Les solutions actuelles de motorisations pour véhicules électriques
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Les solutions actuelles de
motorisations pour véhicules
électriques
Édité le
Xavier RAIN 16/03/2020
Cette ressource est issue d’une publication de La Revue 3EI, numéro 99 de janvier 2020.
Xavier Rain est docteur et professeur agrégé de génie électrique à l’IUT de Cachan, Université de
Paris-Saclay.
Le moteur électrique, élément clé de la chaîne énergétique d’un véhicule n’a cessé d’évoluer
depuis “la jamais contente“ de 1899 [1] jusqu’à nos jours. Les premiers véhicules électriques
étaient pourvus de moteurs à courant continu à excitation séparée réglable. Ils ont été remplacés
depuis la fin des années 1990 par des moteurs à courant alternatif, ceci grâce aux progrès réalisés
en électronique de puissance et de commande. Par rapport à leurs prédécesseurs, ces moteurs
sont beaucoup plus robustes, ont une puissance massique et volumique plus élevée, et un
meilleur rendement.
Trois technologies sont actuellement utilisées. Ce sont les machines synchrones dites excitées au
rotor, par des aimants permanents ou par des bobinages, et les machines à induction (ou
asynchrones).
Cette ressource présente les caractéristiques requises pour un moteur électrique dédié à la
traction d’un véhicule, puis détaille chacune de ces trois technologies de motorisation. Pour
chacune d’elles, leurs caractéristiques et les raisons qui ont motivé les constructeurs pour leur
choix seront présentées. Quelques exemples de moteurs existants seront ensuite détaillés, et
pour finir, il sera expliqué très succinctement le principe de leur commande pour une application
véhicule électrique.
1 – Caractéristiques requises pour un moteur électrique de traction
Le moteur doit répondre à un besoin en puissance et en couple pour satisfaire au minimum le
fonctionnement standard du véhicule. Cette standardisation est basée sur des cycles de
fonctionnement normalisés. Depuis septembre 2018, le cycle WLTC, nommé aussi WLTP
(Worldwide harmonized Light vehicules Test Cycles / Procedures) est le nouveau cycle
d’homologation pour mesurer la consommation de carburant, l’autonomie électrique, les rejets
de CO2 et de polluants. Il remplace le cycle NEDC datant de 1973, et mis à jour en 1996. La figure
1 montre ce cycle, de classe 3 (pour les véhicules dont la puissance massique est supérieure à 34
W/kg, soit la majorité des voitures) [2].
Figure 1 : Cycle WLTC classe 3, source [2]
1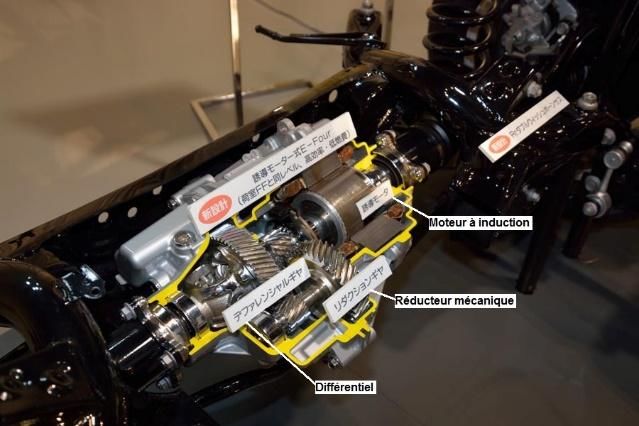
Par rapport à son prédécesseur, il reproduit plus fidèlement le fonctionnement réel d’un
véhicule.
Il est alors intéressant de connaître quel est le besoin en couple et en puissance à la roue motrice
pour satisfaire ce cycle. Nous avons pris l’exemple de la Renault Zoé, dont les caractéristiques
permettant de calculer ces grandeurs sont connues [3]. Grâce au logiciel Matlab-Simulink, nous
avons, à partir du cycle WLTP classe 3 et des équations mécaniques classiques, calculé le couple
et la puissance mécanique à la roue. La figure 2 montre les résultats.
Les courbes enveloppes de ces caractéristiques montrent qu’un couple d’environ 900 N.m est
requis de 0 jusqu’à 50 km/h, et qu’une puissance mécanique d’environ 52 kW est requise
d’environ 70 km/h jusqu’à la vitesse maximale de 130 km/h.
Couple à la roue de la Zoé pour le cycle WLTP classe 3
1000
500
(N.m)
0
-500
-1000
0 20 40 60 80 100 120 140
4
x 10 Puissance mécanique à la roue de la Zoé pour le cycle WLTP classe 3
7.5
5
2.5
(W)
0
-2.5
-5
0 20 40 60 80 100 120 140
Vitesse (km/h)
Figure 2 : Couple et puissance mécanique à la roue de la Zoé pour le cycle WLTP classe 3
Il y a donc une zone à basse vitesse où un couple important doit pouvoir être délivré, suivie d’une
zone où la puissance mécanique maximale doit pouvoir être fournie. Le couple maximal et la
puissance maximale à la roue seront en pratique plus élevées que les valeurs issues du cycle
WLTP. En effet, le couple maximal à la roue est déterminé par des considérations de démarrage
en côte à charge maximale, et la puissance maximale à la roue l’est pour garantir une certaine
capacité d’accélération à toute vitesse lors des dépassements.
Les moteurs électriques utilisés pour la traction répondent parfaitement à ces caractéristiques,
comme le montre la figure 3 [4].
Figure 3 : Caractéristiques couple/puissance pour un moteur électrique de traction, source [4]
Ils peuvent délivrer un couple important constant de l’arrêt jusqu’à une vitesse appelée vitesse
de base, puis une puissance mécanique maximale constante sur une plage de vitesse, qui
2
correspond à la zone dite de défluxage. Selon les moteurs, il existe parfois une troisième zone où
la puissance mécanique maximale ne peut plus être maintenue constante (cas notamment des
moteurs à induction).
Il est donc possible, contrairement aux moteurs thermiques, de coupler le moteur électrique aux
roues avec une transmission à rapport de réduction fixe, afin d’adapter le couple et la vitesse.
C’est la solution utilisée actuellement par quasiment tous les constructeurs, car elle est
économique.
Mais il est techniquement tout à fait possible de mettre une boîte de vitesse à faible nombre de
rapports entre les roues et le moteur. L’équipementier Allemand ZF en a développé une à 2
rapports pour véhicules électriques [5]. Il y a plusieurs intérêts pour cette transmission :
1. cela permet de sous dimensionner le moteur en couple car le premier rapport, utilisé à
basse vitesse, permet de récupérer le couple nécessaire à la roue. Le moteur est ainsi
plus léger, plus compact et moins coûteux.
2. la largeur de la plage de vitesse à puissance maximale constante du moteur peut être en
théorie deux fois plus petite qu’aux roues grâce aux deux rapports. Le moteur peut ainsi
être mieux optimisé lors de la conception.
3. les 2 rapports offrent un degré de liberté supplémentaire pour ajuster le point de
fonctionnement du moteur dans le plan vitesse-couple. Sur un cycle de fonctionnement,
cela permettrait de faire fonctionner le moteur plus longtemps dans des zones de meilleur
rendement, et ainsi d’accroître le rendement énergétique sur cycle, et donc l’autonomie.
Les principaux inconvénients de la boîte de vitesse sont :
1. sa complexité mécanique, et donc son coût.
2. les “trous“ à l’accélération lors du passage des rapports, ce qui casse l’impression de
fluidité du véhicule électrique, agrément de conduite apprécié des utilisateurs.
Actuellement, cette transmission ne séduit donc pas les constructeurs, hormis Porche pour sa
supercar électrique : la Taycan [6].
Pour avoir des moteurs avec une bonne puissance massique (quelques kW/kg pour les moteurs
conventionnels), il faut les faire tourner à grande vitesse, généralement supérieure à 10000
tr/min pour la vitesse maximale du véhicule. Actuellement, la technologie des rotors des moteurs
et des réducteurs utilisés sur la plupart des voitures limite les vitesses maximales à moins de
20000 tr/min.
On attend aussi d’autres caractéristiques importantes pour un moteur de traction pour véhicules
routiers : un bon rendement dans une zone la plus étendue du plan vitesse-couple, une bonne
robustesse vis-à-vis des conditions climatiques et d’utilisation du véhicule, et un coût acceptable.
2 – Les différentes motorisations actuellement utilisées
Dans cette partie, nous allons passer en revue successivement les trois types de moteur : les
moteurs synchrones à aimants permanents, les moteurs à induction et les moteurs synchrones à
rotor bobiné. Pour chacun d’eux, nous exposerons d’abord leurs principales caractéristiques et les
raisons qui ont motivé les constructeurs pour leur choix. Nous détaillerons ensuite quelques
moteurs existants, et nous terminerons par une présentation très succincte du principe de leur
commande pour une application véhicule électrique.
3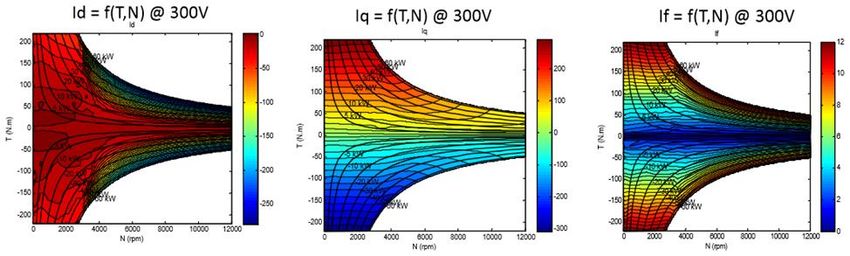
Ces moteurs sont dits conventionnels, car ils sont triphasés, et créent dans l’entrefer un champ
magnétique radial tournant à répartition spatiale sinusoïdale. De plus, ils ont un stator de même
type. Il est constitué d’un empilement de tôles ferromagnétiques isolées électriquement entre
elles, et pourvues d’encoches dans lesquelles on vient loger des conducteurs. Le procédé de
fabrication automatisé du stator et du rotor est parfaitement éprouvé depuis très longtemps.
2.1 - Moteur synchrone à aimants permanents
Aujourd’hui, 93 % des moteurs de véhicules électriques sont à aimants permanents [7]. Ce moteur
est plébiscité par la grande majorité des constructeurs, principalement pour deux raisons. La
première est que l’excitation magnétique créée par les aimants ne consomme pas d’énergie. Le
moteur possède donc naturellement un bon rendement, du moins sur une certaine plage de
vitesse et de couple. Pour une autonomie donnée, cela permet de mettre une batterie de
moindre capacité, donc moins chère et moins lourde. La deuxième raison est sa compacité. Pour
un couple et une puissance maximales donnés, le moteur est plus léger et moins volumineux que
les autres technologies.
La compacité du moteur est un critère de choix prédominant pour les véhicules hybrides, en
raison de la place limitée pour loger une ou plusieurs machines électriques. Cela l’est moins pour
un véhicule tout électrique.
Citons comme exemples quelques modèles très courants tout électriques ou hybrides pourvus de
ce moteur (figure 4) [8] : la Nissan Leaf, la BMW i3, la Toyota Prius, la Kia e-Niro, et la Tesla
modèle 3 (pour sa version propulsion). La Peugeot e208 (commercialisée à l’automne 2019), et la
Volkswagen ID3 s’apprêtant à être livrée en 2020, sont aussi équipées d’un moteur synchrone à
aimants permanents.
Figure 4 : Leaf, BMW i3, Prius, Tesla model 3, source [8]
Pour avoir de bonnes performances, les aimants choisis sont de type terres rares. Ce sont des
aimants à haute densité d’énergie constitués d’un alliage de Néodyme, de fer et de Bore (aimants
Nd-Fe-B) qui est le plus utilisé dans les machines électriques. Ces aimants ont une induction
rémanente et un champ coercitif élevés, comme le montre la figure 5 [9].
Figure 5 : Courbe de démagnétisation d’un aimant Nd-Fe-B en fonction de la température, source [9]
Une limitation de ces aimants est leur capacité à conserver leurs propriétés magnétiques à haute
température. Pour améliorer la tenue en température, les constructeurs rajoutent une autre
4
terre rare, dite lourde, telle que le dysprosium, ou le terbium qui est beaucoup plus chère que le
néodyme, ce dernier étant une terre rare dite légère.
Les constructeurs occidentaux sont dépendants de la Chine qui détient le monopole de la
production des terres rares. Ils subissent une forte volatilité de coût comme le montre la figure 6,
où en 2011, le prix du dysprosium a été multiplié par 12 par rapport au prix actuel [10].
Figure 6 : Évolution du prix des terres rares lourdes, source [10]
Cela entraîne donc un coût de fabrication du moteur à aimants très fluctuant, et aléatoire.
Aujourd’hui, le coût des aimants représente en moyenne 30 % du coût total du moteur.
Un des objectifs des concepteurs de moteurs à aimants est alors de réduire la masse des aimants,
tout en maintenant les performances en termes de densité de couple, de rendement, et de tenue
en température. Par exemple, au lieu de mettre du dysprosium dans tout le volume de l’aimant,
il est possible, grâce à des modélisations, d’en mettre seulement dans certaines zones, qui sont
les plus sensibles à la température et dont le risque de démagnétisation est le plus important
[40].
Il existe plusieurs manières de disposer les aimants au rotor, comme l’illustre la figure 7 [11]. Ils
peuvent être montés à la surface du rotor (structures a, b, c) ou bien à l’intérieur du rotor
(structures d, e, f, g). Ces dernières structures sont appelées IPM (Interior Permanent Magnet) et
sont les mieux adaptées pour une application de traction électrique.
Figure 7 : Différentes typologies de machines synchrones à aimants, source [11]
5
En effet, par rapport aux structures à aimants en surface, les structures enterrées confèrent au
moteur une bonne capacité de surcharge, et une grande plage de vitesse grâce à ses possibilités
de défluxage [11] [12]. De plus ils présentent moins de risque d’être éjectés par la force
centrifuge à haute vitesse, et ils sont moins sensibles à la démagnétisation. Pour finir, l’induction
dans l’entrefer est plus élevée, contribuant à une meilleure compacité et un rendement
amélioré.
Notons que la typologie g) correspond à une structure synchro-réluctante assistée par des aimants
permanents [13]. Les aimants, logés dans des encoches circulaires créant des barrières au passage
du flux, permettent d’améliorer le rendement, le facteur de puissance et la plage de vitesse à
puissance constante par rapport à une machine synchro-réluctante pure. Elle a fait l’objet de
beaucoup de recherche, mais ne se retrouve toujours pas actuellement dans les moteurs des
véhicules.
Selon les constructeurs, la disposition et le nombre d’aimants diffèrent. Par exemple la figure 8
montre une tôle de rotor du moteur de la Nissan Leaf 2012 [14]. C’est un rotor qui a 8 pôles.
Chaque pôle est créé par 3 rangées d’aimants formants une structure de type “nabla“. Ces
aimants sont logés dans des encoches à l’intérieur du rotor.
Figure 8 : Tôle rotorique du moteur de la Leaf 2012 [14]
La figure 9 montre le rotor à aimants de la Tesla model 3 [15]. Il y a 6 pôles et chaque pôle est
formé par deux rangées d’aimants disposés en V. La puissance maximale du moteur est de 211
kW. Ce moteur a intrigué et fortement impressionné les spécialistes qui l’ont démonté et
examiné, car il est non seulement beaucoup plus puissant que ceux de la Chevrolet Bolt et de la
BMW i3, mais il est aussi plus léger, plus petit, son rendement est supérieur et sa production
serait moins onéreuse [16].
Figure 9 : Moteur à aimants de la Tesla model 3, source [15]
6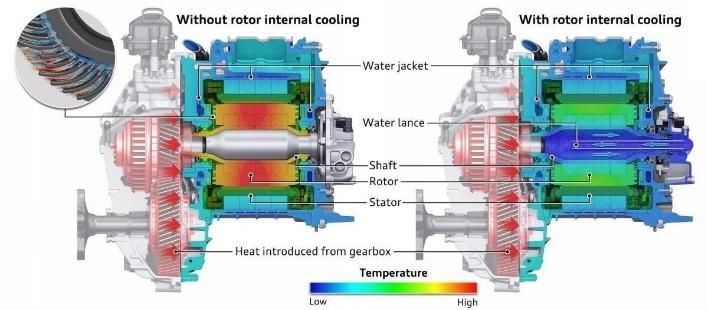
Enfin, la figure 10 montre le rotor du moteur de la BMW i3 en cours d’assemblage [17].
Axe q
Axe d
Figure 10 : Rotor du moteur de la BMW i3 en cours d’assemblage, source [17]
Le rotor a 12 pôles. Chaque pôle est réalisé à l’aide de deux couches d’aimants en parallèle sous
la surface externe du rotor. A l’extrémité de chaque aimant sont rajoutés des trous permettant
d’augmenter la saillance du rotor et de diminuer les pertes fer à haute vitesse [18].
Dans une machine synchrone, le couple électromagnétique total est la contribution de deux
couples de natures différentes. Le premier, appelé couple hybride est dû à l’interaction entre le
champ magnétique créé par l’induit (le stator) et le champ d’excitation créé par les aimants, ou
les bobines de l’inducteur (le rotor). Le deuxième, appelé couple réluctant est causé par une
saillance rotorique. La sMoetaillance est la création de chemins privilégiés pour le passage du flux
magnétique dans le rotor. C’est-à-dire que sur un tour complet du rotor, il y a alternance de
chemins de faible réluctance (passage du flux facile) et de chemins de forte réluctance (passage
du flux difficile). Lorsqu’il existe un champ magnétique d’induit fixe dans l’espace, le rotor, sans
ses aimants, tourne et vient se caler dans une position telle que le flux magnétique résultant de
l’alimentation des trois phases soit maximum.
On observe sur la figure 10 que l’axe d (axe d’un pôle inducteur) offre une réluctance plus grande
que l’axe q (axe inter pôles) car la perméabilité d’un aimant est proche de celle de l’air. Il
s’ensuit donc une inductance d’axe d (Ld) plus faible que l’inductance d’axe q (Lq). On dit alors
que le rotor présente une saillance inverse, contrairement à un rotor bobiné de moteur synchrone
où la saillance est directe (Ld > Lq).
Dans une structure IPM, la contribution du couple hybride est prépondérante par rapport au
couple réluctant dans la création du couple total (environ 70 à 80 % selon les géométries). Lors de
la conception du moteur, il y a alors un intérêt à renforcer la saillance afin d’augmenter le couple
réluctant, ce qui permet de diminuer le couple hybride, et donc la masse des aimants.
La figure 11 montre les courbes de couple et de puissance mécaniques maximales du moteur de la
BMW i3 [19]. Le couple maximal est de 250 Nm entre 0 et 4775 tr/min. La puissance mécanique
est de 125 kW, et reste quasi constante jusqu’à la vitesse maximale de 11500 tr/min. Cette
possibilité de maintenir une puissance élevée sur une grande plage de vitesse est justement due à
la structure du rotor à aimants enterrés, associée à un dimensionnement adéquat [12].
Figure 11 : Courbes de couple et de puissance mécanique maximales du moteur de la BMW i3, source [19]
7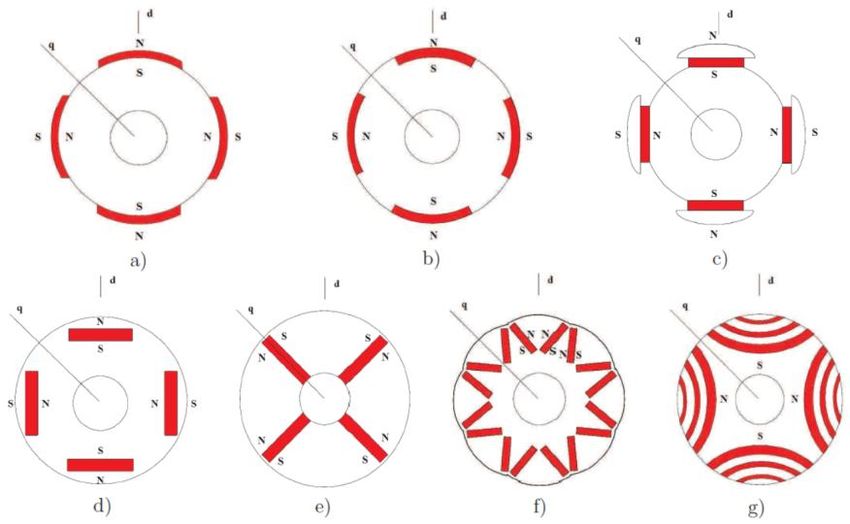
Ce moteur est alimenté par un onduleur de tension triphasé avec une tension batterie nominale
de 360 V. Le refroidissement liquide du moteur est réalisé à l’aide de tubes en forme de spirale
autour du stator [18] (figure 12). Le rotor ayant très peu de pertes, n’a pas à être refroidi, ce qui
est aussi un avantage, pour la simplicité du système de refroidissement.
Figure 12 : Refroidissement du moteur de la BMW i3, source [18]
Principe de la commande du moteur
Pour une application de véhicule électrique, le moteur est piloté en couple, c’est-à-dire que la
sollicitation du conducteur par la pédale d’accélérateur définit le couple moteur requis.
L’onduleur alimente le moteur par des courants asservis en amplitude et en phase grâce à la
position du rotor qui est mesurée par un résolveur ou un codeur optique. Le moteur est dit
autopiloté. Pour avoir de bonnes performances en termes de dynamique, précision de réglage, et
gestion du défluxage, la commande vectorielle est traditionnellement utilisée. Il s’agit alors
d’asservir 2 courants fictifs id et iq dans un repère (d-q) lié au rotor.
On peut montrer que le couple électromagnétique s’exprime en fonction de ces 2 courants [20].
Pour imposer une valeur de couple, il existe donc une infinité de valeurs (id,iq) possibles, avec des
contraintes de courant et tension maximales en sortie d’onduleur. La stratégie utilisée est de
choisir le binôme (id,iq) permettant de maximiser le rendement global (moteur + convertisseur de
puissance) dans tout le plan vitesse-couple.
La figure 13 montre ainsi la cartographie de rendement du moteur de la BMW i3 [18]. On constate
que le meilleur rendement est obtenu sur une plage de vitesse moyenne (entre 2500 tr/min et
9000 tr/min), et pour des couples plutôt élevés. C’est une caractéristique générale des moteurs à
aimants. Pour des couples plus faibles le rendement baisse, et d’autant plus que la vitesse est
importante. En effet, un problème du moteur synchrone à aimants est son mode de défluxage.
Lorsque la tension maximale onduleur est atteinte pour la vitesse de base, la seule possibilité
pour accélérer est d’augmenter la valeur absolue du courant id, sa valeur étant négative. Pour les
faibles couples à haute vitesse, l’amplitude des courants, et donc les pertes par effet Joule,
restent alors importantes, ce qui contribue à faire baisser le rendement.
Figure 13 : Cartographie de rendement du moteur de la BMW i3, source [18]
8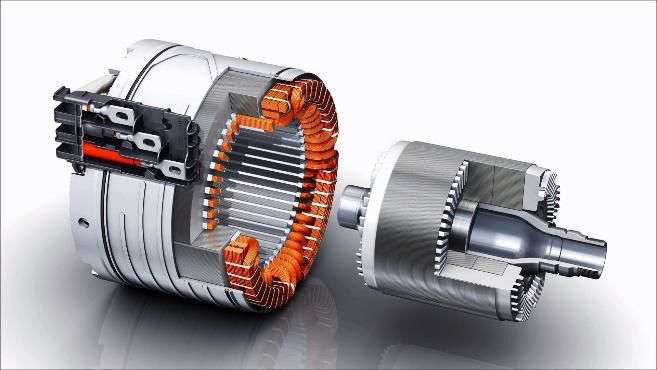
Nous constatons aussi que le rendement est moins bon à basse vitesse. Ceci est une
caractéristique commune à tous les moteurs. Le rendement baisse (plus ou moins) lorsque la
puissance n’est pas importante.
2.2 - Moteur à induction
Ce moteur est avec les moteurs synchrones à rotor bobiné, et les moteurs à réluctance variable
(synchro-réluctant et double saillance), une solution alternative aux moteurs à aimants à terres
rares. Plusieurs constructeurs ont fait ce choix, tels que le Californien Tesla, avec ses modèles S
et X, ainsi que les constructeurs Allemands : Audi pour le SUV e-tron et Mercedes-Benz pour son
nouveau EQC [21] (figure 14).
Figure 14 : Tesla model S P100D, Audi e-tron, Mercedes-Benz EQC 400, source [21]
Quelques véhicules à vocation urbaine sont aussi pourvus de moteurs à induction, tels que le
Renault Twizy, la Mia, et des Tuk Tuk électriques pour le tourisme (figure 15) [22].
Ce moteur est aussi choisi pour certains véhicules de transport routiers, tels que le bus électrique
eCitaro de Mercedes-Benz [23] (figure 16).
Figure 15 : Renault Twizy, Mia, Tuk Tuk électrique, source [22]
L’essieu arrière du eCitaro est doté de moteurs montés sur les moyeux des roues. Chacune des
roues de cet essieu portique électrique porte un moteur asynchrone refroidi par eau. Chaque
moteur développe 125 kW, soit une puissance totale de 250 kW, pour un couple de 2 x 485 Nm
départ arrêté.
Figure 16 : Bus électrique Mercedes-Benz eCitaro, source [23]
9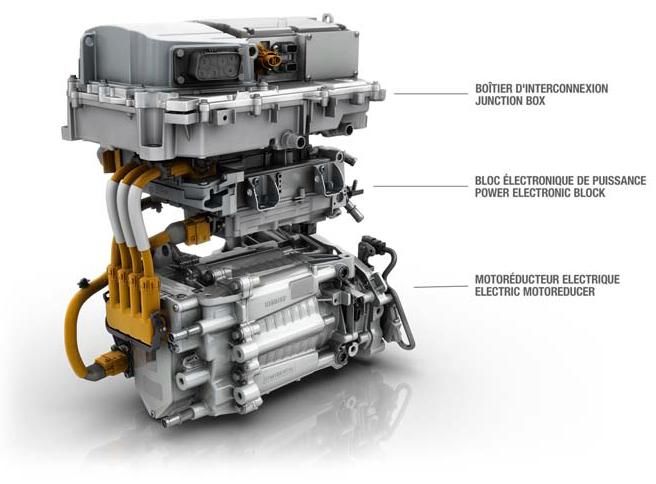
Les avantages du moteur à induction sont les suivants :
Conception simple, coût de fabrication faible et stable, expérience de sa fabrication en
série ;
Bonne robustesse mécanique du rotor, grandes vitesses de rotation entraînant une
puissance massique assez élevée ;
Le rotor peut accepter des températures élevées (pas d’aimants donc pas de risques de
démagnétisation) ;
Puissance continue importante, à la condition d’avoir un refroidissement performant,
Pas de pertes lorsque l’alimentation est coupée ;
Meilleure robustesse vis-à-vis de la défaillance du convertisseur de puissance.
Ses inconvénients sont les suivants :
Rendement maximal moins bon que le moteur synchrone à aimants à cause des pertes
Joule au rotor, et dans une zone plus restreinte du plan vitesse-couple ;
Plage de vitesse à puissance maximale constante limitée ;
Pertes au rotor difficiles à évacuer.
Les constructeurs Tesla, Audi, et Mercedes-Benz ont néanmoins choisi ce moteur car il est bien
adapté pour le cahier des charges de leurs véhicules. Ce sont des véhicules dotés de grosses
batteries (jusqu’à 100 kWh) donc de masse élevée (jusqu’à 2,5 t), ayant de très bonnes capacités
d’accélération (0 à 100 km/h en moins de 5 s), et pouvant rouler à haute vitesse (jusqu’à 250
km/h). La puissance motrice maximale doit donc être très importante, ainsi que la puissance
motrice devant être soutenue en régime continu. La transmission mécanique étant à rapport de
réduction fixe, pour la vitesse maximale du véhicule, le moteur doit pouvoir tourner à un régime
très élevé (jusqu’à 18000 tr/min).
Pour ces caractéristiques, le dimensionnement d’un moteur synchrone serait d’un coût beaucoup
trop élevé. Le choix du moteur à induction est de plus renforcé par le fait que le rendement sur
cycle de l’ensemble moteur + convertisseur est un critère de second rang, dû à la capacité
importante des batteries et la possibilité de les charger à très forte puissance (jusqu’à 200 kW).
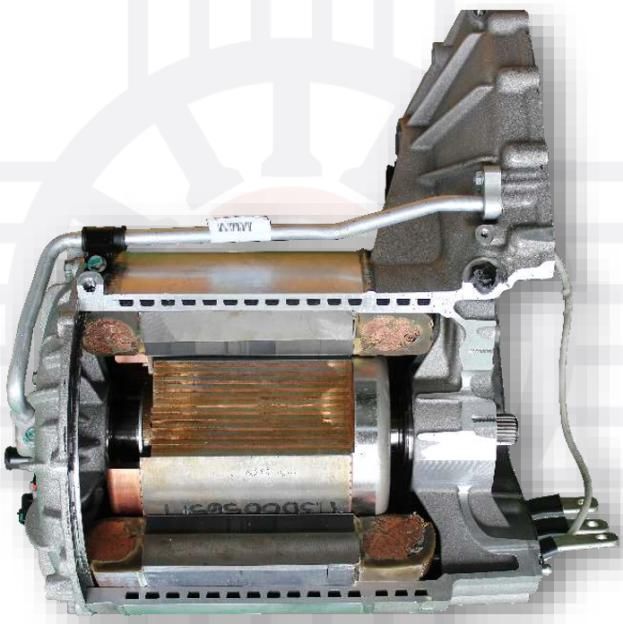
Tesla a donc développé pour ses modèles S et X un moteur à induction de forte puissance avec
une densité de couple élevée, et équipé d’un rotor à cage en cuivre coulé sous pression [14]
(figure 17). L’entreprise hérite de toute l’expérience accumulée dans le passé dans la conception
de ces types de moteurs pour l’EV1 de General Motors [24], le tzero de l’entreprise “AC
Propulsion“ [25], et le Tesla roadster de première génération [25]. L’intérêt d’un rotor à cage en
cuivre par rapport à l’aluminium, métal le plus couramment utilisé, est sa plus faible résistivité,
ce qui engendre moins de pertes par effet Joule au rotor. Par rapport à un moteur à cage
aluminium, il est alors possible de diminuer les dimensions du moteur à rendement identique, ou
d’augmenter le rendement à dimensions identiques, ou encore d’accroître la puissance continue à
dimensions et rendement identiques. La contrepartie est sa plus forte masse et son prix plus
élevé.
La figure 18 montre les courbes maximales de couple et de puissance mécanique de ce moteur
[26]. Il peut développer un couple maximal de 600 Nm et une puissance maximale de 310 kW
(pour les versions de véhicules avec des batteries de capacité importante). Au couple maximal,
les courants de phase dépassent les 1000 A.
10Figure 17 : Moteur à induction de la Tesla model S [14] (Stator : OD = 254 mm ; SL = 152,6 mm)
Figure 18 : Courbes enveloppes de couples et de puissance mécanique du moteur à induction de la Tesla
model S, source [26]
Le refroidissement du moteur, très élaboré, est réalisé par circulation forcée de liquide dans le
stator et dans le rotor au travers de l’arbre creux, ce qui permet d’extraire le maximum de
pertes et contribue à augmenter la puissance en régime de fonctionnement continu. Il a fait
l’objet de plusieurs brevets [27] [28] (figure 19).
Figure 19 : Refroidissement liquide du moteur à induction Tesla, source [28]
11Comme pour les Tesla modèles S et X, l’Audi e-tron est équipée de 2 moteurs à induction, un sur
chaque train. La puissance peut donc être transmise à ces derniers en fonction des conditions
d’adhérence et de la demande de puissance du conducteur. En condition de circulation normale,
seul le moteur arrière fonctionne afin d’avoir un meilleur rendement global.
Le choix d’Audi pour ce moteur est clairement dicté par des considérations de puissances en
régime continu assez importantes à tenir, en raison de la masse du véhicule, des possibilités
d’accélération répétées, et d’un mode boost pendant 10 s.
La figure 20 montre le groupe motopropulseur Audi monté sur le train avant de l’e-tron [29].
Figure 20 : Groupe motopropulseur Audi APA250, Figure 21 : Moteur Audi APA250,
source [29] source [30]
Ce groupe motopropulseur est constitué d’un moteur à induction à cage en aluminium (figure 21).
Ses caractéristiques maximales de couple et de puissance mécaniques sont montrées à la figure
22. On peut noter une puissance en régime continu remarquable de 40 kW pour ce moteur dont le
diamètre extérieur du stator est de 245 mm, et de longueur active 120 mm. Comme pour la
Tesla, on constate aussi que la puissance maximale du moteur n’est obtenue que sur une plage de
vitesse très limitée. Cela est dû au fait que le moteur est très poussé (puissance maximale très
grande devant la puissance continue). Ainsi, dans la zone de défluxage, à partir d’une certaine
vitesse, la courbe de couple rejoint la courbe enveloppe du couple de décrochage, qui lui diminue
selon l’inverse du carré de la fréquence statorique. La puissance mécanique ne peut donc plus
être maintenue constante.
Figure 22 : Caractéristiques de couple et de puissance mécanique du moteur Audi APA250, source [31]
De la même manière que Tesla, le constructeur a développé un système de refroidissement
liquide du moteur très élaboré, avec circulation du fluide dans l’arbre du rotor et sur ses flasques
(figure 23) [32] [33]. Cela contribue à augmenter la puissance soutenue en continu.
12Figure 23 : Circuit de refroidissement du moteur Audi APA250, source [32], et répartitions de la
température dans le moteur (avec et sans refroidissement interne du rotor), source [33]
Le moteur à induction, avec son faible coût, peut être une solution intéressante pour le futur
développement en masse (s’il a lieu) de véhicules à vocation urbaine, par exemple pour
l’autopartage. En effet, ces véhicules doivent être économiques pour les collectivités. Ils ne font
qu’un faible kilométrage sur une journée et devront pouvoir être chargés à chaque station.
L’efficacité énergétique n’est donc pas là aussi, le critère le plus important pour ce type de
véhicule.
Le moteur à induction peut aussi être utilisé en complément de motorisation dans les véhicules
tout électriques et hybride car dans certaines conditions il est plus avantageux que le moteur
synchrone à aimants. Par exemple, la dernière version de la voiture hybride Toyota Prius est une
4 roues motrices (4 WD). Le train avant est équipé d’un moteur à essence couplé à 2 machines
électriques synchrones à aimants permanents (comme pour les versions antérieures), et le train
arrière (figure 24) est équipé d’un petit moteur à induction (5,3 kW/55 Nm) [34]. Ce moteur est
utilisé pour le démarrage et pour le déplacement à faible vitesse en 4 roues motrices en
conditions d’adhérence difficiles. Pour des vitesses plus élevées, seul le train avant fonctionne.
Afin de limiter les pertes d’entraînement, et donc d’optimiser la consommation d’énergie, un
moteur à induction n’engendrant pas de pertes magnétiques car non magnétisé lorsqu’il n’est pas
alimenté, était préférable au moteur synchrone à aimants, qui lui engendre toujours ces types de
pertes même lorsqu’il tourne à vide.
Figure 24 : Train arrière de la Prius 4WD, source [34]
Autre exemple, la Tesla modèle 3 en version “Dual Motor“ est équipée d’un moteur synchrone à
aimants sur le train arrière, et d’un moteur à induction sur le train avant (figure 25) [16].
Cela confère au véhicule les avantages des 4 roues motrices. La stratégie de commande des
moteurs consiste à utiliser seulement le moteur arrière en fonctionnement normal (vitesse faible
à modérée, besoin de puissance relativement limité, conditions d’adhérence normales) car celui-
ci est plus efficace que le moteur à induction pour ce type de fonctionnement. Comme pour la
13Prius 4WD, le moteur à induction, non alimenté, est préférable au moteur à aimants. En cas de
besoin supplémentaire de puissance, le moteur à induction est utilisé avec le moteur arrière.
De plus, pour les hautes vitesses, le moteur avant peut être plus efficace que le moteur arrière, à
condition qu’il ait été bien optimisé pour ces vitesses. Ainsi, dans le cas où la puissance
demandée n’est pas trop élevée, le moteur à induction peut fonctionner seul ou fournir plus de
puissance que le moteur arrière, afin d’augmenter le rendement global de la batterie aux roues.
Cette architecture qui combine deux technologies différentes de motorisation permettrait donc
de rajouter un degré de liberté dans l’optimisation de l’efficacité énergétique du véhicule. Le
moteur à aimants serait optimisé pour les basses et moyennes vitesses, et le moteur à induction,
pour les hautes vitesses.
Figure 25 : Motorisation de la Tesla Modèle 3 dual motor, source [16]
Principe de la commande du moteur à rendement maximal
Comme pour le moteur synchrone, le moteur à induction est alimenté par un onduleur de tension
triphasé. La commande de l’onduleur permet d’imposer au moteur les courants statoriques en
amplitude et fréquence afin de respecter les consignes de couple et de flux. La commande
vectorielle à flux rotorique ou statorique orienté, associée à des observateurs permet d’obtenir
de très bonnes performances, en termes de dynamique, précision de réglage et robustesse vis-à-
vis des variations paramétriques du moteur, en particulier la résistance rotorique dans le cas
d’une commande vectorielle à flux rotorique orienté.
En partant du schéma équivalent monophasé (valable uniquement en régime permanent) avec
fuites magnétiques totalisées au stator, on peut démontrer que le couple électromagnétique
dépend de 2 grandeurs : la valeur efficace du flux rotorique φ’R et la pulsation des courants
rotoriques ωR. Pour imposer une certaine valeur de couple, une infinité de couples de valeurs
(φ’R,ωR) sont à priori possibles, avec comme contraintes le courant maximal et la tension
maximale (fixée par la tension de la batterie et la stratégie de modulation) en sortie d’onduleur.
Il est donc possible de choisir le couple de valeurs permettant d’optimiser un critère. Pour les
véhicules électriques, le critère privilégié est le rendement global moteur + convertisseur de
puissance. A partir d’un modèle de pertes (calculées ou mesurées), il est alors possible de
déterminer les paramètres de réglage optimaux afin de maximiser le rendement global pour tout
point de fonctionnement dans le plan vitesse-couple. Le flux rotorique est alors ajusté en temps
réel par la commande vectorielle pour être toujours au maximum de rendement. Pour une vitesse
donnée, sa valeur optimale augmente à mesure que le couple augmente.
14À titre d’exemple, la figure 26 montre la cartographie optimale de rendement du moteur (sans le
convertisseur) de la Tesla model S [14]. On constate que la zone de meilleur rendement est située
vers des vitesses moyennes à élevées et pour des couples moyens.
Figure 26 : Cartographie de rendement du moteur à induction de la Tesla model S, source [14]
Même avec la commande optimale, ce moteur est pénalisé par un rendement beaucoup moins
favorable vers les basses vitesses, et d’autant plus que le couple est élevé. La raison principale
est, qu’à basse vitesse et couple élevé, le glissement est important, ce qui fait chuter le
rendement du rotor.
2.3 - Moteur synchrone à rotor bobiné
Le constructeur Renault est aujourd’hui le seul à utiliser cette technologie. Ses motivations
étaient dès l’origine liées à une volonté de ne pas dépendre du problème de coût et de
l’approvisionnement en terres rares. S’offrait alors à lui la possibilité de choisir trois technologies
sans aimants. Les moteurs à induction et à réluctance variable n’ont pas été retenus à cause
principalement de leurs rendements sur cycle et de leurs plages de vitesse à puissance constante
moins bons que pour le moteur à rotor bobiné.
Le moteur synchrone à rotor bobiné n’avait jamais été utilisé auparavant pour des véhicules
routiers. En traction électrique ferroviaire, Alstom est la seule entreprise qui avait développé ce
moteur pour la locomotive BB26000 “Sybic“ et le TGV Atlantique (8 moteurs de 1100 kW).
Parmi les avantages de ce moteur, on peut citer les points suivants :
Moteur facilement défluxable, grâce au réglage d’un courant continu au rotor à l’aide d’un
hacheur associé à une boucle de régulation de courant ;
Plage de vitesse à puissance maximale constante très importante, possible en théorie de la
vitesse de base jusqu’à la vitesse maximale ;
Fonctionnement possible à facteur de puissance unitaire, ce qui permet de minimiser les
courants de phase et donc de réduire le calibre en courant des transistors du convertisseur
de puissance, ou de réduire ses pertes par conduction et par commutation ;
Optimisation du rendement global moteur + convertisseur dans tout le plan vitesse-couple,
grâce à 3 paramètres de réglage ;
Bon rendement (> 95 %) dans une zone très large du plan vitesse-couple, ce qui permet
d’obtenir un bon rendement global sur cycle WLTP.
Comme pour les autres technologies, ce moteur est pénalisé par quelques inconvénients :
Puissance et couple massiques et volumiques plus faibles que pour le moteur à aimants.
15Remarquons que pour les véhicules tout électriques actuels, ceci n’est pas un handicap
sévère car le groupe moto propulseur est de toute façon moins encombrant qu’un moteur
thermique associé à sa transmission (embrayage + boîte de vitesse + différentiel). Cela
n’est pas le cas pour un véhicule hybride, où la place disponible pour loger une machine
électrique est beaucoup moins importante ;
Nécessité de refroidir le rotor à cause des pertes Joule dues à l’excitation ;
Vitesse maximale moins élevée que pour les moteurs à induction à cause des efforts
centrifuges s’exerçant sur les bobines rotoriques ;
Moteur plus difficile à fabriquer, donc coût de fabrication plus élevé que pour les autres
moteurs sans aimants.
Au début, Renault avait fait appel à l’équipementier Allemand Continental pour la motorisation
des véhicules Fluence ZE, Kangoo ZE, et la Zoé de première génération (figure 27) [35]. Ces
moteurs (nommés 5A Gen1 et 5A Gen2 pour la Zoé), à refroidissement liquide, avaient une
puissance allant de 44 kW à 70 kW selon le véhicule, et un couple maximal de 220 / 226 Nm. Ils
étaient dotés d’un rotor à 8 pôles.
Figure 27 : Renault Fluence ZE, Kangoo ZE et Zoé, source [35]
La figure 28 montre le groupe moto propulseur Continental (ensemble moteur + transmission +
convertisseur de puissance moteur + chargeur) équipé du moteur 5A Gen 1 [36].
Figure 28 : Groupe motopropulseur Renault-Continental et moteur 5A Gen1, source [36]
La figure 29 montre les caractéristiques maximales de couple et de puissance mécanique du
moteur 5A Gen2 de la Zoé [37]. La principale différence par rapport au moteur à induction est
que la puissance maximale peut être maintenue constante sur une très large plage de vitesse, et
cela en ajustant convenablement les paramètres de réglage du moteur. C’est l’une des
caractéristiques remarquables des moteurs synchrones à rotor bobiné.
16Figure 29 : Courbes enveloppes de couple et de puissance mécanique du moteur 5A Gen2 de la Zoé,
source [37]
Suite à divers problèmes de fiabilité, Renault a décidé de concevoir et de construire son propre
moteur dans les usines de Cléon (Normandie). Ce moteur, le 5A Gen3, équipe depuis 2015 tous les
nouveaux véhicules électriques Renault (excepté le Twizy). Il aura nécessité environ 3 années de
développement durant lesquelles le constructeur a consulté différents partenaires dont son allié
Nissan qui fabrique déjà son propre moteur pour la Leaf.
Il y a eu plusieurs challenges afin de concevoir un moteur à la fois performant et robuste, tout en
limitant les coûts de fabrication [38]. Renault a dû travailler particulièrement sur :
Le contrôle optimal du moteur afin de maximiser le rendement global moteur +
convertisseur dans tout le plan vitesse-couple.
Remarque : la commande vectorielle de ce moteur est plus délicate que celle d’un moteur
synchrone à aimants car il y a un couplage statique et dynamique entre les bobinages
rotoriques et statoriques. Ainsi une variation de courant sur l’un des bobinages perturbe la
régulation des courants des autres bobinages. Ce phénomène est entretenu par des
imperfections telles que l’excentricité du rotor (très faible mais toujours présente), les
harmoniques d’espace du stator et les non-linéarités de l’onduleur ;
Le refroidissement du moteur, et particulièrement le rotor toujours beaucoup plus difficile
à refroidir ;
La mise au point du système bagues-balais devant être robuste vis-à-vis des conditions
climatiques variables, de la pollution et des vibrations. Un point clé du cahier des charges
était que ce dispositif ne devait pas subir de maintenance sur la durée de vie prévue du
véhicule (> 200000 km) ;
La tenue mécanique des bobines rotoriques à haute vitesse (12000 tr/min pour ce
moteur) ;
La technique de bobinage du rotor afin d’optimiser le coefficient de remplissage et
l’échange thermique avec le circuit magnétique, et minimiser les contraintes mécaniques.
Par rapport à son prédécesseur, ce moteur tétrapolaire est plus compact et plus léger, possède
un meilleur rendement, et a un refroidissement interne par air forcé entre le stator et le rotor.
Pour la Zoé dotée d’une batterie de 22 kWh, le simple changement de moteur a fait passer son
autonomie de 210 kms à 240 kms sur cycle NEDC.
Les figures 30 et 31 montrent le nouveau groupe moto propulseur Renault 5A Gen3. Pour la
dernière version de la Zoé, sortie en 2019 (la Zoé ZE50, pour une batterie de 52 kWh), il y a deux
versions de ce moteur selon la puissance développée (80 kW / 225 Nm ou 100 kW / 245 Nm).
17Figure 30 : Groupe moto propulseur Renault 5A Gen3, source [37]
Figure 31 : Groupe motopropulseur Renault 5A Gen3, source [37], et rotor bobiné 4 pôles
Principe de la commande du moteur à rendement maximal
La commande en couple du moteur synchrone à rotor bobiné se fait à l’aide de 3 paramètres de
réglage : la valeur efficace du courant statorique IS, l’angle d’autopilotage ψ qui est le déphasage
entre un courant de phase et la force électromotrice correspondante, et le courant d’excitation I f
dans le rotor (aussi appelé inducteur ou roue polaire). Pour la commande des moteurs, on préfère
souvent travailler dans un repère (d-q) lié au rotor (axe d orienté sur l’axe du flux inducteur). Les
trois courants statoriques iaS, ibS et icS sont alors transformés en deux courants Id et Iq (courants
d’axes direct et en quadrature). Pour une vitesse donnée, il existe donc une infinité de triplets
(Id,Iq,If) permettant de satisfaire le couple demandé. L’idée, comme pour les autres moteurs, est
de choisir, à partir d’un modèle de pertes, le triplet optimal permettant de maximiser le
rendement global moteur + convertisseur de puissance dans tout le plan vitesse-couple. La figure
32 montre la cartographie de ces 3 paramètres de contrôle pour le moteur 5A Gen3 [38]. Comme
pour le moteur à induction, la stratégie de commande à rendement maximal entraîne une
augmentation du flux (mais ici réglé au rotor par le courant If) lorsque le couple augmente pour
une vitesse donnée. Le courant Iq augmente aussi avec le couple et son signe définit le mode
traction/freinage du moteur. Quant au courant Id, toujours négatif pour un moteur synchrone à
rotor bobiné, il reste faible dans une large zone du plan vitesse-couple, et augmente fortement
en valeur absolue pour de fortes puissances dans la zone de défluxage.
Figure 32 : Cartographie des paramètres de contrôle optimaux du moteur Renault à rendement maximal,
source [38]
183 – Conclusion
Dans cet article, nous avons présenté de manière condensée les trois technologies de
motorisation de véhicules électriques actuellement utilisées par les constructeurs automobiles.
Elles sont basées sur des structures de moteurs conventionnelles, car éprouvées depuis très
longtemps et dont les procédés de fabrication sont parfaitement maitrisés, ce qui est pour
l’industriel un gage de sureté concernant la fiabilité et la maitrise des coûts de fabrication.
Néanmoins, il est toujours possible d’améliorer les performances de chaque type de moteur.
Beaucoup d’innovations technologiques sont alors mises en œuvre, au niveau des matériaux
utilisés, de la géométrie, du bobinage, et du refroidissement. Les industriels travaillent donc dans
l’amélioration de l’existant, sans véritables ruptures technologiques.
Nous avons pu mettre en évidence les différentes caractéristiques pour chaque type de moteurs.
Actuellement, le moteur synchrone à aimants permanents fait quasiment l’unanimité des
industriels, dû fait principalement de son bon rendement et de sa compacité. En 2018, 4,3
millions de véhicules tout électriques et hybrides ont été vendus dans le monde. Ce nombre
pourrait monter à 12,5 millions d’unités en 2025 et 32 millions en 2030 selon le cabinet Adamas,
qui table aussi sur un recours croissant aux moteurs à aimants. La demande en terres rares va
donc augmenter et donc mécaniquement leurs coûts.
Il est donc important de développer en parallèle avec les moteurs actuels à aimants, d’autres
technologies, avec beaucoup moins ou sans terres rares. La part de ces technologies alternatives
pourrait donc certainement progresser, avec par exemple la mise sur le marché de nouvelles
machines dites synchro-reluctantes assistées d’aimants à faible densité d’énergie, bien connue
des chercheurs [39].
Références :
[1]: https://www.usinenouvelle.com/article/jusqu-ou-ira-la-jamais-contente.N192726
[2]: http://www.car-engineer.com/fr/les-differents-cycles-de-conduite
[3]:https://www.planeterenault.com/UserFiles/files/doc/2%20Caract%C3%A9ristiques%20techniq
ues%20Nouveau%20Renault%20ZOE.pdf
[4]: Z.Q. Zhu and D. Howe. Electrical machines and drives for electric, hybrid, and fuel cell
vehicles. Proceedings of the IEEE, 95 :746–765, 2007
[5]: https://insideevs.fr/news/361000/zf-boite-vitesses-vehicules-electriques/
[6]: https://insideevs.fr/news/353772/porsche-taycan-boite-vitesses/
[7]: https://www.usinenouvelle.com/article/des-terres-rares-a-gogo-dans-l-auto.N913579
[8]: https://www.nissan.fr
https://www.bmw.fr
https://www.toyota.fr
https://www.tesla.com/fr_fr
[9]: https://www.binder-magnetic.com
[10]: https://www.brgm.fr/sites/default/files/dossier-actu_terres-rares.pdf
19[11]: H. Dogan. Méthodologie de Conception des Machines Synchrones à Aimants Permanents -
Application au Véhicule Electrique avec Chargeur Rapide Embarqué. Thèse de doctorat,
Université de Grenoble, 2013
[12]: B. Multon. Analyse des possibilités de fonctionnement en régime de désexcitation des
moteurs à aimants permanents. Journal de Physique. III, 1995
[13]: W.L. Soong and N. Ertugrul. Field-weakening performance of interior permanent-magnet
motors. IEEE Transactions on Industry Applications, 38(5) :1251–1258, 2002
[14]: D. Staton, J. Goss. Open Source Electric Motor Models for Commercial EV & Hybrid Traction
Motors, 2017 – www.motor-design.com
[15]: https://cleantechnica.com/files/2018/05/ACTUAL-Rotor-close-up-with-laminates-3.jpg
[16]: www.auto-innovations.com/site/dossier8dopp/tesla3model43gprint.html
[17]: https://www.youtube.com/watch?v=wCg2sCV5HVM
[18]: http://actes.sge-conf.fr/2018/articles/article_188270.pdf
[19]: https://www.guillaumedarding.fr/technique-moteurs-electriques-7609409.html
[20]: B. Multon. Les Machines Synchrones Autopilotées. Préparation à l’agrégation de Génie
Electrique, ENS Cachan Bretagne, 1993-2010
[21]: https://www.audi.fr/fr/web/fr/gamme/tron/audi-e-tron.html
https://www.mercedes-benz.fr/passengercars/mercedes-benz-cars/e-
mobility/vehicles/eqc.module.html
https://www.tesla.com/fr_fr
[22]: https://www.renault.fr
https://www.automobile-propre.com/breves/la-mia-va-ressusciter-en-hongrie/
https://www.mobiliteplus-transport.fr
[23]: https://weekly.automotivepurchasingandsupplychain.com/120318/technology
[24]: https://www.automobile-propre.com/gm-ev1-histoire
[25]: https://evannex.com/blogs/news/75692101-from-tzero-to-model-s-how-ac-propulsion-was-
a-catalyst-for-tesla-motors
[26]: https://electrek.co/2017/11/20/teslas-next-gen-roadster-technical-analysis
[27]: Brevet Tesla Motors n° US 7489,057 B2. LIQUID COOLED ROTOR ASSEMBLY
[28]: Brevet Tesla n° US 2018 / 0091012 A1. ELECTRIC MOTOR HEATING / COOLING SYSTEM
[29]: https://www.audi-mediacenter.com/en/audimediatv/video/audi-e-tron-components-e-
engine-animation-4846
[30]: https://www.audi-mediacenter.com/en/technology-lexicon-7180/drive-system-7227
[31]: https://www.motor-talk.de/bilder/der-e-tron-faehrt-anders-als-andere-audi-g79938458/e-
tron-motoren-i209344531.html
20[32]: https://www.audi-mediacenter.com/en/audimediatv/video/audi-e-tron-cooling-concept-e-
motor-animation-4847
[33]: https://www.scoopnest.com/user/tsport100/1074050273318850560-audi-etron-electric-
motors-with-rotor-internal-cooling-right-picturethis-is-what-ensures-high-contin
[34]: http://news.hybridlife.org/explication-du-systeme-e-four-de-toyota-prius-4-reduction-des-
efforts-de-frottement
[35]: https://www.renault.fr/vehicules/vehicules
[36]: https://www.planeterenault.com/1-gamme/45-moteurs/5020-5agen1-ze-q90
[37]: https://www.planeterenault.com/1-gamme/45-moteurs/9816-5agen3-ze-r90
[38]: T. Nguyen, Renault Guyancourt France. MAGNET FREE ELECTRIC MACHINES FOR AUTOMOTIVE
POWERTRAINS. Journée 3EI, CNAM PARIS, 2016
[39]:
https://www.researchgate.net/publication/306089169_Electric_Vehicle_Traction_Based_on_Sync
hronous_Reluctance_Motors
[40]: https://product.tdk.com/info/en/techlibrary/archives/techjournal/vol08_hal/index.html
Ressource publiée sur Culture Sciences de l’Ingénieur : https://eduscol.education.fr/sti/si-ens-paris-saclay
21Vous pouvez aussi lire