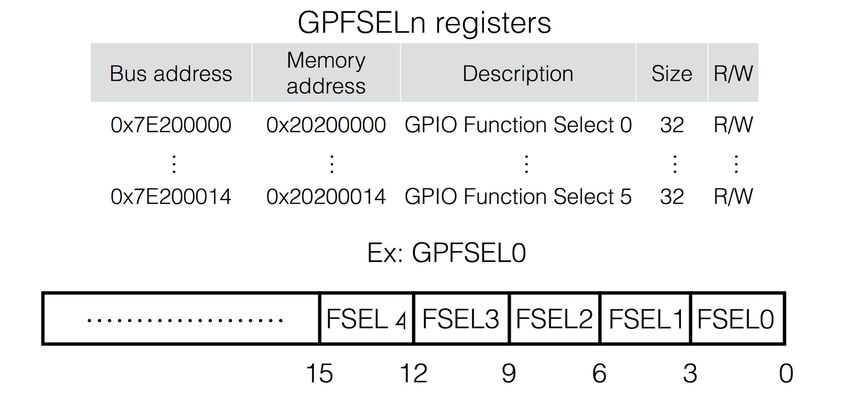
Conversion Analogique
19
Place de l'analogique
ANALOG
ADC
MULTIPLEX
PWM MEM
NUMERIC
CPU
IN
NUMERIC
OUT
20Convertisseur Analogique Numérique 1/2
Signal analogique 1 fil CAN Signal numérique N bits
La conversion impose une
quantification qui va dépendre
du nombre de bits du signal
numérique 8, 10, ou 12 bits
Recherche par dichotomie
out = 1 si Vin > Vr
0 si VinConversion Numérique Analogique PWM
Sans Convertisseur Numérique Analogique,
on peut produire un signal modulé
en largeur d'impulsion : PWM
La valeur moyenne du signal
est proportionnel à la largeur
d'impulsion
C'est ce propose l'Arduino.
http://www.mon-club-elec.fr/pmwiki_reference_arduino/
pmwiki.php?n=Main.AnalogWrite 23
Présentation RaspberryPi
24Raspberry Pi 1B
26 pins
BMC2835
25
GPIO de la Raspberry Pi
Le BCM2835 à 54 GPIO mais seulement 17 sont accessibles
La carte Raspberry Pi3 en propose 26 26GPIO schéma électrique
27
Périphériques de base : GPIO
150
28GPIO Memory Mapping
29
Mapping des GPIO dans l'espace utilisateur
adresses physiques
Espace d'adresses physiques des GPIO
Traduction d'adresses par la MMU
Espace d'adresses virtuelles
adresses virtuelles des
GPIO pour l'application
Le mapping est réalisé par un appel au système
30GPIO Registres de configuration
41 registres permettent de
définir les fonctions et les
comportement des GPIO
31
90
Configuration des broches GPIO
FSELn (3 bits) : 000 pour input 001 pour output
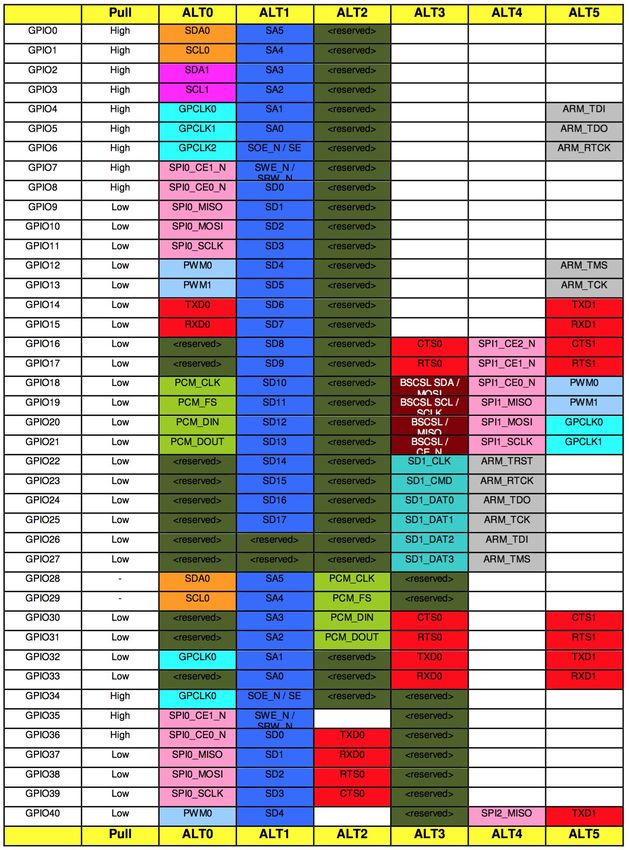
32GPIO functions
Chaque broche peut être liée
à des fonctions alternatives
● attention toutes ne sont pas
accessibles sur la RaspberryPi
● code couleur facilite la lecture
○ Orange / Fuschia I2C
○ Bleu moyen PWM
○ Rouge RS232
○ Marron SPI
○ ...
33
Ecrire une valeur sur une broche
Deux bits par broche : SET & CLEAR
4 registres 32 bits puisqu'il y a 54 GPIOs
adresse BUS
34Lire la valeur d'une broche
1 seul bit par broche qui recopie sa valeur
35
Exemple avec les GPIO 1/4
● L'objectif est d'accéder aux GPIO en utilisant le mapping des
registres de contrôle dans l'espace virtuel de l'application.
● On doit pouvoir
○ permettre l'accès aux registres par mmap
○ lire et écrire dans les registres
36Exemple avec les GPIO 2/4
● accès aux registres
void * gpio_base; if ( gpio_base == MAP_FAILED ) {
close ( mmap_fd );
mmap_fd = open( "/dev/mem", return -1;
O_RDWR | O_SYNC ); }
if ( mmap_fd < 0 ) {
return -1;
}
gpio_base = mmap (
NULL,
RPI_BLOCK_SIZE,
PROT_READ | PROT_WRITE,
MAP_SHARED, // pas de copy-on-write
mmap_fd,
BCM2835_GPIO_BASE );
37
Exemple avec les GPIO 3/4
● Ecriture dans les registres de configurations des GPIO
*( gpio_base + 0x0 ) =
( *( gpio_base + 0x0 ) & ~( 0x7Exemple avec les GPIO 4/4
● Pour lire l'état d'une broche
uint32_t reg_value =
( *( gpio_base + ( 0x34 / 4 ) ) >> 2 ) & 0x1;
adresse du registre à partir de la base
39
En TME
● Compilation et cross-compilation sur Raspberry Pi 1B
○ Hello World
○ Commande de LED et lecture d'un Bouton Poussoir
depuis une application utilisateur
○ Commande d'un afficheur LCD en mode utilisateur
40Vous pouvez aussi lire