Dossier de candidature au d efi H Projet Cherry
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Dossier de candidature au défi H
Projet Cherry
Equipe projet
Etablisement : ENSEIRB-MATMECA et ENSC (Bordeaux INP)
Cursus / Formation : 3eme année d’école d’ingénieur en robotique (Issu de
Cognitique, d’Electronique et d’Informatique)
Coordinatrice : Khoudeir Laura
Téléphone : 06 88 47 49 92
E-mail : projet.cherry@gmail.com
Association partenaire
Nom : Prim@
Adresse du siège social : 42 rue du Bocage 33200 BORDEAUX
Site internet : www.asso-prima.org
E-mail : contact.prima@laposte.net
Nombre d’hadérents : 72
Nom du président : Florence Gauté
Table des matières 1 Le projet Cherry 1 1.1 Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1.2 Cherry et l’innovation . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1.3 Pertinence du projet . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.4 Ressources au service de Cherry . . . . . . . . . . . . . . . . . . . . . 5 1.5 Objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.6 Planing prévisionnel . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.7 Projections financières . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Projet Cherry
1 Le projet Cherry
1.1 Résumé
Le projet Cherry est né de l’association de quatre étudiants ingénieurs en robo-
tique et de l’association Prim@. Il vise à l’implémentation d’un robot humanoı̈de
capable d’agir comme compagnon auprès d’un enfant en situation d’hospitalisation
ou d’isolement et de lui permettre de communiquer avec le monde extérieur, notam-
ment avec sa classe et son enseignant, afin de maintenir ses interactions sociales et
de faciliter sa réinsertion en milieu scolaire classique à sa sortie de l’hôpital.
Ce maintien du lien social et éducatif doit permettre de réduire le traumatisme
inhérent à ce type d’expériences, qui peuvent marquer un enfant à vie. Le risque
réel sous-jacent est l’impact de cette expérience sur les chances de l’enfant à accéder
au marché du travail puisqu’il n’aura pas pu suivre ses études dans d’aussi bonnes
conditions que ses pairs. En réduisant ce risque de fracture, il convient ici de per-
mettre aux jeunes patients de développer les compétences et qualités qu’ils auraient
développées s’ils n’avaient pas été hospitalisés.
Quatre étudiants de l’option robotique l’ENSEIRB-MATMECA s’associent donc
à l’association prim@ représentée par sa Présidente Mme Gauté et à M. Lapeyre
de l’équipe Flowers de l’INRIA, qui a développé le robot Poppy sur lequel le projet
sera basé.
Présente depuis presque 10 ans dans les établissements de santé bordelais, l’as-
sociation prim@ travaille à faciliter l’accès des enfants hospitalisés à des contenus
multimédias et pédagogiques. L’une de ses principales actions auprès des jeunes
en situation d’isolement hospitalier est le développement d’une application Web
nommée Prim@Kid, permettant aux enfants de surfer sur le net de façon sécurisée,
et de recevoir et envoyer des messages à leur famille, leurs amis ou leurs enseignants.
Cette application répond à un besoin de rompre l’isolement et de favoriser la scola-
risation des enfants hospitalisés, ce qui est également le but du projet Cherry.
Notre robot sera basé sur Poppy, un robot humanoı̈de open source hautement
adaptatif et imprimé en 3D développé à l’INRIA. Le but de l’utilisation de Poppy
est d’assurer le lien quotidien de l’enfant avec le monde extérieur, de faciliter et
d’accompagner son suivi scolaire en positionnant Poppy à ses côtés à l’hôpital.
Le robot se veut adaptatif pour permettre d’accompagner un maximum d’enfants
d’âges et de pathologies différents.
1/9
Projet Cherry
1.2 Cherry et l’innovation
Depuis une dizaine d’années la robotique a commencé à être utilisée et acceptée
en milieu hospitalier. Dans un premier temps en tant qu’outil de chirurgie, comme le
robot Da Vinci d’Intuitive Surgical, puis en tant qu’outil d’interaction avec autrui.
On pourra par exemple noter l’utilisation de solutions robotiques autonomes dédiées
au transport de matériel au CHU de Nantes (ces outils sont développés par la société
Vecna).
Figure 1 – Robot d’assistance à la
chirurgie Da Vinci de Surgical System Figure 2 – Robot “infirmier” HOSPI
de Panasonic
Cependant l’utilisation de robot comme outil de communication sociale est bien
plus récente et se divise en deux catégories : d’un côté les robots d’accueil, permet-
tant au personnel hospitalier de déléguer certaines tâches, et de l’autre les solutions
de télé-présence.
Il existe en effet déjà dans certain hôpitaux japonais des robots conçus par Pa-
nasonic capables d’aller chercher les médicaments des patients et de les apporter
à l’infirmière au bon moment. D’autres solutions existent pour la distribution des
repas par exemple. Néanmoins ces robots n’ont qu’une fonction utilitaire et n’inter-
agissent que peu avec les personnes qui les entourent.
2/9
Projet Cherry
Figure 3 – Robot RP-Vita de InTouch Health
Les robots permettant l’interaction avec autrui sont, aujourd’hui, essentiellement
des systèmes de télé présence, comme le RP-Vita de InTouch Health et iRobot Corp,
autorisant le médecin à rendre visite à ses patients, voir à pratiquer des diagnos-
tics. Il n’existe cependant que peu de projets utilisant la robotique comme outil
de communication avec les patients. Le robot Beam Pro du lyonnais Awabot a été
utilisé par Central Lyon pour permettre à un de ses étudiants de suivre les cours
par télé-présence. Le robot Nao d’Aldebaran, dans le cadre du projet Avatar Kid,
soutenu par Samsung, pour un hôpital de Bâle, a permis à un enfant en hospitalisa-
tion longue durée de l’utiliser comme un extension de lui dans sa classe. Comme son
nom l’indique, Avatar Kids implémente un avatar des enfants au travers de Nao. Le
robot est placé dans la classe et doit étendre la présence de l’enfant. Cet axe pose des
problématiques réelles selon la pathologie de l’enfant qui n’est pas nécessairement
apte à suivre les cours au même rythme que ses camarades. Si bien que le robot
peut alors matérialiser la souffrance de l’enfant auprès de ses camarades qui sont
témoins de ses difficultés à suivre leur rythme.
Malheureusement ces initiatives ne sont conçues qu’au cas par cas et non pour
être généralisées à large échelle. C’est sur cet axe que Cherry tire sa force et son
innovation : Ne plus limiter le robot à un système de télé-présence ou un avatar, mais
le voir comme un relais de communication à part entière avec l’enfant et un vecteur
de soutien dans sa scolarité et sa socialisation. Par ailleurs, la capacité d’adapter
ce relais selon les préconisations des médecins présente l’intérêt d’élargir la cible
d’enfants pouvant être aidés par ce projet. Il est du ressort du médecin de choisir à
quel enfant il peut proposer d’interagir avec Cherry, qui s’adresse potentiellement à
l’ensemble des enfants en milieux hospitalier. Cherry intervient auprès de l’enfant
malade ou blessé en tant que compagnon, expérimentation qui n’a encore jamais eu
lieu à ce jour.
Poppy est une des rares solutions à disposition en robotique pouvant se permettre
de faire preuve d’autant de flexibilité. Contrairement à d’autres robots comme le Nao
d’Aldebaran, l’accès à son code source est aisé et complet. L’emploi d’un système
électronique open-source nous permet de ne pas nous limiter en termes de matériel,
puisqu’il est possible de l’implémenter selon les besoins. Il en va de même pour sa
forme, puisque la structure de Poppy est intégralement reproductible par impression
3D. Ces caractéristiques en font également l’un des robots humanoı̈des les plus
financièrement abordables.
3/9
Projet Cherry
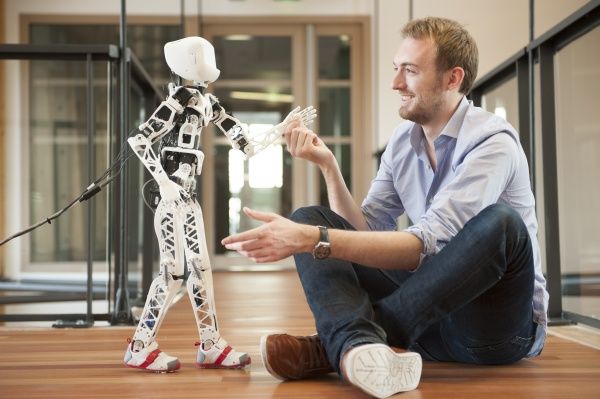
Figure 4 – Le Robot Poppy
Le projet Poppy est à l’origine un projet académique, hébergé par l’INRIA Sud-
Ouest, mais un de ses enjeux principaux est la constitution d’une communauté
d’utilisateurs plus riche que le simple monde de la recherche. C’est là aussi que
réside une des grandes forces de Poppy : un groupe d’utilisateurs, large, diversifié et
explorant toutes les pistes offertes par l’utilisation du robot. Le projet Cherry cher-
chera également à s’inscrire dans cette communauté en documentant régulièrement
son travail auprès des autres utilisateurs.
1.3 Pertinence du projet
Une vie professionnelle réussie passe d’abord par une bonne formation. Il est
donc primordial d’assurer aux enfants en situation de handicap, quels qu’ils soient,
l’accès à un suivi scolaire adapté de qualité.
Selon la loi du 4 mars 2002 relative aux droits des malades, ”Dans la mesure
où leurs conditions d’hospitalisation le permettent, les enfants en âge scolaire ont
droit à un suivi scolaire adapté au sein des établissements de santé”. Malheureuse-
ment, en pratique les solutions proposées dépendent principalement des associations
présentes dans le centre hospitalier. Elles sont très hétérogènes d’un hôpital à l’autre,
notamment dans les petites structures. D’une façon plus générale, elles présentent
peu de flexibilité au regard de la condition de l’enfant en raison d’un manque de
moyens et de personnel enseignant.
Le projet Cherry vise à améliorer l’accès des enfants à des contenus multimédias
pédagogiques. En plus de servir de vecteur d’information, Cherry les soutiendra dans
leur travail scolaire. Ses fonctions seront ajustables par les enseignants et le person-
nel soignant, permettant d’adapter au maximum le rythme scolaire à la condition de
l’élève. Cette personnalisation du suivi de l’enfant aidera à maintenir son moral en
évitant de le mettre inutilement en difficulté et permettra de limiter le décrochage
scolaire, favorisant ainsi une réinsertion scolaire ultérieure. Cherry a également vo-
cation, grâce à sa structure humanoı̈de, d’aider à briser l’isolement de l’enfant en
lui offrant la possibilité d’interagir socialement avec lui. L’enfant bénéficiera ainsi
d’un compagnon au quotidien, et d’une présence physique amusante.
Les robots humanoı̈des suscitant une forte adhésion chez les enfants, Cherry
pourra donc les encourager à échanger, à jouer et à s’instruire.
4/9
Projet Cherry
1.4 Ressources au service de Cherry
Nous sommes quatre étudiants ingénieurs de l’ENSEIRB-MATMECA et de
l’ENSC à porter le projet Cherry. Nous venons de formations initiales différentes,
à savoir électronique, informatique et cognitique. Grâce à un partenariat entre nos
écoles, nous suivons une troisième année ensemble en option robotique. La diversité
de nos formations nous permettra d’aborder Cherry sous des angles complémentaires,
nous permettant d’apporter la solution la plus complète possible.
Figure 5 – De gauche à droite : Jean, élève cogniticien de l’ENSC, Laura et So-
phie, élèves ingénieures en électronique à l’ENSEIRB-MATMECA et Thomas, élève
ingénieur en informatique à l’ENSEIRB-MATMECA.
Cherry sera construit sur la base physique de Poppy, un robot humanoı̈de open
source hautement adaptatif développé par l’équipe de chercheurs de Flowers à l’IN-
RIA de Bordeaux. Sa flexibilité de développement nous laisse une large marge d’ac-
tion pour ce projet. Nous espérons ainsi pouvoir adapter notre robot aux besoins
spécifiques de chaque enfant.
Figure 6 – Poppy et son créateur Matthieu Lapeyre
5/9
Projet Cherry
Le robot Poppy nous est gracieusement prêté par Matthieu Lapeyre, du labo-
ratoire Flowers, qui pourra nous aider de ses connaissances si nous rencontrons des
obstacles techniques trop importants au long de notre projet. Nous aurons accès à
la fois au robot lui-même et à un simulateur nous permettant de tester notre travail
à tout moment. Les développeurs de Poppy fournissent également une librairie per-
mettant de programmer le robot en langage python. Il nous sera également possible
d’imprimer en 3D notre propre version du squelette du robot si nécessaire.
Pour ce projet nous avons la chance de collaborer avec l’association Prim@ et sa
présidente Mme Gauté. L’association soutient l’accès à des contenus multimédias et
internet sécurisés pour les enfants hospitalisés. Elle a ainsi équipé plus d’une cen-
taine de chambres pédiatriques d’ordinateurs et de son logiciel spécialisé Prim@kid,
principalement dans la région de Bordeaux.
Prim@Kid regroupe un ensemble de services multimédias utilisables par inter-
net et permettant à l’enfant de se trouver en visioconférence avec sa famille ou une
salle de classe par exemple, de consulter les devoirs de son professeur, les conte-
nus d’enseignement déposés par leur professeur, etc. L’association Prim@ œuvre
quotidiennement pour offrir un accès au numérique depuis les services de pédiatrie
des centres hospitaliers. Nous nous appuierons donc sur le travail fourni par Prim@
quant à l’évolution des mentalités des milieux hospitaliers vis à vis du numérique
ainsi que l’identification de services permettant de favoriser le maintien du lien
social de l’enfant pour permettre à Cherry de remplir au mieux sa mission d’accom-
pagnement. De plus, nous pourrons implémenter une fonction permettant à Cherry
de s’interfacer avec le logiciel Pim@kid existant.
Le projet bénéficiera également des conseils d’un coach Sogeti. Nous avons pour
l’instant été conseillés par Maximilien Oberlis, chef de projets Innovants chez Sogeti.
Nous comptons sur Sogeti pour accélérer notre projet grâce au rythme instauré par
la compétition et les conseils des professionnels que nous pourrons rencontrer durant
ces cinq mois.
1.5 Objectifs
D’ici avril 2015, nous comptons obtenir une version fonctionnelle du robot à
présenter au jury, ayant à sa disposition les fonctionnalités principales nécessaires
à Cherry pour accomplir sa mission d’aide aux enfants hospitalisés.
Cherry comptera ainsi des fonctions d’aide scolaire (restitution des cours, exer-
cices simples. . . ) mais aussi des fonctions ludiques qui en feront le compagnon quo-
tidien de l’enfant, comme un affichage d’émotions et la lecture et l’envoi de messages
écrits ou vocaux.
Nous créerons également un logiciel de programmation simple du robot, qui
permettra à l’enfant de s’amuser à programmer et à personnaliser son Cherry. Selon
l’avancée du projet et les retours de l’association prim@ ou des enfants eux-mêmes,
nous chercherons à implémenter de nouvelles fonctions et à raffiner les fonctions
existantes de Cherry. Nous aimerions également que Cherry puisse s’interfacer avec
le logiciel Prim@kid de l’association prim@.
Il nous sera également possible de revoir l’apparence physique de Cherry en
fonction des contraintes matérielles ou de considérations esthétiques, puisque le
robot Poppy utilisé permet une modification libre du matériel.
Notre but final est de créer un robot capable d’interaction avec l’enfant, per-
mettant de réduire la sensation d’isolement et d’éviter à l’enfant une rupture avec
l’école, en vue d’une réinsertion sereine dans le milieu scolaire à sa sortie de l’hôpital.
6/9Projet Cherry
1.6 Planing prévisionnel
a
Nous prévoyons de lancer les travaux de développement à partir de janvier, et
de mettre en place un cadre propice au démarrage de ces travaux en décembre.
Cette décision est liée à notre cursus scolaire qui nous libérera davantage de temps
à partir de janvier pour nous lancer dans le développement en évitant de faire durer
une phase de storming liée au lancement des travaux concrets qui risque d’être
inévitable.
Les développements seront itératifs sur la base d’un backlog définit en décembre
avec Prim@. Les cas d’usage à implémenter seront priorisés en étroite collaboration
avec Mme Gauté pour nous assurer de leur plus-value. Nous prévoyons de faire deux
lots principaux pouvant être réalisés en environ 2 mois.
Cette organisation devrait nous permettre de tester en situation réelle grâce à
Prim@ notre premier lot de développement avant le rendu des dossiers.
Le second lot pourra alors être lancé et peut-être suffisamment avancé d’ici à la
remise des prix pour permettre une démonstration selon l’organisation prévue par
Sogeti.
1.7 Projections financières
Nous tenterons de limiter au maximum les investissements nécessaires, en pri-
vilégiant les partenariats plutôt que les achats. Ainsi le robot Poppy est mis à notre
disposition par ses concepteurs. En contrepartie, nous contribuerons au développement
de la communauté d’utilisateurs et mettrons certaines parties de notre code final à
disposition de celle-ci afin que d’autres innovateurs puissent s’appuyer dessus dans
leurs propres créations. Si d’autres nécessités matérielles se présentent (caméra,
composants, voir imprimante 3D) nous chercherons à emprunter aux associations
étudiantes de notre école afin de limiter les achats.
L’objectif de Cherry est de rationaliser notre projet auprès du grand public et
de potentiels clients investisseurs type CHU ou distributeurs de solutions E-Santé
auprès de CHU.
7/9Projet Cherry
Nous présentons donc un chiffrage estimé des efforts et investissements alloués
à ce projet selon 2 temps :
— Temps 0 : Création d’un prototype de rationalisation et fédération autour
du concept
— Temps 1 : Lancement de pilotes et généralisation auprès d’investisseurs
Temps 0 : Amorçage
Cette période s’étend de novembre à Mai. Le tableau ci-après représente l’en-
semble des investissements estimatifs recensés.
Nature investissement Total investissement Attendu ROI Coût
projet
Matthieu LAPEYRE - 6500e(pas de coûts Alimentation de la com- 0e
Prêt robot Poppy et pour l’accès au labo- munauté OpenSource
accès au laboratoire IN- ratoire) Poppy et retombées de
RIA communication autour
du projet
Mme GAUTE - Accès En estimant 1 ren- Démonstrateur per- 0e
plateforme Prim@Kid et contre de 2h toutes tinent en vue d’une
disponibilité personnelle les 2 semaines : 0,5j généralisation
pour le projet * 6 = 3j/h (soit en-
viron 1500e)
Sogeti - Coaching A raison de 0,5j/s Un projet Innovant de 0e
pour le coach : 0,5j région et des éléments de
* 4,5 * 6 = 13,5j/h communication
(soit environ 6500e)
ENSEIRB-MATMECA 0e, le projet s’inscrit Valeur pédagogique, ap- 0e
- Intégration projet au dans un module déjà proche de l’entreprena-
cursus scolaire existant riat
Équipe projet - 4 0e Création de valeur grâce 0e
étudiants travaillant à nos connaissances, ser-
d’arrachepied vice rendu
Totaux 14500e N\A 0e
Nous avons conscience que ce chiffrage reste très approximatif. Il indique toute-
fois que les investissements réalisés sont fait à titre gracieux grâce à des partenariats
ou les motivations et implications des acteurs en faveur de notre projet. Nous te-
nons donc ici à remercier les acteurs nous permettant de développer notre concept
durant les mois à venir.
Temps 1 : Démarrage
Cette période intervient juste après la remise des prix du Défi H, une fois les
résultats du jury connus. Quels que soient ces derniers, nous présentons par la suite
une estimation des investissements à réaliser sur l’année suivant i.e. de Juin 2015 à
Juin 2016. Nul besoin ici de représenter un tableau car de nombreuses hypothèses
seraient alors à poser. Toutefois, sous réserve que nous parvenions à convaincre et
rassembler autour de Cherry, nous présentons ici nos prévisions financières de façon
macroscopiques.
8/9Projet Cherry
— Investissements nécessaires à la communication : Après la participa-
tion au Défi H et les retombées nationales potentielles, les efforts de commu-
nication seront très certainement amoindris mais toutefois nécessaire pour
maintenir une certaine effervescence autour du projet.
Les investissements supplémentaires à fournir estimés seraient donc de : 50
ke.
— Investissements nécessaires à la création d’une start-up :
— Concernant les coûts humains : 4 ingénieurs temps plein durant 1 an, sur
la base d’une rémunération annuelle brute de 30ke : 4*30ke= 120ke
— Concernant les coûts juridiques : sans trop de référence, nous prévoyons
de provisionner 30ked’accompagnement juridique.
— Concernant les coûts commerciaux : Grâce à notre réseau, nous devrions
pouvoir absorber les coûts commerciaux de démarchage de CHU pour les
sites pilotes de notre projet. Donc 0e.
Total besoins d’investissement temps 1 : 200ke
Dans le cas où notre amorçage fonctionne, suite à la compétition nous lancerons
un processus de financement de 6 mois maximum au cours duquel nous préciserons
le Business Model de notre entreprise et la logique de financement. Au vu du pro-
jet présenté et selon l’adhésion rencontrée, nous nous orienterons vers des solutions
classiques ou de crowdfunding. Un mélange des deux peut être envisageable, sa-
chant que le projet présente un fort intérêt régional et pourrait s’inscrire dans des
stratégies de financements diverses d’intérêt région.
Merci pour l’attention portée à notre candidature.
9/9Vous pouvez aussi lire