Contrôle moteur : La coordination des mouvements - UFR STAPS UE 23 Semestre 2, 2020-2021 - Moodle ...
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Contrôle moteur :
La coordination des mouvements
UE 23 Semestre 2, 2020-2021
Resp. Julien Lagarde
UFR STAPS
Université Montpellier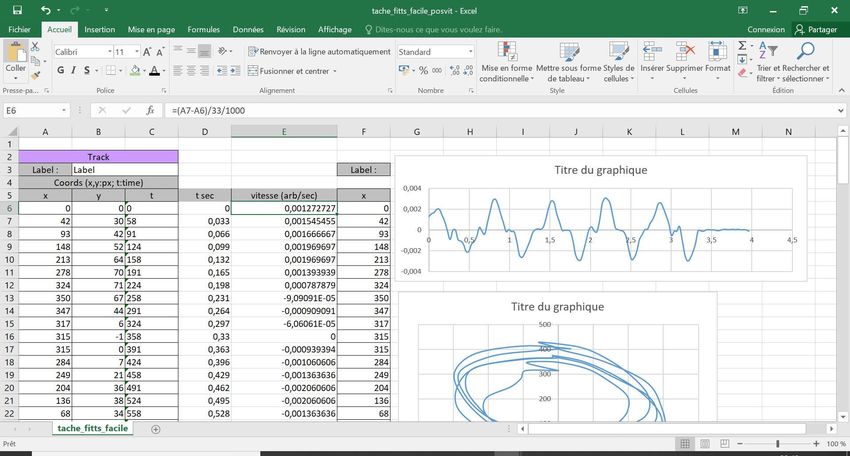
Présentation des objectifs du cours Découvrir les principaux invariants du mouvement humain Apprendre à reconnaître les formes de mouvements Apprendre à classer les types de mouvements Décrire les mouvements
Moodle
Faculté des Sciences et Techniques des Activités Physiques et Sportives
(STAPS) / ► UE20 Contrôle Moteur / ► Généralités / ► Lectures obligatoires
Texte 1 : P 1-7 Chapitre 9, Marcher, un défi à la complexité.
Référence : Alain Berthoz (2009). La simplexité. Odile Jacob
Texte 2 : P 8-12 Les lois du mouvement naturel.
Référence : Alain Berthoz (2009). La simplexité. Odile Jacob
Texte 3 : P 13-18 Le mouvement naturel.
Référence : Alain Berthoz (). Le sens du mouvement. Odile Jacob
Texte 4 : P 19-22 Des mains à la conquête du cerveau.
Référence : Pascal Giraux, Angela Sirigu. Les dossiers de la recherche num 40 2010.
Texte 5 : P 23- 30 Ces neurones qui modèlent la civilisation.
Référence : Ramachandran, V. (2011). Le Cerveau fait de l'Esprit : Enquête sur les neurones miroirs. Dunod.
Texte 6 : P 31-34 Comment la répétition façonne nos habitudes.
Référence : Hélène Beaunieux, Les dossiers de la recherche num 40, 2010
Texte 7 : P 35-40 Tout le monde sait-il ce qu’est l’attention ?
Référence : Lachaux, J. P. (2011). Le cerveau attentif : contrôle, maîtrise et lâcher-prise. Odile Jacob.
lectures_L1_S2_UE20_Cont_Mot_2018.pdf
+ Pré-requis : Feyman_Mecanique_Chap_mouvement.pdf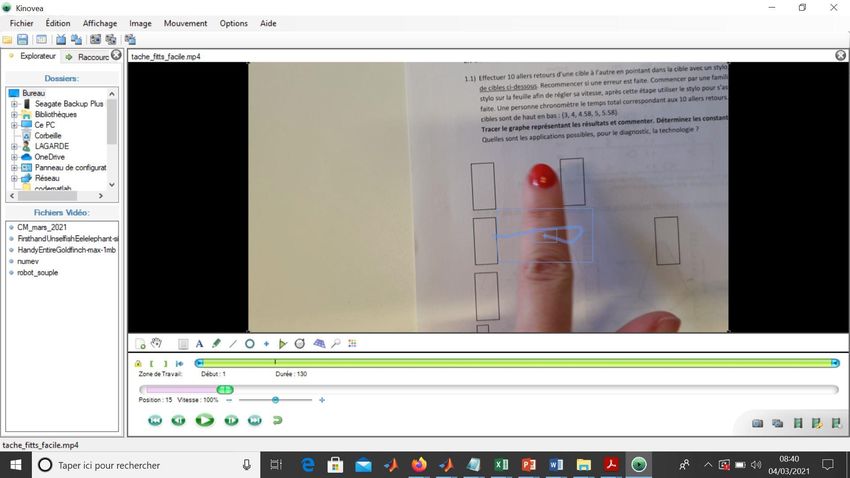
Plan du cours de Julien Lagarde
1) Définition de la coordination des mouvements. Formation de patron par
apprentissage.
2) Exemple de classification des mouvements :
- Décomposition du jonglage.
- Rappels utiles : Cinématique (du point).
3) Invariants du mouvement.
3.1 La redondance articulaire : Définition et rôle de la raideur dans la
coordination.
3.2 Les changements de coordination (Patrons de coordination).
3.3 L’information utile pour réguler le mouvement : Intercepter une balle
ou un moustique, salto arrière, percevoir « le temps qui reste ».
3.4 Synchronisation : Illustration homme- cheval.
3.5 Des lois d’optimalité : Minimum jerk, applications.
3.6 Régularités dans l’action locomotrice.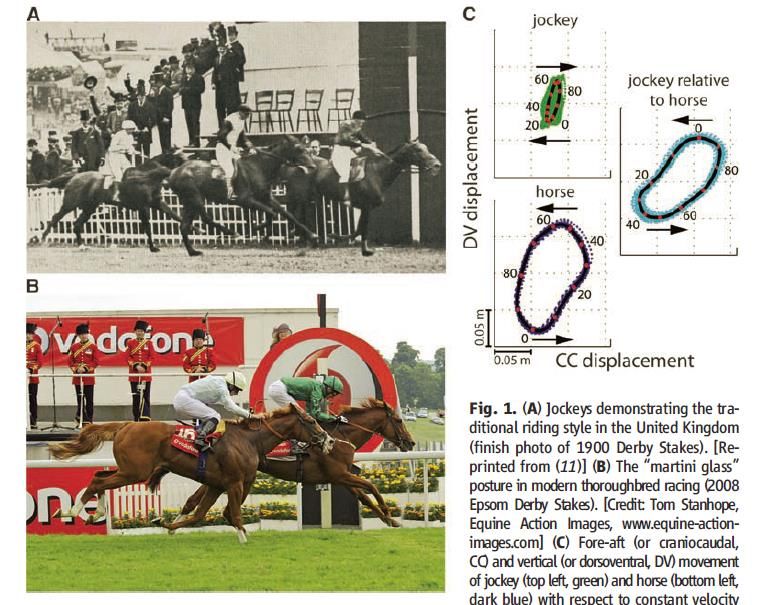
Le « contrôle » moteur : Au carrefour de plusieurs domaines
scientifiques
- Biomécanique
- Neurosciences
- Psychologie expérimentale
- Physiologie de l’exercice
Production d’actions (volonté, buts, réactions)
Lois physiques : gravité, inertie, Newton
Articulations- muscles
Système nerveux
Connexion cerveau- monde par le corps en mouvement (création de sensations)
Perception et mouvements
Lois physiques Échelles corps : Newton Echelles cellules : Newton, diffusion (mouvement brownien/ microscopique- ions), champs électriques
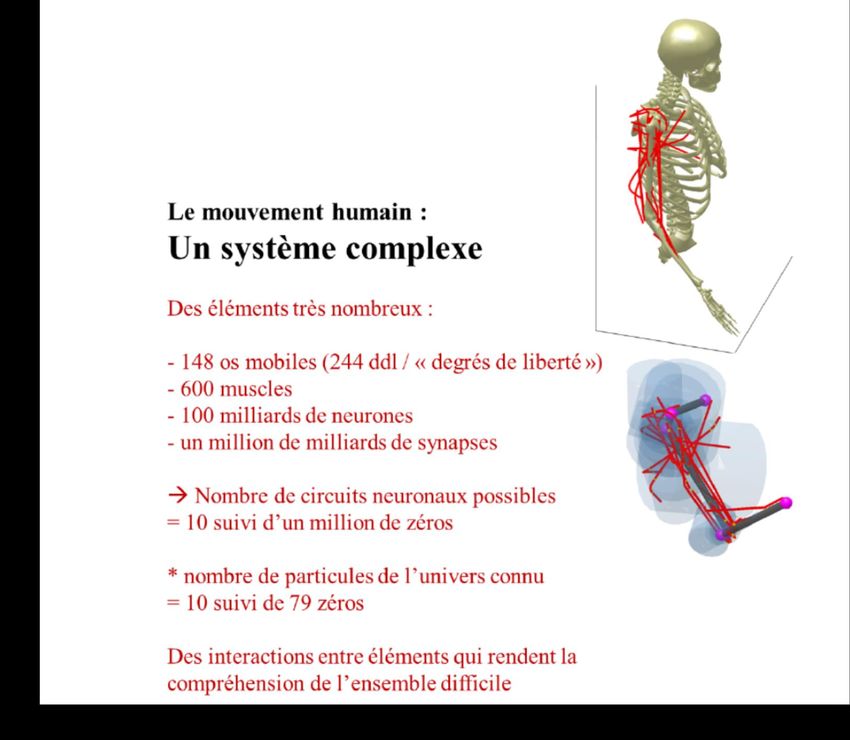
Simplicité et complexité

L’expérience de Fitts (1954):
La découverte de lois ? Lesquelles ? Pour quoi faire ?
Atteindre une cible Coordination du bras/ buste / tête Trajectoire de la Main vers l’objet- cible : vision pour l’espace Cerveau : motricité et vision
Perception- mouvement
Du corps/ au service de buts
vision
Feedback sensoriels
Proprioception : position et vitesse
Coordination œil- main- objet :
Génétique et apprentissage essai erreur et imitation /
enfantUne loi simple…
MAIS pourtant :
Des processus sous jacents à d’autres échelles
(cellulaires) très nombreux et riches
(« complexes »)
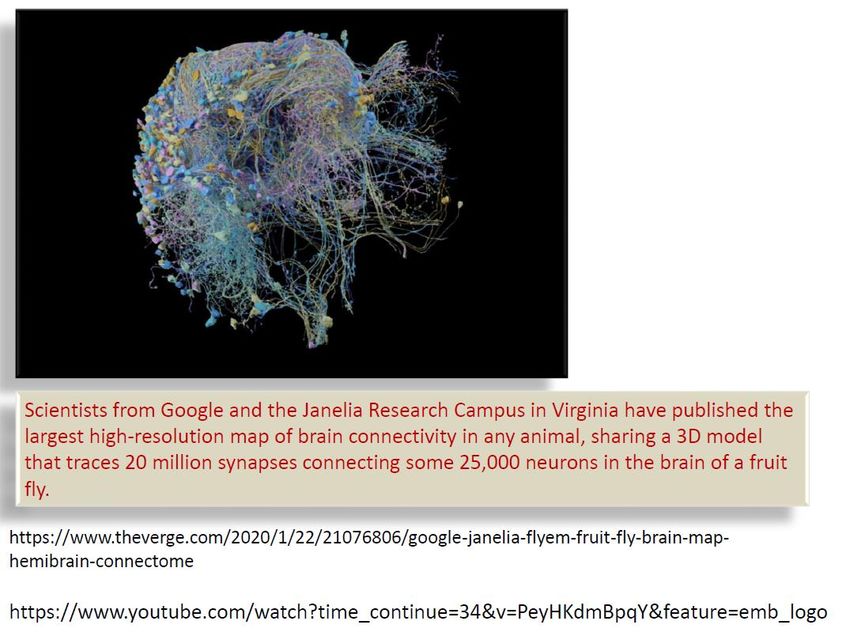
Le système nerveuxIllustration : Cerveau humain
« Connectome »Le cerveau de la « mouche à fruit »
Le cerveau humain
Des millions de milliards de réseaux
100 milliards de neurones de neurones
10 000 connexions par
neurones vers d’autres
neuronesA
B
C
Combien de réseaux ?
{A;B}
{A;C}
{C;B}
{A;B;C} N=4A A
B B
D
C C
≠
Combien de réseaux entre neurones ?Utilisation de Kinovéa : logiciel gratuit pour mesurer des positions dans le plan à partir de vidéos
Calcul de la vitesse et graphiques (nuages de points : 1) vitesse et temps, 2) vitesse et position
1) vitesse
0,004
0,003
un autre graphique avec la fonction "nuage de
0,002
vitesse
0,001
points" : sélectionner deux colonnes et insérer 0
"nuage de points" : 1) vitesse et temps, et 2) -0,001 0 0,5 1 1,5 2 2,5 3 3,5 4
-0,002
positions(t) et vitesses(t) -0,003
-0,004
il s'agit d'un graphique qui permet de
superposer les trajectoires : temps
- on voit la présence de variabilité entre
pointages (petits changements de forme 2)
spécifique de chaque pointage) et Vitesse & position
d'invariance (forme générale commune à Pic de 500
tous les pointages. vitesse 400
- -> on visualise la forme de la cinématique.
Cela correspond aussi aux deux variables
300
position
classiques de l'espace d'état d'un système
200
dynamique. 100
Pic de
- On voit clairement les variations de vitesse -0,004 -0,003 -0,002 -0,001
0
0 0,001 0,002 0,003
vitesse
0,004
selon la position près/ loin de la cible (les -100
extrema de la position).
vitessecibles
0,004
0,003 cible
cible
0,002
0,001
vitesse
0
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
-0,001
-0,002
-0,003
-0,004 Pic de vitesse Pic de vitesse
temps
ciblesLa solution : La coordination
Introduction au problème fondamental du contrôle moteur :
La coordination
Bernstein, N. A. (1967) The coordination and
regulation of movements. London, Pergamon.
Sherrington, C. S. (1906) The integrative action
of the nervous system. London, Constable.
von Holst, E. (1939/1973). The behavioral
physiology of man and animals. Coral Gables,
FL., University of Miami Press.
Lashley, K. S. (1930). Basic neural mechanisms
in behavior. Psychological review, 37(1)Monde, objet,
Comportement et perception partenaire,
adversaire
Reconnexions,
apprentissages
plasticité
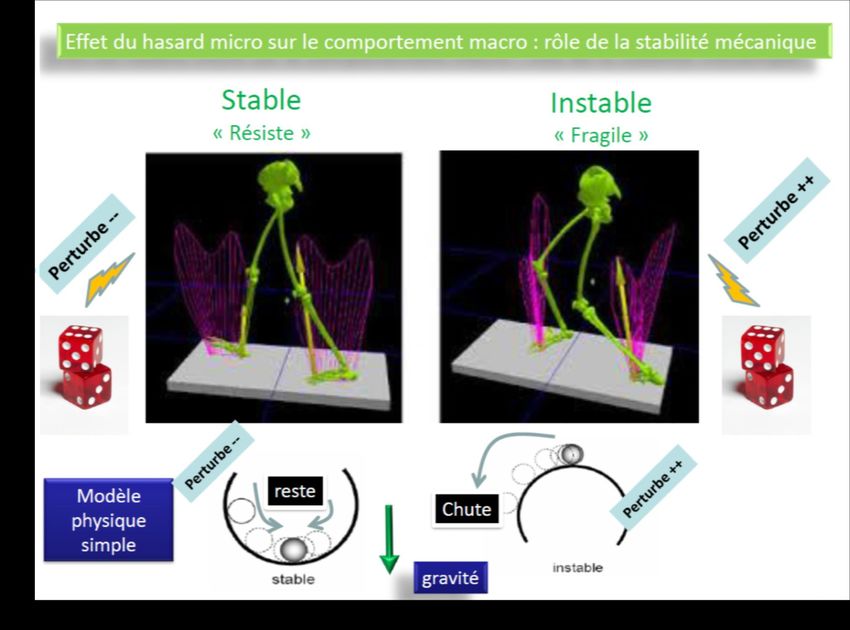
Répétition et découverte des bons mouvements : apprentissagePropriétés élémentaires de nos coordinations
De la cellule au comportement
Echelle « micro » (atomique) : Aléas Film du mouvement Brownien
Erreurs comportementales
Macro
Neurone(s) et
Réseaux de neurones
Canaux ioniques de la
membrane du neurone
Désordre, hasard
Agitation moléculaire Micro
(fluctuations thermiques)Agitation neurone
moléculaire zoom
« hasard »
zoom
Canaux et pompes à ions »
Dans les membranes des neurones
Neurone
Potentiel d’action
Trajectoires de mouvement x 10 000 fois
Cas idéal non biologique :
Sans perturbations
Réalité : cas biologique, = cas
« bruit » ou « hasard » ou
idéal + perturbations par le
« fluctuations »
« bruit » moléculairePré-ambules : le jonglage comme introduction à la coordination
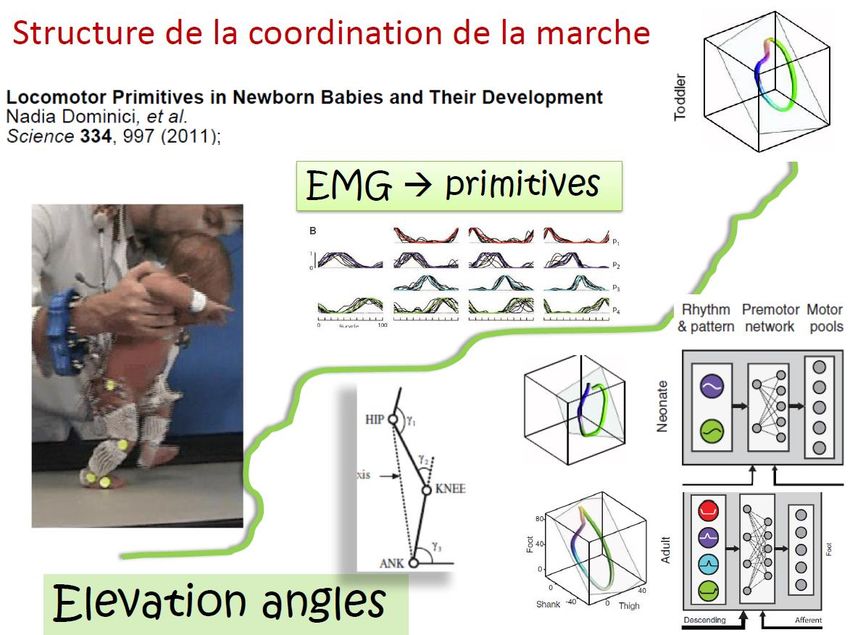
Angles articulaires…
Angles du brastemps Angles articulaires
nchronisation entre articulations des bras
tempsAnalyse des habiletés dans le jonglage
Bergamasco, M., Bardy, B., & Gopher, D. (2012). Skill training in multimodal virtual environments. CRC Press.
Lagarde, J., Zelic, G., Avizzano, C. A., Lippi, V., Ruffaldi, E., Zalmanov, H., ... & Mottet, D. (2011). Evaluation of
the light weight Juggling system. In BIO Web of Conferences (Vol. 1, p. 00053). EDP Sciences.
https://www.bio-conferences.org/articles/bioconf/pdf/2011/01/bioconf_skills_00053.pdfReprise : En TD un outil gratuit d’analyse du mouvement, Kinovéa En développement, en 2020
Précision, définitions
Processus cognitifs
Processus sensorimoteursProcessus cognitifs : manipulation mentale de symboles, images, mots, signes.
Permet de définir, analyser, résoudre des problèmes.
Symboles mentaux : il s’agit de représentations mentales. RE- présentations formées
par notre cerveau dans notre esprit. Ex. : activité d’imagerie mentale avant une
performance par un athlète.
- Ces opérations mentales (analyse-décompositions en étapes de séquences, mise en
ordre temporel (procédures : faire ceci puis cela), visualisations, peuvent être
considérées comme des « outils » mentaux qui permettent de résoudre des pbs,
d’améliorer les performances (mémorisation, réduction du stress).
- Nb : Ne sont pas nécessairement conscients : une partie peut l’être, mais certains
aspects de ces processus sont inconscients (nous n’avons pas accès à l’ensemble des
activités synaptiques !!).
Processus sensorimoteurs : Ici on met l’accent sur l’exécution du mouvement,
ancrée dans l’interaction physique (mécanique) avec notre environnement (ex:
objets, gravité, sol, autres personnes). La formation et manipulation de symboles
mentaux n’est pas impliquée.
- Nb : Ici encore la conscience n’est pas nécessairement impliquée, une partie de nos
actions est accessible à la conscience, une partie non.
Les deux processus sont en permanence en interaction.5 tâches principales du jonglage :
Habilétés sensorimotrices :
Habilétés cognitives :
Tableau à 2 entrées X variations Décomposition des tâches Hiérarchie- graphes Autres
Pause : Prérequis et rappels utiles
Vitesse moyenne et
vitesse instantanéeLecture obligatoire du cour : Chapitre Richard Feyman
Vitesse moyenne
x
x init
Init = abrégé pour « initial »
x final
t
t init t final
O(0,0)
D = distance = x final – x init
durée = t final – t init
V moyenne de t init à t final = (x final – x init)/ t final _ t initV
V
1
2
D t durée
durée
V V
3
durée D
1 V = D/durée = m/s
2 D = v x durée = m/s x s = m
D
durée 3 durée = D/v = m / m/s = m x s/ m = sVitesse instantanée Même idée que pour la vitesse moyenne : mais on réduit (infiniment) l’intervalle de temps entre initial et final. Ceci jusqu’à considérer un intervalle tellement petit qu’il ne contient qu’un seul point. Cet intervalle a encore une durée, mais très très très petite ! Chacun des points a ainsi une vitesse, et la vitesse peut changer d’un point au suivant (pendant une accélération ou une décélération par exemple) Le fait que chaque point possède une vitesse est démontré par le fait que notre voiture possède une énergie cinétique à chaque point pendant un trajet, si je heurte un obstacle en un point du trajet je casse ma voiture car elle possède de l’ énergie cinétique en ce point qui est absorbée par le choc, il faut donc bien qu’elle possède une vitesse en ce point ! CQFD
ZOOM
x
x
x init
Un point sur le trajet
x final
Δx
O(0,0) t
t init t final
t
O(0,0) Δt
Vitesse moyenne Vitesse instantanée : Δ t = tout petit
x final – x init = Δ x Δ t = tout petit
t final – t init = Δ t = infiniment petit : « tout proche de zéro »
La vitesse instantanée = dans cette durée
très petite
La vitesse existe à chaque pointInvariant #1 : La redondance articulaire
Ps : il y a aussi une redondance musculaireCo-contraction musculaire => raideur articulaire
Co-contraction musculaire => raideur articulaire (2)
Invariant #2 : Les changements de forme de
coordination (Patrons de coordination)
(Muybridge, Animals In Motion, 1899)Walk-Run transitions Walk Run
Contrôle + coordination + optimisation (économie, coût)
Invariant #3 : L’information utile pour réguler le mouvement Apprentissage et « contrôle et coordination Apprendre : Modification relativement permanente du comportement du fait de la répétition
L’information pour ajuster le mouvement… (1)
L’information pour ajuster le mouvement… (2) :
- être au bon endroit au bon moment -L’information pour ajuster le mouvement… (3)
L’information pour ajuster la coordination
œil
Sol
- Moment d’inertie
- Régulation finale
- Temps restantInvariant #4 : La synchronisation
La coordination temporelle entre
un cavalier expert et son chevalInvariant #4 : La synchronisation
Illustrations / Films d’un cavalier expert, d’un cavalier intermédiaire
Invariant #5 : Des lois d’optimalité
« jerk » = d (accélération) /dt = dérivée de l’accélération « Smooth » = « lisse » Le mouvement efficient est lisse La loi est dite « minimum de secousse » : parmi les mouvements possible, le mouvement sain ou le mouvement expert est le plus lisse
Vous pouvez aussi lire