Guide technique Toolkit 2015 - Modèles 'C' et 'S' 2015 - Caahmro
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Version 1
Guide technique Toolkit 2015
Modèles ‘C’ et ‘S’
2015
Robomow Toolkit 2015
Ce guide technique décrit en précsion le Toolkit Robomow 2015. Ce guide est destiné au revendeurs
officiels Robomow et les Stations de Service Robomow.
Sommaire
Chapitre 1 Installation et écran de démarrage
1.1 Installation du Toolkit.
1.2 Setup Toolkit.
1.3 Ecran de demarrage.
1.4 Sauvegarder les données du robot et les renvoyer vers le robot.
Chapitre 2 Information
2.1 Vue d’ensemble du système.
2.2 10 Dernières opérations.
2.3 Historique Opérations.
2.4 Données Temps réel.
Chapitre 3 Paramètres
3.1 Options Pelouse.
3.2 Options tondeuse.
3.3 Paramètres Service, Menu Service.
Chapitre 4 Procédures Services
4.1 Remplacement carte mère.
4.2 Réglages d’usine.
4.3 Calibrations.
4.4 Mise à jour software.
4.5 Mise à jour software sans accès internet.
Chapitre 5 Tester le robot
5.1 Tester le robot
5.2 Test rapport
Hoofdstuk 6 Remote Toolkit ou Toolkit à distance
Robomow Guide technique Toolkit 2015 v.1
1
Chapitre 1 : Installation et écran de démarrage
1.1 Installation du Toolkit.
Nous allons installer le logiciel sur l’ordinateur . Ouvrez le lien qui vous a été fournie et sélectionnez
le lien Setup.exe.
Choisissez ensuite Exécuter pour lancer l’installation sur votre ordinateur.
1.2 Setup Toolkit
Apres avoir installé le logiciel nous allons paramétrer le port de communication. Tout d’abord nous
allons connecter le câble Bleu dans le port USB de votre ordinateur. Dans le futur utilisez toujours ce
même Port USB pour l’utilisation du Toolkit, nous conseillons de le marquer avec un autocollant.
Robomow Guide technique Toolkit 2015 v.1
2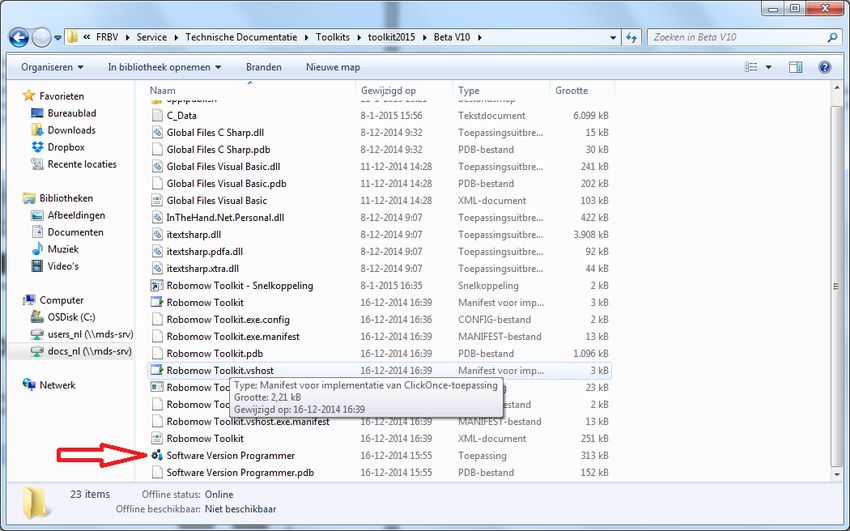
Ensuite allez au Panneau de Configuration de votre ordinateur et choisissez Système et ensuite
Gestionnaire de périphériques.
Puis vous sélectionnez Ports (COM & LPT). Ensuite repérez le port ou le message USB Serial Port
(COM..) le port avec ce numéro est le port USB à utiliser pour le Toolkit et le sera dans le futur. Nous
vous recommandons de marquer ce Port (autocollant etc…).
Robomow Guide technique Toolkit 2015 v.1
3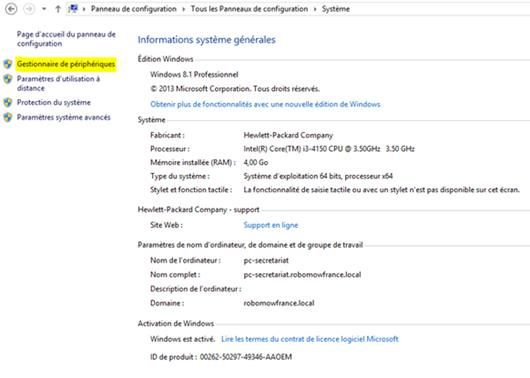
Vous pouvez maintenant ouvrir le Robomow Toolkit et accédez à la section paramètres, puis
communication. Un nouvel écran s’ouvrira.
Ces deux doivent être identiques!
Sur la ligne Nom du Port sélectionnez le Port sur lequel est branché le câble bleu.
Pour Baud rate du Port sélectionnez 19200. Cliquez ensuite sur le V et le Toolkit est prêt pour
utilisation.
Changement de langue
Pour changer la langue, cliquez sur Information.
Robomow Guide technique Toolkit 2015 v.1
4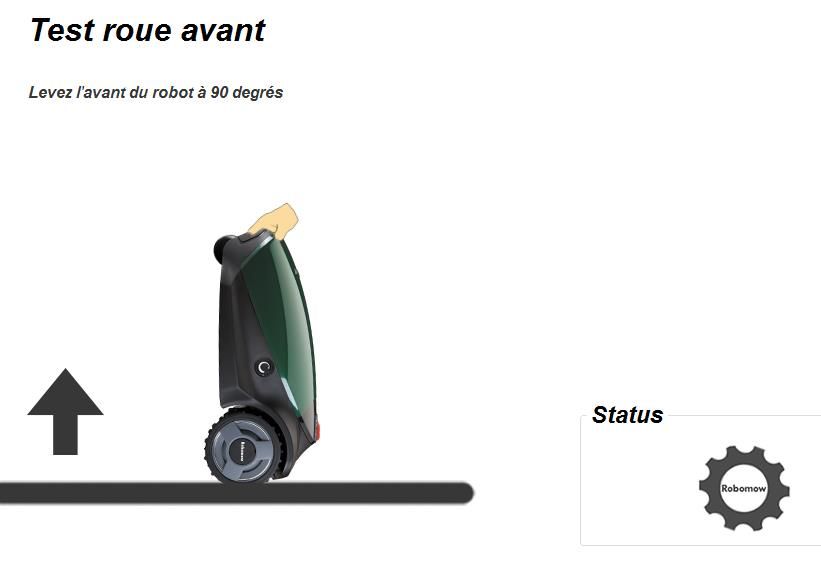
Puis Settings et Languages, sélectionnez French.
Puis quittez le Toolkit pour enregistrer le changement de langue.
1.3 Ecran de demarrage
Maintenant que le Toolkit est installé vous pouvez l’utiliser.
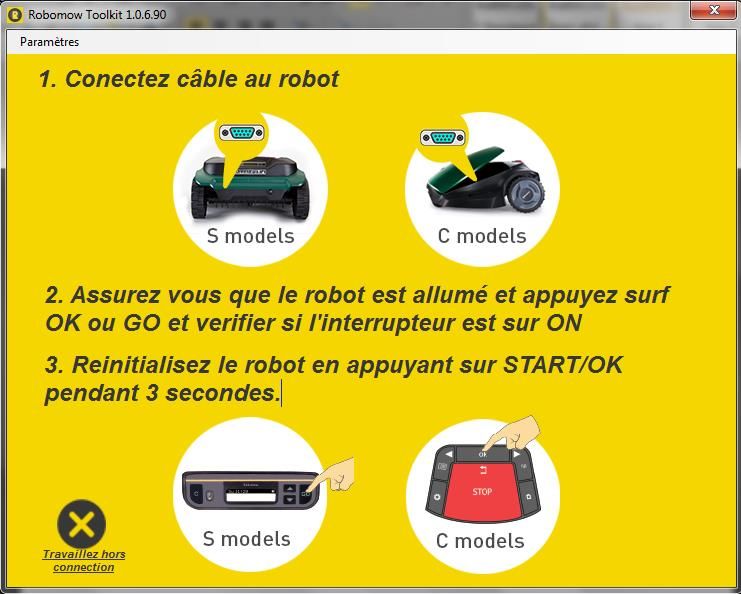
- Ouvrez le Toolkit, branchez le câble bleu sur le robot. Pour modèles C le branchement se
trouve sous le capot. Pour modèles S à l’arrière du robot.
- Allumez le robot. lorsqu’il est allumé: Pour modèles C appuyez pendant 3 secondes sur OK.
Pour modèles S appuyez 3 secondes sur GO. Afin de faire redémarrer le robot.
Robomow Guide technique Toolkit 2015 v.1
5
Le programme va soit directement télécharger les données soit vous demander si vous souhaitez
recevoir les données du robot. Cliquez sur le V pour recevoir les données, sur la croix pour annuler.
Vous entrez maintenant dans le Menu du Toolkit.
Afin d’utiliser le Toolkit dans sa totalité, vous pouvez activer le niveau TIER 2 sous l’onglet VUE
cochez ensuite la case TIER2 et renseignez le mot de passe 2312. Le Toolkit est maintenant prêt.
Robomow Guide technique Toolkit 2015 v.1
6
1.4 Sauvegarder les données du robot et les renvoyer vers le robot.
Avant de commencer à utiliser le Toolkit, avec le robot il est recommandé de sauvegarder ses
données dans un dossier sur votre ordinateur. Vous pouvez faire ceci en appuyant sur l’icône
disquette.
Lorsque vous avez fini de travailler sur le robot et que vous avez effectué une remise aux réglages
d’usine vous pouvez alors renvoyer les données vers le robot. Il n’y a donc plus besoin de
reprogrammer le robot avec les paramètres du client.
Lorsque vous souhaitez renvoyer les données vers le robot, cliquez sur l’icône ci-dessous :
Lorsque vous verrez le paramètres enregistrés sur cet écran, vous pouvez les renvoyer vers le robot
en cliquant sur l’icône ci-dessous :
Robomow Guide technique Toolkit 2015 v.1
7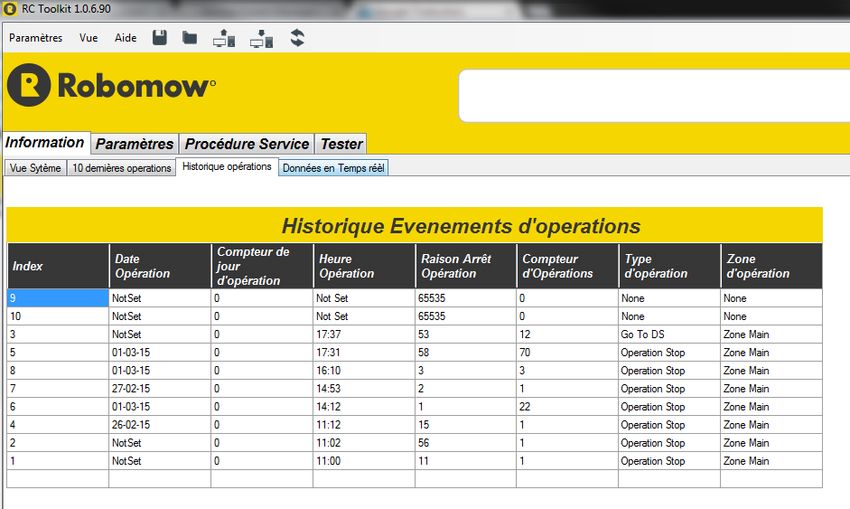
Le Toolkit va maintenant renvoyer les données enregistrés vers le robot. L’avancement de l’envoi
sera affiché.
Sans cette manipulation, il sera nécessaire de reprogrammer le robot (Installation unique de Départ,
Zones, Heures Inactives, etc..)
Chapitre 2: Information
2.1 Vue d’ensemble du système.
Sous l’onglet Vue Système vous trouverez les mêmes informations que ceux que vous pouvez
trouver dans le menu Données Détails.
Ci-dessous nous traiterons des différentes éléments ainsi que des valeurs qui devraient s’y trouver.
Dans l’onglet Configuration vous trouverez les informations uniques du robot. Un des éléments les
plus importants est Version Software. Cet écran permet également la consultation du numéro de
série lorsque celui-ci est devenu invisible.
Capacité batterie Max : en Ampère par heure.
Capacité de batterie actuelle: En Ampère par heure.
Voltage Batterie: Le total des 8 cellules en Volt. Cette valeur se trouve entre 25 et 26,5 Volt pour une
batterie neuve et chargé.
Courant Batterie: La consommation de la batterie (A).
Robomow Guide technique Toolkit 2015 v.1
8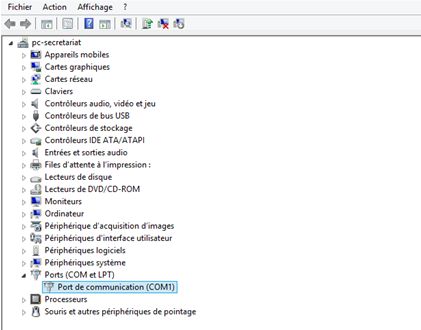
Statut de la batterie : 0=batterie entièrement déchargé , 1=batterie est vide , 2=batterie se recharge,
3= batterie est chargé.
Capacité retourné: Il s’agit de l’ampérage non enregistré par la batterie. .
Tension de charge: Tension délivré par le boitier de contrôle, celui-ci se trouve entre 32 en 34 Volt.
Tension de charge actuelle : le courant de charge fourni lors de différents stades de chargement.
Chargement PWM: Pourcentage de la totalité du courant de charge pouvant être fournie lors des
différents stades de charges. Voir tableau.
Statut de chargement 4 = stage 1, chargement rapide; 5 = stage 2 chargement lent. 6 = stage 3
balancement des batteries. Voir tableau.
Source de chargement: Station de base ou chargeur d’hiver.
Balancement de la batterie: Lorsque la batterie est entièrement balancé cette case sera coché.
Direction d’avancement : Direction d’avancement en degrés.
Distance: Distance parcourue en cm pendant la session de tonte actuelle.
Direction: La Direction d’avancement.
PWM: La De hoeveelheid kracht die gegeven wordt van het maximale vermogen in (%).
Courant : La quantité de courant qui est fournie sur le moteur gauche et droit. Ces valeurs doivent
être à peu près égales. La valeur devrait être entre 2,1 et 2,4 avec les roues libres. (en l’air).
Vitesse: la vitesse en nombre de tours par minutes.
Compteur de vitesse: Nombre de fois que l’aimant passe près de l’odomètre.
OVC: Lorsque cet case est coché, il y a eu une surtension du moteur en question.
Robomow Guide technique Toolkit 2015 v.1
9Cellule 1 à 8: Voltage mesurée pas cellule. La valeur d’une cellule dans le cas d’une batterie
entièrement chargé se trouve entre 3,5 et 4 V.
Lecture: Lorsque le robot est à plat la valeur devrait être 1. Lorsque l’avant du robot est levé la valeur
peut monter jusqu’à 255.
Compteur de vitesse : Nombre de fois que l’aimant passe près de l’odomètre.
Statut: Indique si le robot se trouve dans le périmètre ou en dehors du périmètre.
Amplitude: Démontre la puissance du signal, Plus le robot est proche du Câble plus haut sera cette
valeur. Le signal doit avoir une valeur d’au moins 50.
Amplitude relative : Est utilisé par le département recherche et développement par le fabricant.
Linéaire Amplitude: Est utilisé par le département recherche et développement par le fabricant.
Entrée : Cette valeur indique la distance jusqu’au câble de délimitation, cette valeur se trouve entre
0 et 7.
0 a pour signification proche du câble et 7 le milieu du terrain.
Quantité : Cette valeur doit se trouver au Statut IN sur 200 + -5 et statut OUT sur 400 + -5.
Robomow Guide technique Toolkit 2015 v.1
10PWM: Pourcentage de la puissance maximale pouvant être fournie.
Courant : Ampérage du moteur de tonte. Sans forcer la valeur doit se trouver entre 0,6 en 0,85.
Vitesse: Nombre de tours du moteur de tonte. En mode ECO celui-ci se trouve à 3300 RPM, Lors de
Turbomow celui-ci se trouve à 4000 RPM.
Direction : CW ( clockwise, horaire )par la droite et CCW ( counter clockwise, anithoraire ) par la
gauche.
Compteur de vitesse: Nombre de fois que l’aimant passe l’odomètre.
Sur charge : est coché lorsque une surcharge est détecté.
Pour les modèles S le moteur de droit et le gauche sont affichés.
Statut: ON= allumé
Lecture: Tension affiché en Volt.
X, Y et Z: Les valeurs des différents axes.
Statut: Lorsque est affiché ici ‘’DETECT’’ l’angle est trop important et le robot ne roulera plus..
Angle Vertical: Lorsque le robot est levé surf un des côtés, cet angle sera affiché en degrés ( ⁰ ).
Angle Horizontal : Quand on lève le robot sur l’avant ou l’arrière cet angle sera affiché en degrés ( ⁰ )
Inclinaison : La pente du sol en degrés.
Robomow Guide technique Toolkit 2015 v.1
11La température de différents éléments mesuré en degrés Celcius. ( ⁰C).
Pour les modèles S, le moteur gauche et droit seront affichés.
Lecture : Lorsque le capteur est sec, la valeur sera 28. Plus le capteur est humide plus la valeur est
basse. Lors d’une lecture d’une valeur de 25 la pluie est détecté.
Statut: Clear signifie que le pare choc n’est pas activé (ou appuyé).
Lorsque les boutons du clavier sont activés, la case correspondante sera coché.
Lorsque la poignée (modèles RS) est appuyé, le message ‘’PRESS’’ (appuyé) sera affiché à STATUT.
Lorsque la poignée RS est levé le message LIFT (levé) sera affiché à LECTURE, la valeur affichera 255.
Lors du test infrarouge d’une télécommande manuelle, les cases correspondantes seront cochés sur
le Toolkit.
Robomow Guide technique Toolkit 2015 v.1
122.2 10 Dernières operations.
Robomow dispose d’une base de données (Serveur RMS) dans laquelle les informations du robots
sont stockées lorsque le robot est connecté à l’application ou est équipé d’un module GSM.
Grâce au Toolkit il est possible de faire la demande des 10 dernières opérations du robot en se
connectant à la base de données Robomow.
Pour télécharger les 10 dernières opérations, remplissez le numéro de série et appuyez sur
Importation des données.
Ex: Un client vous téléphone en vous signalant que le robot n’a pas terminé ses 3 dernières sessions
de tonte.
Demandez le numéro de série du robot. Indiquez le numéro de série dans le Toolkit et appuyez sur
Importation des données, vous recevrez alors les informations du robot.
Les données indiquent que le robot est retourné plusieurs fois à sa station de charge pour se
recharger dans le premières 10 minutes de la session. Vous savez maintenant où chercher l’erreur.
Avec le Toolkit il est possible de recevoir les informations du robot sans être physiquement près du
robot.
2.3 Historique opérations
Sous l’onglet Information se trouve deux tableaux, l’onglet Historique Evènements d’opérations et
l’onglet Historique fonctionnement Batterie. Les tableaux nous informent sur l’historique
d’utilisation (10 dernières opérations), ces informations vont permettre d’établir un diagnostic.
Robomow Guide technique Toolkit 2015 v.1
13La définition du code ‘’raison d’arrêt’’ se trouve dans le Guide Service Modèles C : chapitre 3.2
Modèles S : chapitre 3.1
Le Compteur d’opération vous indique le nombre de fois que cet évènement a eu lieu.
Sous Type d’opération vous trouverez Opération Stop ou Opération Halt. Opération Halt signifie
que l’opération à été arrêté mais ensuite reprise. (Lors d’un perte de signal momentanée par
exemple)
Grâce à ses informations, vous verrez la durée de la session de tonte et si etait chargé entièrement
avant son départ.
2.4 L’onglet Données Temps réèl.
Cette option est utilisé par le département Développement et Recherche de Robomow.
Robomow Guide technique Toolkit 2015 v.1
14Chapitre 3 Paramètres
3.1 Options Pelouse
Sous cette option nous trouverons les informations relatives à la pelouse. Ces paramètres seront
renseignés dans le tableau.
Il est préférable de sauvegarder ses informations avant d’effectuer une remise à zéro afin de pouvoir
les ceci est expliqué en détail au chapitre 1.4 de ce manuel. Cette option permet de gagner du
temps.
Nous y trouvons également les heures inactives.
Ces heures peuvent être changés tranquillement par le Toolkit.
ATENTION!! Si Heures inactives 1 et Heures Inactives 2 sont activés (cochés) simultanément. Le
robot ne sortira pas de manière automatique car conflit dans son schéma de tonte.
3.2 Options tondeuse
activé: Si coché le code antivol est activé.
Code: Le code Pin sauvegardé s’affichera ici.
Robomow Guide technique Toolkit 2015 v.1
15Activé : Coché si le capteur de pluie est activé
Sensibilité: Lorsque le robot mesure 25 le robot ne sortira pas tondre. Lors d’une session de tonte le
robot rentrera dans la station de base. Il est conseillé de mettre la sensibilité sur 25.
Activé: Si activé les sons sont activés. Les sons relatifs à la sécurité ne peuvent pas être éteints.
Ceci n’est PAS la langue mais le façon d’écriture des dates et l’utilisation du système métrique.
Activé: Si coché la sécurité enfant est activé .
Robomow Guide technique Toolkit 2015 v.1
16L’Onglet GSM permet de d’activer ou de désactiver le module GSM, il est également possible
d’effectuer des changements rapidement.
L’installation du Kit Accessoire Module GSM se fera par l’application sans utiliser le Toolkit.
Modèles S uniquement: Permet de régler le contrats du l’écran LCD du robot.
3.3 Paramètres Service, Menu Service.
Il s’agit du Menu Service du robot (Modèles C: codes PXXX; Modèles S Menu Service. Dans ce
chapitre vous trouverez les informations présentes dans le Menu Service du robot.
Robomow Guide technique Toolkit 2015 v.1
17Sensibilité: Waarde waarbij de overstroom wordt ingeschakeld in 100 (mA).
Temps: Durée en secondes suite auquel se déclenche la surintensité.
Lorsque on mesure 2500mA pendant 3 secondes la surintensité sera activé.
Reconnaissance de distance: Indique la distance en mètres à laquelle le robot détecte la station de
base.
Télémétrie: Doit toujours être activé (coché) pour démarrer le processus de charge par la base
Capacité de recherche sur la zone principale et zones secondaire (A en B): Lorsque le robot atteint la
valeur indiqué, il récupèrera le câble de délimitation pour rentrer à la station de charge. Valeur en
mA.
Voltage recherche: Lorsque la valeur en mV d’une cellule de la batterie se retrouve en dessous de
cette valeur le robot recherchera sa station de base pour s’y recharger..
Robomow Guide technique Toolkit 2015 v.1
18Type: Pour les zones principales et les zones secondaire, le courant de charge maximum en mA par
zone
Source : Automatique = Selon Programme de tonte,
Adaptateur = Chargeur d’hiver.
Base = Station de charge.
Moteur de tonte activé: Indique que le ou les moteurs de tonte(s) sont activée(s).
Eco mode: Coché si activé
Vitesse ON : Nombres de tours par minute (RPM) en mode Eco.
Vitesse OFF: Nombres de tours par minute (RPM) en mode Turbo.
Sensibilité: Valeur pour afficher la désactivation du mode ECO.
Sensibilité Surintensité: Waarde wanneer overstroom wordt gedetecteerd in 100 (mA).
Temps: Temps en seconde lorsque la surf intensité est détecté .
Robomow Guide technique Toolkit 2015 v.1
19Temps arrêt: Indique le temps en secondes de désactivation des lames lorsque le capteur de sécurité
est activé. Pour des raisons de sécurité il est recommandé de ne pas changer cette valeur.
Sens: Sens du moteur.
Activé: coché si passage étroit est activé.
Largeur: Largeur du passage étroit (en cm).
Longueur: Longueur du passage étroit (en m).
Activé : Coché si l’option est activé.
Distance: Distance de recul (en cm) du robot lors de la détection du câble.
Virages in Motion activé: Coché si l’option Smartmow est activé.
Suivie du Câble à distance : Distance en cm jusqu’au câble où le robot commence le virage In Motion
lors du Smartmow.
Compensation traction: Valeur de compensation de la traction lorsque le robot navigue sur une
pente..
Compensation inclinaison: Compensation permettant au robot de continuer la navigation sous un
angle.
Robomow Guide technique Toolkit 2015 v.1
20Sauvetage Bordure: Lorsqu’un robot rencontre le câble de délimitation et est dans l’impossibilité de
reculer, le robot récupèrera le câble et le suivra sur la distance indiqué ci-dessous. Le robot quittera
ensuite le câble pour reprendre le tonte à l’intérieur de a zone. Activé si coché.
Vitess basse suivie du câble à distance activé: Si coché cette option est activé, le robot roulera moins
vite lors de la rencontre avec le câble.
Distance près du câble : Distance maximale du Câble lorsque cette option est activé
Suivie du câble à distance: si coché l’option suivie du câble à distance.
Sub zone doorgang lengte: in (cm).
Temps arrêt: Temps en secondes que le robot désactive ses lames lorsque ses capteurs de sécurité
sont activés.
Statistiques: si coché, les paramètres peuvent être lus.
Température minimale: Si coché l’option est activé (recommandé).
Température minimale départ base: en Degrés Celcius, le robot ne démarrera pas en dessous de
cette température.
Type: Capacité maximale de la batterie en mA.
Courant de charge: Courant de charge maximal autorisé en (mA) lorsque la batterie est en
balancement.
Robomow Guide technique Toolkit 2015 v.1
21Activé: si coché l’odomètre de la roue avant est activé.
Détection distance patinage: Distance patinage (en mètre) pour que l’odomètre s’active et détecte
le patinage.
Détection Odomètre : Valeur mesurant l’odomètre.
Sensibilité avant : Valeur en (mA) du moteur de traction signalant qu’un obstacle est détecté lorsque
le robot avance. van de aandrijfmotor die aangeeft dat er een obstakel is wanneer de robot vooruit
gaat.
Sensibilité côté: Valeur en (mA) du moteur de traction signalant qu’un obstacle est détecté lorsque
le robot avance surf le côté.
Temps: Temps en secondes de déclanchement du pare choc lorsqu’un obstacle est détecté.
Changement de sensibilité actuelle : Valeur en mA du moteur de traction signalant qu’un obstacle
est détecté lorsque le robot utilise la détection d’obstacle par les moteurs traction..
Changement de l’heure actuelle : Temps en secondes de déclanchement de l’obstacle.
Pour des raisons de sécurité il est recommandé de ne pas changer ces paramètres.
Activé : Activé si coché.
La section Bluetooth n’est visible que lorsque un modèle S est connecté au Toolkit.
Pour les modèles C il n’est pas possible d’éteindre le Bluetooth par le Toolkit.
Robomow Guide technique Toolkit 2015 v.1
22Chapitre 4 Procédures de Service
4.1 Remplacement carte mère
Disponible pour RSS uniquement.
4.2 Réglages d'usine
Parfois il est nécessaire d’effectuer un reset sur le robot. Vous pouvez réaliser les différents Reset par
le Toolkit ou directement sur le robot avec une combinaison de touches. Le Toolkit vous demandera
toujours une confirmation.
Lors d’une remise aux régalages d’usine les données enregistrés sur le robot (installation unique de
départ, Zones, Heures Inactives etc..) seront effacées ; il est donc important de sauvegarder ces
données avant le Reset.
4.3 Calibrations
Il est possible d’effectuer les différentes calibrations par le Toolkit.
Cliquez sur la Calibration que vous souhaitez réaliser et suivez les instructions s’affichant sur l’écran.
Le Toolkit vous indiquera ensuite si la Calibration a pu être réalisé avec succès.
4.4 Mise à jour du Software.
Robomow est constamment en train d’améliorer et de faire évoluer ses produits, il est donc
important que le robots soient équipés de la dernière version de logiciel disponible à ce moment
pour le modèle concerné.
Robomow Guide technique Toolkit 2015 v.1
23Lorsque le robot est connecté au Toolkit, le Toolkit vous indiquera si une mise à jour est disponible
ou si le robot en est équipé. Pour effectuer la disponibilité de nouveaux software votre PC doit être
connecté à Internet.
Sous l’onglet Version mise à jour. Vous pouvez :
- Contrôler si une nouvelle version est disponible.
- Programmer le robot avec la nouvelle version.
La mise à jour du soft est décrite en chapitre 4.5 de ce Guide.
Vérifiez si une nouvelle version de soft est disponible.
Appuyez simplement sur le bouton ‘’Contrôlez….’’
Le Toolkit va vous indiquer si une nouvelle version est disponible.
Robomow Guide technique Toolkit 2015 v.1
24L’option Programmez nouveau software est maintenant disponible. Lorsque vous cliquez sur ce
bouton une nouvelle fenêtre va s’ouvrir vous demandant de sauvegarder les paramètres du robot :
Dans le cas où vous souhaitez sauvegarder les données du robot cliquez sur V. Le Toolkit va
maintenant télécharger les données du robot sur votre PC.
Le Toolkit vous confirmera la sauvegarde des données.
Robomow Guide technique Toolkit 2015 v.1
25Puis apparaitra un message : Appuyez simultanément sur les boutons GO et RETOUR du robot
jusqu’à ce que l’écran du robot s’éteint complètement, puis relâchez les touches. Le robot est
maintenant en mode Mise à jour.
n.b. : Si vous appuyez trop longtemps l’écran se rallumera, répétez alors l’opération.
Lorsque le robot est en Mode mise à jour, appuyez sur la flèche jaune. Pour commencer la mise à
jour du software.
Attention : Si le Baud rate n’est pas correct, la mise à jour ne fonctionnera pas.
Robomow Guide technique Toolkit 2015 v.1
26S’ouvre alors un écran Software Version Programmer, ce logiciel va effectuer l’effacement de
l’ancienne version et remettre la nouvelle.
Vous pouvez suivre l’avancement dans la barre d’avancement.
Une fois le nouveau software installé, il faut effectuer une remise à aux paramètre Usine : Software
sous l’onglet Défaut Usine.
Robomow Guide technique Toolkit 2015 v.1
27Une fois le Reset réalisé, les données du robot enregistrés préalablement peuvent être renvoyés vers
le robot. (chapitre 1.4)
4.5 Mise à jour du Software sans accès Internet.
Dans le cas où vous ne disposez pas d’un accès à internet sur votre ordinateur il est possible de
réaliser la mise à jour si vous avez sauvegarder les versions software sur votre disque dur.
Assurez-vous de toujours avoir les dernières versions du logiciel de chaque modèle sur votre
ordinateur.
Ceci fonctionnera avec le Logiciel Software Version Programmer.
Un descriptif complet vous sera envoyé lorsque cet option est disponible.
Robomow Guide technique Toolkit 2015 v.1
28Il faut mettre le robot en mode mise à jour avec les combinaisons de touches : Pour RC STOP + OK ;
pour RS GO et Fleche précédent jusqu’à ce que l’écran est éteint. Puis appuyer sur la flèche jaune
pour lancer la mise à jour.
Robomow Guide technique Toolkit 2015 v.1
29Chapitre 5 Test
5.1 Tester le robot
Ici vous pouvez effectuer des Test élément par élément, comme dans le Menu Service du robot. Il est
également possible d’effectuer tous les Test par le Toolkit.
Cochez la case souhaitée et appuyez sur TEST.
Lors des differents Tests le Toolkit vous indiquera les manipualtions à réaliser sur le robot.
Robomow Guide technique Toolkit 2015 v.1
30Après avoir réalisés les Tests, le Toolkit générera automatiquement un rapport de Test.
ATTENTION :
Lors de la réalisation de Tests par le Toolkit le ou les moteur(s) de
lames et de traction vont se mettre en marche.
Prenez vos précautions !
5.2 Rapport de Test
Maintenant que les Test ont étés réalisés, un rapport de Test vous sera généré. Ce rapport vus
indiquera les réussites et éventuel échecs de chaque élément testé.
Lorsqu’un Test a échoué la raison sera indiqué.
Il vous est également possible d’ajouter une remarque écrite sur ce rapport de Test sous le champ
commentaire général.
L’icône vous permettra d’enregistrer sur ordinateur de Test.
L’icône vous permettra d’imprimer le rapport de Test.
Robomow Guide technique Toolkit 2015 v.1
31Chapitre 6 Remote toolkit ou Toolkit à distance.
Le Remote Toolkit est en développement et sera mis en service au courant de la saison 2015.
Lorsque celui sera opérationnel ce chapitre sera mis à jour.
Robomow Guide technique Toolkit 2015 v.1
32Vous pouvez aussi lire