Génération de code à partir de modèles UML-RT ciblant des plateformes Arduino
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Rapport de stage
Année universitaire 2020 - 2021
Laboratoire d’Informatique de Grenoble - VASCO
Génération de code à partir de modèles
UML-RT ciblant des plateformes
Arduino
Elian Loraux - 11 juin 2021
LIG : IUT :
Yves Ledru : Chef de VASCO Eric Fontenas : Responsable stage
Nicolas Hili : Tuteur de stage Sara Laget-Kamel : Tutrice IUT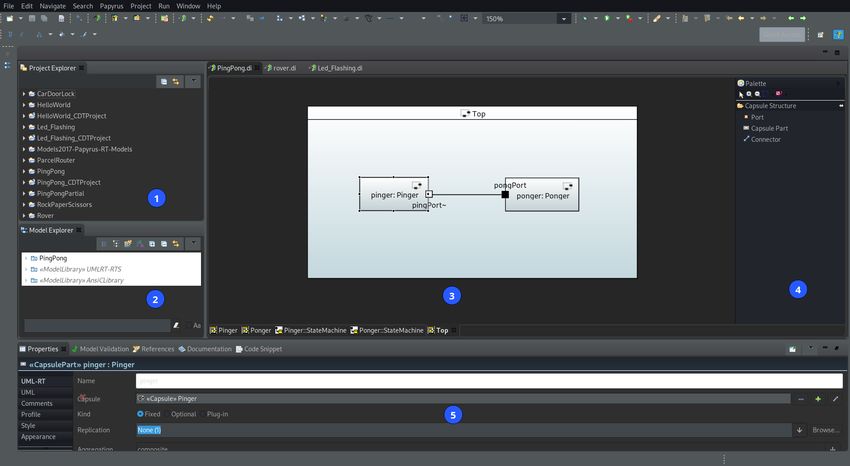
Déclaration de respect des droits d’auteur
Par la présente, je déclare être le seul auteur de ce rapport et assure qu’aucune autre ressource
que celles indiquées n’ont été utilisées pour la réalisation de ce travail. Tout emprunt (citation ou
référence) littéral ou non à des documents publiés ou inédits est référencé comme tel.
Je suis informé qu’en cas de flagrant délit de fraude, les sanctions prévues dans le règlement des
études en cas de fraude aux examens par application du décret 92-657 du 13 juillet 1992 peuvent
s’appliquer. Elles seront décidées par la commission disciplinaire de l’UGA.
À Saint Martin d’Hères, le 30 mai 2021.
Signature
Remerciements Je tiens à exprimer ma reconnaissance à mes tuteurs de stage, Nicolas Hili côté LIG et Sara Laget- Kamel côté IUT. Carole Pasini, Frédéric Gargaud et Gary Grange ont toute ma gratitude pour leurs conseils avisés et leurs recommandations. Je souhaite remercier également Laurent Chauvineau pour son aide apportée dans la mise en place de l’outil LATEX (outils de mise en forme PDF) dont je me suis servi pour rédiger ce rapport. Pour finir, je remercie le département informatique de l’IUT2 ainsi que le LIG pour leur formation et leurs enseignements.
Sommaire 1 Abstract 1 2 Résumé du rapport 2 3 Introduction 3 3.1 Laboratoire d’Informatique de Grenoble . . . . . . . . . . . . . . . . . . . . . . . 3 3.2 Sujet de stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.3 Plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 4 Modèle UML-RT et Papyrus-RT 6 4.1 Modèle UML-RT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.2 Papyrus-RT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 5 Réalisation 10 5.1 Modèle de test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 5.2 Bibliothèque UML-RT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 5.3 Compilation du programme principal . . . . . . . . . . . . . . . . . . . . . . . . . 14 5.4 Débogage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 6 Applications possibles 25 7 Conclusion 26 7.1 Applications réelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 7.2 Mon ressenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Glossaire 28 Bibliographie/Webographie 29 Annexes 30
1 | Abstract
Porting a UML-RT library on Arduino platform
Elian Loraux
Abstract : Nowadays, embedded systems are increasingly used, and they are found in almost all
informatic systems. Within the Grenoble computer science laboratory and in the context of a
research project on model execution in an embedded system, I had to port an UML-RT library
on Arduino platform. Arduino is a programmable prototyping board that tends to be
representative of the industrial standards. So, I needed to define UML-RT and its component. To
do so, I had to familiarize myself with the UML-RT language and its Papyrus-RT tool which can
generate C++ code to create testing models. The most important and hardest task was to
modify the UML-RT library so it could execute on Arduino. To succeed, I had to pass many
steps. I started by compiling the library with the library compile tool which consisted in
modifying the target. Then, I worked hard to link the library to the main program by trying
several different tools and technics. After testing several Makefiles (compiling scripts), I used the
command line interface Arduino tool which allowed me to fix bugs and to finish, I used the
Arduino IDE. The next step was to fix many bugs within the library following modifications to
compile the main program. After facing a hardware capacity restriction, I was able to test my
alterations and a long phase of currently unfinished debugging had started. To conclude, I will
present the potential practical applications and what is actually achievable.
Keywords : UML-RT, Arduino, LIG, embedded system.
12 | Résumé du rapport
Au sein du Laboratoire d’Informatique de Grenoble et dans le cadre d’un projet de recherche sur
l’exécution de modèle sur des systèmes embarqués, j’ai dû porter la bibliothèque UML-RT sur une
plateforme Arduino. Arduino est un type de carte de prototypage programmable qui tend à être
représentatif des cartes utilisées dans les systèmes embarqués. Il me fallait donc définir ce qu’est
UML-RT et ce qui gravite autour. Pour cela, j’ai pris en main le langage UML-RT ainsi que son
outil Papyrus-RT capable de générer du code C++ dans l’objectif de réaliser un modèle de test.
La tâche la plus importante et difficile à accomplir est de modifier la bibliothèque pour l’exécuter
sous Arduino. Pour arriver à cela, je suis passé par plusieurs étapes. J’ai commencé par compiler
la bibliothèque grâce à l’outil fourni en le modifiant pour coller à la plateforme. Ensuite, j’ai
beaucoup travaillé pour lier la bibliothèque au programme principal en essayant plusieurs outils et
techniques différents. Dans l’ordre, j’ai testé l’outil en ligne de commande Arduino, puis plusieurs
Makefiles (script de compilation) pour finir avec l’IDE Arduino après avoir résolu un bug grâce
aux techniques précédentes. Dans l’étape suivante, il a fallu résoudre beaucoup de problèmes liés
à la bibliothèque pour pouvoir compiler le programme principal. Après une limitation matérielle,
j’ai pu tester mes modifications et s’est ensuivi une longue phase de débogage à l’heure actuelle
inachevée. Pour conclure, je présenterai les applications possibles et ce qui est réellement réalisable
actuellement.
23 | Introduction
3.1 Laboratoire d’Informatique de Grenoble
Le Laboratoire d’informatique de Grenoble, aussi abrégé LIG, a été fondé le 1 janvier 2007 et est
actuellement dirigé par Noël DE PALMA, Sihem AMER YAHIA, Patrick REIGNIER - adjoint à
la direction - et Pascale POULET - assistante de Direction -. La recherche au LIG est mené sur
trois sites : le campus, Minatec et Montbonnot. Il est partenaire du CNRS (Centre National de la
Recherche Scientifique), le l’INRA (Institut National de la Recherche Agronomique), de Grenoble
INP (Institut National Polytechnique) et de l’UGA (Université Grenoble Alpes).
Le LIG rassemble près de cinq cents chercheurs, enseignants-chercheurs, doctorants et personnels
en support à la recherche comprenant plus de quarante-cinq nationalités. Les travaux au sein du
laboratoire sont répartis en cinq axes de recherche :
— Génie des Logiciels et des Systèmes d’Information ;
— Méthodes Formelles, Modèles et Langages ;
— Systèmes Intelligents pour les Données, les Connaissances et les Humains ;
— Systèmes Interactifs et Cognitifs ;
— Systèmes Répartis, Calcul Parallèle et Réseaux.
Chaque axe a son objectif et est composé de plusieurs équipes de recherche.
L’axe Génie des Logiciels et des Systèmes d’Information a pour objectif de proposer des
méthodes et des outils logiciels pour aider à gérer le cycle complet du développement d’un logiciel.
Il est organisé en trois équipes : CTRL-A, SIGMA et VASCO dont je fais partie.
Les équipes de l’axe Méthodes Formelles, Modèles et Langages étudient les concepts,
formalismes, techniques et outils permettant la description, l’analyse et le raisonnement sur des
systèmes complexes, afin d’obtenir des systèmes à la fois plus riches en fonctionnalités, plus
robustes, plus sûrs et plus efficaces. CAPP, CONVECS, SPADES et TYREX sont les quatre
équipes de l’axe.
L’axe Systèmes Intelligents pour les Données, les Connaissances et les Humains regroupe
six équipes autour d’une thématique commune, celle de la production de connaissances sémantiquement
riches à partir de données brutes, potentiellement massives, hétérogènes, imparfaites et/ou peu
structurées. APTIKAL, GETALP, MOEX, MRIM, SLIDE et STEAMER sont les équipes qui le
composent.
L’axe Systèmes Interactifs et Cognitifs étudient les interactions entre les Hommes et les
Machines, que ce soit grâce à des interfaces, des robots ou de l’Intelligence artificielle*. Il est
composé d’IIHM, MARVIN, METAH et M-PSI.
Les équipes de l’axe Systèmes Répartis, Calcul Parallèle et Réseaux travaillent sur le
traitement de données dans des proportions massives. Il est composé de CORSE, DATAMOVE,
DRAKKAR, ERODS et POLARIS.
33. Introduction Rapport de stage
Les recherches de l’équipe VASCO “VAlidation de Systèmes Composants et Objets logiciels“
portent sur la modélisation, la vérification et la validation des systèmes. Sous la responsabilité
d’Yves LEDRU, elle compte six enseignants-chercheurs, deux doctorants et douze stagiaires.
L’équipe VASCO a la conviction que les outils de génie logiciel doivent être articulés autour
des modèles. Son activité principale est la validation, tant des logiciels que des modèles, avec un
intérêt particulier pour la validation de la sécurité des systèmes informatiques.
3.2 Sujet de stage
Le sujet du stage est de générer du code à partir de modèles UML-RT ciblant des plateformes
Arduino* (carte de prototypage). L’objectif est de pouvoir utiliser des modèles pour contrôler des
système embarqués* (système électronique et informatique autonome). L’utilité d’Arduino* est de
proposer une carte programmable de prototypage pour des systèmes embarqués. Elle tend à être
représentative des cartes utilisées en industrie.
Pour porter le code généré à l’aide de Papyrus-RT plusieurs étapes sont à franchir :
— Me familiariser avec UML-RT et créer un modèle de test ;
— Compiler la bibliothèque ciblant Arduino* ;
— Porter le code principal sous Arduino* ;
— Tester le système avec plusieurs modèles.
Une fois ces objectifs atteints, selon le temps qu’il me reste, je peux réaliser plusieurs tâches comme
la mise au propre de la bibliothèque modifiée, l’exécution de modèle UML-RT pour un rover ou
pour un robot d’auto équilibrage contrôlé par Arduino*.
Mon stage entre dans le cadre du projet de recherche “in-Place DSL Execution for Embedded
Robotic Systems“ (iPEERS) porté par l’équipe VASCO et en collaboration avec l’université
Queen‘s au Canada. L’objectif est d’exécuter le modèle plutôt que de générer du code pour
un langage de programmation à partir dudit modèle. Le problème de générer du code à partir
du modèle est que deux langages n’ont quasiment jamais la même sémantique. Il faut donc un
générateur par langage sauf pour certains cas particuliers ce qui représente un coût de réalisation
et de maintien très élevé.
Deux approches sont possibles :
— l’une est de définir cette sémantique et de pouvoir exécuter des modèles sur des cibles
robotiques. Cependant, ce n’est pas aussi simple car les outils existants sont loin d’être
adaptés pour être exécutés sur des cartes embarquées*, d’où la nécessité de chercher une
solution pour des environnements plus légers ;
— l’autre approche consiste à mélanger les travaux de génération de code et d’exécution de
modèles pour être capable de construire automatiquement des générateurs de code. Cela
permettrait de supporter une grande partie des langages en réduisant les risques d’erreurs.
43. Introduction Rapport de stage
Trois stages s’articulent autour de ce projet. Ceux de Stéphane Humblot, Hugo Bantignies et le
mien.
Figure 3.1 – iPEERS - articulation des stages.
Mon stage est d’une durée de douze semaines, du 19 avril 2021 au 9 juillet 2021. Avec la période
sanitaire actuelle, je me rends au sein de l’IMAG (institut d’Informatique et Mathématiques
Appliquées de Grenoble) tous les matins et suis en télétravail tous les après-midi.
3.3 Plan
La présentation de mon travail va s’axer sur trois grandes parties. En premier lieu, je traiterai
les modèles UML-RT et Papyrus-RT, leurs applications, avantages et inconvénients. Ensuite,
j’aborderai la bibliothèque UML-RT et les modifications que j’ai effectuées pour la porter sous
Arduino*. Je finirai par le portage du code généré par Papyrus-RT sous Arduino* et les différentes
techniques utilisées.
54 | Modèle UML-RT et Papyrus-RT
4.1 Modèle UML-RT
4.1.1 Modèle
“The entire history of software engineering is about raising the level of abstraction“ 1 (Grady
Booch, l’un des fondateurs de l’UML). Ce qui signifie que depuis le toujours, l’ingénierie logicielle
charche à s’extraire le plus possible de l’environnement d’exécution. Cela se retrouve, aujourd’hui
encore, avec par exemple la création du C, pourtant apparu au debut des années 70,et majoritairement
utilisé pour les sytèmes d’exploitation. Le C viens “remplacer“ l’assembleur en s’extrayant du jeu
d’instruction spécifique à chaque processeur. Plus récemment, ce principe se répète avec l’explosion
des applications web comme google doc, next cloud et bien d’autres, utilisables via navigateur
internet, qui peuvent être lancées sur quasiment tous les appareils (ordinateur, smart phone,
tablette, montre connectée, etc.). On note aussi en ce moment une montée en puissance de ce qu’on
appelle le “no code“. C’est le principe de réaliser des automatisations, voire des applications, en
faisant de l’assemblage de blocs d’instruction(s) simple(s) (ex : “si... alors... sinon...“). On peut citer
Scratch, IFTTT, WIX ou même Apple Shortcuts qui sont des applis de “no code“ très répandues
et connues dans des domaines bien différents (jeux vidéos, sites web, automatisations, etc.).
Avant d’expliquer en quoi consiste les modèles UML-RT, il est nécessaire de définir ce qu’est un
modèle dans le milieu informatique : c’est une représentation schématique d’un projet ou d’un
élement de projet. Il a pour but l’abstraction, l’automatisation et l’analyse.
L’abstraction : le modèle permet de communiquer avec les équipes ou de véhiculer une information
plus simplement. L’expression “Une image vaut mille mots“ prend tout son sens ici.
L’automatisation : l’objectif est, à partir d’une modélisation (la plus souvent graphique ou mixte
graphique/code), de pouvoir générer un programme entier sans erreur. En effet, générer du code
évite de nombreuses erreurs qu’on pourrait faire en écrivant du code à la main et donc de gagner
du temps.
L’analyse : le fait d’avoir des schématisations abstraites permet d’analyser le projet. Nous pourrions
être capables de détecter ainsi avec certains types de modèles des interblocages, des boucles infinies
ou des pertes de messages. La modélisation permet aussi des analyses d’efficacité (Combien de
fois cette transition est-elle franchie ? Quel est le temps de réponse pour réaliser une fonction ?).
Un modèle a son utilité s’il remplit au moins l’un des trois points précédents.
La modélisation en début de projet est devenue quasiment obligatoire. Elle permet de définir à
l’avance les cas et solutions et ainsi maintenir une certaine cohérence tout au long de la réalisation
du projet. La modélisation dans son sens premier peut prendre n’importe quelle forme. Cependant
certaines normes se sont largement imposées comme l’UML et ses dérivés (SysML, UML-RT etc.).
1. L’histoire entière de l’ingénierie logiciel est d’augmenter le niveau d’abstraction
64. Modèle UML-RT et Papyrus-RT Rapport de stage
4.1.2 UML
L’UML (Unified Modeling Language) 2 est donc le langage de modélisation de plus répandu
aujourd’hui. Il a été créé en 1997, principalement issu de l’unification (d’où le unified d’UML)
des travaux de Grady Booch, James Rumbaugh et Ivar Jacobson. La version actuelle, UML 2.5,
propose quatorze types de diagrammes dont sept structurels et sept comportementaux. À titre
de comparaison, UML 1.3 comportait vingt-cinq types de diagrammes. L’UML est à présent un
standard adopté et édité par l’Object Management Group (OMG), consortium international créé
en 1989 dont le but, non-lucratif, est de standardiser et promouvoir la programmation orientée
objet (POO). Cependant, l’UML reste un langage générique et n’est pas exclusif à la POO. Parmi
les diagrammes principaux on retrouve :
Le diagramme de classe : presque indispensable pour la POO, il sert à schématiser une classe,
ses méthodes, attributs et relations avec les autres classes. En reprenant l’exemple d’une école,
on peut définir une classe mère Personne avec deux classes filles Professeur et Élève. Les deux
classes filles hériteront alors des attributs et fonctions de la classe mère.
Le diagramme de classe serait donc :
Figure 4.1 – Diagramme de classe - Professeur et élève.
Le diagramme de machine à états : il permet de mettre en évidence différents états du système
et les transitions entre ceux-ci. On peut imaginer qu’un professeur a deux états. L’un “En cours“
qui représente les temps où il enseigne devant ses élèves et l’autre “En pause“ qui représente les
temps d’intercours. Le diagramme de machine à état du professeur donne donc :
Figure 4.2 – Diagramme de machine à états - État du professeur.
Le diagramme de machine à états est très important pour UML-RT et générer du code via Papyrus-
rt également.
2. Langage de modélisation unifié
74. Modèle UML-RT et Papyrus-RT Rapport de stage
4.1.3 UML-RT
L’UML-RT (UML-Real Time) 3 est une variante de l’UML. L’objectif est de créer des systèmes
réactifs qui interagissent avec leur environnement. À sa base, un modèle UML-RT est constitué de
capsules. Chacune d’elles contient une machine à états utilisée pour représenter son comportement.
Les transitions entre les états sont déclenchées par des messages reçus sur les ports de la capsule.
Prenons l’exemple du premier tutoriel de Papyrus-RT réalisant un ping-pong entre deux capsules.
Le but est de créer un dialogue entre le “Pinger“ et le “Ponger“. Le résultat de l’exécution du
code généré se trouve en annexe, figure 1. Pour cela, nous avons donc deux capsules, “Pinger“ et
“Ponger“. Le Pinger va envoyer un “ping“ au Ponger qui, une fois le “ping“ reçu, va renvoyer un
“pong“ au Pinger, et ainsi de suite une dizaine de fois.
Ici, chaque capsule n’a qu’un seul état, un état “playing“, lorsque l’une d’entre elle, par exemple
le Ponger, reçoit un ping, il va répondre par un pong puis se remettre en état “playing“.
Figure 4.3 – Capsule Pinger et Ponger.
Figure 4.4 – Machine à états du Pinger.
On peut résumer le fonctionnement du ping-pong avec le diagramme de sequence suivant :
Figure 4.5 – Diagramme de séquence - Ping-pong.
3. UML en temps réel
84. Modèle UML-RT et Papyrus-RT Rapport de stage
4.2 Papyrus-RT
Papyrus-RT est un outil de modélisation UML-RT basé sur Papyrus/Eclipse spécifique à l’UML-
RT. Il est développé principalement par Zeligsoft de 2014 à juin 2017 pour sa dernière version.
Papyrus-RT a pour objectif d’être une alternative opensource 4 à RSARTE qui est aussi un outil de
modélisation UML-RT, mais propriétaire à IBM. Le projet était soutenu par l’université Queen’s,
Ericsson et le CEA List. Il n’est actuellement plus développé principalement à cause de l’arrêt
des financements. Tout son interêt est de pouvoir générer du code C++ grâce aux modèles. Un
programme généré par Papyrus-RT repose sur une partie dynamique liée aux modèles et une
partie statique définie par une bibliothèque. La partie dynamique appelle la bibliothèque pour
fonctionner convenablement. Avant que le projet ne soit stoppé, Ericsson envisageait d’utiliser
Papyrus-RT et UML-RT pour ses systèmes de télécommunication et notamment pour la 5G.
L’interface de Papyrus-RT est simple à prendre en main sans être pour autant avare de fonctionnalités.
Figure 4.6 – Interface de Papyrus-RT.
[1] Correspond à l’explorateur de projet, ce menu permet de naviguer aisément entre les différents
projets.
[2] Permet de sélectionner les différents éléments du projet. Il permet de voir et d’éditer les capsules,
protocoles et autres, mais aussi de voir l’arborescence. On peut donc choisir une machine à états
dans une capsule.
[3] L’espace principal permet de visualiser l’élément sélectionné et de l’éditer.
[4] La palette est là où l’on peut ajouter un port, une connexion ou une capsule à l’élément dans
l’espace principal de travail [3].
[5] C’est là où l’on règle les propriétés de l’élément sélectionné. Le menu est spécifique à chaque
type d’élément.
4. Source libre (le code source est en libre acces).
95 | Réalisation
5.1 Modèle de test
En tout premier lieu, j’ai dû me familiariser avec UML-RT et Papyrus-RT. Pour cela j’ai réalisé
le premier tutoriel de Papyrus-RT sur le ping-pong expliqué plus haut.
L’objectif de mon travail est de réussir à porter le code généré par Papyrrus-RT pour Arduino*.
Pour cela il me faut un système de test. J’ai choisi d’allumer une led avec un bouton poussoir. Le
cas est intéressant car je dois gérer à la fois une entrée (le bouton) et une sortie (la led). Je me
suis donc lancé dans la réalisation d’un modèle UML-RT.
Pour gérer mon système, j’ai décidé de créer deux capsules. Une de contrôle qui va détecter l’appui
de bouton ou non et une d’interactions qui va s’occuper de l’allumage de la led. Cela me permet
de contrôler plus facilement à la fois l’entrée et la sortie.
Figure 5.1 – Capsule pour le fonctionnement de la led.
Figure 5.2 – Machine à états de “controller“. Figure 5.3 – Machine à états de “interact“.
105. Réalisation Rapport de stage
Le “controller“ va lire l’entrée du bouton sur la pin 3, si le bouton est enfoncé, la fonction turnOn()
de “interact“ est appelée, si le bouton est relâché c’est la fonction turnOff() qui est appelée.
1 if ( digitalRead (3) == HIGH ) {
2 OnOffPortCtrl . TurnOn () . send () ;
3 }
4 else {
5 OnOffPortCtrl . TurnOff () . send () ;
6 }
Programme 5.1 – fonction - CheakButton
En fonction de l’état du bouton, on passe l’état de la led à “HIGH“ ou “LOW“, s’entend allumé
ou éteint.
1 digitalWrite (2 , HIGH ) ;
2 OnOffPort . CheakButton () . send () ;
Programme 5.2 – fonction - TurnOn
1 digitalWrite (2 , LOW ) ;
2 OnOffPort . CheakButton () . send () ;
Programme 5.3 – fonction - TurnOff
115. Réalisation Rapport de stage
5.2 Bibliothèque UML-RT
La génération de code par Papyrus-RT s’appuie donc sur la bibliothèque UML-RT. La première
chose que j’ai essayée est de l’inclure via l’IDE 1 Arduino*. J’ai donc pris les fichiers d’en-tête
et de corps pour les mettre dans le répertoire de bibliothèque Arduino*. Cependant, lors de la
compilation, des erreurs de type “référence indéfinie“ ont été levées (que ce soit via le dossier de
bibliothèque ou via le fichier “local“ en donnant le chemin des fichiers). Une référence indéfinie
apparaît lorsque, durant le processus d’édition de lien, la fonction n’est pas trouvée. Cela vient
généralement soit du fait qu’une fonction est déclarée, mais non définie, soit du fait qu’il y a un
problème avec la commande d’édition de lien. Les fonctions en question étant bien déclarées et
définies, j’ai donc décidé d’essayer de lier manuellement la bibliothèque au programme principal.
Pour cela, il me fallait la recompiler pour AVR-8bit.
La bibliothèque est prévue pour tourner sur un système d’exploitation avec toutes les fonctionnalités
qu’on lui connaît : Thread 2 (permet de lancer simultanément plusieurs tâches), Mutex (protection
de la concurrence des thread), signaux (forme de communication entre processus), sont bien
spécifiques à l’OS 3 ce qui veut dire indisponibles sur des plateformes qui en sont dépourvues
comme Arduino*. Un grand ménage s’est dont imposé. Le cœur de la bibliothèque est axé autour
de trois dossiers, les en-têtes (.hh), les corps (.cc) et les codes spécifiques à l’OS disponibles en
deux versions, une pour Linux et une pour Windows. Les codes spécifiques à l’OS sont des corps
des classes gérant Thread, Mutex et signaux. La première étape a donc été de modifier le Makefile
fourni pour s’adapter à Arduino*. Pour cela, j’ai dû changer le compilateur, passant de g++ à
avr-g++ et le support cible passant de Linux à Arduino*. Le support cible permet au Makefile de
savoir quel OS il doit utiliser donc quel code relatif à celui-ci.
J’ai dû rajouter un fichier “build tools“ 4 spécifique à avr-gcc qui vient définir certaines variables
comme le compilateur, l’éditeur de liens ou l’archiveur. Le fichier de “build tool“ est en annexe
page 1, programme 1.
Les premières erreurs que auxquelles j’ai été confronté sont des “overflow“ 5 relatifs au processeur
utilisé. Un ordinateur actuel a un processeur 64 bit (ou 32 bit pour les ordinateurs vraiment
anciens) alors que les Arduino* utilisent des architectures de processeur 8 bit. Un bit est la plus
petite information possible en informatique. Souvent représenté sous la forme de 0 ou 1, il indique
un état vrai ou faux. En regroupant les bits par paquet, nous pouvons encoder des informations
plus riches. Pour prendre un exemple, je cherche à avoir un “long“ (un entier codé sur 4 octets
soit d’une valeur max de plus de 4 milliards) tel que “long SECONDS_PER_DAY = (60 * 60
* 24)“. 60 et 24 sont considérés implicitement comme un “int“ 6 or, en 8 bit, un “int“ est codé
sur deux octet, soit une valeur maximum de 65 535. Lors de la compilation, le système va faire
le calcul en “int“ avant de le convertir en “long“. Or, le résultat de la multiplication dépasse la
valeur maximale d’un “int“. Pour résoudre ce problème, soit j’entre directement le résultat de la
multiplication, soit j’explicite le type “long“ des 60 et du 24 en faisant “60L * 60L * 24L“.
1. Integrated Development Environment (Environnement de développement)
2. Fils d’exécution
3. Operating système (Système d’exploitation)
4. outils de constructions.
5. Débordement (quand l’on va au-delà de la valeur maximale codable)
6. Integer (Entier)
125. Réalisation Rapport de stage
Ensuite, j’ai eu des problèmes de bibliothèques standards (appelées std). Certaines std sont
manquantes sous Arduino* et d’autres sont légèrement différentes. C’est le cas de la std que
j’ai dû remplacer par la bibliothèque spécifique à Arduino*. J’ai aussi enlevé toutes les inclusions
vers le code spécifique à l’OS et tout ce qui s’ensuit (variables, fonctions, etc.).
Après ces modifications, j’ai pu compiler la bibliothèque pour AVR 8-bit ce qui m’a donné un .a
(fichier compilé de la bibliothèque à relier au code principal). C’est donc mon point suivant.
135. Réalisation Rapport de stage
5.3 Compilation du programme principal
Après avoir compilé la bibliothèque, il me faut la lier à mon programme principal. Pour cela, j’ai
deux solutions : l’outil de compilation Arduino* (arduino-builder) ou faire un Makefile avec toutes
les commandes de compilation. J’ai commencé par utiliser arduino-builder utilisable en CLI 7 . Pour
me servir de “arduino-builder“, j’ai réalisé un petit Makefile qui me permet d’inclure des variables.
1 ARDUINO =/ usr / share / arduino
2 CART = archlinux - arduino : avr : uno
3 UML_ARDUINO =/ home / breizh / Documents / Cours / stage / Sujet / umlrt - arduino
4
5 T o p Main Ardu in o B u i l d e r :
6 arduino - builder - compile - verbose - hardware $ ( ARDUINO ) / hardware - tools
$ ( ARDUINO ) / tools - builder - libraries $ ( UML_ARDUINO ) - fqbn = $ ( CART ) -
build - path build - warnings default TopMain . ino
Programme 5.4 – Makefile - arduino-builder
Après avoir essayé de donner à l’option “-libraries“ le chemin du répertoire de la bibliothèque, de
la bibliothèque compilée (.a) et du répertoire de la bibliothèque compilée, le résultat est similaire.
Dans tous les cas il y a des références indéfinies vers les fonctions de la bibliothèque.
J’ai donc changé de stratégie et commencé un Makefile pour pouvoir compiler le programme
principal et surtout le relier à la bibliothèque.
Mon premier Makefile était assez simple. Il n’utilisait aucune règle ni paramètre par défaut et je
n’utilisais pas la bonne option pour lier ma bibliothèque. Associées à l’édition de lien, il existe
trois options :
— -I“chemin“ spécifie un répertoire pour les “includes“ 8 ;
— -L“chemin“ spécifie un répertoire pour les bibliothèques (.a) ;
— -l“nom de la bibliothèque“ spécifie une bibliothèque à lier au programme.
Avec l’option -l, si le nom de fichier contient“lib“, ce préfixe est ignorée par le Makefile. Il faut
donc enlever “lib“ quand on utilise -l. Dans mon cas le ficher compilé de la bibliothèque s’appelle
“librts“ donc mon option -l serait “-lrts“.
J’en suis donc arrivé au Makefile suivant :
7. Commande Line Interface (interface en ligne de commande)
8. inclusions
145. Réalisation Rapport de stage
1 CXX = avr - g ++
2
3 CXXFLAGS = - Wall - Wextra
4 CXXFLAGS += - std = c ++17
5
6
7 # ------ les bibliotheques exterieures
8
9 AVR_ARDUINO =/ usr / share / arduino / hardware / archlinux - arduino / avr
10
11 CPPFLAGS += - I$ ( AVR_ARDUINO ) / cores / arduino
12 CPPFLAGS += - I$ ( AVR_ARDUINO ) / variants / standard
13
14 UML_ARDUINO = / home / breizh / Documents / Cours / stage / Sujet / uml - rt - port - for -
arduino
15
16 CPPFLAGS += - I$ ( UML_ARDUINO ) / umlrt - arduino_lib / include
17 LDLIBS += - L$ ( UML_ARDUINO ) / umlrt - arduino_lib / lib
18 LDLIBS += - lrts
19
20 # ------- structure du projet - - - - - - - - - - - - - - - - - - - - - - - - - - -
21
22 MAIN = TopMain . cc
23 SOURCES = OnOff . cc interact . cc Controller . cc Top . cc TopControllers . cc
24
25 OBJ = $ ( SOURCES :. cc =. o )
26 OBJ += $ ( MAIN :. cc =. o )
27
28 # -------- dependances - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
29
30 all : TopMain
31
32 TopMain : $ ( OBJ )
33 $ ( LINK . cc ) -o $@ $ ^
34
35 TopMain . o : TopMain . cc TopControllers . hh
36 TopControllers . o : TopControllers . cc Top . hh Controller . hh interact . hh
37 Top . o : Top . cc Controller . hh interact . hh
38 Controller . o : Controller . cc OnOff . hh
39 interact . o : interact . cc OnOff . hh
40 OnOff . o : OnOff . cc
41
42 # ---- divers - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
43 clean :
44 $ ( RM ) *. o
Programme 5.5 – Makefile - TopMain
155. Réalisation Rapport de stage
J’utilise beaucoup de variables et règles par défaut du Makefile. On peut voir ces variables et
règles grâce à la commande “make -p“. Voici les principales variables et règles utilisées dans mon
Makefile :
1 LINK . cc = $ ( CXX ) $ ( CXXFLAGS ) $ ( CPPFLAGS ) $ ( LDFLAGS ) $ ( TARGET_ARCH )
2
3 %. o : \%. cc
4 $ ( COMPILE . cc ) $ ( OUTPUT_OPTION ) $ <
5
6 COMPILE . cc = $ ( CXX ) $ ( CXXFLAGS ) $ ( CPPFLAGS ) $ ( TARGET_ARCH ) -c
7
8 $@ # cible
9
10 $^ # liste des dependances
11
12 $< # premiere dependance
Programme 5.6 – Makefile - Options par défaut
Cependant, là aussi, des références vers la bibliothèque UML-RT sont présentes sur des fonctions
pourtant bien définies. Après avoir avancé à tâtons sans grand résultat, j’ai décidé de faire preuve
d’un peu plus de méthodologie.
5.3.1 Retour à un cas simple
Pour simplifier la résolution de bugs sur la bibliothèque UML-RT, j’ai réduit mon problème à un
cas simple en créant une petite bibliothèque de gestion de led. L’objectif est d’être dans la même
configuration que mon programme généré par Papyrus-RT et la bibliothèque UML-RT avec une
bibliothèque bien plus simple et moins broussailleuse en .a et un programme principal dépendant
de celle-ci. J’ai donc créé une classe Led qui va gérer sa déclaration sous Arduino* et la faire
clignoter toutes les X secondes. La classe est donc telle que :
Figure 5.4 – Diagramme de classe de “Led“.
165. Réalisation Rapport de stage
1 # include " Led . h "
2
3 Led :: Led ( int pin ) {
4 m_pin = pin ;
5 pinMode ( pin , OUTPUT ) ;
6 }
7
8 void Led :: writeLed ( int state ) {
9 digitalWrite ( getPin () , state ) ;
10 }
11
12 void Led :: flash ( int time ) {
13 this - > writeLed ( HIGH ) ;
14 delay ( time ) ;
15 this - > writeLed ( LOW ) ;
16 delay ( time ) ;
17 }
Programme 5.7 – Classe Led.
Le constructeur déclare la led branchée sur le GPIO 9 “pin“ en sortie. La fonction “flash()“ allume
la led X temps puis l’éteint pendant la même durée.
Après avoir programmé la classe, je l’ai donc compilée sous forme de bibliothèque en .a. Étant
donné qu’elle appelle des fonctions Arduino*, j’ai dû lier la bibliothèque Arduino*. Pour simplifier,
j’ai réalisé ce Makefile :
1 CXX = avr - g ++
2
3 CXXFLAGS = - Wall - Wextra
4 CXXFLAGS += - std = c ++17
5
6 # --------- les bibliotheques exterieurs
7 AVR_ARDUINO =/ usr / share / arduino / hardware / archlinux - arduino / avr
8
9 CPPFLAGS += - I$ ( AVR_ARDUINO ) / cores / arduino
10 CPPFLAGS += - I$ ( AVR_ARDUINO ) / variants / standard
11
12 # ------ compilation
13 all : libLed . a
14
15 libLed . a : Led . o
16 ar rcs $@ $ <
17
18 Led . o : Led . cpp
19 $ ( CXX ) -c $ < -o $@ $ ( CPPFLAGS )
20
21 clean :
22 $ ( RM ) *. o
Programme 5.8 – Makefile - bibliothèque Led
9. General Purpose Input/Output (Entrée-sortie à usage généra)
175. Réalisation Rapport de stage
J’ai donc programmé un code principal très simple qui va construire un objet Led sur la pin 2
donc déclarer une sortie en GPIO 2. Ensuite, il va boucler sur la fonction “flash()“ qui va allumer
la led une seconde puis l’éteindre autant de temps. cela a alors pour effet de faire clignoter la Led.
1 # include < Led .h >
2
3 void setup () {}
4
5 Led led (2) ;
6
7 void loop () {
8 led . flash (1000) ;
9 }
Programme 5.9 – Programme principal .
À ce stade, je suis dans le même cas de figure qu’avec la bibliothèque UML-RT. Un programme
principal qui appelle une bibliothèque externe en .a. Je reprends donc mon Makefile pour pouvoir
le compiler en reliant la bibliothèque “Led“. Alors, je n’ai plus de référence indéfinie vers la
bibliothèque que j’ai créée, mais j’en ai vers les fonctions Arduino*. J’apprends alors que l’IDE
Arduino*, à la première compilation, commence par compiler sa bibliothèque en statique dans un
répertoire temporaire. Je décide donc, dans le but de tester, de copier cette bibliothèque statique
dans le même répertoire que ma bibliothèque. Après tout cela, j’obtiens enfin un exécutable grâce
au Makefile suivant :
185. Réalisation Rapport de stage
1 CXX = avr - g ++
2
3 CXXFLAGS = - Wall - Wextra
4 CXXFLAGS += - std = c ++17
5
6 # --------- les bibliotheques exterieurs
7
8 AVR_ARDUINO =/ usr / share / arduino / hardware / archlinux - arduino / avr
9
10 CPPFLAGS += - I$ ( AVR_ARDUINO ) / cores / arduino
11 CPPFLAGS += - I$ ( AVR_ARDUINO ) / variants / standard
12
13 LED_ARDUINO = / home / breizh / Documents / Cours / stage / Sujet / simplecase / lib
14
15 CPPFLAGS += - I$ ( LED_ARDUINO )
16 LDLIBS += - L$ ( LED_ARDUINO )
17 LDLIBS += - lLed
18 LDLIBS += - lcore
19
20 CXXFLAGS += - fpermissive -fno - exceptions - ffunction - sections - fdata -
sections -fno - threadsafe - statics -Wno - error = narrowing - MMD - flto -
mmcu = atmega328p
21 LDFLAGS += - flto - fuse - linker - plugin -Wl , - - gc - sections - mmcu = atmega328p
22
23 # ------- structure du projet - - - - - - - - - - - - - - - - - - - - - - - - - - -
24
25 MAIN = simplecase . cpp
26 OBJ += $ ( MAIN :. cpp =. o )
27
28 # -------- dependances - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
29
30 all : simplecase
31
32 simplecase : $ ( OBJ )
33 $ ( LINK . cc ) -o $@ $ ^ $ ( LDLIBS )
34
35 simplecase . o : simplecase . cpp
36
37 # ---- divers - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
38 clean :
39 $ ( RM ) *. o *. d
Programme 5.10 – Makefile - cas simple
Obtenir un exécutable est une bonne avancée, mais il faut maintenant le téléverser sur la carte
Arduino*. Par curiosité, je retente d’inclure la bibliothèque via l’IDE et, cette fois, le programme
compile puis est téléversé sur la carte. Je commence donc à chercher les différences notables
entre la bibliothèque de mon cas simple (Led) et la bibliothèque UML-RT. L’une d’entre elles est
l’extension de fichier : la bibliothèque UML-RT utilise .cc et .hh tandis que la mienne utilise .cpp
et .h. Sachant qu’en C++ plusieurs extensions sont acceptées comme le .cc, .cpp ou .cxx, de même
pour les .hh, .hpp, .h et .hxx, sans grande conviction, j’ai changé les extensions de fichiers de la
195. Réalisation Rapport de stage
bibliothèque de mon cas simple en .cc et .hh pour coller au plus près de la bibliothèque UML-RT.
Je réessaie de compiler (étant sûr et certain que cela ne vient ni du programme, ni des commandes
de compilation) et cette fois, des références indéfinies vers ma bibliothèque (Led) apparaissent.
J’en conclus donc que les références indéfinies viennent des extensions de fichiers.
5.3.2 Programme principal
Suite à mon test, je change toutes les extensions de fichiers par .h et .cpp ainsi que toutes les
inclusions de tous les fichiers de la bibliothèque UML-RT pour pouvoir vérifier que les références
indéfinies viennent bien de là. Je repasse par l’IDE Arduino* pour pouvoir tester l’inclusion UML-
RT aux bibliothèques Arduino* et la plupart de mes références indéfinies disparaissent. Il reste
cependant un certain nombre d’erreurs liées aux modifications que j’ai apportées à la bibliothèque.
Pour des soucis de simplicité et pour éviter d’autres problèmes liés à la compilation, j’ai décidé de
continuer avec l’IDE Arduino* plutôt qu’avec des Makefiles. De plus, cela me permettra de créer
une bibliothèque facilement intégrable via l’IDE.
Certaines erreurs liées aux Thread, Mutex et à ce qui était dépendant d’un système d’exploitation
ne sont pas apparues lors de la compilation de la bibliothèque en .a via le Makefile. Pour remédier
à cela, j’ai commencé par mettre les fonctions du fichier d’en-tête des Mutex en commentaires
(pour qu’elles ne soient pas exécutées) pour voir où ces fonctions étaient appelées. Après, il m’a
suffi de tout retirer car le principe d’un Mutex est de protéger certaines parties du programme de
la concurrence des threads. Arduino* n’ayant qu’un seul thread, il n’y a donc pas de concurrence
et pas lieu de garder des protections.
Ensuite j’ai dû m’occuper des threads. L’une des premières choses que le programme principal fait
est de lancer un thread qui va venir exécuter le code généré à partir du modèle. J’ai dû contourner
la création du thread en gardant l’exécution du code généré. Ce fut un peu plus laborieux que prévu
car dans la bibliothèque UML-RT c’est la std “pthread“ qui est utilisée plutôt que simplement la
std “thread“ dont j’ai appris à me servir. L’idée est d’appeler la fonction exécutée par le “thread“
sans créer le “thread“. J’ai aussi dû modifier certaines conditions vérifiant quel thread exécutait la
condition. L’avantage est que sous Arduino*, la question des threads est binaire étant donné qu’il
n’y en a qu’un seul. Il n’y a donc plus besoin de vérifier si c’est le "bon" thread.
Un autre point à régler apparaît au niveau du lancement du programme principal. Un programme
classique C ou C++ exécute la fonction “main()“ qui retourne un entier et prend optionnellement
deux arguments, argc et argv. Argv est un tableau de chaînes de caractères qui équivaut aux
arguments donnés à l’exécution du programme (avec comme première valeur le nom du programme).
Argc correspond au nombre d’éléments dans argv. Cependant, en Arduino* il y a deux fonctions
de ce type : “setup()“ et “loop()“. “setup()“ sert à la déclaration des éléments sur les GPIO et
“loop()“ sert de “main()“. Cependant, loop() et main() n’ont pas le même comportement. Comme
son nom l’indique, loop() est une boucle infinie. Ce qui n’est pas le cas de main() qui, lui, ne va
s’exécuter qu’une seule fois. J’ai donc dans un premier temps simplement remplacé main() par
loop() en rajoutant la fonction setup() vide. J’ai aussi enlevé les retours dans la fonction main()
car loop() ne retourne rien (étant donné que le retour de la fonction main() sert à savoir comment
s’est passée l’exécution, elle n’est pas nécessaire sur un système qui tourne en continu).
205. Réalisation Rapport de stage
5.3.3 Type de carte
Après avoir résolu la majorité des soucis liés à la bibliothèque, un problème d’un autre type est
survenu. Pour coller le plus possible à l’industrie, nous avions choisi la carte de type Arduino* la
plus courante à savoir une Arduino Uno. Le problème des cartes embarquées* est que les ressources
sont souvent très limitées et dans notre cas, on dépasse considérablement la capacité de la carte.
En terme d’espace de stockage, le code principal et la bibliothèque prennent 2705% de la mémoire
disponible. Pour régler ce souci mon tuteurs de stage et moi avions trois possibilités : soit optimiser
énormément le programme et notamment la bibliothèque, soit changer de carte, soit un mélange
des deux.
Voici un comparatif de plusieurs cartes possibles :
Arduino Uno Arduino Mega NodeMcu 1.0 NodeMcu-32
Microcontrôleur ATmega2560 ATmega2560 ESP8266 ESP32
Tension de fonctionnement 5V 5V 3.3 V 3.3 V
Nombre de GPIO Digitale 6 54 13 16
Nombre de GPIO Analogique 6 16 1 16
mémoire flash 32 Ko 256 Ko 4 Mo 4 Mo
mémoire Ram 2 Ko 8 Ko 128 Ko 512 Ko
Vitesse de processeur 16MHz 16 Mhz 80 MHz 160 Mhz
Le programme pur utilise 24990 octets et les variables globales utilisent 55405 octets soit au total
80395 octets. Pour n’importe quel type de carte, il y a une partie réservée pour le programme
principal et une pour les variables. Ici c’est l’espace alloué aux variables qui pose problème.
Faire de l’optimisation sur la bibliothèque et sur le programme principal peut être très chronophage
car cela implique soit de reprogrammer la bibliothèque de zéro en utilisant le moins de variables
possibles, soit de reprendre chaque élément un par un pour le réduire au minium. Cependant
l’optimisation aurait quand même l’avantage de supporter un plus grand nombre de cartes, ce qui,
par extension, est plus représentatif du monde de l’industrie. L’autre possibilité est simplement
de changer de carte pour en utiliser une avec plus d’espace de stockage. Pour pouvoir avoir une
preuve du concept avant de se lancer dans une éventuelle optimisation et par souci de gain de
temps, nous avons décidé de changer de carte.
— Pour Arduino Uno, la mémoire flash (espace de stockage) maximum est de 2048 octets ;
— Pour l’Arduino Mega elle est de 8192 octets ;
— Pour la nodeMCU 1.0 elle est fixé à 81920 octets ;
— Pour la nodeMCU-32 elle est aussi de 81920 octets.
Les deux nodeMCU feraient alors l’affaire étant donné leur mémoire flash conséquente. Cette
mémoire est bien plus grande du fait que ces cartes ESP sont équipées d’un module WI-FI
intégré et peuvent donc stocker un petit serveur web par exemple. Ayant une nodeMCU 1.0 à
disposition, je teste le programme avec celle-ci. Les bibliothèques ESP8266 contenant déjà une
structure “timeval“ identique à celle de la bibliothèque UML-RT, j’ai dû l’enlever. Cependant,
cette fois-ci, ce n’est plus la mémoire flash qui pose problème mais la mémoire RAM. Il m’a donc
fallu utiliser la nodeMCU-32 qui a plus de mémoire RAM. J’ai dû installer dans l’IDE les modules
spécifiques à l’ESP32 non intégrés par défaut pour pouvoir compiler pour ce type de carte. ESP32
215. Réalisation Rapport de stage
n’a pas de “timeval“ par défaut donc je l’ai remis. Mon programme principal compile sans erreur
pour la nodeMCU-32. N’ayant pas cette carte à disposition, nous avons décidé d’en commander
une pour tester. L’avantage des nodeMCU est la facilité de propotypage. Elle se connecte par
micro-USB avec des pins utilisables sans soudure.
En attendant de recevoir la carte en question, j’ai décidé de mettre au propre la bibliothèque pour
qu’elle soit facilement intégrable par l’IDE Arduino.
5.3.4 Bibliothèque UML-RT pour Arduino
Rendre la bibliothèque facilement intégrable par l’IDE Arduino permettra à d’autres stagiaires
ou chercheurs d’utiliser mon travail facilement. D’autant plus que certaines mises à jour de
l’IDE peuvent rendre certains programmes instables. De plus avec l’arrivée de l’IDE 2.0, il est
important d’avoir une bibliothèque modifiable aussi simplement que possible pour pouvoir la
déboguer efficacement le cas échéant. Pour cela, plusieurs choses sont à faire :
— Créer un ficher de propriétés de la bibliothèque. Les bibliothèques Arduino peuvent contenir
un fichier de propriétés qui indique l’auteur, la version et un certain nombre d’informations
salutaires pour l’utilisateur. N’ayant pas encore pu tester la bibliothèque sur une carte,
celle-ci est donc en version 0.1 (phase de test du logiciel). J’en profite pour mettre le lien
du gitlab sur lequel sont hebergés les modifications et documents concernant le port de la
bibliothèque sous Arduino. Le fichier de propriétés est donc comme suit :
1 name = UML - RT
2 version =0.1
3 author = Zeligsoft , Elian Loraux
4 maintainer =
5 sentence = Library for UML - RT .
6 paragraph = Library for generated code by Papyrus - RT with UML - RT .
7 category = Device controle
8 url = https :// gricad - gitlab . univ - grenoble - alpes . fr / hilin / uml - rt - port -
for - arduino
9 architectures =*
Programme 5.11 – library.properties
Un autre avantage de créer ce fichier est qu’il est lu par l’IDE. Il permet d’afficher directement
dans l’IDE le nom, le numéro de version et d’autres informations de ce type.
— Rajouter un readme 10 qui permet d’expliquer plus en détails les fonctions de la bibliothèque
et tous les autres éléments qui peuvent avoir de l’importance comme le problème lié à
l’espace de stockage sur les cartes.
J’en profite aussi pour mettre au propre le gitlab en intégrant le bibliothèque UML-RT sans et
avec les modifications ainsi que le programme généré grâce à mon modèle de test.
10. lis moi
225. Réalisation Rapport de stage
5.4 Débogage
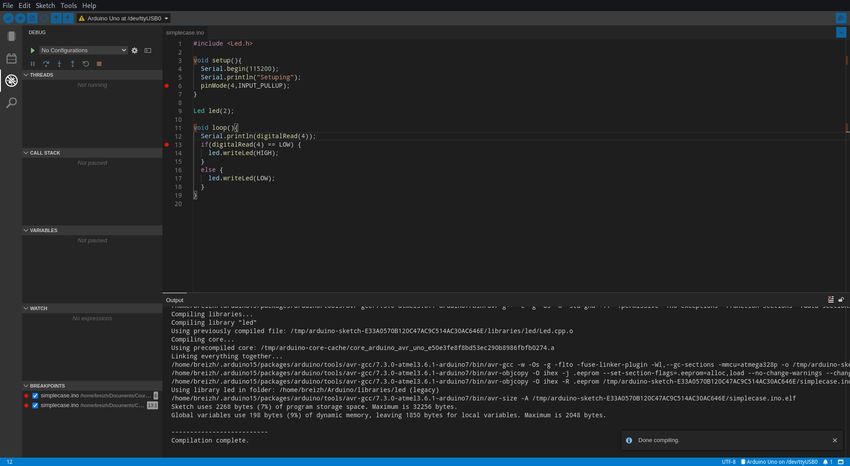
J’ai pu réceptionner la carte nodeMCU-32 le 7 juin et donc tester le programme sur la carte. C’est
la dernière ligne droite de la transition vers les cartes type Arduino*. Sans grande surprise, des
erreurs sont survenues. Pour déboguer un gros projet, habituellement, on utilise un débogueur*
(outils de débogage). L’IDE de base d’Arduino* ne proposant pas de débogueur*, je cherche une
alternative. L’une des solutions est l’IDE Arduino 2.0. Un nouvel IDE Arduino est en cours de
developpement et actuellement en beta test. L’IDE est bien plus moderne avec des fonctions plus
avancées comme l’autocomplétion. Voici un petit comparatif :
Figure 5.5 – IDE Arduino 1.8.
Figure 5.6 – IDE Arduino 2.0 Beta.
23Vous pouvez aussi lire