La mécatronique dans l'automobile Enjeux et Défis - Franck Guillemard, PSA Peugeot Citroën Journée Technique Automobile Lorraine/Champagne-Ardenne ...
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

La mécatronique dans l’automobile
Enjeux et Défis
Franck Guillemard, PSA Peugeot Citroën
Journée Technique Automobile Lorraine/Champagne-Ardenne
25 juin 2013, Florange
25/06/2013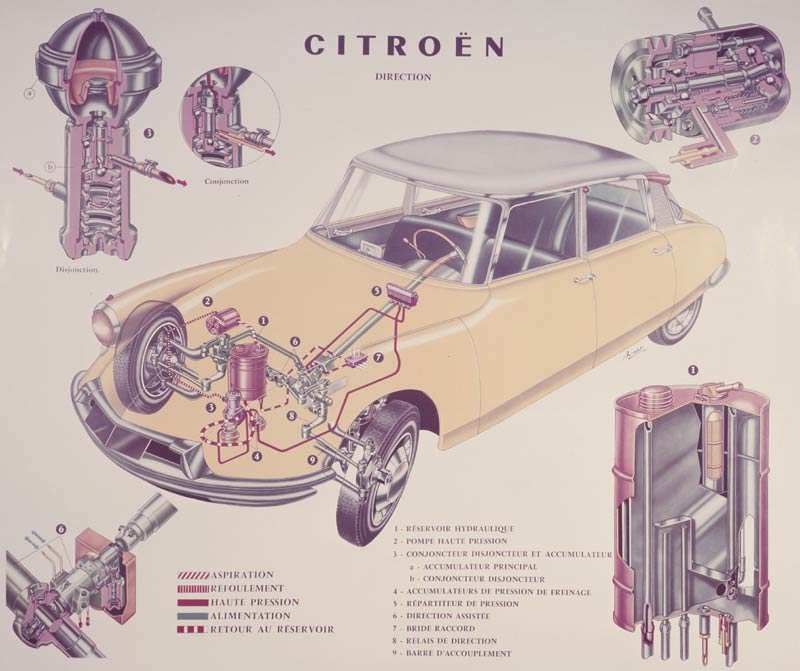
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Introduction
Concurrence Normes
De tout temps
Couplage des technologies
Complexité croissante
+
Technologies électroniques et numériques
Depuis les
années 90
Systèmes mécatroniques
Evolutions produit
« Vers le véhicule autonome »
Evolutions outils de conception
« Model Based Design »
2
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
3
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Au début l’homme maîtrisait toute la machine
Le conducteur agit
sur le véhicule
1 sans assistance
énergétique
3
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
4
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Puis l’automatique via l’hydraulique & l’électricité a commencé à envahir la
machine pour réaliser des systèmes à réponses programmées.
Contrôle/Commande
Analogique
2
4
00806_13_00010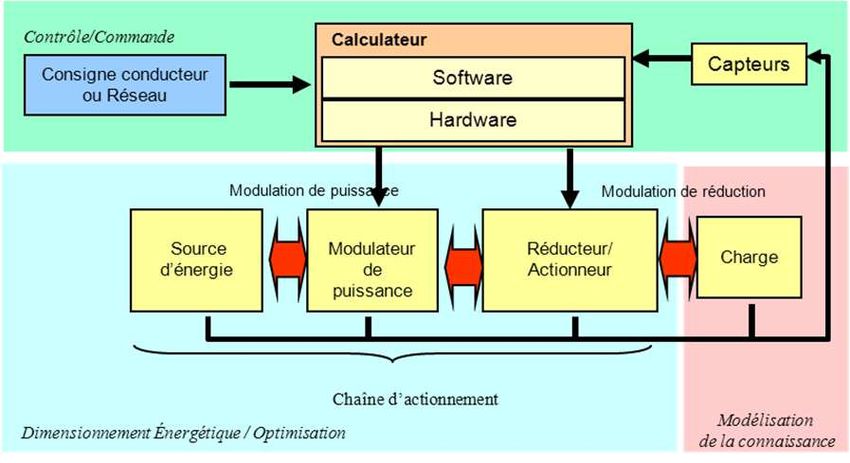
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
5
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Dans les années 1990 c’est l’introduction de l’électronique avec une réponse
adaptative des organes. 4
3
Déferlement d’innovations
électroniques:
· Des composants
électromécaniques pilotés
3 par électronique remplacent
des composants mécaniques
et hydrauliques
· Intégration en modules et
systèmes indépendants
5
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
6
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Puis c’est le règne de l’électronique avec une réponse adaptative des
systèmes.. FAISCEAU PORT E SAC
SATELLITE CAPTEUR LATERAL
ALLUMEUR LATERAL
PRECRA SH ENROULEUR ARD ARD
CAPOT ACTIF AVD LATETAL D REVERSIBLE PAS S
D SATELLITE
LATERAL PRETENSIONN
ARD EUR ARD
CAPTEUR
CHOC PIETON
D
1,2,
3 CAP
OT
NAPPES
SAC
LATERAL
PASSAGER
PRETENSIONN
EUR
SATELLITE D’ASSIS SE ET
D’ASSISSE PASSAGER
FRONTAL D AC TI SAC DORSALE F
1 F GENOUX A
P
PASSAGER
ASSAGER CO I
F V CAPTEUR S Bouclage
SAC GONF.
A PASSAGER CLEF
GLISSIERE
C pass
CAPTEUR PASSAGER vers BSI
I INHIB
CAPTEUR
PRECRA SH
S
C
PASSAGE
R 4
DE MASSE
PASSAGER S
FRONTAL , I
E E
POINT DE POINT DE 5 4 4
A MASSE MASSE G 8
2 U N°40 N°54 BOIT IER ,
ARCEAU D
E
FAISCEAU PLANCHE DE RBG 5 FAISCEAU HABIT ACLE
Planc habit a
P BORD 8 9 G
P 7ARCEAU 5 9
FIBRE he cle 7
1
OPTIQUE
PIETON
R
I
POINT DE
de
CAPTEUR
bord
GLISSIERE
A
S
N S
MASSE COM SAC CONDUCTE
C N°31 GENOUX UR
I
2000 F
Intégration et
CONDUCTECAPTEUR
P UR DE MASSE A
3 CONDUCTE I
A UR
L S
SATELLITE
NAPPES CO C
SAC GONF. D’ASSISSE ET
FRONTAL G V
CAPTEUR
CONDUCTE
UR B DORSALE
SAC LATERAL
CONDUCTEUR POINT DE
S
PRETENSIONN
EUR
CONDUCTEUR
SIALLUMEUR MASSE I
mise en réseau de
CHOC PIETON PRETENSIONN
G N°xy
N°xy E EUR ARG
CAPOT ACTIF ENROULEUR
G REVERSIBLE
G
SATELLITE CAPTEUR COND E
LATERAL PRECRA SH
AVG LATETAL G SAC
C FAISCEAU PORT E LATERAL
O ARG ARG
l’électronique :
N
D
· Multiplexage
4 · Fonctions
distribuées Quelques défis :
· Structures de *Diminution de la
pilotage consommation
hiérarchisées *Gestion de
l’information à bord
6
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
7
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Aujourd’hui, c’est celui de l’informatique avec une réponse adaptative des
systèmes en tenant compte de l’environnement proche.
Radionavigation
Intégration du
véhicule dans son Quelques Défis:
environnement: *Aide à la conduite dans toutes les situations
· Systèmes Distance Alert *Interface homme machine appropriée
*Extraction d’informations pertinentes à
d’information partir des images de l’environnement
5 · Diagnostics AFIL *Validation du système (diversité des
(OBD) situations
Détection de vie, flotte de véhicule ,
obstacle
· Aides à la Bassesimulateur
vitesse de conduite)
Conduite *Impact lié à la présence de différentes
catégories de véhicules
Détection angle mort
7
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
8
Evolution et Défis Evolution et Défis
Mécatronique & Automobile : Evolutions
Puis celui de l’informatique avec une réponse adaptative des systèmes en
tenant compte de l’environnement lointain (anticipation).
ITS
Informatique Quelques Défis:
intégrée au *Organisation de l’information
véhicule : *Validation des fonctionnalités
· Applications *Prise en compte des retards dans
l’information
6 télématiques *IHM approprié
· Continuité *Mobilité multimodale
domicile –
bureau–
voiture
· Auto PC Connects Apps
8
00806_13_00010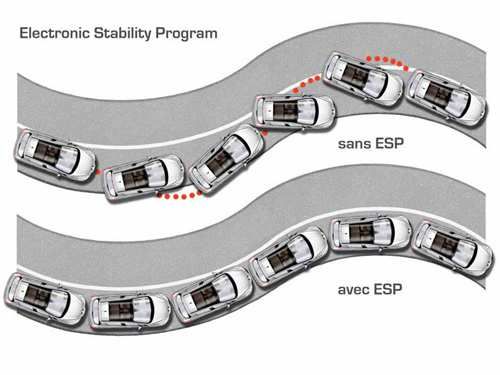
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Objectifs et Contraintes
pour les systèmes mécatroniques dans l’automobile
Quelques ordres de grandeur :
•Calculateurs + Câblages + Boîtiers = 15 à 20% prix du véhicule (hors véhicules électrifiés)
•Logiciel = 20% prix calculateur
•Nombre moyen de calculateur sur un véhicule européen : 20 et au plus 60
•Jusqu’à 250 capteurs , 40 types d’éclairage, 120 petits moteurs électriques
Calculateur
Consigne Capteurs
Software
conducteur ou
Réseau Hardware
Modulation de puissance Modulation de réduction
Source Modulateur Réducteur/ Charge
d’énergie de Actionneur
puissance
Chaîne d’actionnement
Objectifs pour les fonctions : Complexité croissante liée à :
*Performantes *Diversité et Multiplicité des fonctions pilotées
*Robustes *Non linéarité des systèmes physiques
*Fiables *Pluri-actionnement des systèmes physiques
*Sures *Gestion des compromis
*Facilement calibrables *Diversité des incertitudes
*Facilement diversifiables *Diversité des perturbations
*Viables économiquement
9
00806_13_00010
Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Bilan des outils existants:
Outils logiciels de conception : 3 catégories
Conception
géométrique
GEOMETRIE
CAO
Conception globale
Conception locale énergétique et
énergétique et dynamique *Modèles complets de synthèse du système
dynamique
mécatronique (charge , chaîne
Analyse déformations mécaniques *Analyse performances énergétiques et d’actionnement et système de pilotage)
écoulement liquide et gaz, champs magnétique dynamiques (rapidité, stabilité, robustesse) *Outils conviviaux, faciles d’emploi , munis
champs thermiques, ... de nombreuses bibliothèques
*Système multiphysique et C/C mathématique, physique et technologiques
DYNAMIQUE
Systèmes Paramètres Distribués
facilitant la construction des modèles
Logiciels Eléments finis Systèmes Paramètres Localisés *Rôle central de l’outil Matlab/Simulink
Tendance vers le multiphysique
Logiciels mécatroniques
Bénéfices : Validation virtuelle du système, diminution du nombre d’essais réels,
Coûts et délais de réalisation réduits
10
00806_13_00010Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Approche Model Based Design(MBD)
Utilisation du modèle dans toutes les phases de conception
Prototypage Rapide HIL
*Conception et validation du système C/C en simulation
*Prototypage rapide dans les premières phases de conception pour tester
le C/C
*HIL dans les phases terminales pour tester le logiciel final en utilisant le
modèle TEMPS REELS du système physique
Contrôle/Commande
Philosophie
Calculateur Cycle en V
Réseau Capteurs Bond Graph
Software
Hardware
Modulation de puissance
Source Modulateur Réducteur/ Charge Logiciels modélisation
d’énergie de Actionneur
puissance mécatronique
Chaîne d’actionnement
…
Modélisation
Dimensionnement Énergétique / Optimisation de la connaissance
*Mise au point des modèles de composants de la chaîne *Mise au point du modèle de la charge
d’actionnement *Prototypage rapide / système d’acquisition
*Prototypage rapide pour comparer les essais et le modèle pour comparaison essais modèle
*Technique d’identification *Technique d’Identification
*Dimensionnement de la chaîne d’actionnement en simulation. 11
Validation sur banc en utilisant le prototypage rapide
00806_13_00010Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Défis à relever dans les outils
Prototypage Rapide HIL
Contrôle/Commande hybride
*Méthode de synthèse architecture
fonctionnelle et dysfonctionnelle
*Validation exhaustive et rapide
des scénarii menant aux évènements redoutés
Philosophie Cycle en V
Bond Graph
Contrôle/Commande
Calculateur
Réseau Capteurs
Software
Hardware
Modulation de puissance
Source
d’énergie
Modulateur
de
Réducteur/
Actionneur
Charge Langage commun de conception : Environnement collaboratif de
puissance
Formation aux BondGraph dans conception :
toutes les écoles d’ingénieur & *Outil de gestion de configuration de
Chaîne d’actionnement
universités modèle.
Modélisation
de la connaissance
*Bibliothèque maintenue de modèles
Dimensionnement Énergétique / Optimisation
*Guide de gestion des modèles dans un
Logiciels modélisation projet (construction, exploitation,
mécatronique échange, capitalisation)
Outil de pré-dimensionnement : *Base de données unique de
définir l’architecture du système et son paramétrage
paramétrage à partir d’un premier cahier des …
charges et des divers retours expériences acquis
pour lever les principaux risques avant le
prototypage
Outil d’analyse de sensibilité:
Outil rapide d’analyse de sensibilité,
fournissant des résultats précis.
Intégration systématique de 12
l’incertitude dans toute simulation
00806_13_00010Introduction Mécatronique & Automobile Mécatronique & Outils Conclusions
Evolution et Défis Evolution et Défis
Conclusions
Aujourd’hui La majorité des fonctions du véhicule sont mécatroniques, ce qui a permis la réalisation de fonctions irréalisables
auparavant sans électronique numérique (les voitures ne seraient plus homologables sans mécatronique ! ).
Des défis importants à relever sur le véhicule de demain (réduction de la consommation, aide à la conduite généralisée) avec
un rôle central du pilotage.
Systèmes mécatroniques automobiles = systèmes complexes
Nombreux critères à prendre en compte : PERFORMANCE, ROBUSTESSE, FIABILITE, SURETE DE FONCTIONNEMENT, FACILITE
DE REGLABLE, MODULARITE, COÛT.
Dans la conception des systèmes mécatroniques automobile, le modèle et la simulation ont un rôle central
Des théories et/ou les outils associés (car sans outils, pas de propagations de théories) sur les architectures de puissance et de
commande sont encore nécessaires pour permettre une synthèse amont des systèmes complexes :
Mélange discret et continu
Conception simultanée système passif et actif
Fonctionnel et dysfonctionnel
Prise en compte systématique de l’incertitude
Dimensionnement des chaînes d’actionnement
Un espace collaboratif multidisciplinaire de conception facilitant l’intégration physique et l’intégration fonctionnelle est
également nécessaire.
Espace de couplage des outils CAO + maillage + mécatronique
Espace d’assemblage, d’échange, de gestion de modèles mécatroniques à l’image de ce qui existe pour la CA0.
A la clef :
Amélioration qualité – coûts – délais
Rationalisation du processus de conception
Normalisation
13
00806_13_00010Vous pouvez aussi lire