Caractéristiques du produit - IRB 1100/CRB 1100
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

ROBOTICS Caractéristiques du produit IRB 1100/CRB 1100

Trace back information: Workspace 21B version a5 Checked in 2021-05-27 Skribenta version 5.4.005
Caractéristiques du produit
IRB 1100-4/0.475
IRB 1100-4/0.58
CRB 1100-4/0.475
CRB 1100-4/0.58
OmniCore
ID du document: 3HAC064993-004
Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.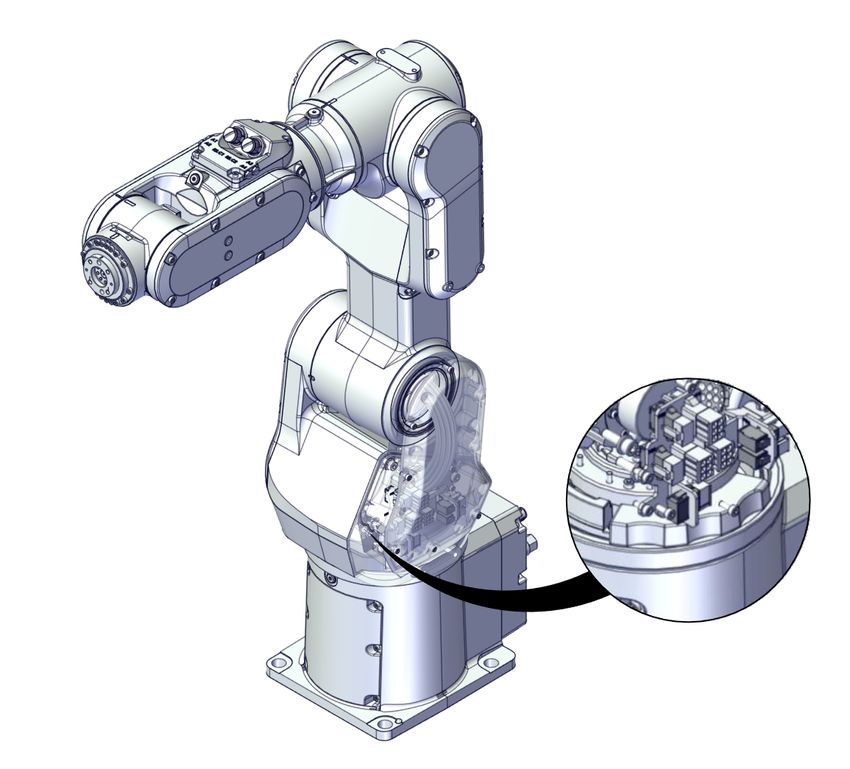
Les informations contenues dans ce manuel peuvent être modifiées sans préavis et
ne doivent pas être interprétées comme un engagement de la part d'ABB. La
responsabilité d'ABB ne sera pas engagée par suite d'erreurs contenues dans ce
manuel.
Sauf stipulation expresse du présent manuel, aucune des informations ne pourra
être interprétée comme une garantie d'ABB couvrant les risques de perte, de
dommages corporels ou matériels, l'adaptation à un usage particulier ou toute autre
garantie que ce soit.
En aucun cas, la responsabilité d'ABB ne pourra être engagée à la suite de dommages
fortuits ou liés à l'utilisation du présent manuel ou des produits décrits dans le manuel.
Le présent manuel ne doit pas être reproduit ou copié, intégralement ou en partie,
sans l'autorisation écrite d'ABB.
À conserver pour référence ultérieure.
D'autres exemplaires de ce manuel peuvent être obtenus auprès d'ABB.
Traduction de la notice originale.
© Copyright 2019-2021- ABB. Tous droits réservés.
Spécifications sujettes à changement sans préavis.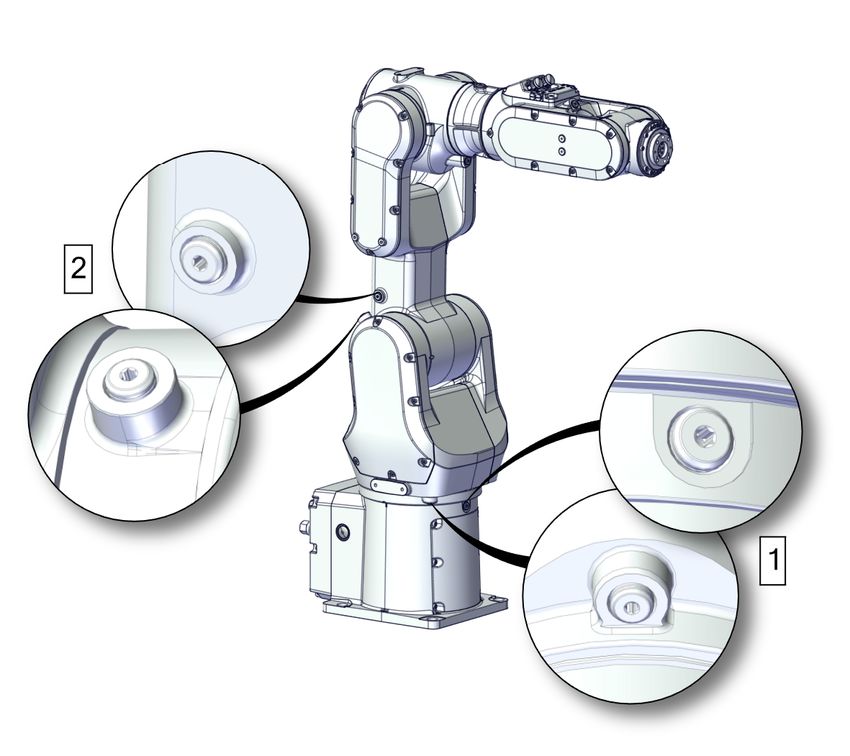
Table des matieres
Table des matieres
Vue d'ensemble de cette caractéristique ......................................................................................... 7
1 Description 9
1.1 Structure ......................................................................................................... 9
1.1.1 Introduction ............................................................................................ 9
1.1.2 Les différents versions de robot ................................................................. 13
1.1.3 Définition des désignations de versions ....................................................... 14
1.1.3.1 Caractéristiques techniques .......................................................... 14
1.2 Normes standard .............................................................................................. 23
1.2.1 Normes applicables ................................................................................. 23
1.3 Installation ....................................................................................................... 25
1.3.1 Présentation de l'installation ...................................................................... 25
1.3.2 Montage du manipulateur ......................................................................... 26
1.3.3 Installation du dispositif de guidage ............................................................ 27
1.3.4 Installation du scanner laser ...................................................................... 29
1.3.5 Lampe témoin ......................................................................................... 31
1.4 Étalonnage et références .................................................................................... 33
1.4.1 Méthodes d'étalonnage ............................................................................ 33
1.4.2 Repères de synchronisation et position de synchronisation des axes ................ 35
1.4.3 Étalonnage précis ................................................................................... 36
1.4.4 Absolute Accuracy étalonnage .................................................................. 38
1.5 Diagrammes des charges ................................................................................... 41
1.5.1 Introduction ............................................................................................ 41
1.5.2 Schémas ............................................................................................... 42
1.5.3 Charge maximale et moment d'inertie pour mouvement d'axe 5 complet et limité
à la verticale ........................................................................................... 46
1.5.4 Couple de poignet ................................................................................... 48
1.5.5 Accélération TCP maximale ...................................................................... 49
1.6 Montage de l'équipement sur le robot ................................................................... 50
1.7 Maintenance et dépannage ................................................................................. 53
1.8 Mouvements du robot ........................................................................................ 54
1.8.1 Rayon d’action ....................................................................................... 54
1.8.2 Axes avec plage de travail limitée ............................................................... 59
1.8.2.1 Axes avec plage de travail limitée ................................................... 59
1.8.2.2 Limitation mécanique du rayon d'action ........................................... 60
1.8.3 Performances conformes à la norme ISO 9283 ............................................. 61
1.8.4 Vitesse .................................................................................................. 62
1.8.5 Distances et temps d'arrêt du robot ............................................................ 63
1.9 Connexions client .............................................................................................. 64
2 Spécifications des variantes et options 67
2.1 Présentation des variantes et options ................................................................... 67
2.2 Manipulateur .................................................................................................... 68
2.3 Câbles au sol ................................................................................................... 72
3 Accessoires 73
3.1 Présentation des accessoires .............................................................................. 73
Index 75
Caractéristiques du produit - IRB 1100/CRB 1100 5
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.
Cette page a été volontairement laissée vierge
Vue d'ensemble de cette caractéristique
Vue d'ensemble de cette caractéristique
À propos de ces caractéristiques du produit
Ces caractéristiques de produit décrivent les performances du manipulateur ou
d'une famille complète de manipulateurs en termes :
• d'impressions structurelles et dimensionnelles ;
• de respect des normes, de la sécurité et de l'équipement de fonctionnement ;
• de diagrammes des charges, de montage d'équipement supplémentaire, de
mouvement et de position atteinte ;
• de caractéristiques de variante et d'options disponibles.
La spécification couvre la pince avec le système de commande OmniCore.
Utilisation
Les caractéristiques du produit permettent d'obtenir des informations sur les
performances d'un produit, par exemple pour décider quel produit acheter. Pour
savoir comment utiliser un produit, il faut consulter le manuel du produit.
Les caractéristiques sont destinées au :
• Chefs et personnel produit ;
• Personnel ventes et marketing
• Personnel commandes et service clientèle
Utilisation
Les caractéristiques du produit permettent d'obtenir des informations sur les
performances d'un produit, par exemple pour décider quel produit acheter. Pour
savoir comment utiliser un produit, il faut consulter le manuel du produit.
Les caractéristiques sont destinées au :
• Chefs et personnel produit ;
• Personnel ventes et marketing
• Personnel commandes et service clientèle
Références
Les documents auxquels ce manuel fait référence sont répertoriés dans le tableau
ci-dessous.
Nom du document ID du document
Caractéristiques du produit - OmniCore série C 3HAC065034-004
Manuel du produit - OmniCore C30 3HAC060860-004
Manuel d’utilisation - OmniCore 3HAC065036-004
Application manual - Controller software OmniCore 3HAC066554--001
Manuel du produit - IRB 1100 3HAC064992-004
Manuel du produit - CRB 1100 3HAC078007-004
Manuel du produit, pièces détachées - IRB 1100 3HAC064994-004
Manuel du produit, pièces détachées - CRB 1100 3HAC078009-004
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 7
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.
Vue d'ensemble de cette caractéristique
Suite
Nom du document ID du document
Circuit diagram - IRB 1100 3HAC066314-009
Circuit diagram - CRB 1100 3HAC076518-003
Révisions
Révision Description
A Première édition.
B Publié dans la version 19D. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Modifications mineures.
• Modification de la description de 3308-1 et 3350-400.
C Publié dans la version 20B. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Modification des caractéristiques de produit de l’étalonnage Ab-
solute Accuracy.
• Ajout du système de commande OmniCore C90XT pris en charge.
D Publié dans la version 20C. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Ajout de la classe de protection IP67 (option 3350-670) et du type
de protection Clean Room (option 3351-4).
• 209-2 Ajout du blanc standard ABB.
E Publié dans la version 20D. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Suppression du voyant de sécurité 3308-1.
• Ajout de la charge du bras max.
• Mise à jour de la section sur la garantie.
F Publié dans la version 21A. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Ajout de CRB 1100.
• Modifications mineures.
• Ajout de l’accélération maximum TCP.
• Mise à jour des performances conformément à la norme ISO 9283.
• Mise à jour de la valeur de diamètre des tuyaux d'air à l’intérieur
du robot.
G Publié dans la version 21B. Les mises à jour suivantes sont effectuées
dans la présente révision :
• Mise à jour du texte relatif à la qualité de la fixation.
• Mise à jour de la description de la protection IP67.
• Ajout d'une note afin de rappeler aux utilisateurs que les empla-
cements des butées mécaniques ne peuvent pas être ajustés.
Voir Axes avec plage de travail limitée à la page 59.
• Suppression de la résolution d'axe.
• Ajout d'une note dans le chapitre consacré à la protection du
manipulateur.
8 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.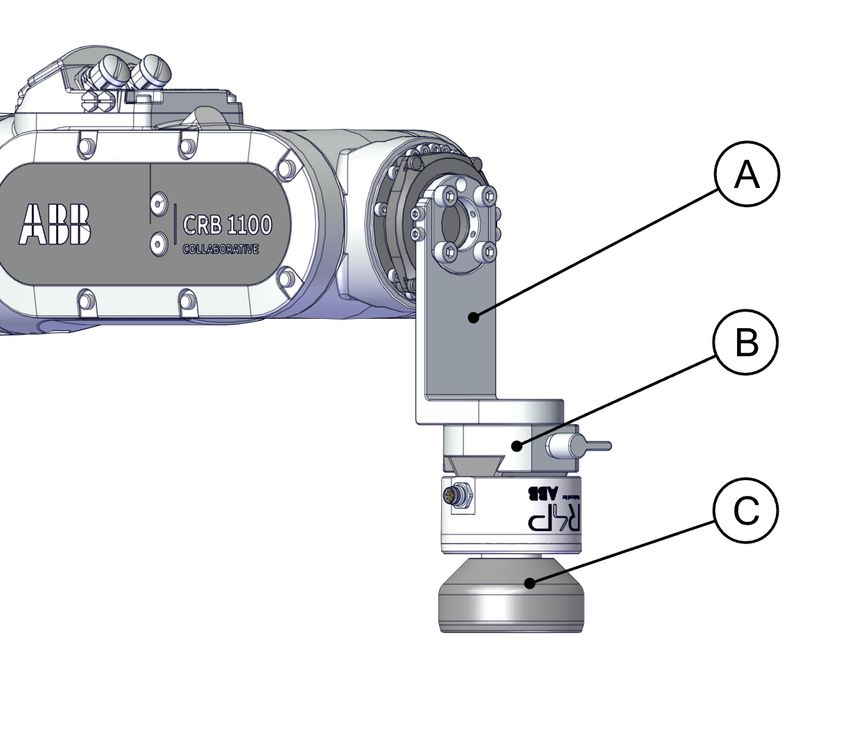
1 Description
1.1.1 Introduction
1 Description
1.1 Structure
1.1.1 Introduction
Introduction générale IRB 1100
Le modèle IRB 1100 représente l'une des toutes dernières générations de robots
industriels ABB Robotics à 6 axes d'une charge utile de 4 kg. Il est spécifiquement
et conçu pour les industries manufacturières nécessitant une souplesse élevée
en matière d'automatisation, notamment dans l'informatique, la communication et
l'électronique grand public. Il dispose d'une structure ouverte spécialement adaptée
à une utilisation souple. Il peut communiquer parfaitement avec les systèmes
externes.
Introduction générale CRB 1100
SWIFTI™ CRB 1100 est un robot collaboratif basé sur la plateforme de robots
industriels IRB 1100. Il comble l'écart entre les robots collaboratifs et les robots
industriels, permettant un fonctionnement collaboratif sûr dans des applications
exigeant des capacités de levage et de vitesse au niveau industriel. En associant
la technologie de séparation de sécurité et de vitesse SafeMove d'ABB avec un
scanner laser de sécurité, SWIFTI™ CRB 1100 garantit que les travailleurs ne se
trouvent jamais à l’intérieur de son champ d’intervention pendant ses mouvements.
En offrant à la fois la programmation de guidage via le dispositif de guidage à
clipser et le logiciel de programmation facile Wizard, SWIFTI™ CRB 1100 peut être
configuré sans formation spécialisée.
Classification Clean Room
Remarque
La classe Salle blanche n’est pas disponible pour les versions CRB 1100.
xx2000001201
Les émissions de particules du robot (IRB 1100) respectent les normes de classe
4 Clean room selon DIN EN ISO 14644-1, -14.
Selon le résultat du test IPA, le robot IRB 1100 est adapté pour un usage dans un
environnement type salles blanches.
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 9
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction
Suite
Classification de la contamination moléculaire aérienne, voir ci-dessous :
Paramètres d’environnement de test
Air en salle bla- Vitesse du débit Modèle du débit Température Humidité relative
nche Classe de d’air d'air
propreté
(Selon ISO
14644-1)
ISO 1 0,45 m/s hotte verticale à 22°C ± 0,5°C 45% ± 0,5%
flux laminaire
Paramètres de procédure de test
Capacité Charge utile fixée Fonctionnement de chaque
axe
50% et 100% 4 kg séparément
Résultat du test / Classification :
Lorsqu'il est utilisé dans les conditions d'essai indiquées, le IRB 1100 y compris
le préhenseur et la ventouse sont appropriés pour être utilisés dans des salles
blanches respectant les spécifications de l’air en classe de propreté suivant
conformément à ISO 14644-1.
Paramètre (s) de test Air en classe de propreté
Capacité = 50% 2
Capacité = 100% 4
Résultat final 4
Protection IP67
Remarque
IP67 n’est pas disponible pour les versions CRB 1100.
Le robot IRB 1100 est doté d'une protection IP67 en option. L'option ajoute des
joints et des pièces d'usinage.
Et les IRB 1100 respectent les normes de classe 5 Clean room selon DIN EN ISO
14644-1, -14.
Gamme de logiciels
Nous avons ajouté toute une gamme de logiciels (tous regroupés sous la
désignation Sécurité active) destinés à protéger d'une part le personnel du risque,
même faible, d'accident et d'autre part les outils du robot, les équipements
périphériques ainsi que le robot lui-même.
Système d'exploitation
Le robot est équipé du système de commande OmniCore C30 et du logiciel de
commande du robot, RobotWare. RobotWare prend en charge tous les aspects
du système de robot, notamment le contrôle des mouvements, le développement
et l'exécution des programmes applicatifs, la communication, etc. Voir Manuel
d’utilisation - OmniCore.
Suite page suivante
10 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction
Suite
Sécurité
Les normes de sécurité concernent le robot, le manipulateur et le système de
commande complets.
Sécurité collaborative
Remarque
Ce chapitre est uniquement disponible pour CRB 1100.
En associant la fonctionnalité de sécurité complète SafeMove d’ABB avec un
scanner laser de sécurité, SWIFTI™ peut être installé sans clôture physique et
collaborer en toute sécurité avec des personnes. Si un travailler est détecté dans
son champ d’intervention, SWIFTI™ ralentit ou s’arrête automatiquement pour lui
permettre d'approcher en toute sécurité. Une interaction lumineuse fournit une
indication visuelle de l'état de SWIFTI™. Elle signale les collègues humains lorsque
des personnes se trouvent à l’intérieur du champ d’intervention de SWIFTI™.
Notez qu’une API de sécurité est nécessaire pour la connexion avec le scanner
laser.
Fonctionnalités complémentaires
En ce qui concerne les fonctionnalités supplémentaires, le robot peut être équipé
d'un logiciel optionnel d'applications (comme les fonctions de communication), de
communication réseau et de fonctions avancées (fonctionnement multitâche,
contrôle par capteur, etc.). Pour obtenir la description complète des logiciels
optionnels, reportez-vous à Caractéristiques du produit - OmniCore série C.
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 11
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.1 Introduction
Suite
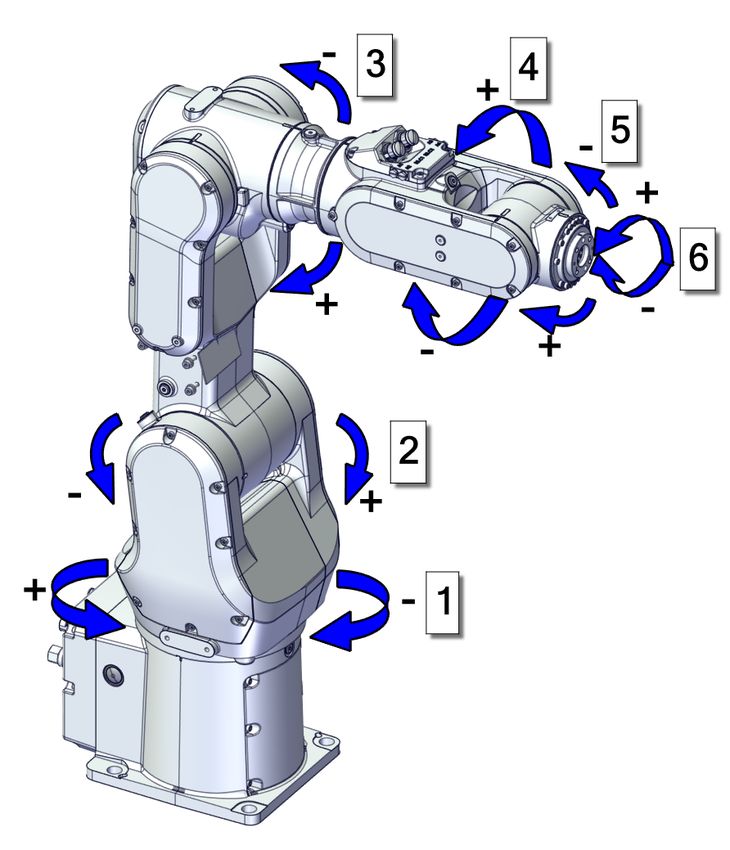
Axes du robot
xx1800002456
Rep Description Rep Description
1 Axe 1 2 Axe 2
3 Axe 3 4 Axe 4
5 Axe 5 6 Axe 6
12 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.2 Les différents versions de robot
1.1.2 Les différents versions de robot
Généralités
Le modèle IRB 1100/CRB 1100 est disponible en quatre versions.
Types de robot
Les différentes versions de robot suivantes sont disponibles.
Type de robot Capacité de manutention (kg) Portée (m)
IRB 1100-4/0.475 4 kg 0,475 m
IRB 1100-4/0.58 4 kg 0,58 m
CRB 1100-4/0.475 4 kg 0,475 m
CRB 1100-4/0.58 4 kg 0,58 m
Caractéristiques du produit - IRB 1100/CRB 1100 13
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
1.1.3 Définition des désignations de versions
1.1.3.1 Caractéristiques techniques
Poids, robot
Le tableau indique le poids du robot.
Modèle de robot Masse
IRB 1100/CRB 1100 21,1 kg
Remarque
Le poids n’inclut pas les outils et autres équipements installés sur le robot !
Charges sur la fondation, robot
La figure ci-dessous indique les directions des forces de contrainte des robots.
Les directions sont valables pour tous les robots au sol, sur table, au plafond et
suspendus.
Txy
Fz
Fxy
Tz
xx1100000521
Fxy Force dans un sens du plan XY
Fz Force dans un plan Z
Txy Couple de torsion dans un sens du plan XY
Tz Couple de torsion dans un plan Z
Suite page suivante
14 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Le tableau ci-dessous indique les forces et couples exercés sur le robot au cours
de divers types de fonctionnement.
Remarque
Ces valeurs de forces et de couples sont extrêmes et rarement atteintes en cours
de fonctionnement. Les valeurs n’atteignent également jamais leur maximum en
même temps.
AVERTISSEMENT
L'installation du robot est limitée aux options de montage indiquées dans les
tableaux de charges suivants.
Monté sur le sol
Force Charge d'endurance (en fonctionne- Charge maximale (arrêt d'urgence)
ment)
Force xy ±420 N ±710N
Force z +210 ±380 N +210 ±510 N
Couple xy ±180 Nm ±330 Nm
Couple z ±90 Nm ±140 Nm
Monté sur un mur
Force Charge d'endurance (en fonctionne- Charge max. (arrêt d'urgence)
ment)
Force xy +210 ±370 N +210 ±660 N
Force z ±370 N ±540 Nm
Couple xy ±200 Nm ±370Nm
Couple z ±90 Nm ±140 Nm
Suspendu
Force Charge d'endurance (en fonctionne- Charge max. (arrêt d'urgence)
ment)
Force xy ±420 N ±710 N
Force z -210 ±380 N -210 ±510 N
Couple xy ±180 Nm ±330 Nm
Couple z ±90 Nm ±140 Nm
Montage sur table
Force Charge d'endurance (en fonctionne- Charge maximale (arrêt d'urgence)
ment)
Force xy ±420 N ±710N
Force z +210 ±380 N +210 ±510 N
Couple xy ±180 Nm ±330 Nm
Couple z ±90 Nm ±140 Nm
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 15
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Exigences, fondation
Le tableau ci-dessous indique les exigences auxquelles doit répondre la fondation
supportant le poids du robot installé :
Exigences Valeur Remarque
Platitude de la surface 0.1/500 mm Les fondations planes offrent une meilleure ré-
de fondation pétabilité de l'étalonnage du résolveur par rap-
port aux paramètres originaux lors de la livraison
d'ABB.
La valeur du nivellement est définie selon les
points d'ancrage de la base du robot.
Pour compenser une surface irrégulière, le robot
peut être étalonné à l'installation. Si l'étalonnage
du résolveur/encodeur est modifié, cela aura un
impact sur la absolute accuracy.
Inclinaison maximum 5°
Fréquence de résona- 22 Hz La valeur est recommandée pour une performa-
nce minimum nce optimale.
Re- En raison de la rigidité de la fondation, prenez
marque en compte l’équipement dans la masse du ro-
Le fait d’avoir bot. i
une fréquence de Pour des informations liées à la compensation
résonance plus des flexibilités de fondation, voir Application
faible que celle manual - Controller software OmniCore, rubrique
recommandée Mode de processus des mouvements.
peut affecter la
durée de vie du
manipulateur.
i La fréquence de résonance minimale donnée doit être interprétée comme la fréquence de la
masse/inertie du robot, le robot supposé rigide, lorsqu’une élasticité translationnelle/torsionnelle
de la fondation est ajoutée, p. ex. la rigidité du piédestal sur lequel le robot est monté. La fréquence
de résonance minimale ne doit pas être interprétée comme la fréquence de résonance du bâtiment,
du sol, etc. Par exemple, si la masse équivalente du sol est très élevée, cela n’affectera pas le
mouvement du robot, même si la fréquence est bien inférieure à la fréquence déclarée. Le robot
doit être monté aussi rigide que possible sur le sol.
Les perturbations des autres machineries affecteront le robot et la précision de l’outil. Le robot
possède des fréquences de résonance dans la zone de 10-20 Hz et les perturbations dans cette
plage seront amplifiées, bien qu’amorties quelque peu par le servo-contrôle. Cela pourrait être un
problème, en fonction des exigences des applications. Si c’est un problème, le robot doit être isolé
de l’environnement.
Conditions d'entreposage, robot
Le tableau ci-dessous indique les conditions d'entreposage préconisées pour le
robot :
Paramètre Valeur
Température ambiante minimale -25°C (-13°F)
Température ambiante maximale +55°C (+131°F)
Température ambiante maximale (moins de 24 h) +70°C (+158°F)
Humidité ambiante maximale 95% à une température constante
(gazeux uniquement)
Suite page suivante
16 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Conditions de fonctionnement, robot
Le tableau ci-dessous indique les conditions de fonctionnement préconisées pour
le robot :
Paramètre Valeur
Température ambiante minimale +5°C i (41°F)
Température ambiante maximale +45°C (113°F)
Humidité ambiante maximale 95 % max. à température consta-
nte
i À faible température ambiante (moins de 10° C, il est recommandé d'effectuer un cycle de
préchauffage sur le robot. Sinon, le robot risque de s'arrêter ou de fonctionner à faible performance
en raison d'huile et de graisse dont la viscosité dépend de la température.
Classes de protection, robot
Le tableau présente les types de protection disponibles du robot, avec la classe
de protection correspondante.
Les variantes CRB 1100 sont uniquement disponibles pour IP40.
Type de protection Classe de protection
Manipulateur, type de protection Standard IP40
IP67 (option 3350-670)
Manipulateur, type de protection Clean Room ISO 4
Autres informations techniques
Données Description Remarque
Niveau de bruit aérien Niveau de pression acoustique < 65 dB(A) Leq (conformément
en dehors de l'espace de tra- à la directive machine
vail. 2006/42/EC)
Consommation d'énergie pour une charge maximale
Type de mouvement IRB 1100-4/0.475 IRB 1100-4/0.58
CRB 1100-4/0.475 CRB 1100-4/0.58
Cube ISO 282 275
Vitesse max. (W)
Robot en position d'étalonnage. IRB 1100-4/0.475 IRB 1100-4/0.58
CRB 1100-4/0.475 CRB 1100-4/0.58
Freins engagés (W) 70 79
Freins desserrés (W) 154 160
Caractéristiques du produit - IRB 1100/CRB 1100 17
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
E1 E2
E4 E3
A
xx1000000101
Rep Description
A 250 mm
18 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Dimensions principales de IRB 1100-4/0.475
314
A 250 64
10
225
609
562
327
173
135 17
182
101
158
135
C B
xx1800002606
Rep Description
A Rayon de rotation : R85
B Rayon de rotation : R109
C Rayon de rotation : R61
Caractéristiques du produit - IRB 1100/CRB 1100 19
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Dimensions principales de IRB 1100-4/0.58
364
A 300 64
10
280
664
617
327
135
17
182
101
158
135
B
C
xx1800002607
Rep Description
A Rayon de rotation : R85
B Rayon de rotation : R109
C Rayon de rotation : R61
20 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Dimensions principales de CRB 1100-4/0.475
314
A
250 64
10
225
609
562
327
173
135 17
182
101
158
135
B
C
xx2000002545
Rep Description
A Rayon de rotation : R85
B Rayon de rotation : R109
C Rayon de rotation : R61
Caractéristiques du produit - IRB 1100/CRB 1100 21
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.1.3.1 Caractéristiques techniques
Suite
Dimensions principales de CRB 1100-4/0.58
364
A 300 64
10
280
664
617
327
17
135
101
182
158
135
B C
xx2000002546
Rep Description
A Rayon de rotation : R85
B Rayon de rotation : R109
C Rayon de rotation : R61
22 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
1.2 Normes standard
1.2.1 Normes applicables
Remarque
Les normes indiquées sont valides au moment de la publication de ce document.
Les normes abandonnées ou remplacées sont retirées de la liste lorsque cela
est nécessaire.
Généralités
Le produit est conçu conformément à la norme ISO 10218-1:2011, Robots for
industrial environments - Safety requirements -Part 1 Robots, et aux parties
applicables des références normatives, telles que visées dans ISO 10218-1:2011.
En cas d'écarts par rapport à la norme ISO 10218-1:2011, ceux-ci sont répertoriés
dans la déclaration d'incorporation qui fait partie de la livraison du produit.
Règles normatives telles que visées dans la norme ISO 10218-1
Norme Description
ISO 9283:1998 Manipulating industrial robots - Performance criteria and related
test methods
ISO 10218-2 Robots and robotic devices - Safety requirements for industrial
robots - Part 2: Robot systems and integration
ISO 12100 Safety of machinery - General principles for design - Risk as-
sessment and risk reduction
ISO 13849-1:2006 Safety of machinery - Safety related parts of control systems
- Part 1: General principles for design
ISO 13850 Safety of machinery - Emergency stop - Principles for design
IEC 60204-1:2005 Safety of machinery - Electrical equipment of machines - Part
1: General requirements
IEC 62061:2005 Safety of machinery - Functional safety of safety-related elec-
trical, electronic and programmable electronic control systems
Normes et spécifications spécifiques à la région
Norme Description
ANSI/RIA R15.06 Safety requirements for industrial robots and robot systems
ANSI/UL 1740 Safety standard for robots and robotic equipment
CAN/CSA Z 434-14 Industrial robots and robot Systems - General safety require-
ments
Autres normes utilisées pour la conception
Norme Description
ISO 9787:2013 Robots and robotic devices -- Coordinate systems and motion
nomenclatures
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 23
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.2.1 Normes applicables
Suite
Norme Description
IEC 61000-6-2 Electromagnetic compatibility (EMC) – Part 6-2: Generic stan-
dards – Immunity standard for industrial environments
IEC 61000-6-4 Electromagnetic compatibility (EMC) – Part 6-4: Generic stan-
(option 129-1) dards – Emission standard for industrial environments
ISO 13732-1:2008 Ergonomics of the thermal environment - Part 1
IEC 60974-1:2012 i Arc welding equipment - Part 1: Welding power sources
IEC 60974-10:2014 i Arc welding equipment - Part 10: EMC requirements
ISO 14644-1:2015 ii Classification of air cleanliness
IEC 60529:1989 + A2:2013 Degrees of protection provided by enclosures (IP code)
i Valable uniquement pour les robots de soudage à l'arc. Remplace IEC 61000-6-4 pour les robots
de soudage à l'arc.
ii Uniquement les robots avec protection Clean Room.
24 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.1 Présentation de l'installation
1.3 Installation
1.3.1 Présentation de l'installation
Généralités
L'IRB 1100/CRB 1100 est adapté à un environnement industriel normal. En fonction
de la version du robot, il est possible de monter un outil terminal d'un poids maximal
de 4 kg (charge utile comprise) sur la bride de montage du robot (axe 6). Voir
Diagrammes des charges à la page 41.
Charges supplémentaires
Le bras supérieur peut supporter un poids supplémentaire de 0,5 kg.
Voir Montage de l'équipement sur le robot à la page 50.
Limites de la plage de fonctionnement
Le rayon d'action de l'axe 1 peut être limité par des butées mécaniques en option.
Reportez-vous au chapitre Rayon d'action à la page 58.
Caractéristiques du produit - IRB 1100/CRB 1100 25
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.2 Montage du manipulateur
1.3.2 Montage du manipulateur
Vis de fixation
Le tableau ci-dessous indique le type de vis de fixation et de rondelle à utiliser
pour l'ancrage du robot dans la plaque d'assise/la fondation.
Vis appropriées M12x25 (installation directe au sol)
Quantité 4 pcs
Qualité 8.8
Rondelle appropriée 24 x 13 x 2.5, dureté de l'acier de classe
300HV
Goujons de guidage 2 pcs, D6x20, ISO 2338 - 6m6x20 - A1
Couple de serrage 50 Nm±5 Nm
Exigences en matière de surface plane
xx0900000643
Configuration des trous, base
Cette illustration représente la configuration des trous utilisée pour l'ancrage du
robot.
6
135
11
11.5
5.5
4
10
135
10
11
R16
A-A A A
11.5
+0.012
4x M12 10 6 H7 0
4
5.5
11
135
5.5
11
11.5 +0.012
4x R16
135 6 H7 0
xx1800002448
26 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.3 Installation du dispositif de guidage
1.3.3 Installation du dispositif de guidage
Remarque
Cette section est uniquement disponible pour CRB 1100.
Introduction
La fonctionnalité de guidage est disponible pour CRB 1100 équipé d'un dispositif
de guidage monté sur l’axe 6. Le dispositif de guidage vous permet de maintenir
le manipulateur et de déplacer le bras du robot manuellement dans la position
souhaitée, ce qui représente une alternative au pilotage manuel.
Pour utiliser le dispositif de guidage, assurez-vous que le système fonctionne en
mode manuel ; sinon, la fonctionnalité ne peut pas être activée.
Emplacement du dispositif de guidage
L'emplacement du dispositif de guidage est indiqué dans la figure.
xx2100000159
A Adaptateur
B Base du dispositif de guidage
C Dispositif de guidage
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 27
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.3 Installation du dispositif de guidage
Suite
Préparer l’adaptateur
Le dispositif de guidage est monté sur la base du dispositif puis sur la bride d'outil
du robot à l’aide d'un adaptateur. Un adaptateur en L est livré avec le robot comme
une option par défaut. Les clients peuvent également concevoir des adaptateurs
en fonction des exigences réelles. Lors de la conception de l'adaptateur, les
dimensions des trous sur la base du dispositif et la bride d'outil du robot doivent
être prises en compte.
La figure suivante illustre les dimensions des trous sur la base du dispositif de
guidage.
44
38,7
6,6 THRU ALL
4 x M4 - 6H THRU ALL 25,5 R16,75 18,9 10 7
3,3 THRU ALL A19,5 R4,25 12,8 11 X 90°, Near Side
13,4 3,2 10 R1 6,3
4 x M4 - 6H THRU ALL
3,3 THRU ALL
4x 7,3 6
8,7
4x 9 THRU ALL
9
17
9,6
18,2
19,5
19,5
9,1
65
2x 6,2 THRU ALL
24
2x 7.94 THRU ALL
3/8-16 UNC THRU ALL
R27
R3,2
R3,2
10,5 1 3,1 10,5
A SECTION A-A 19,5
xx2100000164
Pour connaître les dimensions des trous sur la bride d'outil du robot, voir Bride
d'outil, standard à la page 52.
28 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.4 Installation du scanner laser
1.3.4 Installation du scanner laser
Remarque
Cette section est uniquement disponible pour CRB 1100.
Vue d'ensemble
La technologie de séparation de la sécurité pour CRB 1100 se base sur la connexion
et la communication au sein d'un scanner laser de sécurité, une API de sécurité
qui peut agir comme un maître et un système de commande OmniCore doté de
SafeMove.
Le scanner laser est fourni avec CRB 1100 en option par défaut, mais les utilisateurs
peuvent préparer une API de sécurité par eux-mêmes. Le scanner laser pris en
charge est le modèle SICK® microScan 3 Core. Des détails sur le modèle de
scanner se trouvent sur la plaque signalétique du scanner. D'autres types ou
modèles de scanners peuvent ne pas offrir toutes les fonctionnalités.
Le scanner laser sert de contrôleur continu et précis des activités dans sa zone
de balayage et forme un champ de protection. Il doit se connecter à l’API, puis au
système de commande OmniCore via le réseau sécurisé PROFINET (PROFIsafe).
La figure suivante illustre les connexions physiques entre eux.
OmniCore controller PLC Laser Scanner
WAN XF1 XD1
white blue
black
brown
24V + 0V
PROFIsafe PROFIsafe
xx2100000160
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 29
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.4 Installation du scanner laser
Suite
Le scanner laser offre une plage de balayage d'environ 275°. L’intégrateur de
système doit examiner l'environnement du site et placer le scanner laser à un
emplacement approprié en fonction des exigences réelles.
275°
xx2100000168
Pour plus de détails sur le scanner laser de sécurité, consultez les Instructions
d’utilisation du fournisseur.
30 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
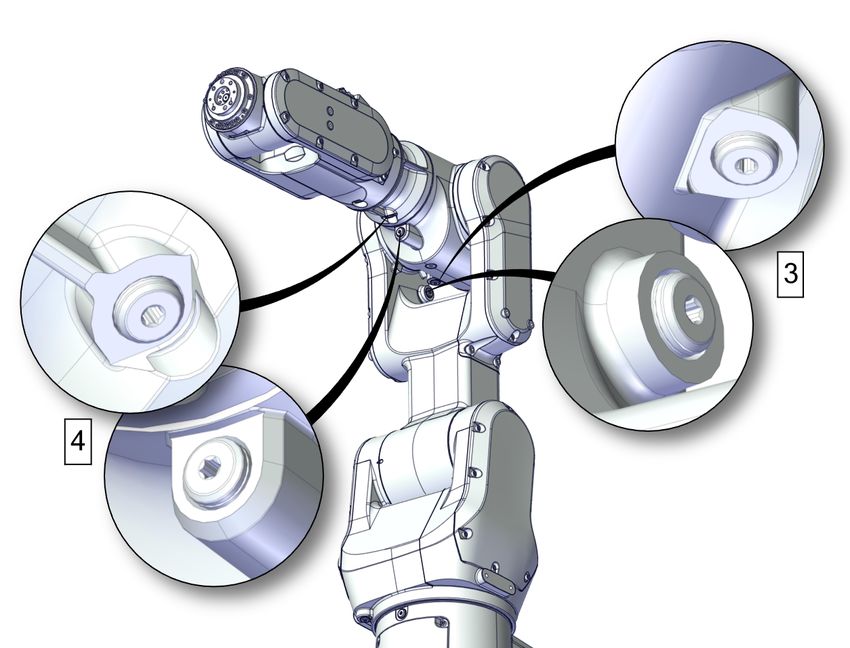
1.3.5 Lampe témoin
1.3.5 Lampe témoin
Remarque
Cette section est uniquement disponible pour CRB 1100.
Description
L’unité de lampe sur le moyeu de processus de CRB 1100 indique l'état du robot
en quatre couleurs. Les opérateurs doivent toujours connaître la couleur du voyant
et gérer la situation en conséquence.
Câblage
Le câblage de l’unité de lampe est intégré dans le câble CP/CS. N’utilisez pas
d'autres types de câbles CP/CS non fournis par ABB ; sinon l'unité de lampe ne
fonctionnera pas.
L’extrémité du câble reliant le manipulateur est branchée sur le connecteur R1.C1
sur la base du robot ; l’autre extrémité du câble est divisée en deux connecteurs,
qui sont branchés respectivement sur le connecteur E/S et le connecteur X19 du
système de commande.
La figure suivante illustre les connecteurs du robot et du système de commande.
Pour plus de détails sur les câbles, voir Circuit diagram - CRB 1100.
A B C
xx2100000291
A Connecteur R1.C1 sur la
base du robot
B Connecteur E/S sur le sys- Les broches GND, DO1, DO2 et DO3 servent pour
tème de contrôle l’unité de lampe
C Connecteur X19 sur le sys- Les broches 1 et 2 servent pour l’unité de lampe
tème de commande
Fonctionnalité
Couleur Mode manuel Mode automatique Mode manuel à pleine vi-
tesse
Blanc Veille (en état Moteurs On/Off et programme arrêté, disponible pour que les utili-
sateurs effectuent les actions suivantes)
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 31
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.3.5 Lampe témoin
Suite
Couleur Mode manuel Mode automatique Mode manuel à pleine vi-
tesse
Vert Le programme est en cours d'exécution
Jaune La fonction de guidage est La zone d'avertissement jaune est déclenchée (la vite-
activée sse du manipulateur sera limitée en fonction de la va-
leur configurée réelle)
Rouge Arrêt d'urgence ou erreur Arrêt d'urgence, erreur constatée ou zone de protec-
constatée tion rouge déclenchée (le manipulateur ralentit jusqu'à
la vitesse 0% et reste immobile)
32 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.1 Méthodes d'étalonnage
1.4 Étalonnage et références
1.4.1 Méthodes d'étalonnage
Vue d'ensemble
Cette section indique les différents types d'étalonnage et les méthodes d'étalonnage
proposées par ABB.
Les données d'étalonnage d'origine fournies avec le robot sont générées lorsque
le robot est monté au sol. Si le robot n'est pas monté au sol, la précision du robot
pourrait en être affectée. Le robot doit être étalonné après son montage.
Le manuel du produit contient des informations complémentaires.
Types d'étalonnage
Type d'étalonnage Description Méthode d'étalonnage
Étalonnage stan- Le robot étalonné est placé en position d'éta- Axis Calibration
dard lonnage.
Les données d'étalonnage standard se
trouvent sur la carte SMB (carte de mesure en
série) ou EIB dans le robot.
Absolute accuracy Basé sur l'étalonnage standard, l'étalonnage CalibWare
étalonnage (faculta- Absolute accuracy (précision absolue) place
tif) le robot en position de synchronisation, mais
compense également :
• les tolérances mécaniques de la struc-
ture du robot ;
• toute flexion due à la charge
L'étalonnage Absolute accuracy (précision
absolue) met l'accent sur la précision du posi-
tionnement dans le système de coordonnées
cartésien du robot.
Les données d'étalonnage Absolute accuracy
se trouvent sur la SMB (carte de mesure série)
du robot.
Dans le cas des robots étalonnés avec la fon-
ctionnalité Absolute accuracy, les informations
d'option sont imprimées sur la plaque signalé-
tique.
Pour que le robot retrouve des performances
Absolute accuracy (précision absolue) opti-
males, le robot doit être ré-étalonné afin de
garantir une précision absolue optimale après
toute intervention de maintenance ou répara-
tion concernant sa structure mécanique.
Brève description des méthodes d'étalonnage
Méthode Axis Calibration
Axis Calibration est une méthode d'étalonnage standard pour l'étalonnage de IRB
1100/CRB 1100 et c'est la plus précise. C'est la méthode recommandé pour obtenir
des performances correctes.
Les routines suivantes sont disponibles pour la méthode Axis Calibration :
• Étalonnage précis
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 33
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.1 Méthodes d'étalonnage
Suite
• Mise à jour des compte-tours
• Reference Calibration
L'équipement d'étalonnage de Axis Calibration est fourni sous la forme d'un jeu
d'outils.
Vous trouverez les instructions relatives à l'exécution de la procédure d'étalonnage
sur le FlexPendant. Il vous guidera, étape par étape, tout au long de la procédure
d'étalonnage.
CalibWare - Absolute Accuracy étalonnage
L’outil CalibWare vous guide tout au long du processus d'étalonnage et calcule
les nouveaux paramètres de compensation. Pour plus d'informations, voir
Application manual - CalibWare Field.
Si une opération de service est effectuée sur un robot avec l'option Absolute
Accuracy, un nouvel étalonnage de précision absolue est nécessaire afin d'obtenir
des performances optimales. Dans la plupart des cas, après un remplacement du
ne comprenant pas le démontage de la structure du robot, un étalonnage standard
est suffisant.
L'option Absolute Accuracy varie en fonction de la position de montage du robot.
Cette information est indiquée sur la plaque signalétique de chaque robot. Afin
d’assurer une précision absolue, le robot doit être placé dans sa bonne position
de montage lors de son réétalonnage.
34 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.2 Repères de synchronisation et position de synchronisation des axes
1.4.2 Repères de synchronisation et position de synchronisation des axes
Introduction
Cette section shows indique la position des repères de synchronisation et la position
de synchronisation de chaque axe.
Repères de synchronisation, IRB 1100
4 5 6
3
2
1
xx1800002455
ATTENTION
Pour étalonner l’axe 6, l’encoche du poignet doit être alignée avec le trou de
goupille marqué sur la bride d'outil. Avant d'installer un outil sur la bride d'outil,
vérifiez que l’outil présente un repère précis au niveau de la position
correspondante.
Caractéristiques du produit - IRB 1100/CRB 1100 35
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
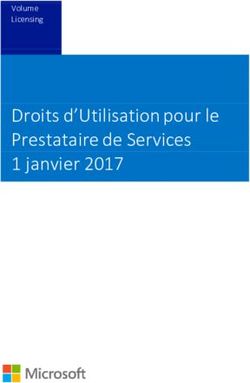
1.4.3 Étalonnage précis
1.4.3 Étalonnage précis
Généralités
L’étalonnage précis s’effectue à l’aide de la méthode d'étalonnage de l’axe (Axis
Calibration).
xx1800003320
xx1800003514
Suite page suivante
36 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.3 Étalonnage précis
Suite
xx1800003515
Axes
Rep Description Rep Description
1 Axe 1 2 Axe 2
3 Axe 3 4 Axe 4
5 Axe 5 6 Axe 6
Caractéristiques du produit - IRB 1100/CRB 1100 37
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.4 Absolute Accuracy étalonnage
1.4.4 Absolute Accuracy étalonnage
Objet
Le concept d'étalonnage Absolute Accuracy assure une précision absolue TCP.
La différence entre un robot idéal et un robot réel peut être de plusieurs millimètres
et s'explique par les tolérances mécaniques et la déflexion de la structure du robot
due à la charge. La valeur Absolute Accuracy permet de compenser ces différences.
Voici quelques exemples pour lesquels cette précision est primordiale :
• Les possibilités de changement de robot
• Programmation hors ligne avec un minimum de réglage ou aucun réglage
• Programmation en ligne avec des mouvements précis et une réorientation
précise de l'outil
• La programmation avec des mouvements de décalage précis en relation,
par exemple, avec le système de vision ou la programmation d'un décalage
• Réutilisation des programmes entre les applications
L'option Absolute Accuracy est intégrée aux algorithmes du système de commande
afin de compenser cette différence et ne nécessite ni équipements, ni calculs
externes.
Remarque
Les données de performance s’appliquent à la version de RobotWare installé
sur le robot individuel.
xx1800002701
Éléments inclu dans les
Chaque robot doté de l'option Absolute Accuracy est livré avec :
• paramètres de compensation enregistrés sur la carte de mesure série
• un certificat de naissance représentant le protocole de mesure de la Absolute
Accuracy pour la séquence d'étalonnage et de vérification.
Suite page suivante
38 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.4 Absolute Accuracy étalonnage
Suite
Les robot avec étalonnage Absolute Accuracy sont dotés d'une étiquette
mentionnant cette information sur le manipulateur.
L’option Absolue Accuracy (Précision absolue) prend en charge les installations
au sol, suspendues et au plafond. Les paramètres de compensation enregistrés
sur la carte de mesure série du robot varient en fonction de l’option Absolute
Accuracy (Précision absolue) sélectionnée.
Quand la fonctionnalité Absolute Accuracy est-elle utilisée
La fonctionnalité Absolute Accuracy fonctionne sur les robots configurés sur des
coordonnées cartésiennes, et non sur les articulations individuelles. Par
conséquent, les mouvements reposant sur les articulations (comme MoveAbsJ)
ne seront pas impactés.
En cas d'inversion du robot, l'étalonnage Absolute Accuracy doit être effectué au
moment de l’inversion du robot.
Absolute Accuracy actif
L'option Absolute Accuracy sera active dans les cas suivants :
• Toute fonction de déplacement basée sur les valeurs robtarget (comme
MoveL) et ModPos sur robtargets
• Pilotage en réorientation
• Pilotage manuel linéaire
• Définition d'outil (définition d'outil à 4, 5 et 6 points, TCP fixe, outil
stationnaire)
• Définition du repère objet
Option Absolute Accuracy non active
Voici plusieurs exemples durant lesquels l'option Absolute Accuracy n’est pas
active :
• Toute fonction de déplacement basée sur une valeur jointtarget (MoveAbsJ)
• Articulation indépendante
• Pilotage sur articulation
• Axes supplémentaires
• Unité de translation ("track motion")
Remarque
Dans un système de robot équipé par exemple d’un axe ou d'une unité de
translation en plus, l'option Absolute Accuracy est active pour la manipulateur
mais pas pour l’axe ou l’unité de translation en plus.
Instructions RAPID
Aucune instruction RAPID n'est incluse dans cette option.
Suite page suivante
Caractéristiques du produit - IRB 1100/CRB 1100 39
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.4.4 Absolute Accuracy étalonnage
Suite
Données de production
Les données de production standard concernant l'étalonnage sont les suivantes
:
Robot Précision du positionnement (mm)
Moyen Max % dans les 1 mm
IRB 1100-4/0.475 et 0,08 0,25 100
CRB 1100-4/0.475
IRB 1100-4/0.58 et CRB 0,10 0,25 100
1100-4/0.58
40 Caractéristiques du produit - IRB 1100/CRB 1100
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.1 Description
1.5.1 Introduction
1.5 Diagrammes des charges
1.5.1 Introduction
AVERTISSEMENT
Il est primordial de toujours définir les données de charge réelle correctes et de
corriger la charge utile du robot. Des définitions incorrectes des données de
charge peuvent entraîner une surcharge du robot.
Si on utilise des données de charge et/ou s'il s'agit de charges en dehors du
diagramme de charge, les pièces suivantes peuvent être endommagées par une
surcharge :
• moteurs
• réducteurs
• structure mécanique
AVERTISSEMENT
Dans RobotWare, la routine de service LoadIdentify peut être utilisée pour
déterminer les paramètres de charge corrects. La routine définit automatiquement
l’outil et la charge. Voir Manuel d’utilisation - OmniCore, pour des informations
détaillées.
AVERTISSEMENT
Les robots fonctionnant avec des données de charge incorrectes et/ou des
charges en dehors du diagramme de charge, ne seront pas couverts par la
garantie du robot.
Généralités
Les diagrammes des charges comprennent une inertie de charge utile nominale,
J0 de 0,012 kgm 2 , et une charge supplémentaire de 0,5 kg au niveau du boîtier du
bras supérieur.
Le diagramme de charge varie en fonction du moment d'inertie. Pour les robots
qui peuvent être montés inclinés, au mur ou inversés, les diagrammes de charge
tels qu'ils sont donnés sont valables et par conséquent, il est également possible
d'utiliser RobotLoad dans les limites d'inclinaison et d'axe.
Commande du cas de chargement avec RobotLoad
Pour vérifier un cas de charge spécifique, utilisez le module complémentaire
RobotLoad de RobotStudio.
Le résultat de RobotLoad est seulement valable dans les limites de charge et
d'angle d'inclinaison. Aucun avertissement n'est émis en cas de dépassement de
la charge maximale du bras. En cas de surcharge nécessaire ou d'application
spéciale, contactez ABB pour une analyse plus approfondie.
Caractéristiques du produit - IRB 1100/CRB 1100 41
3HAC064993-004 Révision: G
© Copyright 2019-2021- ABB. Tous droits réservés.Vous pouvez aussi lire