COMPTEUR GEIGER SUR UN ROVER
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
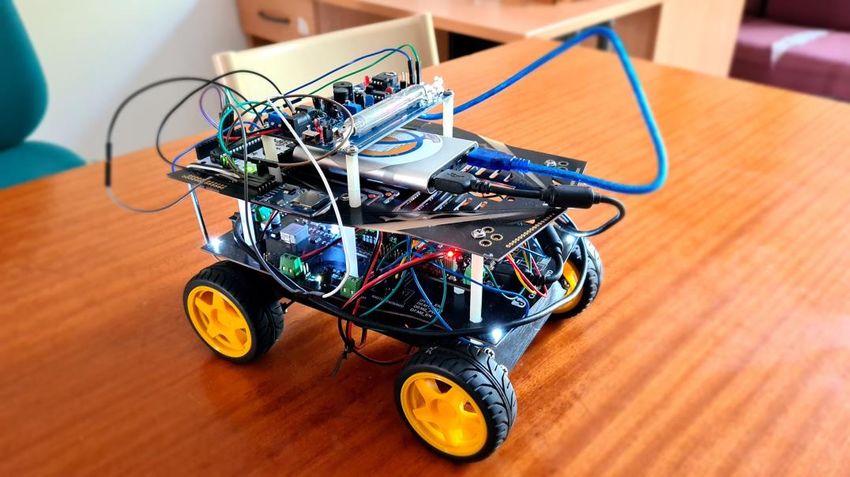
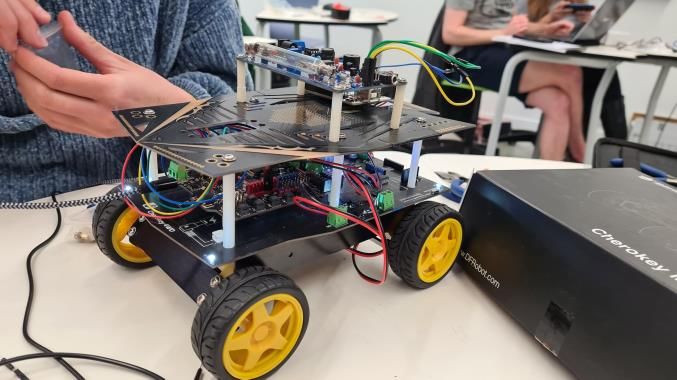
COMPTEUR GEIGER SUR UN ROVER Thomas LAISNEY, Daphné ROUSSEAU, Maxence PIAT Résumé Dans le cadre du module d’instrumentation et mesures physiques pour la troisième année de Licence de Sciences de la Terre, un rover avec un compteur geiger a été créé. Les différentes étapes seront listées et détaillées dans cet article pour au final répondre à la problématique qui a mené au développement de ce rover. La science, source constante d’évolution et de nouvelles technologies, n’est autre que le meilleur outil pour aider à améliorer la qualité de vie. Un rover Geiger permettant de déterminer à distance les émissions radioactives d’un endroit donné était l’objectif de ce projet. Entre l’idée naissante du projet et l’aboutissement complet de l’objet, cela à été un long chemin parsemé de défis à relever. Dans cet article les différentes étapes du développement complet du rover Geiger seront expliquées, avec le types de pièces et codes utilisés, les difficultés rencontrées, le tout illustré par des photographies. La formation réussie de ce rover a même permis d’effectuer des mesures de radioactivité dans l’enceinte de l’OSUC pour tester sa fiabilité et le projet est une réussite.
1 INTRODUCTION
La problématique nécessitant la fabrication de ce rover est la suivante :
Pouvoir mesurer le taux de radioactivité à distance. La fabrication d’un
rover équipé d’un compteur Geiger était la meilleure option.
2 MONTAGE
Les composants utilisés sont les suivants :
- un rover Cherokey 4WD
- une carte arduino uno modifié appelé Roméo BLE
2
- une carte arduino UNO qui va récupérer les données
- un compteur geiger Arduino
- un adaptateur à carte SD arduino
3
La carte Romeo va recevoir le code permettant de faire bouger les roues
du Rover et ne seront reliées qu’à celles-ci. Cette carte étant compatible
bluetooth, nous utiliserons l’application android Bluno Remote afin de
contrôler le Rover. Ensuite, les données sont mesurées à l’aide du
compteur geiger arduino, celui-ci est connecté à une carte arduino UNO
qui va récupérer le nombre de “coups” ou de désintégrations par minutes
et enfin envoyer ces données dans une carte micro sd par le biais d’un
adaptateur arduino. (photos annexe B)
3 LE PROGRAMME EN C POUR L’ARDUINO
Premièrement, le code (annexe B) pour contrôler le Rover a été récupéré
sur le site des fabricants de la carte (et du rover) et aucunes librairies
n’ont été importées. Les changements effectués sur celui-ci ont été au
niveau des touches pour les différentes directions :
Avant Après
4
En effet, les lettres pour les différentes directions sur l’application ne peuvent être changées, elles ont donc été modifiées sur le code en accord avec l’application Pour ce qui est de la partie données (code en annexe C), un code pour le compteur geiger nous a été donné sur lequel nous avons greffé le code “ReadWrite” dans la partie “SD” des exemples de code du logiciel arduino. Les librairies “SPI.h” et “SD.h” ont été récupérées dans le logiciel pour SD.h et téléchargées depuis l’option “gérer les bibliothèques” sous le nom de “RadiationWatch” pour SPI.h Le code pour les données de radioactivités permet d’enregistrer chaque désintégration ou “coups” et se réinitialiser au bout d’une minute. Cette donnée au bout d’une minute est alors enregistrée dans la carte SD. 4 DISCUSSION SUR LES PROBLEMES TECHNIQUES Plusieurs problèmes se sont manifestés au cours de toutes les étapes dans la construction du projet. La première question que nous nous sommes posés était de savoir la façon dont on allait piloter le rover. Très vite et après quelques recherches la solution du Bluetooth paraissant la plus simple du fait que le Rover est équipé du fonction Bluetooth. Le code en lui-même n’a pas posé beaucoup de soucis, en revanche trouver une bonne application qui permettait à la 5

fois de se connecter au rover et de le piloter a été plutôt compliqué. Beaucoup d’applications permettaient de se connecter au rover mais les touches ne fonctionnaient pas. L’application envoyait bien les données, le rover recevait les informations mais l’application ne recevait rien en retour et le rover restait immobile. Heureusement certaines permettaient de modifier les touches associées aux mouvements et les mettre en adéquation avec les touches du code. Malgré tout, même si les applications se sont révélées assez pratiques, il est arrivé que certaines ne fonctionnaient plus d’une semaine à l’autre, et ce sans que le code ait été modifié entre temps, et sans aucune raison apparente. Une seule application sur un seul de nos portables est restée fiable, c’est donc celle là que nous avons utilisé par la suite. Lors de nos premiers essais, le rover ne fonctionnait que lorsqu’il était relié à l’ordinateur, pour cela, une simple batterie externe a suffi à mettre en autonomie le rover une fois débranché du PC. Lors de notre premier essai, le rover avançait à une vitesse relativement élevée (compte tenu de la taille et de la batterie qui l'alimente), mais lors de notre deuxième essai, la vitesse a alors nettement diminué, bien que la vitesse indiquée dans le code soit réglée sur son maximum possible. Après l’avoir branché sur une batterie de plus grosse capacité et après avoir enlevé du poids sur le rover, cela n’a rien changé et nous n’avons pas trouvé de solution à ce problème. Nous avons aussi rencontré des problèmes liés à l’Arduino. L’Arduino intégré dans le rover était connecté aux roues mais ne pouvait se brancher à la fois sur les moteurs et faire fonctionner le compteur Geiger en même temps. Nous avons donc dû monter un deuxième Arduino sur le rover afin que tout tienne en même temps. Problèmes donc résolu. Une fois tout monté, il restait des soucis liés au stockage de nos données. Lorsque l’on activait le compteur Geiger, la réception des données se faisait bien mais pas la conservation, elles s’effaçaient instantanément. Nous avons donc dû brancher un adaptateur pour placer une carte Micro SD. La Micro SD a elle aussi eu des problèmes par rapport à la conservation des données une fois le compteur Geiger mis en route. Le 6

problème était lié à une erreur dans le code initial de la carte SD. Le problème a donc été réglé et les données sont maintenant reçues et stockées. 5 RESULTATS Une fois que tous les problèmes ont été résolus, nous avons pu commencer à tester les différents endroits autour et à l’intérieur de l’Osuc, mais aussi à Olivet. Les résultats ont été récupérés et voici ce qu’ils donnent : Ci-dessus, voici des résultats que l’on peut qualifier de taux “faibles” car les données sont assez basses. On remarque ici que les résultats sont donnés en nombre de désintégration par minute, c'est-à-dire en cpm. Les résultats montrent que pour la zone intérieur (salle de classe au rez-de- chaussée), on obtient entre 20 cpm et 71 cpm. D’autres zones montrent des résultats similaires à ceux obtenus dans la zone intérieure. Ces deux zones sont la machine à café et l’entrée de l’Osuc (intérieur). On peut voir que les résultats présentent eux aussi des taux faibles de cpm, allant de 17 cpm à 33 cpm. On notera par ailleurs que ces deux dernières zones présentent des taux de désintégration plus faibles que la zone Intérieure. 7

les zones présentent de faibles radiations, ce qui est rassurant, les salles de cours sont saines ! La zone présente au niveau de l’entrée de l’Osuc montre une radiation bien plus importante que les zones vues précédemment, entre 87 cpm et 308 cpm. En avançant sur le parking, on remarque la présence de granite, les granites sont connus pour être légèrement radioactifs. On observe ici que le nombre de cpm est bien plus élevé que tous les autres endroits. Les données se rapprochent de l’entrée extérieur de l’Osuc (cette zone présente peut être elle aussi des granites au alentours que nous n’avons pas vu). Les résultats montrent des radiations allant de 139 cpm à 555 cpm. Ces taux sont plus élevés que le reste mais ne sont pas dangereux pour autant. Nous avons toutefois trouvé des résultats extrêmement élevés par rapport au reste, allant jusqu'à 2000/3000 cpm. Ils ont été captés dans une zone d’Olivet(Jardin), dans la forêt à côté du parking (Pinède) et derrière l’Osuc (présence de granite). Il s’est avéré que l’action des photons engendrait des données trop élevées et un simple carton sur le rover a permis de résoudre le problème. 8
Malgré quelques données corrompues, le rover a permis de capter des informations conformes aux attentes. Les zones présentant des roches légèrement radioactives ont donné des taux de désintégration par minute plus élevés que les zones intérieures de l’Osuc comme les salles de cours ou la machine à café. 6 CONCLUSIONS ET PERSPECTIVES L’élaboration de ce projet a permis de se rendre compte que ce n’était pas si facile. Néanmoins, les erreurs de codages, de branchages ainsi que les erreurs d’applications de téléphone et tous les autres petits soucis rencontrés nous ont permis d’en apprendre plus et d’évoluer ainsi que de devenir nettement plus efficaces au fil des semaines. Les applications téléphone nous ont beaucoup ralenties car, comme précisé au dessus, nous avons passé beaucoup de temps à programmer comme il faut les applications, à connecter nos téléphones au rover. Toutefois, ces applications nous ont permis d’en apprendre plus sur le fonctionnement du rover et sur les lignes de code qui correspondaient aux échanges de données par exemple. Également, ces applications nous ont été vraiment utiles et c’est important de le souligner. 9

De plus, nos faibles connaissances en matière de codage ont été un léger frein à l’élaboration du projet. L’autre point qui aura sûrement été une déception plus qu’autre chose, ainsi qu’une question auquelle nous n’avons toujours pas la réponse, est la vitesse du rover. Si jamais nous devions nous repencher sur ce projet pour y apporter des améliorations il faudrait absolument régler ce soucis. Mais pour finir sur une note plus positive, il faut souligner que nous avons réussi à venir à bout de ce projet dans les temps et que c’est une réussite. Pourquoi pas ensuite réutiliser ce type de rover pour y mettre d’autres types de capteurs pour recueillir des données dans le cadre de projets géologiques par exemple. L’avantage de ce type de rover c’est l’adaptabilité, la taille et la possibilité d’y mettre ce qu’on veut dessus, il est donc facile de l’adapter à toutes les situations, et pas que dans la géologie! 7 ANNEXE A. Montage du Rover 10
B. Code pour le mouvement du Rover : //Standard PWM DC control int E1 = 5; //M1 Speed Control int E2 = 6; //M2 Speed Control int M1 = 4; //M1 Direction Control int M2 = 7; //M1 Direction Control ///For previous Romeo, please use these pins. //int E1 = 6; //M1 Speed Control //int E2 = 9; //M2 Speed Control //int M1 = 7; //M1 Direction Control //int M2 = 8; //M1 Direction Control #define PERIOD 60000.0 // (60 sec) one minute measure period 11
volatile unsigned long CNT; // variable for counting interrupts from
dosimeter
unsigned long dispPeriod; // variable for measuring time
unsigned long CPM; // variable for measuring CPM
void stop(void) //Stop
{
digitalWrite(E1,LOW);
digitalWrite(E2,LOW);
}
void advance(char a,char b) //Move forward
{
analogWrite (E1,a); //PWM Speed Control
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void back_off (char a,char b) //Move backward
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void turn_L (char a,char b) //Turn Left
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void turn_R (char a,char b) //Turn Right
{
analogWrite (E1,a);
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void setup(void)
{
CNT = 0;
CPM = 0;
dispPeriod = 0;
12attachInterrupt(1,GetEvent,FALLING); // Event on pin 2
int i;
for(i=4;i=dispPeriod + PERIOD) { // If one minute is over
CPM = CNT;
CNT = 0;
dispPeriod = millis();
}
char val = Serial.read();
if(val != -1)
{
switch(val)
{
case 'U'://Move Forward
advance (255,255); //move forward in max speed
break;
case 'D'://Move Backward
back_off (255,255); //move back in max speed
break;
case 'L'://Turn Left
turn_L (100,100);
break;
case 'R'://Turn Right
turn_R (100,100);
break;
case 'z':
Serial.println("Hello");
break;
case 'C':
stop();
break;
}
}
13// else stop();
}
void GetEvent(){ // Get Event from Device
CNT++;
}
C. Code pour le compteur geiger et l’enregistrement sur la carte
SD
#define PERIOD 60000.0 // (60 sec) one minute measure period
volatile unsigned long CNT; // variable for counting interrupts from
dosimeter
unsigned long dispPeriod; // variable for measuring time
unsigned long CPM; // variable for measuring CPM
/*
SD card read/write
This example shows how to read and write data to and from an SD card
file
The circuit:
SD card attached to SPI bus as follows:
** MOSI - pin 11
** MISO - pin 12
** CLK - pin 13
** CS - pin 4 (for MKRZero SD: SDCARD_SS_PIN)
created Nov 2010
by David A. Mellis
modified 9 Apr 2012
by Tom Igoe
This example code is in the public domain.
*/
#include
#include
File myFile;
14void setup() { // setup
Serial.begin(9600);
CNT = 0;
CPM = 0;
dispPeriod = 0;
attachInterrupt(0,GetEvent,FALLING); // Event on pin 2
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.print("Initializing SD card...");
if (!SD.begin(4)) {
Serial.println("initialization failed!");
while (1);
}
Serial.println("initialization done.");
myFile = SD.open("test.txt", FILE_WRITE);
// if the file opened okay, write to it:
if (myFile) {
Serial.print("Writing to test.txt...");
myFile.println("testing 1, 2, 3.");
// close the file:
myFile.close();
Serial.println("done.");
} else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
}
void loop() {
//Serial.print("CPM:");
Serial.println(CNT);
if (millis() >=dispPeriod + PERIOD) { // If one minute is over
CPM = CNT;
15CNT = 0;
dispPeriod = millis();
myFile = SD.open("test.txt", FILE_WRITE);
myFile.println(CPM);
myFile.close();
}
}
void GetEvent(){ // Get Event from Device
CNT++;
}
16Vous pouvez aussi lire